结合频域显著性分析和形态学滤波的红外小目标检测算法
2022-11-12朱鸿泰
张 晔,朱鸿泰,程 虎,张 俊,章 琦
(中国电子科技集团公司第五十八研究所,江苏 无锡 214072)
1 引 言
近些年来,红外探测技术的快速发展为光电探测行业构建了新的格局,各行业引入红外手段辅助目标检测、定位,层出不穷的应用受到了广泛的关注。例如目标检测的军事应用[1-2],工业领域机器视觉的缺陷检测[3-4]等领域。红外目标检测一直是图像研究领域的热门方向,张明等人提出的红外接收PIN硅光电探测器研究[5]和高美静等人提出的电子器件分析用新型显微红外热像仪[6]均使用红外探测器实现红外小目标的检测。但对于微弱目标,由于其本身强度弱、携带的细节信息少极易淹没在背景杂波中,成为了红外探测研究方向的一个难点。
为了解决红外微弱目标准确检测的问题,提出了各类检测算法,按技术路线可分为滤波、目标函数优化[7]和数据驱动的深度学习模型[8]三类。其中滤波类算法计算复杂度最低,最为适合部署于实时探测场合,也是本文的研究重点。滤波理论的核心在于利用目标与背景先验信息的差异,设计滤波核在对抑制背景杂波的同时,凸显出红外小目标的自身图像特征,从而达到滤除背景提取前景目标的目的。张祥越等提出的ILCM[9]方法利用目标与其邻域对比度差异实现红外目标检测,但实时性差。显著性分析技术直接从全局提取空间/频率域突变区域,计算效率更具优势。根据Timor K等[10]的定义,“显著区域”是指在全局或局部邻域内,属性和尺度上呈现出不可预测性的区域。频率显著性分析[11]、光谱残差[12]和超复数傅里叶变换[13]等频域显著性算法均对微弱小目标展现出良好的召回率,但虚警概率明显增加。而形态学滤波方法对目标尺寸敏感和对离群噪点的高效滤除效果较好。叶斌等提出了基于形态学Top-Hat算子的小目标检测方法[14],计算效率高、去噪效果显著,但单一结构元无法保证检测召回率。Wang W等[15]提出的方法结合显著性检测和形态学滤波提高了目标的检测率,但是对于显著性较高的杂波无法很好抑制。徐文晴提出的基于自适应形态学滤波方法[16](LAF),对连续的杂波抑制效果不佳,无法有效排除角点杂波。
本文将有机结合显著性分析和形态学滤波技术,实现针对复杂场景的图像红外微弱目标探测。以频域显著性分析手段作为快速预处理步骤,实现对缓变背景的高效抑制。再引入自适应形态学滤波,提出全局红外小目标检测算法,对具有连续杂波的复杂场景实现红外小目标检测。本方法对适应性好,对背景杂波具有连续性的边缘特性实现了高效鉴别,同时保证了目标的召回率。
2 频域显著性分析预处理
2.1 频域显著性模型
视觉显著性[17]是视觉系统选择视觉信息的某个子集作为过滤器,只选择与当前行为或任务相关的感兴趣的信息,而忽略不相关的信息的能力。在文献[11]中利用ILCM获得频域显著图,需要对图像中每个像素作邻域滑窗进行处理,运行速度慢。HOU提出了一种不依赖目标的先验信息的基于频域的全局显著性模型[16],该模型基于傅里叶变换就可以实现,运算速度快,满足实时性要求。
给定红外小目标图像I,其前景和背景的表现形式为:
I=f+bf,b∈RM×N
(1)
其中,f表示小目标信号;b表示背景信号,两者均为稀疏的;M,N表示I,f,b信号的维度。


(2)
对于红外图像来说,图像的前景信息相对于背景来说更引人注意。因此,可以利用图像重构来构建显著图:

(3)
其中,G为高斯滤波器;“*”表示卷积运算;“∘”表示Hadamard乘积。
在图1中,对不同场景,利用显著性模型可得到显著图,复杂场景与简单场景相比较,二值化分割会保留许多背景信息,无法准确实现小目标检测。

图1 显著性检测效果图Fig.1 The performance of saliency detection
2.2 ROI区域提取
通过频域显著性分析后重构的图像已显著抑制了均匀、缓变的背景区域,获得SCR(信号-背景比)的大幅提升,有利于后续对目标的准确分割。出于计算效率的考虑,本文利用阈值分割技术对重构图做前景-背景分类,自适应分割阈值tthreshold通过公式(4)来计算
tthreshold=u+kσ
(4)
其中,u和σ分别为显著图S的均值和标准差;k为常数系数。图像阈值分割的二值化分类结果T以如式(5)的方式获得:
(5)
基于二值分类结果T内的连通域做最小外界矩形ROI提取,如图2所示,所有ROI区域均被视为候选目标区域。
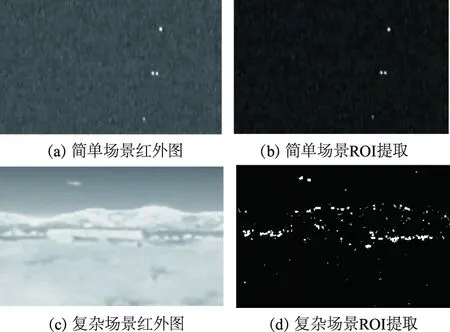
图2 ROI提取Fig.2 ROI extraction
通过获得目标显著图,提取ROI区域缩小了目标检测区域的范围,从而加快了目标检测效率。然而如图2(a)所示,对于简单场景情况,各候选区域周围依然存在许多的孤立噪点和背景杂波,因此需要选择一个合适的滤波器来抑制孤立噪点和杂波。对如图2(b)所示的复杂背景场景红外图,则感兴趣区域中呈现出大量伪目标感兴趣区域,影响目标检测结果。
3 局部自适应形态学滤波目标检测
经典Top-hat形态学滤波在红外弱小目标检测中有了比较成功的应用,通过选取合适的滤波模板,可以得到较好的滤波效果。但对于对于图像信噪比较低,噪声和复杂的背景会严重影干扰的情况下,滤波性能下降,严重时会降低图像信噪比。而新型Top-hat形态学滤波通过改变结构元素的构造来达到抑制噪声和复杂背景的目的。但是经典Top-hat和新型Top-hat形态学滤波在滤波开始前都要人工设定结构元的大小,对于尺度尺寸不断变化的目标无法,因而需要结构元有自适应选择功能。
本文算法中通过在感兴趣区域进行提取候选目标,获得候选目标轮廓及轮廓的外接矩形,如图3(a)所示。再将候选目标的位置及尺寸信息映射回原图像,在原图像上选取目标尺寸的八邻域作为滤波区域,如图3(b)所示。利用候选目标的长宽最大值作为新型结构元的尺寸,达到自适应形态学滤波的目的。
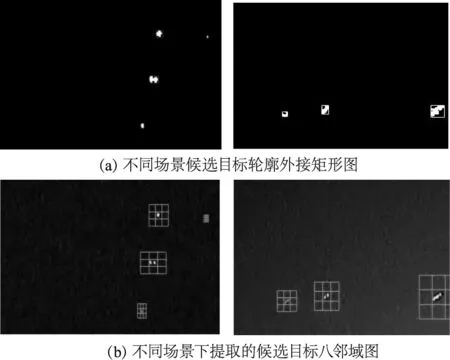
图3 提取目标尺寸和八邻域滤波区域Fig.3 Extraction of target size and eight neighborhood filtering region
新型Top-hat滤波同样基于形态学开、闭运算,其具体定义为:
f■Boi(x,y)=(f⊕ΔB)⊙Bb
(6)
f□Boi(x,y)=(f⊙ΔB)⊕Bb
(7)
其中,Boi(x,y)表示f■Boi(x,y),f□Boi(x,y)中使用的与Bi和Bo有关结构元素。Bi和Bo分别为两个扁平结构元,它们原点相同且Bo的半径大于Bi的半径,ΔB=Bo-Bb是介于Bo和Bi之间的扁平结构元,可用来调节参与运算区域目标的大小,Bo、Bi、ΔB和Bb之间的关系如图4所示。
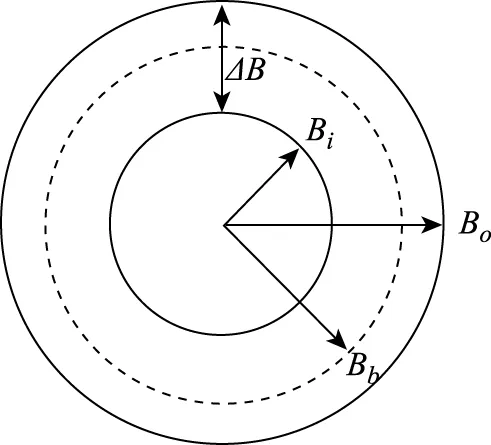
图4 新型 Top-hat变换结构元素之间的关系图Fig.4 The relational graph between structural element of new Top-hat
新型Top-hat中黑帽和白帽被定义为:
NWTH(x,y)=f(x,y)-min(f■Boi(x,y)),f(x,y))
(8)
NBTH(x,y)=max(f□Boi(x,y),f(x,y))-f(x,y)
(9)
新型Top-hat采用边缘结构元素ΔB来区分目标所在区域与目标周围区域的差异,当目标的的半径小于Bi的半径,比目标大的背景被消除,目标被保留,反之目标被消除,比目标小的背景被保留,因此结构元大小的选取对滤波效果的好坏起着重要的作用。
4 全局自适应形态学滤波
针对简单场景下的红外小目标,通过感兴趣区宇提取了目标尺度后,对滤波区域进行局部自适应滤波后,实现了红外小目标的检测,如图5(b)所示。而对于复杂场景,当完成局部自适应滤波后,依然有较多的边缘角点噪声保留,达不到滤波的预期效果,如图5(e)所示。所以本文分别对简单场景和复杂场景进行研究,当为简单场景时,对图像采用局部自适应滤波,在保证目标检测的同时,加快了检测速度;而当为复杂场景时,自适应局部滤波虽然在一定程度上能减少计算时间,但对于有连续边缘及角点的杂波干扰,该方法不达不到预期效果。
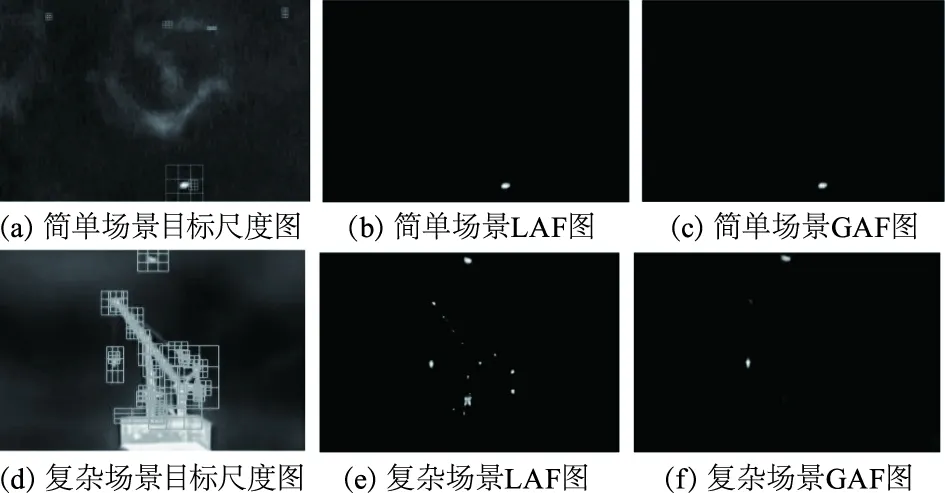
图5 不同场景LAF和GAF效果图Fig.5 LAF and GAF effect diagrams in different scenarios
针对复杂场景中角点噪声较多且具有连续性,而检测红外目标属于孤立区域,在区域附近存在噪声区域较少,结合局部邻域特征统计思想,对图像S中每个感兴趣区域的邻域进行区域个数统计,若个数较多,则该区域为噪声区域,若区域较少,则该区域为目标区域。通过确定的目标区域选择尺度最大的区域,进行自适应Top_hat滤波,抑制目标区域孤立噪点,实现目标检测。通过两种滤波思想的结合,在实现准确的目标检测的同时,保证了检测实时性的要求。
如图6定义为区域A的大小为d的邻域和连通域数目阈值N,若在邻域内有连通域数量大于N,则该区域不是目标区域,若在该区域的目标区域个数小于N,则该区域为目标区域,如果找不到目标区域,缩小邻域大小d,直到找到符合的目标区域。如图7所示,灰色方框内有超过连通域个数阈值N的连通域个数,则该区域为杂波区域,白色方框内连通域个数小于连通域个数,则该区域为目标区域。确定目标区域后,提取每个目标区域的尺度,利用目标尺度中的最大尺度作为全局滤波结构元大小,可大致确定红外小目标尺寸,然后进行自适应全局形态学滤波,实现红外小目标检测。
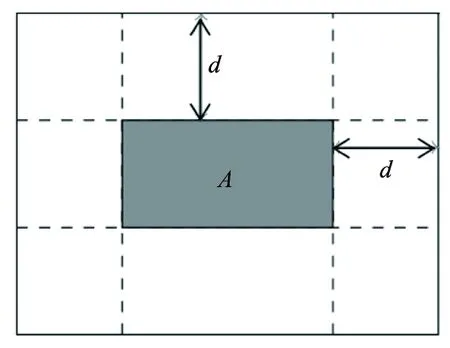
图6 大小为d的区域邻域Fig.6 A region neighborhood of sized

图7 寻找目标区域Fig.7 Find the target area
5 实验结果及分析
对于不同场景的红外小目标图像,基于自适应形态学滤波的红外小目标检测算法[11]求目标显著图的方法达不到检测实时性要求,并且对于复杂场景小目标产生的为目标较多,图图像信噪比较低,目标检测结果准确性低,如图8所示。为了对简单场景和复杂场景的红外小目标进行定量分析,对形态学滤波后的图像的信噪比(SCR)进行计算:
(11)
其中,uT为目标矩形区域像素值均值;uB,σB分别为背景区域均值和方差。

图8 不同场景LAF和GAF对比图Fig.8 Comparison of LAF and GAF in different scenes
本实验基于硬件平台基于1.00 GHz Intel Core i5 CPU 16GB RAM 计算机;软件平台基于Window10操作系统和MATLAB R2016a。实验采取在不同复杂场景下300×200个像素的红外图像视频序列,利用前30帧的序列的信噪比的平均值作为滤波信噪比的结果,并且以前30帧运行时间平均值作为算法运行时间。由表1可以看到,对复杂场景进行形态学滤波后都能起到抑制杂波的作用,但自适应全局滤波对杂波的抑制效果要好于自适应局部滤波。由表2可知,在检测率中,本文提出的GAF算法表现最好,检测率最高,虚警率较低。由表3分析可知,对复杂场景的形态学滤波效率,自适应全局形态学滤运行效率要明显高于自适应局部形态学滤波,且所在场景不同自适应局部的运行时间变化很大,不能很好的把控运行时间,而自适应全局滤波效率稳定,满足实时性要求。所以本文算法对不同复杂场景保持很好的滤波效果,实现对红外小目标的检测。

表1 不同复杂场景各算法信噪比结果Tab.1 SNR results of adaptive local filtering and global filtering in different scenes

表2 不同复杂场景各算法检测率(FR)和虚警率(FAR)对比Tab.2 Comparison of detection rate(FR)and false alarm rate(FAR)of algorithms in different complex scenes

表3 不同复杂场景各算法运行时间Tab.3 Running time of adaptive local filtering and global filtering in different complex scenarios
6 结 论
本文以频域显著性分析作为快速预处理步骤,获得抑制背景的重构结果。引入自适应阈值对重构图进行分割提取感兴趣区域,在缩减处理面积的同时获取目标参考尺寸,最终以全局自适应形态学滤波实现了红外小目标的准确检测。本方法对复杂场景图像适应性好,算法运行效率高,对背景杂波具有连续性的边缘特性实现了高效鉴别,同时保证了目标的召回率。