某型航母的耐波性与阻力性能计算
2022-11-10张大朋严谨赵博文
张大朋,严谨,赵博文
(1.广东海洋大学 船舶与海运学院,广东 湛江 524088;2.浙江大学 海洋学院,浙江 舟山 316021)
0 引言
航空母舰,是一种以舰载机为主要作战武器并作为其海上活动基地的大型水面舰艇[1]。由于航母的水下面积较大,强烈的波浪及环境载荷将对航母的运动姿态将造成显著影响,而舰载机起降的安全性和稳定性对航母的运动姿态的依赖极高[2,3]。
当前,国内外对舰船气流场的预报进行了大量的试验及数值模拟工作。在国外,Polsky等[4,5]对舰船气流场进行了大量的研究工作。Rajagopalan等[6]在NASA陆军研究中心的风洞中进行了两栖攻击舰的空气尾流测试,研究了V-22倾斜旋翼机舰载的空气动力学相互作用。Syms[7]使用格子-玻尔兹曼法计算了轻型护卫舰的气流场并获得了准确的气流场特征。Forreste等[8]计算了两种不同型号护卫舰的气流场并与试验数据进行了对比。Kulkarni等[9]使用标准k-ε模型进行了护卫舰烟囱气流场的参数研究。在国内,中国舰船研究中心的姜治芳等[10-13]在该方面进行了大量的研究工作,取得了大量的成果,包括上层建筑的布局和飞行甲板的形式对气流场的影响等。郜冶等[14]研究了不同风向下航母甲板的涡结构特征,分析了影响船后涡旋强度的和位置的因素。赵维义[15]研究了直升机旋翼诱导流与舰船空气尾流叠加后形成的复合流场。
综合国内外研究可以看出,当前运用Computational Fluid Dynamics(CFD)技术计算航母水上结构的气动流场已经较为普遍。但对于航母来说,其水下部分的耐波性与阻力性能计算国内的相关研究较少。有鉴于此,本文对某型航母的耐波性与阻力性能进行了计算,得到了一些有价值的结论,对于指导具体海上航母运行实践有一定的指导意义。
1 基本理论
1.1 耐波性计算理论
船舶的垂荡、纵摇和横摇运动本质上都是振荡的,这是由于这些运动中均包含由浮力变化产生的恢复力。船舶在波浪作用下的运动可视为阻尼-弹簧-质量系统。垂荡和纵摇的耦合运动中,垂荡方程为:

纵摇方程为:

式中,M为船体质量,I为惯性矩,A为附加质量系数,B为阻尼系数,C为静水恢复力系数,η为平移值/角度值,F为波激力/力矩。下角标的3代表垂荡运动,5代表纵摇运动。实际上,1、2、3分别代表x、y、z轴上的纵荡、横荡和垂荡;4、5、6分别代表x、y、z轴上的横摇、纵摇和艏摇垂荡。两个数字相连表示因第二个运动而产生的第一个运动的系数,例如,A33表示因垂荡产生的垂荡附加质量系数,B53表示垂荡引起的俯仰阻尼系数,依次类推。
为了求解上述方程,需要获得相关的系数、力和力矩。运动方程中的系数表达为:

式(3)至式(13)中,a33为截面附加质量,b33为截面阻尼,b为截面宽,g为重力加速度,U为船速,ωe为遭遇频率,ζ与LCB的纵向距离。
船舶的波浪激振力和力矩是当船舶振荡被约束并出现入射波时所受的载荷。船舶的运动响应由波激力和力矩所引起。对于垂荡和俯仰耦合运动方程的解,只需要整体力和力矩;为了求解波浪引起的剪力和弯矩,这些力被划分为截面的Froude-Krilov力和绕射力。任意波向的波激力和力矩由下式给出:

式中,f3为截面的Froude-Krilov力,h3为截面的绕射力。
Froude-Krilov力由下式给出:

速度势由下式给出:

常见的波浪增阻计算方法有3种,分别是Gerritsma&Beukelman法、Salvesen法和Havelock法。
Gerritsma&Beukelman法所描述的波浪增阻与船舶的相对垂直速度有关,计算式为:式中,=b33-Uda33/d,为修正截面阻尼。是相对垂直速度,由下式给出:


式中,为局部相对波幅。Gerritsma&BeukelmanⅠ中=-ωζ*;Gerritsma&BeukelmanⅡ中=-。
Salvesen法的波浪增阻计算式为:

其中,和R7的计算过程:
Havelock法中,波浪增阻计算式如下:

式中,ε是运动与相应激振力或力矩的相位差。
计算二维截面的水动力特性是切片理论的基础,常用的方法是保角映射法。保角映射法可将船舶截面映射到以原点为中心的单位圆,从而计算任意船舶截面的水动力系数。
映射方程的一般形式由式(24)中给出。

式中,l是位于单位圆上的复数。
1.2 阻力性能计算理论
航母属于大型排水型船舶,排水型船舶的阻力预测方法有Holtrop法、Compton法、Fung法、van Oortmerssen法、Serios 60法以及KR Barge法。其 中,Holtrop法适用于带有球鼻艏和方尾的船型,符合本航母的船型特征,因此,拟采用Holtrop法对航母的阻力进行计算。
Holtrop法的估算式如下:

式中,Rf为摩擦阻力,根据ITTC1957公式计算而得,1+k为形状因子,Rw为兴波阻力,Rb为球鼻艏引起的附加阻力,Rapp为附体阻力,Rtr为方尾引起的附加阻力,Ra艉船模与实船相关的修正因子。
Holtrop法给出了上式中每个参数的回归公式,综合回归公式可以总结出总阻力的一般函数表达式:

式中,L、B、T分别为船长、船宽、吃水;Δ为船舶的排水量;Cb、Cp、Cm分别为方形系数、棱形系数以及中横剖面系数;Lcb为船舶浮心纵向位置;ABT、hB分别为球鼻艏横向面积和球鼻艏横截面中心高度;AT为艉封板浸水面积;SApp为附体湿表面积。
自由液面的估算是采用细长体理论。细长体理论(SlenderBodyMethod)是一种通过计算细长船体兴起的远场波系自由液面的能量来求解兴波阻力的数值方法。应用细长体理论进行兴波阻力预测时需要假设:理想流体,无黏性,不可压缩,运动无旋;微幅波,不计表面张力;船体在自由液面上作稳定恒速运动。
细长体方法基于Michell提出的运用一阶线性方法的求解船舶兴波阻力的积分方程,即Michell积分:
式中,ρ为流体密度,g为重力加速度,ν为来流速度,m为常数,x、z为空间积分变量;I、J、λ为中间变量。
细长体方法将船体湿表面离散化为若干四边形面元,源汇布置在中纵剖面紧邻面元形心的位置上,在船体中纵剖面形成一个沿着船体中心线的源阵列。面元的源强为:

式中,为面元在中纵剖面上的投影面积,νx为来流速度在x方向的分量,dy/dx为面元形心处的水线斜率。式(31)在水线斜率趋向无穷大或面元投影面积趋向0时失效,对于方尾船,该式无法处理方尾处的源。因此,式(31)应用于方尾船尤其是高速方尾船时会出现较大的偏差,其应用范围受到限制。基于此,后人提出了更加灵活的面元源强表达式:

式中,ν为来流速度为面元形心处指向外侧的单位法向量,S0为面元面积。式(33)中不含dy/dx以及项,有效减轻了忽略方尾源强所带来的计算偏差。将兴波阻力用有限水深下源的Eggers远场系数来表示,可以得到源的兴波阻力计算式:
式中,km、θm以及ζm分别是第m个谐波的波数,波倾角和波高,B为水池宽度,H为水池深度。式(34)中,第m个谐波波高满足关系式zσ)处源强的自由液面波高项ξm、ηm为

式中,ξm和ηm分别为偶次谐波波高和奇次谐波波高,σσ为点(xσ,yσ,zσ)处的源强为基本波数,浅水时=g/v2,深水时=k0。谐波波数km和波倾角θm满足波速条件:

由于Michell积分是以流动为对称绕流、长宽比足够大为前提,因此,应用细长体方法的每个船体应关于各自的中纵剖面对称且均拥有足够大的长宽比,以保证足够的计算精度。
2 计算条件
依据以上原理可对某型航母的耐波性与阻力性能进行计算,某航母的具体参数见表1。
2.1 耐波性计算条件
本节计算3种航速,25 kn、30 kn和35 kn,浪向角为0~180°,间隔15°。不规则频谱选择JONSWAP谱,特征波高8 m。切片截面数为41,如图1所示。映射截面的设置是应用切片理论分析船体垂荡和纵摇运动的关键,因为切片理论的基础是计算二维映射截面的水动力特性。默认情况下,船体剖面被映射为Lewis截面,Lewis映射是根据截面的属性(主要是吃水、宽度和横截面积)来计算。这有一定的局限性,即对于非常宽(或深)且横截面积较低的截面,映射可能不准确,比如尾鳍、舵或龙骨的部分。对于此类截面,需要从测量的截面上移除尾鳍、舵或龙骨表面。可以认为,对于垂荡和纵摇的耦合运动,这类表面不太可能对结果产生重大影响。

图1 330m航母切片截面
横摇惯性半径为0.4倍的船宽、纵摇惯性半径和艏摇惯性半径为0.25倍的船长。海水密度为1025 kg/m3。
切片理论的方法中,选择Transomterms方艉修正、波浪增阻的计算方法选择Gerritsma&BeukelmanⅠ,波浪力的计算方法选择Arbitrarywaveheading。选择Transomterms能够对带有方艉的船舶进行修正,增加垂荡和纵摇阻尼的效果,从而降低船舶的最大响应。
2.2 阻力性能计算条件
航母的阻力计算参数如表1所示。
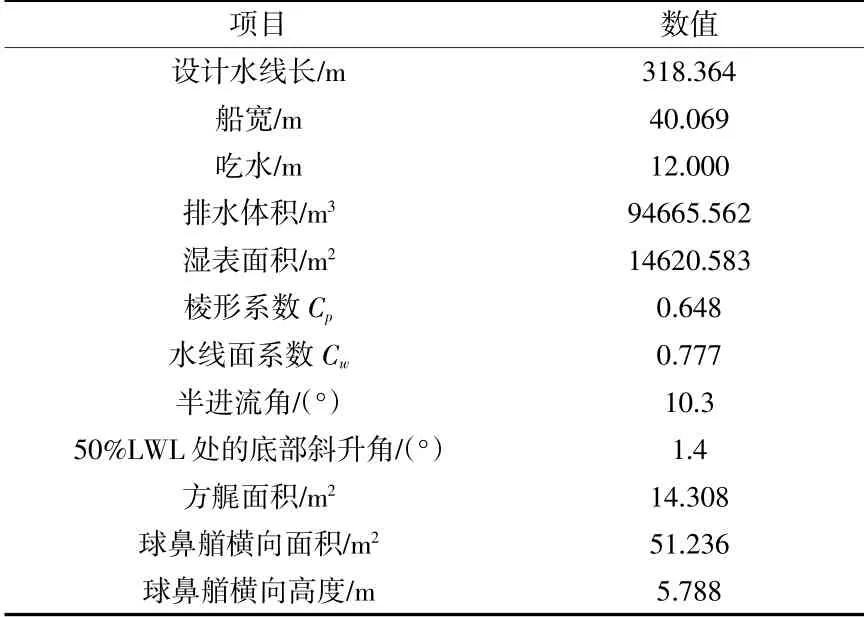
表1 航母的阻力计算参数
航速范围为0~35 kn,形状因子1+k设定为1.143,使用ITTC-1957经验公式计算摩擦阻力。
3 计算结果
3.1 耐波性计算结果
计算结果主要包括不同航速及浪向下的响应幅值算子(Response Amplitude Operator,RAO)和波浪增阻。RAO指每个频率、振幅为1的规则波流过船体,所引起的船舶某个自由度运动的幅值。3种航速下垂荡RAO随遭遇频率的变化曲线,如图2所示。

图2 不同航速及浪向下的垂荡响应幅值算子
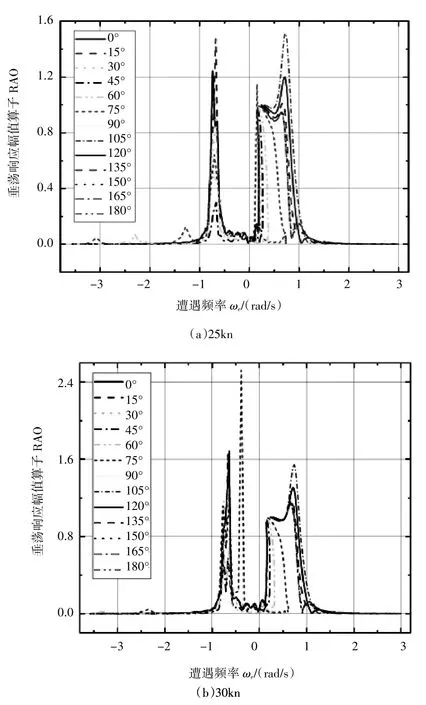
由图2可知,当航母顺浪航行(浪向角小于90°)时,垂荡RAO的峰值集中在遭遇频率ωe=-0.75 rad/s左右,其余遭遇频率下的垂荡RAO几乎为0,说明在长波条件下航母对垂荡自由度的响应较弱。当航母迎浪航行(浪向角大于90°)时,垂荡RAO曲线先小幅度减小,然后快速增大,在遭遇频率ωe=0.8 rad/s左右达到峰值,而后呈现断崖式衰减,这说明航母的垂荡运动响应在遭遇频率ωe=[0.5,1.0]的区间内最敏感。航速的改变并不会改变垂荡RAO随遭遇频率的变化趋势,但航速的增大会带来垂荡RAO峰值的增大。
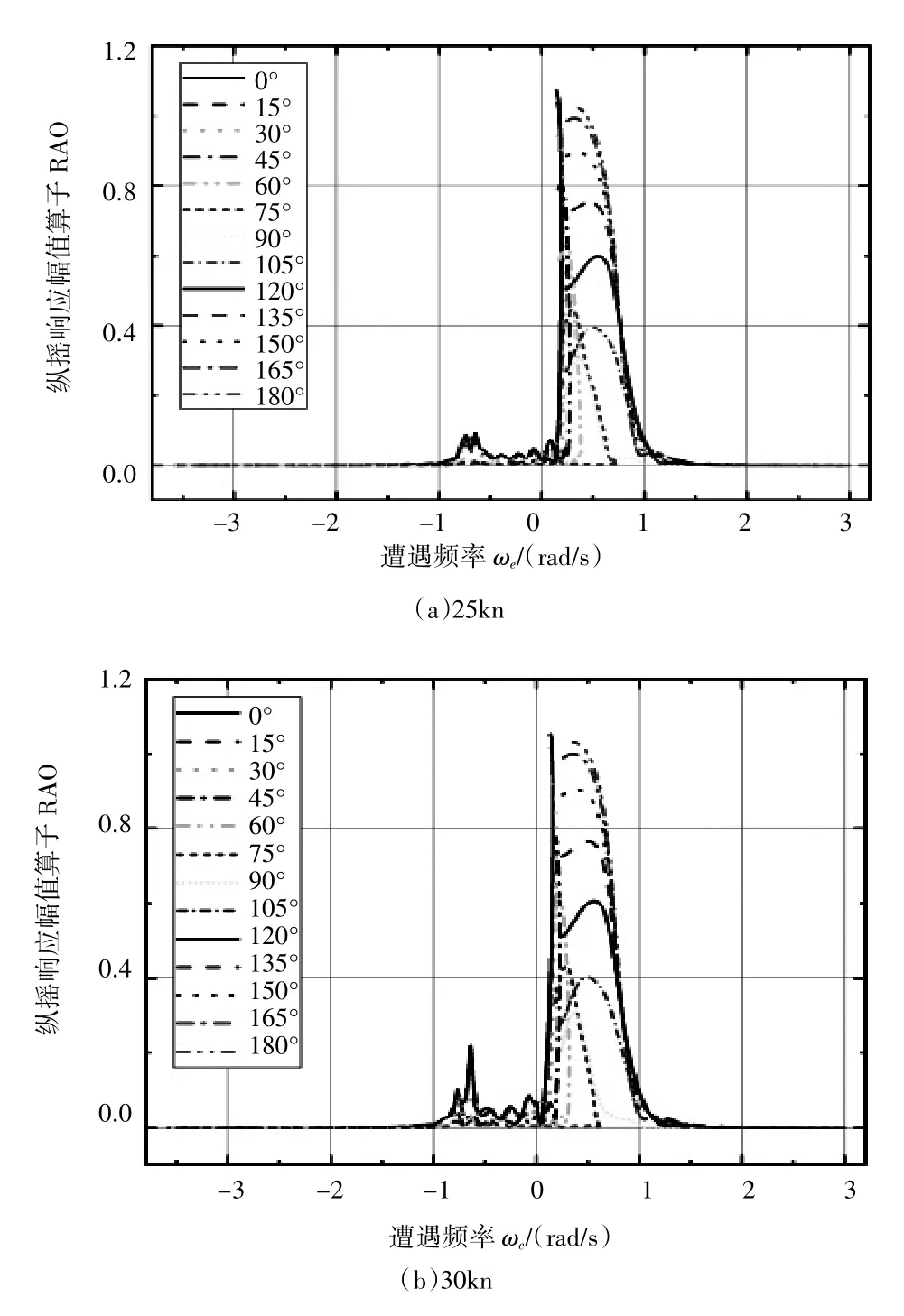
由图3可知,当航母顺浪航行时,纵摇RAO曲线在遭遇频率ωe=[-1.0,0.0]的区间内小幅度振动,其余遭遇频率下的纵摇RAO几乎为0,这说明浪向角小于90°时,波浪对航母的纵摇自由度影响较小。当航母迎浪航行时,纵摇RAO曲线先小幅度上升,同样在遭遇频率ωe=0.8 rad/s左右达到峰值,而后呈现断崖式衰减。其中,浪向角越大,纵摇RAO的峰值越大。3种航速的纵摇RAO曲线无论是趋势还是数值大小均基本一致,说明航速的改变不会对航母的纵摇运动产生较大的影响。
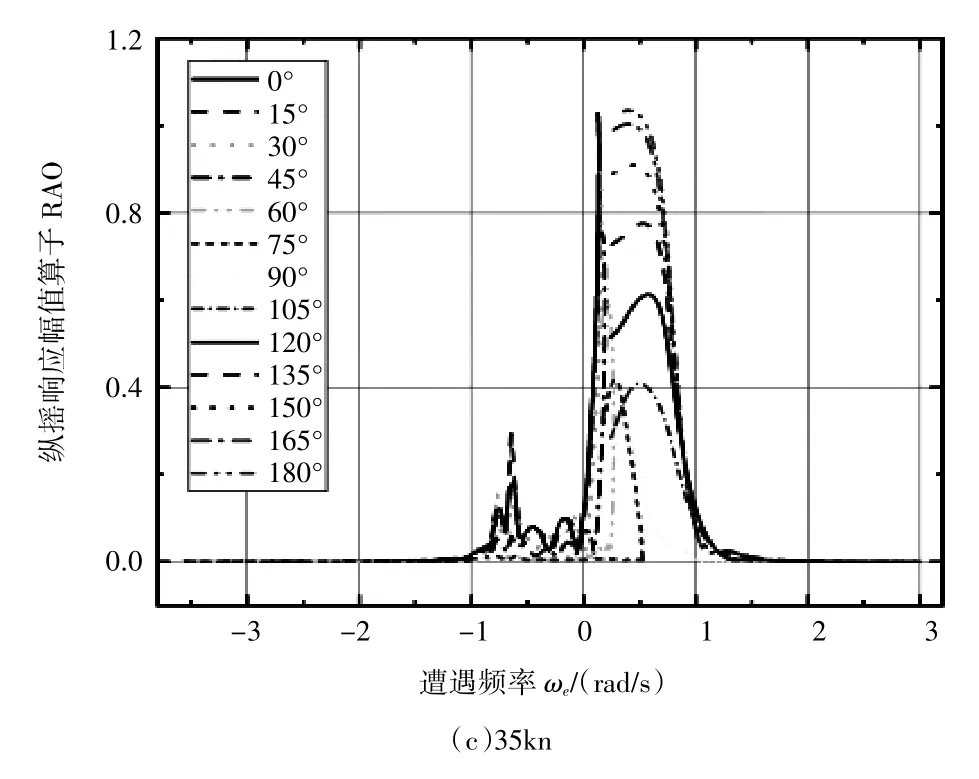
图3 不同航速及浪向下的纵摇响应幅值算子
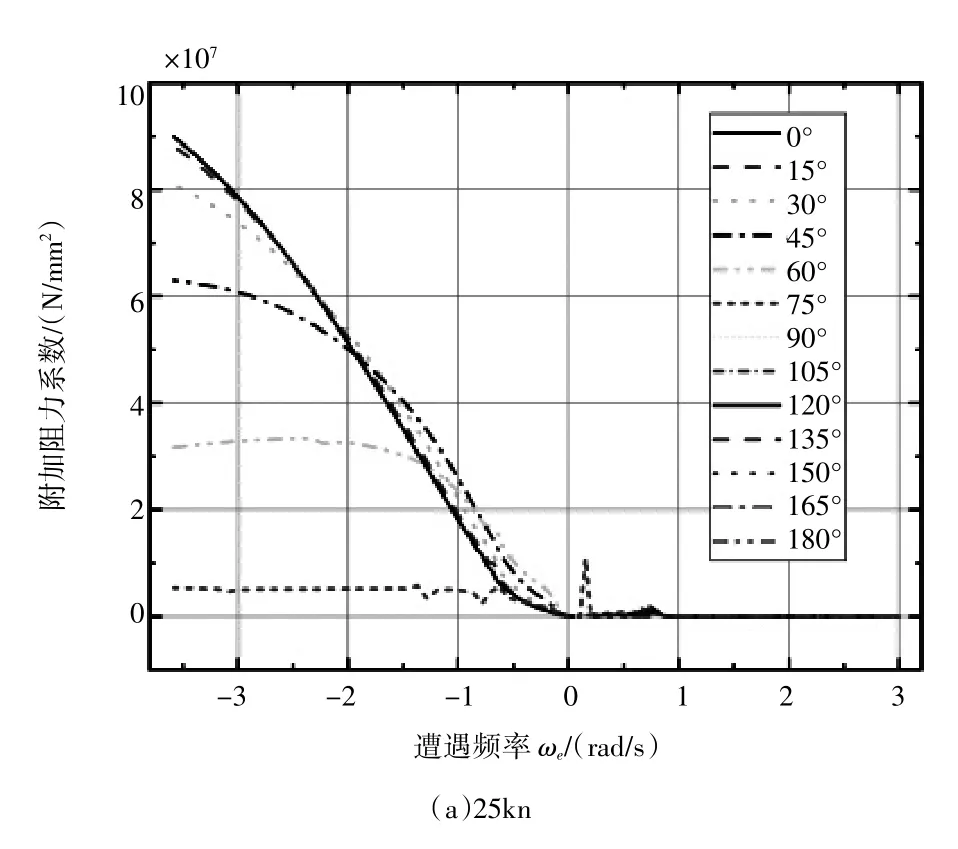
图4是规则波中不同航速及浪向下的附加阻力系数C_aw。该值有量纲,单位是N/m2。附加阻力系数与遭遇波能量谱的乘积即为波浪增阻。由图4可知,当浪向角小于45°时,附加阻力系数随着遭遇频率的增大而减小。浪向角为60°和75°时,在某一遭遇频率区间的附加阻力系数恒定不变。当浪向角大于90°时的附加阻力系数远小于浪向角小于90°,这说明迎浪航行的波浪增阻大于顺浪航行。
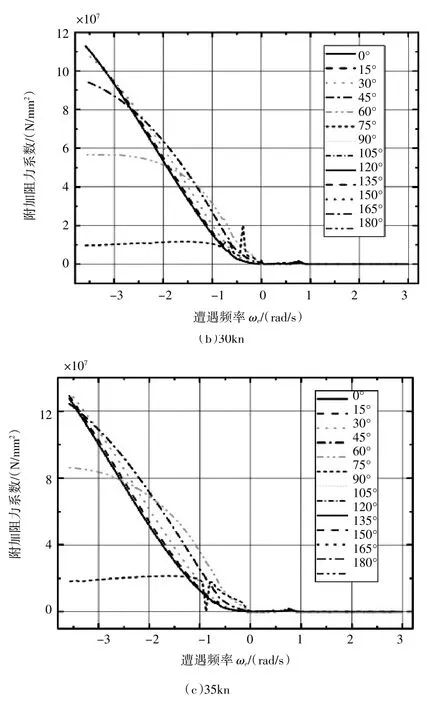
图4 不同航速及浪向下的附加阻力系数
3.2 阻力性能计算结果
图5是航母的阻力和功率曲线。由图5可知,阻力曲线是一条开口向上的二次抛物线,航速越大,阻力越大,且阻力的增值(曲线斜率)随航速的增大而快速增大。功率曲线随航速的变化趋势与阻力曲线基本一致。通过阻力曲线和功率曲线可以在航母设计前期预估航母的快速性能,从而为航母选择合适的螺旋桨和发动机,为航母设计提供一定的借鉴和参考。


图5 阻力和功率曲线
图6是航母的阻力系数曲线,主要有总阻力系数、剩余阻力系数、兴波阻力系数和黏性阻力系数。常见的阻力分类方式有两种:一种是按照流体性质,总阻力Rt可分为黏性阻力Rv和兴波阻力Rw;另一种是傅汝德阻力分类,总阻力分为剩余阻力Rr和摩擦阻力Rf。阻力系数是上述各项阻力分量的无量纲数,它单纯地反映了船舶的阻力性能,与船长、船宽、排水体积等参数无关。
由图6可知,航母的总阻力系数随航速先减小后增大,在航速17.5 kn左右达到谷值。理论上,航母的设计航速如果在该航速点,阻力性能最好。然而,由于其他因素例如作战需求,航母的航速不应过低。因此,航母的设计航速不会总是在最优的航速点。黏性阻力是航母水阻力的一个主要成分,来自于船体湿表面上的摩擦力。该航母的黏性阻力系数随航速的增加而减小,说明航速越大作用于船体湿面积上的水质点所产生的摩擦力越小。剩余阻力等于摩擦阻力加压阻力。当航速小于20 kn时,剩余阻力系数随航速的变化不大;当航速大于20 kn时,剩余阻力系数随航速的增大而增大。兴波阻力是航母总阻力的另一主要阻力成分,是恒速直航的航母在静水条件下产生的波浪所引起的。当航速小于20 kn时,兴波阻力系数随航速的变化不大;当航速大于20 kn时,兴波阻力系数随航速的增大而增大,该现象与剩余阻力类似。
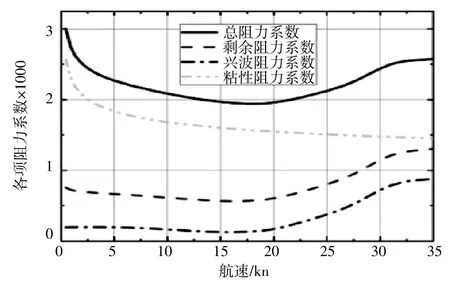
图6 航母阻力系数曲线
图7是航母在25 kn、30 kn和35 kn航速下的自由液面。由图7可以看出,航母在静水中以定常速率沿直线航行时存在两个波系:横波和散波,波系边界与船舶航向所夹的波浪半角为凯尔文角。横波的波峰大致上垂直于船舶的航线,与散波相比其波长更长。船艉后的波浪特征可以将其看作不同方向的多个规则线性长波峰的叠加来解释。船行波沿凯尔文角的方向衰减最慢,在船舶的远端破碎成细小且相邻的多个波。船舶造成的扰动是在船首处将水向外推开,即作为一个源,而在船尾处又将水吸收回去,作为一个汇。随着航速的增大,航母的散波越长,凯尔文夹角越小,船艉后的空穴区域也越来越大。

图7 3种航速下的自由液面
4 结语
当航母顺浪航行(浪向角小于90°)时,在长波条件下航母对垂荡自由度的响应较弱;当航母迎浪航行(浪向角大于90°)时,航母的垂荡运动响应在遭遇频率ωe=[0.5,1.0]的区间内最敏感。
航速的改变并不会改变垂荡RAO随遭遇频率的变化趋势,但航速的增大会带来垂荡RAO峰值的增大。
浪向角小于90°时,波浪对航母的纵摇自由度影响较小;浪向角越大,纵摇RAO的峰值越大,航速的改变不会对航母的纵摇运动产生较大的影响。
通过阻力曲线和功率曲线可以在航母设计前期预估航母的快速性能,从而为航母选择合适的螺旋桨和发动机,为航母设计提供一定的借鉴和参考。
该型航母的总阻力系数随航速先减小后增大,在航速17.5 kn左右达到谷值。理论上,该型航母的设计航速如果在该航速点,阻力性能最好,航速越大作用于船体湿面积上的水质点所产生的摩擦力越小;剩余阻力系数和兴波阻力系数随航速的增大呈现出先增大后减小的趋势。
随着航速的增大,航母的散波越长,凯尔文夹角越小,船艉后的空穴区域也越来越大。
