载人潜水器浮标收放绞车设计
2022-11-11姚晨佼罗升
姚晨佼,罗升
(中国船舶科学研究中心 深海技术科学太湖实验室,江苏 无锡,214082)
0 引言
深潜、深钻及深网是目前探索深海奥秘的重要手段,而载人潜水器是深潜探索的主要手段之一。现如今,美国、法国、日本的载人潜水器以及我国的“蛟龙”号、“深海勇士”号及“奋斗者”号均已进入深海进行科学考察[1-2]。目前,我国载人潜水器在深海中的定位以及与岸基之间的通信主要依赖于水面母船,但随着水下作业能力的加强,载人潜水器需具备更强的自主能力,而不必局限于母船的支持。因此,为实现载人潜水器在水下自主长时间作业时的高精度定位,以及与外界的信息交互,国内外相继研发了多种多功能浮标装备,其中有缆中继浮标数据传输可靠,可实时传输,并可多次释放回收利用[3],但有缆中继浮标需通过水下浮标绞车进行控制收放[4],因此,研制水下浮标绞车是实现有缆中继浮标多次成功释放和回收利用的重要保证。
目前,国外水下绞车已演化出多种系列,包括日本NKG OCEAN 公司的ASE 系列水下绞车,美国InterOcean System 公司的VPS 系列水下绞车,以及全球海洋公司的水下绞车[5]。国内则仍处于发展阶段,产品主要有中国船舶集团有限公司第710 研究所设计的可控制通信浮标升降的水下绞车[6],以及无人值守的实时传输潜标水下绞车[7]。2019 年,研究人员搭载青岛海洋科学与技术试点国家实验室“问海计划”航次,在南海成功完成了基于水下绞车的水下实时观测系统功能验证试验,包括水下绞车水下运行测试和水下通信电缆数据传输链路测试[8]。水下绞车通常应用在潜标等海洋环境监测中,通过锚系固定在特定位置,数据传输的时效性差。其控制系统一般为外置式,通过水密电缆与执行机构连接,根据预制的程序进行绞车控制[9]。载人潜水器浮标绞车通过缆绳可进行信息实时传输,执行机构与缆绳通常先与绞车配置的水下电子罐连接,电子罐通过传输总线与载人舱中的控制台相连,通过舱内上位机对绞车进行智能控制。我国在水下绞车的研制上虽取得了一定成果,但目前由于载人潜水器水下作业时间较短,用于载人潜水器的浮标绞车研制较少,因此,文中针对未来深海长时间科研考察的大型作业型载人潜水器有缆中继浮标的定位及通信需求,提出了一种用于释放及回收中继浮标的水下浮标收放绞车的技术方案,为实现载人潜水器深海长时间作业时高精度定位及远距离通信提供保证。
1 原理、主要参数及结构组成
1.1 原理和工作过程
浮标主要通过搭载于载人潜水器上的浮标绞车来进行多次释放或回收,图1 为其工作示意图。根据浮标收放要求,浮标绞车应具有主动放缆功能、被动放缆功能、自动有序排缆功能、主动回收缆功能、应急切缆、浮标锁紧功能及缆长缆速检测显示功能。浮标绞车安装于载人潜水器作业舱中,承担着浮标的收放工作,同时具有输送动力和传输信号的功能。
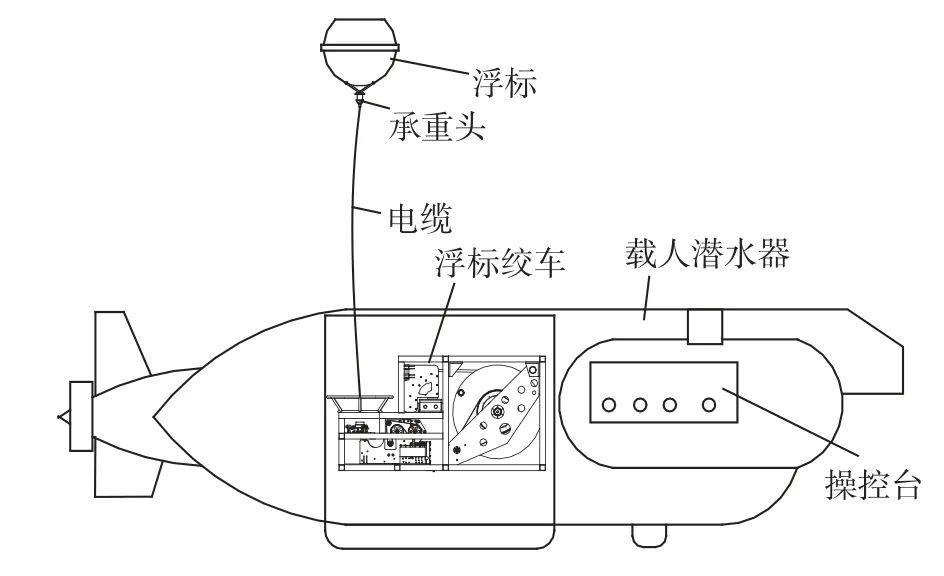
图1 浮标绞车工作示意图Fig.1 Working diagram of buoy winch
载人潜水器水下长时间作业对通信和导航定位均有需求。操作人员可在载人舱内操控台控制浮标绞车释放锁紧机构并控制绞车卷筒放缆,从而释放有缆中继浮标,由绞车控制浮标到达指定高度后,打开浮标上搭载的通信设备,执行通信任务。各通信设备的数据经电缆实时传递至载人潜水器本体,并在显控系统显示。回收浮标时,操控台控制绞车卷筒反向转动收缆,排缆机构左右摆动可实现电缆的有序排缆;浮标进入导向基座后,控制锁紧机构可锁紧浮标,从而实现浮标的回收。浮标搭载的设备经由电缆供电,并接受控制指令。
1.2 参数及结构组成
有缆中继浮标主体为球形浮力材料,在浮力材料上安装有声学多普勒流速剖面仪(acoustic Doppler current profiler,ADCP)、多参数水质仪等水下传感器及通信设备,在浮力材料的内部安装有耐压电子舱。浮标尺寸为Ф1100 mm×1050 mm,浮力约4000 N。电缆主要用于连接绞车和浮标以实现水下收放,并进行信号传输;电缆为中性浮力缆,直径为20 mm,弯曲半径为300 mm,长度约为1800 m,绞车收放速度为0~0.5 m/s。浮标回收状态下,通过下方承重头与绞车锁紧固定。
浮标绞车主要由卷筒组件、排缆机构、导向机构、锁紧机构、剪切机构、液压阀箱及电子罐等部件组成(见图2)。浮标电缆预先有序缠绕在卷筒上,排缆机构左右摆动可实现电缆的有序排缆,浮标通过承重头锁紧固定安放在导向基座中。
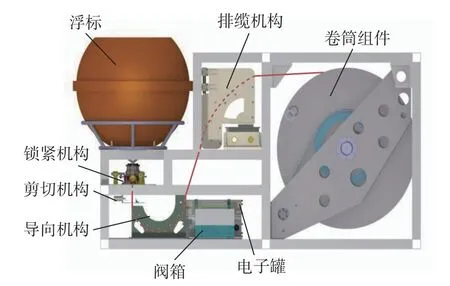
图2 浮标绞车组成示意图Fig.2 Diagram of buoy winch composition
2 设计和分析
2.1 卷筒布置及绞车动力计算
卷筒组件示意图如图3 所示。电缆预先有序缠绕在浮标绞车的卷筒上,浮标通过卷筒一端安装的光电滑环进行与载人舱的光电信号传输,另一端则安装测速传感器,用于测量电缆释放的长度或速度,控制浮标释放的高度。驱动马达与卷筒安装在同一侧板上,通过链传动驱动卷筒转动。由于绞车的工作环境在水下,卷筒材料可以选择不锈钢。
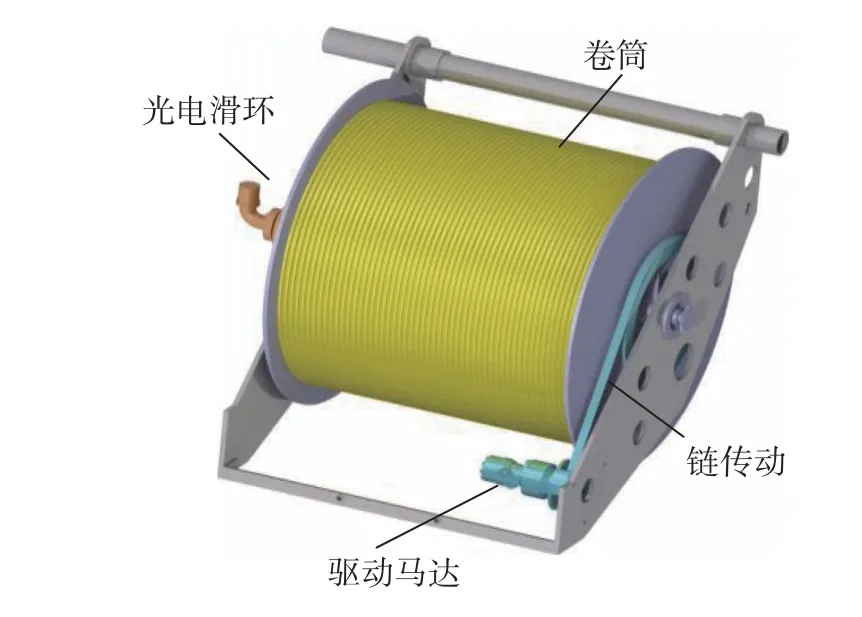
图3 卷筒组件Fig.3 Drum mechanism
根据电缆弯曲半径300 mm,设计浮标绞车卷筒底径D0=600 mm,卷筒有效缠缆部分长度L=1100 mm,则第n层缆可卷绕的圈数

式中:Δ为同一层相邻2 圈声阵电缆之间的横向间隙,Δ=0.3 mm;d为电缆直径,d=20 mm。对z的计算结果取整,即z=54。
卷筒电缆按照三角形形式排列,如图4 所示,则第n层缆的卷绕直径为
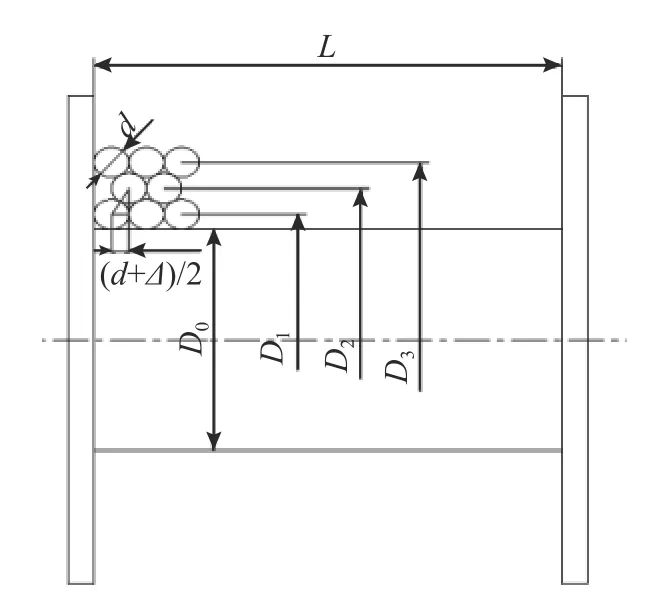
图4 电缆排列示意图Fig.4 Diagram of cable arrangement
式中,n为缆层数,则电缆第n层容绳长度为

卷筒上的容缆长度为L,当n=13 时

此时卷筒容缆量满足使用要求,表层直径D13=1034 mm。
浮标绞车要求在速度为2 kn 的垂直海流下可以正常回收浮标,由于浮标浮力为4000 N,电缆为中性浮力缆,因此缆上拉力为

式中:F浮=4000 N;F阻=1/2ρv2SCd[10],其中,海水密度ρ=1.027×103kg/m3,浮标迎流面积S=0.95 m2,Cd为阻力系数,由于浮标为球形,取0.5,v为电缆回收时相对海流速度1.525 m/s。由此可得F阻=567 N,则拉力F=4567 N。
马达驱动设计链传动比i=z2/z1=57/17,z2和z1为链轮齿数,则卷筒最大工作扭矩

驱动马达输出扭矩

式中,η机为机械传动总效率,取0.85。
马达压力
式中:马达排量V排=375 ml/r;马达机械效率ηmh=0.85。考虑各阀组的压力损失,取p=17 MPa。
则马达流量

式中:卷筒转速n=9.3 r/min;马达容积效率ηmv=0.95。
2.2 排缆机构设计
排缆机构的作用主要是保证浮标回收时,电缆能被有序缠绕在卷筒上,实现浮标多次释放及回收。浮标绞车采用摆动式丝杠排缆结构,导缆机构一端与摆动支座相连,导缆机构中间安装有与其相对滑动的滑块,通过转轴与排缆滑块相连,排缆马达驱动丝杠转动,带动排缆滑块在丝杠上移动,从而带动导缆机构绕摆动支座固定轴做往复摆动,如图5 所示。该排缆方式可保证电缆出缆口固定,电缆出缆方向始终垂直向下。

图5 排缆机构Fig.5 Mechanism of cable arrangement
2.3 导缆机构及剪切机构
导缆机构安装于排缆机构出缆口下方,用于缆绳导向,主要由滚轮和支撑架组成(见图6)。

图6 导缆机构Fig.6 Guide mechanism
应急切缆机构的主要作用是在紧急情况下切断电缆,该机构主要由支架、切缆油缸、切刀等部件组成(见图7),安装在锁紧机构下方,可通过操作油缸伸出切刀及时切断电缆。
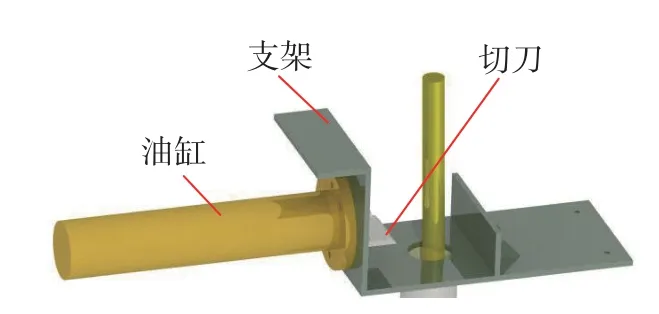
图7 切缆机构Fig.7 Cable cutter
2.4 锁紧机构设计
浮标末端安装有承重头,浮标在回收状态下,浮标绞车通过锁紧机构锁紧承重头将浮标固定。锁紧机构主要由壳体基座、3 组承重块及导向杆、转动盘及油缸等组成,如图8 所示。承重块主要用于限定承重头位置并承受浮标浮力,油缸伸缩带动连杆机构可驱动转动盘转动,3 组导向杆下均固连有限位柱,转动盘转动过程中,可带动限位柱在转动盘上的弧形槽中滑动,弧形槽两端距离转动盘中心具有位移差,从而使得导向杆前后移动,该位移差即为导向杆的行程。导向杆带动承重块前后移动,从而实现承重头的锁紧与释放。
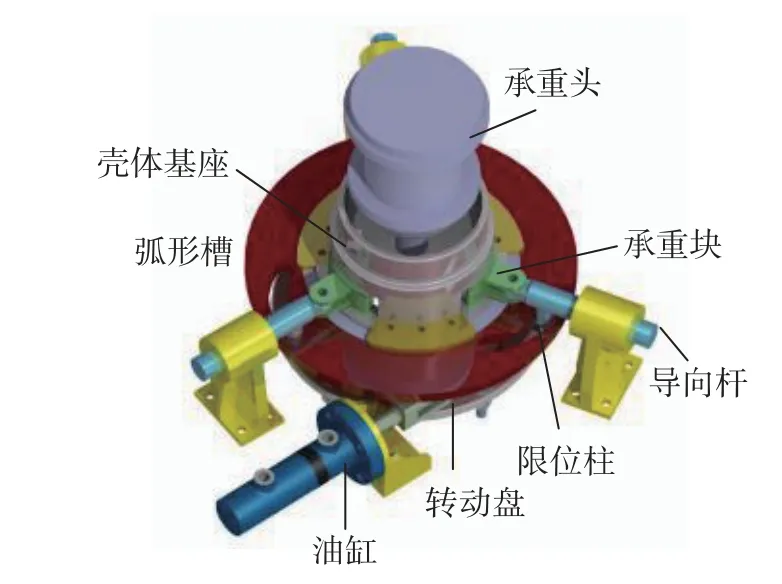
图8 锁紧机构Fig.8 Locking mechanism
当释放浮标时,首先启动浮标收放绞车将承重头向下拉伸一小段距离后,控制单元向液压单元发出电信号,油缸在压力油的作用下收缩,直至承重块被拉伸出来,转动盘无法转动且位置传感器发出电信号,绞车即可释放电缆。在浮标的拉力下,承重头将完全脱离锁紧机构,从而实现浮标的释放。当回收浮标时,浮标绞车首先回收电缆,承重头进入锁紧机构壳体基座,绞车继续回收电缆,当承重头下降至极限位置时,竖直方向上安装的位置传感器发出电信号,传送到控制单元,绞车停止回收电缆,同时驱动油缸伸出,直至承重块完全收缩进壳体基座内,承重头最终停靠在承重块上,对其进行限位,从而限制浮标被拉出。
2.5 液压控制系统设计
浮标绞车采用水下液压阀箱,阀体采用铝合金材料,表面硬质氧化处理,并将油液充满阀箱内部,使用压力补偿器保证箱体内压力与外界海水压力始终保持一定范围内的压差,这样可以解决深海工作时阀箱的耐压和密封问题。阀块选用螺纹插装式阀组,各液压阀采用叠加式阀组,将阀芯集成在一起,可以使阀组结构更紧凑从而减少管路连接。绞车液压系统原理如图9 所示,该系统主要由卷筒控制回路、排缆马达回路及锁紧油缸回路组成。比例换向阀SV1 兼具电磁换向阀和比例调速阀的功能,用于无级调节卷筒驱动马达的收/放缆速度,其中位机能为Y 型,用于被动放缆时向低压腔补油以防止吸空,以及将油箱的补偿压力传递到马达两腔,以平衡马达内外压力。溢流阀TS1 用于收缆时张力保护,当马达两腔压力差达到设定值,即卷筒上的负载扭矩超过一定值时,溢流阀开启,卷筒堵转,防止电缆所受张力持续增大导致电缆断裂。平衡阀CBV1 用于放缆过程中的被动放缆等超越工况,防止马达失控。电磁阀SV2 用于卷筒驱动马达的制动,从而实现对卷筒的制动。排缆马达通过SV4 电磁比例换向阀按照与卷筒转速一定的比例控制丝杠转速和换向,实现电缆的有序释放或回收。锁紧油缸通过SV5 换向阀控制油缸的伸缩,带动承重块的移动实现浮标锁紧或释放,当油缸到位后换向至中位,由液压锁保持油缸状态。
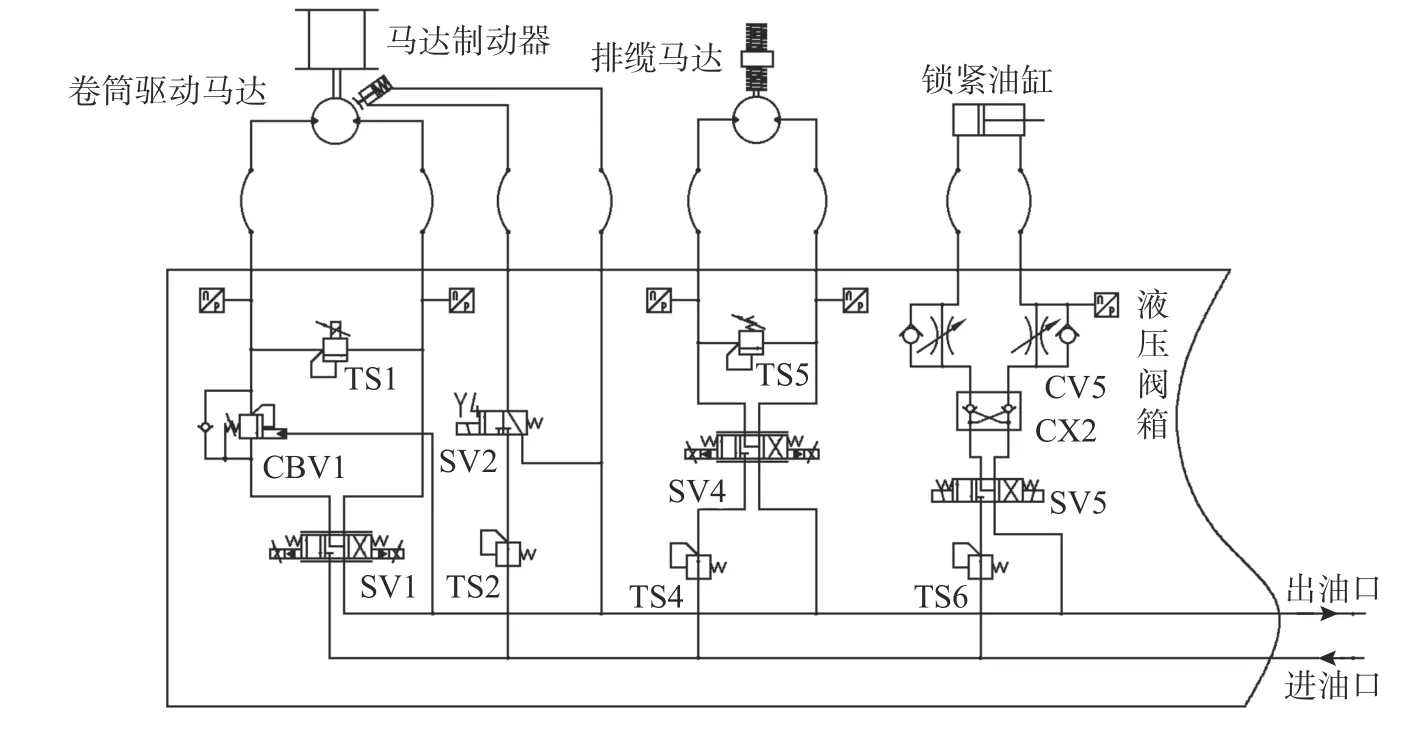
图9 液压系统原理图Fig.9 Schematic diagram of hydraulic system
2.6 控制系统设计
结合载人潜水器舱内控制的工作特点,根据浮标绞车的功能需求,其控制系统架构如图10 所示,主要包括监控主机、小型工业交换机、控制器(含电源板、主控板以及扩展板)、罐载安全传感器(包括温度、湿度和漏水传感器)、摄像机以及相关的传感器和执行器件。监控主机用于系统的状态显示和操控输入,舱内计算机通过以太网与电子罐内设备进行双向通信。硬盘录像机(digital video recorder,DVR)用于视频信息的存储,视频服务器可将模拟视频信号转为网络信号。电子罐用于提供控制系统中可集中布置的空间,采用耐压结构设计。控制器主要实现装置的速度、油压和限位保护等功能;控制器由电源板、主控板和扩展板组成,主控板用于装置的数据分析和控制计算,扩展板通过DI(数字量输入),DO(数字量输出),AI(模拟量输入),AO(模拟量输出)以及串口等与传感器和执行设备连接。工业交换机用于实现网络数据交换。
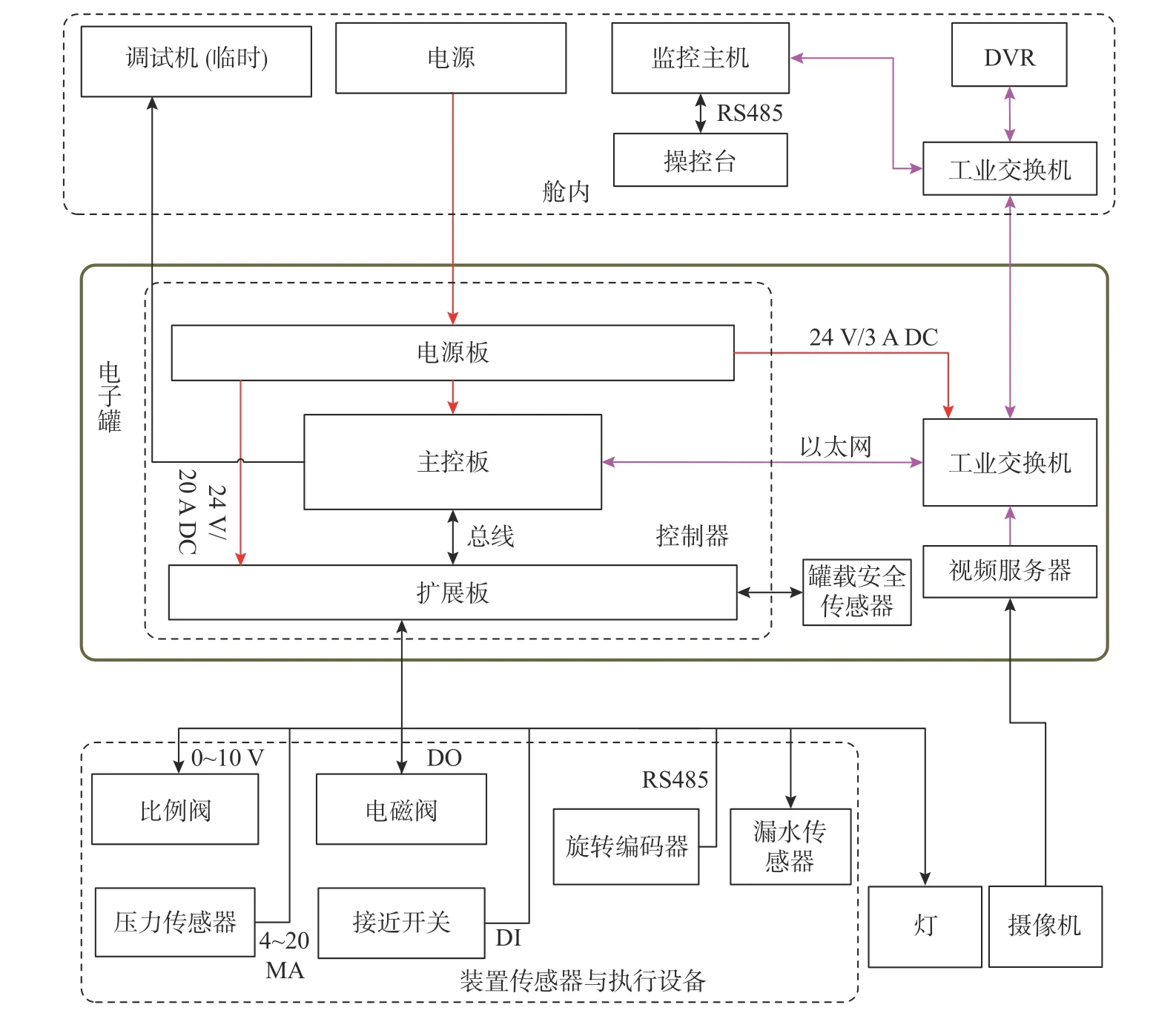
图10 控制系统Fig.10 Control system
3 结束语
水下浮标收放绞车功能完整,搭载于载人潜水器,可实现有缆中继浮标的多次释放及回收利用,从而实现数据的实时传输,为载人潜水器深海长时间作业所要求的高精度定位及远距离通信提供了保障,具有重要的应用价值。由于绞车需在水下长时间执行多次收放缆工作,同时绞车为自动化智能控制,人为无法直接干预,因此绞车的可靠性非常重要,后期应对绞车进行长时间收放缆可靠性试验,同时在试验中获取绞车的排缆误差数据,通过控制卷筒及排缆马达减小误差的积累,提高绞车的可靠性。
