基于激光点云数据的三维运动图像重构技术
2022-11-12廖奕德
沈 明,廖奕德
(广东工业大学华立学院通识教育部,广东 广州 511325)
1 引 言
激光点云数据广泛应用于激光成像雷达信息处理、非曲面目标检测、三维立体摄影等领域[1-2]。在激光成像过程中,由于视点、遮挡等因素的影响,三维运动图像数据是不完整的。因此,为了获得更完整的三维运动图像点云数据,通常需要进行多个广角目标测量,并收集各个角度的激光点云数据,并将其拼接后统一到同一空间坐标系中,得到三维运动图像点云图。综上分析可知,将该技术应用于三维运动图像重构过程中,可以有效提高重构质量。
曾雯[3]等利用形态筛处理图像、场景参数预估、拆分和纹理映射对复杂景观三维场景进行重构,该方法没有对点云数据进行去噪,导致数据中存在异常值,表明该方法在重构时有效性差,存在重构测量距离与实际距离误差大的问题。王刚[4]等通过将虚拟现实技术和VRGIS理论技术相结合,构造出室内景观图,实现室内景观重构,该方法在建立数学模型时没有降低点云数据中的噪声,导致数据粗差点过多,检测点云数据数量大。罗寒[5]等提出融合激光扫描和多视图影像的室内物体三维重构技术方法,该方法按照以往工程案例,基于分块建模方法实现室内物体场景重构,但是该方法没有解决激光点云数据中存在噪声的问题,导致数据出现异常,检测清晰度低。
为了解决上述方法中存在的问题,提出基于激光点云数据的三维运动图像重构技术。考虑到运动图像在重构过程中,利用三维激光扫描仪会获取三维运动图像的激光点云数据,因此首先对其进行预处理,包括帧间配准、数据集去噪,然后利用曲面重构法对三维运动图像进行拟合重构,实现三维运动图像重构,并通过实验验证了重构效果。
2 激光点云数据预处理
2.1 配准多帧激光点云数据
为了从三维激光扫描仪的运动图像重构过程中的原始数据,采用迭代最近点算法(Iterative Closest Point,ICP)采集和配准图像重构中的激光点云数据,在数据配准的过程中,ICP算法只能统一当前数据坐标中心,为了解决这一缺陷,需要在数据配准时和多帧激光点云数据建立相应关系。
(1)假设含激光点云数据集N层,每层激光点云数据集具有M帧,则三维运动图像的每层激光点云数据集表示为:
式中,N表示三维运动图像采集层数;M表示三维运动图像每层帧数。


(1)
式中,R表示旋转矩阵;t表示平移矩阵。

(2)
上述过程为寻找与当前点对应的最邻近点,式中,ck(i)表示三维运动图像邻近点的最小误差,在此基础上计算新的变换矩阵,定义如下。
(3)
(5)将第K步的变换更新为:Rk=R*Rk-1,tk=t*tk-1。
防错系统所需硬件均需适应流水线的生产,因此需根据装配流水线的特点选择合适的硬件,所有硬件均不能与现有流水线的硬件发生干涉。



2.2 激光点云数据集去噪
采用RANSAC随机抽样一致性算法选取原始激光点云数据中的有效数据[9],从中获取有效模型,并消除粗差点或异常值,结合激光点云数据平面拟合方法对激光点云数据进行去噪,具体步骤如下所示:
(2)通过下述公式:
(4)
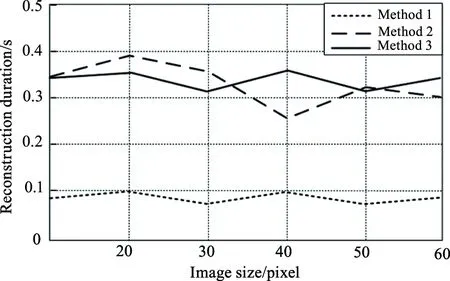
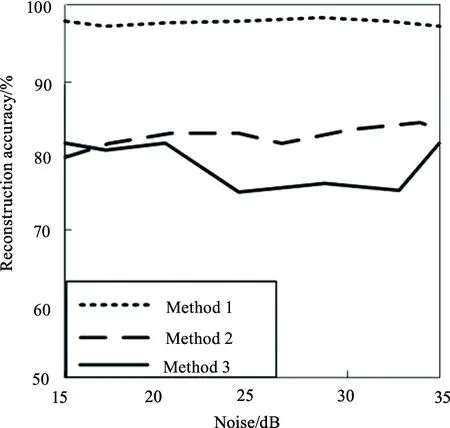
(3)选取一个阈值t,对di与t之间的关系进行判断,若di>t,则为异常点;若di (4)重复以上步骤,经过n次迭代后选择最多一组的有效点点集,采用特征值法对这组点集进行平面拟合[10-11],计算出a,b,c参数,最终得到初始平面模型。 (5)通过(4)对点到平面的距离di进行计算。 (6)对距离di的标准偏差σ进行计算,用公式表达式定义如下: (5) (7)对di与σ之间的关系进行判断,当di>2σ时,属于粗差点,将之删除;当di<2σ时,属于有效点,将之保留。 (8)剩下多余的点就采用特征值法重新对a,b,c进行计算。 (9)将步骤(5)~(8)重复,当所有多余的点全部都在规定阈值内时,即di<2σ,这时粗差点已经完全消除,实现对激光点云数据的去噪。 通过对上述激光点云数据预处理后,采用曲面重构法[12]构建三维运动图像模型。三维模型构建中最重要、最复杂的一部分就是曲面重构,利用适当的数学算法对分散的点云进行拟合,最终拟合成与真实物体相似形状的模型。本文拟采用NURBS曲面重构法构建三维运动图像模型。 K×L次的NURBS曲面定义为: (6) (7) 式(6)中,Vi,j表示控制顶点,一般表现为拓扑矩阵阵列;Wi,j表示权因子;Bi,k(u)与Bj,l(w)分别表示从u到k次和从w到l次的B样条基函数。公式(7)中,U和W则用u向和w向的节点矢量来描述。在曲面公式中NURBS公式表示一张曲面,但需要确认以下数据:Vi,j控制顶点、Wi,j(i=0,1,…,n;j=0,1,…,m)权因子、参数v的次数l和参数u的次数k,u向与w向的U、W节点矢量。 在此基础上,本文采用插值法实现三维运动图像曲面点云拟合,首先设置三维运动图像曲面点云数据数量,然后通过最小二乘法实现曲面点云拟合,并从中获取最短距离,最后判断误差情况。如果误差小于最长距离,就继续在曲面中添加数目,并重新拟合曲面,直至误差处于允许值范围内,最终形成三维运动图像重构模型,如图1所示。 图1 三维运动图像重构模型建模过程Fig.1 3D moving image reconstruction modeling process 上述过程在理论上完成基于激光点云数据的三维运动图像重构技术的研究,在此基础上,通过实验,验证设计方法在实际中的应用效果。其实验平台为:Trane Split Koolman机组,型号为CGAK0605C。实验选取如图2所示的篮球运动图像的点云数据作为实验对象,其中包含了20369个数据点。分别采用基于激光点云数据的三维运动图像重构技术(方法1)、基于微波光子的三维运动图像重构技术(方法2)和基于虚拟现实的三维运动图像重构技术(方法3)对上述模型进行重构实验,对比重构效果以分析评估重构性能。 选择三种图像重构方法进行对比测试,检测结果如图2所示。从图2可知,此次方法重构后,方法1的测量图像要优于方法2和方法3,与实际图像基本一致,因为方法1降低了噪声对激光点云数据的影响,避免了数据异常的问题,使其在获取图像时更加精准,进而提高了图像清晰度。 图2 测量图像与实际图像清晰度对比Fig.2 Comparison of measured image and actual image sharpness 选择五组三维运动图像重构技术激光点云数据测量结果,对三种方法中的激光点云数据进行对比,激光点云数据越小,说明重构技术越高,具体测试如表1所示。 表1 激光点云数据数量对比Tab.1 Comparison of point cloud data quantity 由表1可知,在这五组测量结果中,方法1的激光点云数据数量最少,而方法3的激光点云数据数量最多,说明方法1的三维运动图像重构技术高,因为方法1采用平面拟合方法减弱了激光点云数据中的噪声,消除了激光点云数据中的粗差点,降低了激光点云数据的数量,增强了方法1三维运动图像重构技术的实用性。 根据方法1、方法2和方法3的三维运动图像重构测量距离与实际距离进行对比,由图3可知,方法1的测量距离要低于方法2和方法3,与实际值的轨迹相近,因为方法1利用平面拟合方法对激光点云数据进行去噪,解决了激光点云数据中存在异常值的问题,使三维运动图像重构技术更加有效,提高了图像重构技术的精准度。 图3 测量距离与实际距离对比Fig.3 Comparison between measured distance and actual distance 为进一步验证所研究方法的重构性能,在测试重构效果的基础上测试本文方法与两种对比方法的重构时长,得到重构时长对比结果如图4所示。 图4 重构时长对比结果Fig.4 Comparison results of reconstruction time 从图4中可以看出,与两种对比方法相比,本文方法在保证重构效果较好的前提下,重构时间相较于方法2和方法3更短,时间最高为0.1 s,这是由于所研究重构方法预处理了激光点云数据,在提高重构方法的质量的同时减少了重构时间。 统计采用三种方法在不同含量噪声图像中重构效果,对比结果如图5所示。 图5 重构准确率对比Fig.5 Comparison of reconstruction accuracy 图5实验结果可以看出,本文方法15~35 dB的噪声图像的重构准确率在95 %以上,采用两种对比方法的重构准确率均低于85 %。本文方法对噪声图像的重构准确率明显高于方法2和方法3,说明采用本文方法重构后的三维运动图像具有较高的清晰度,可令图像具有较高的去噪效果。 目前,三维运动图像重构技术已走在多学科交叉研究领域的前端,但传统的图像重构技术仍具有很大的约束性,为了保证三维运动图像重构技术能够得到有效使用,提出基于激光点云数据的三维运动图像重构技术。经调查发现,传统三维运动图像重构技术存在测量距离与实际距离相差大、激光点云数据数量多和测量图像与实际图像清晰度对比低等问题。针对上述问题,提出基于激光点云数据的三维运动图像重构技术,通过对激光点云数据的采集,获取激光点云数据坐标中心,再利用平面拟合方法对激光点云数据进行去噪,采用曲面重构法实现曲面模型拟合,完成对三维运动图像的重构,提高了图像重构技术的有效性及实用性,解决了传统方法中存在的问题,为今后三维运动图像重构技术奠定了重要基础。3 构建三维运动图像重构模型

4 实验与分析
4.1 重构效果对比

4.2 激光点云数据数量对比

4.3 重合率对比

4.4 重构时间对比
4.5 重构准确率对比
5 结束语