基于三体系统平动点轨道的环日全景任务轨道设计
2022-11-09蒋卓乐王亚敏张永合
蒋卓乐 王亚敏 张永合
(中国科学院微小卫星创新研究院 微小卫星重点实验室 上海 201203)
0 引言
太阳观测是研究太阳爆发、太阳活动周以及极端天气等事件起源的重要手段。日–地L1 点是开展太阳持续观测以及太阳风预警的理想空间位置[1,2]。NASA,ESA 等国际航天机构先后发射了SOHO,RACE,WIND 和ACE 等航天器进入日–地L1 点轨道开展太阳观测[3]。2020 年由ESA 主导的Solar Orbiter 探测器借助金星和地球引力变轨,进入环日高倾角轨道,对太阳高纬度地区进行近距离的观测[4]。2018 年NASA 发射的Parker 探测器是首个飞入日冕的太阳抵近观测航天器[5]。中国预计2022 年底发射ASO-S,以“一磁两爆”为科学目标,将成为中国首颗综合型太阳探测卫星[6]。太阳立体观测可以实现多角度同时观测及太阳高纬度观测。2006 年NASA 发射了STEREO 姊妹航天器,通过月球飞越,与地球形成了超前、置后轨道,在黄道面开展太阳立体观测[7]。2018 年,中国提出了在太阳黄道面组建6 星立体观测网——太阳全景探测,实现太阳磁场及日球层3D 观测[8]。Wang 等[9]基于这一概念,开展了科学轨道、深空转移轨道及任务的优化设计研究。
基于三体动力系统理论[10-13]的不变流形轨道,可以设计低燃耗的行星际转移,不但能降低运载费用,还能节省深空轨道机动的燃料需求,降低航天器规模。2007 年日本月球探测器月球-A 提出了通过日–地–月低能量轨道,捕获进入环月轨道的方案[14]。2001 年美国的Genesis 探测器是第一个利用三体系统不变流形轨道进入日–地L1 点的探测器[15]。中国的嫦娥二号探测器,从月球出发利用三体轨道的低燃耗优势,开展了日–地L2 点飞行及Toutatis 小行星飞越探测,极大拓展了任务目标[16]。环日全景任务的立体观测网处于黄道面,在地球轨道附近,日–地三体系统的不变流形为低燃耗的任务设计提供了可能。
本文提出基于日–地三体系统不变流形轨道的低燃耗环日全景任务轨道设计方法。利用日–地共线平动点的动力学优势,即L1 和L2 点附近Halo 轨道不稳定流形,来实现探测器从地球到太阳绕飞轨道的转移。在航天器到达观测位置时,即航天器–太阳矢量与地球–太阳矢量夹角105°/135°,施加轨道机动,通过航天器轨道周期与地球一致的措施来实现相位角保持。分析Halo 轨道幅值、Halo 轨道上的离轨点与转移时间及相角保持机动之间的关系,给出了燃料约束条件下的最优飞行时间方案,并对航天器平台和运载火箭规模给出了建议。
1 动力学建模
1.1 三体动力学模型
采用的动力学模型为圆形限制性三体问题(CRTBP)。航天器在两大主天体的共同作用下运动,在质心旋转坐标系中无量纲化的动力学方程为[17]

运动方程存在第一积分,称为雅可比积分,C=2Ω-(˙x2+ ˙y2+ ˙z2),C可表征轨道的能量大小,数值越大,能量越小。
1.2 Halo 轨道与不变流形
Halo 轨道及其不变流形是三体系统低能量轨道设计的基本要素。日–地三体系统共线平动点L1/L2 点附近存在周期的Halo 轨道,基于Lindstedt-Poincaré方法可得到halo 轨道的三阶近似解析解,通过微分修正方法,可获得高精度的数值解[18]。Halo 轨道存在稳定及不稳定流形与之相连。航天器沿着稳定流形飞行,则渐近进入halo 轨道,沿不稳定流形飞行则从halo 轨道逐渐远离,进入深空或返回地球。因此,不稳定流形可以应用到本文的深空低能量轨道设计。Halo 轨道的不变流形计算为[10]

其中,Xqpo为Halo 轨道上的状态矢量,Vu为该点对应的不变流形特征矢量;d为扰动量,这里d取值200 km。日–地L2 点105km 幅值Halo 轨道及其不稳定的不变流形如图1 所示。

图1 从L2 点出发的不稳定不变流形Fig. 1 Unstable invariant manifolds from L2
1.3 坐标转换
研究航天器的运动,需要用到日心惯性坐标系与日–地质心旋转坐标系之间的转换。日心惯性坐标系原点位于太阳质心。在质心旋转坐标系中,原点位于日–地系统质心上,两个大天体始终位于x轴。坐标系的角速度即为两大天体的相对角速度。日心惯性坐标系与日地旋转坐标系的转换关系可表示为

其中,RI和VI分别为日心惯性系下的位置和速度矢量,RR和VR分别为旋转坐标系下的位置和速度矢量。旋转矩阵Rz定 义为

2 基于不变流形的太阳全景部署轨道设计
根据设想,环日全景探测任务需要在黄道面组建均匀分布及绕太阳飞行的观测网。观测网点两两间的相位角为120°,实现对太阳全覆盖;每个观测网点由相距30°的两颗航天器组成,用于观测太阳矢量磁场。若地面望远镜或地球附近轨道的太阳望远镜作为一个观测网点,则该任务还需要部署两个观测点及4 颗航天器, 环日全景四星观测构型如图2 所示。

图2 环日全景四星观测构型Fig. 2 Observation configuration of Solar Ring mission
提出基于日–地三体系统不变流形轨道的低燃耗环日全景任务轨道设计方法,该方法借助于日–地Halo 轨道不稳定流形渐近远离的特性,通过低燃耗方式实现航天器与地球约120°相位角的分离,并实施轨道机动实现相位角的保持。由于不同的Halo 轨道幅值,Halo 轨道上的不同离轨点会带来轨道飞行时间及相位保持机动等轨道代价的差异,因此该方法还需对轨道代价进行详细分析,并基于等高线图对轨道开展优化设计,技术流程如图3 所示。鉴于Halo 轨道及不变流形的求解较为成熟,本节将主要对轨道飞行时间和相位保持机动求解过程进行介绍。

图3 基于不变流形的环日全景部署轨道优化设计方法Fig. 3 Flowchart of the design method for Solar Ring mission trajectory based on invariant manifolds
2.1 基于不变流形的日心转移轨道
为全面分析Halo 轨道上不同离轨点所对应的不稳定流形的轨道特征,将Halo 轨道按时间30 等分(见图4),获得30 个节点,作为不稳定流形轨道的离轨点。

图4 Halo 轨道周期30 等分Fig. 4 30 equal division of the Halo orbit
以Halo 轨道上30 个节点为初始位置,对不变流形初始状态表达式(3) 开展轨道递推。这里采用Matlab 的ode45 积分器,并以太阳–地球–航天器矢量夹角等于105°/135°为积分终止条件,即

对所有30 个离轨点的不变流形轨道进行计算,获取转移所需的飞行时间。
2.2 相位保持机动
为实现航天器在环日全景观测任务中与地球保持105°/135°稳定相位,需要施加轨道机动,使得航天器的轨道周期与地球轨道周期一致。根据Kepler 轨道运动方程,航天器的轨道周期仅与惯性系中的位置及飞行速度有关。航天器的能量公式为

其中,μ为太阳引力常数,rs和vs分别为航天器相对太阳的距离及速度。轨道周期与长半轴a的关系式如下:

式中,Ts和rs均为已知量,rs由不稳定流形轨道积分后,再从三体坐标系转换到日心惯性系后得到。
由式(8)可知,为了使得航天器轨道周期与地球轨道周期一致,航天器的速度大小应该为vsr,速度可以为任意方向。为了达到速度机动最小,节省燃料消耗,这里约定vsr与vs速度方向一致,则航天器进入相位保持轨道所需的轨道机动大小为Δv=vsr-vs。
3 仿真计算与分析
3.1 日心轨道均匀部署的不变流形轨道及飞行时间
以日–地L1 和L2 点Halo 轨道为停泊轨道,以不稳定流形为深空转移轨道,与地球形成105°/135°均匀分布。Halo 轨道的取值范围为Az∈[100000,500000] km,步长为50000 km。从L1 点Halo 轨道出发,不稳定流形轨道分为左右两个集合,这里采用左侧不稳定流形轨道集合。以105°相位部署为例,所有不变流形轨道如图5 所示。从L2 点Halo 轨道出发,且与地球相角呈105°的所有不稳定流形轨道如图6 所示。

图5 L1 不变流形105°相位Fig. 5 Invariant manifolds of L1 for 105° deployment

图6 L2 不变流形105°相位Fig. 6 Invariant manifolds of L1 for 105° deployment
不同幅值的Halo 轨道,不同Halo 轨道上的离轨点,所对应的不变流形轨道及其飞行时间均不相同。以上述105°相位轨道数据为基础,通过积分中止条件获取飞行时间。L1 点和L2 点Halo 轨道不稳定流形的飞行时间等高线如图7 和图8 所示,x轴表示Halo 轨道上的离轨点编号,y轴表示Halo 轨道幅值Az。
从图7 和图8 可以看出,Az对飞行时间影响比较小,Halo 轨道离轨点编号对飞行时间影响比较大。整体上来看,幅值Az增大,飞行时间变长。飞行时间与离轨点编号的关系略为复杂,对于L1 点Halo 轨道,离轨点编号较小时,飞行时间较短,最小飞行时间约为1450 天,对应离轨点编号4~13;飞行时间最长约为2100 天,对应的离轨点编号为20~25。对于L2 点Halo 轨道而言,情况与L1 点相反,离轨点编号20~25 对应着最短飞行时间,约为1550 天;最大飞行时间约为2100 天,离轨点编号5~10。通过L1 点和L2 点Halo 轨道不稳定流形部署航天器所需要的飞行时间相当,这意味着两个航天器可以几乎同时到达目标位置,开展科学探测。

图7 从L1 点出发的转移时间等高线Fig. 7 Contour map of transfer time for L1 departure
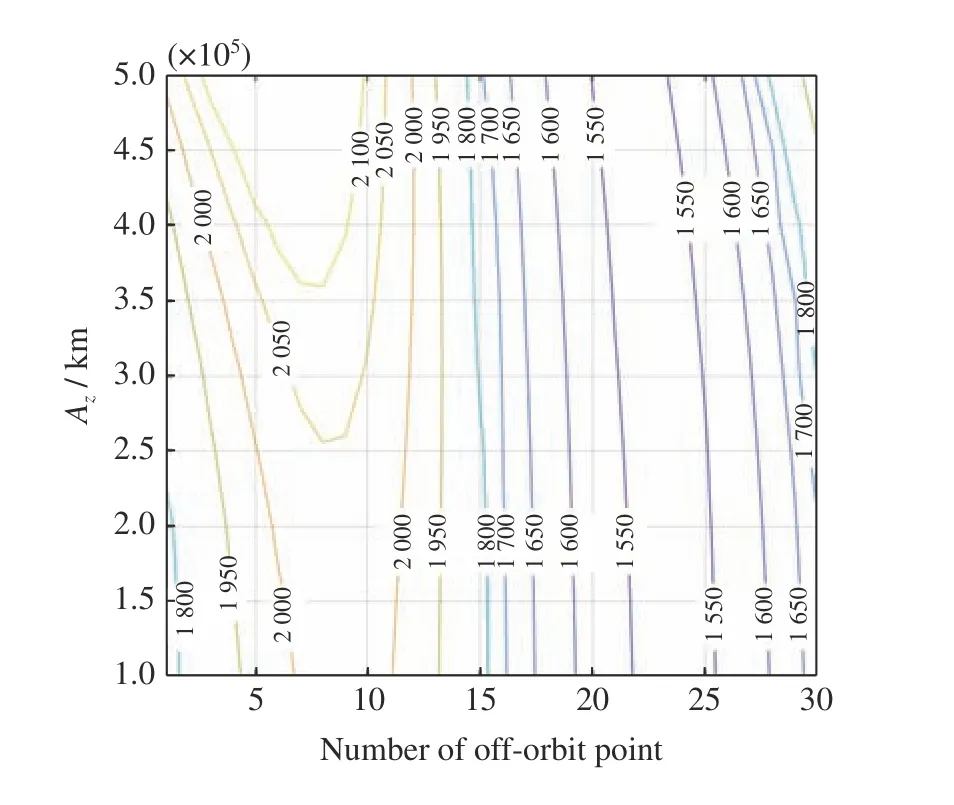
图8 从L2 点出发的转移时间等高线Fig. 8 Contour map of transfer time for L2 departure
3.2 均匀分布星座的燃料代价
通过2.2 节的相位保持机动算法获取轨道机动大小。从L1 点和L2 点Halo 轨道出发的不稳定流形轨道在105°相角时轨道机动大小的等高线如图9 和图10 所示。横坐标表示Halo 轨道离轨点编号,纵坐标表示Halo 轨道幅值。
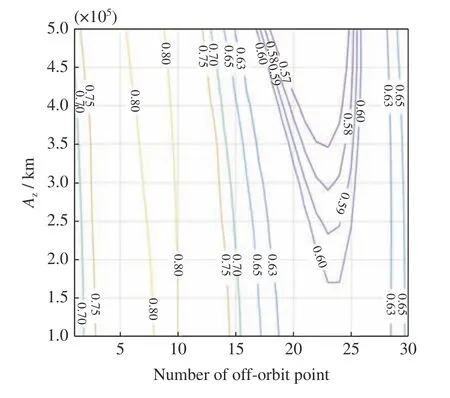
图9 从L1 点出发的速度增量等高线Fig. 9 Contour map of phasing maneuver for L1 departure
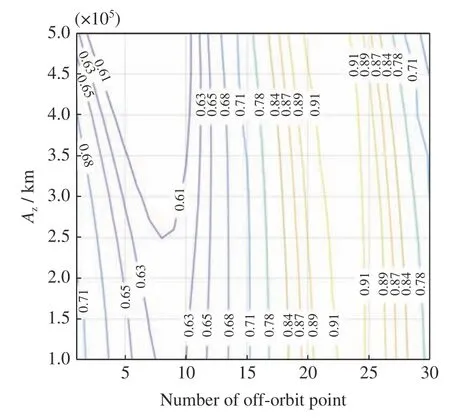
图10 从L2 点出发的速度增量等高线Fig. 10 Contour map of phasing maneuver for L2 departure
从图9 和图10 可以看出,Az方向的等高线梯度较小,无论从L1 点还是L2 点Halo 轨道出发,速度增量受幅值Az变化影响较小,受离轨点编号变化影响较大。幅值变大,相应速度增量变小,相位保持的燃料消耗降低。而机动大小与离轨点编号的关系,图9 和图10 则略有差异。对于L1 点而言,最小的轨道机动位于第20 ~25 离轨点,轨道机动大小0.57~0.6 km·s–1;最大的轨道机动位于第5~10 离轨点附近,轨道机动大小0.8 km·s–1。对于L2 点而言,最小的轨道机动约为0.61 km·s–1,离轨点编号为5~10;最大的轨道机动约为0.89 km·s–1,离轨点编号为20~25。总体而言,从L1 出发比从L2 出发所需要的速度增量小。
对比图7~10 发现,轨道机动小的区域,对应飞行时间较长,而轨道机动大的区域对应飞行时间较短。如图10 所示,L2 点Halo 轨道第5~10 离轨点所对应的轨道机动最小,约为0.61 km·s–1,但是相应的飞行时间却最大(见图8),约为2100 天。L1 点Halo 轨道所对应的图7 和图9 也有类似的结论。因此在轨道选择时,无法通过单一的指标,例如轨道机动最小、飞行时间最短来进行优化设计,需要综合考虑二者代价。
3.3 轨道机动约束条件下的最优飞行时间方案
鉴于航天器的轨道机动大小与燃料消耗及航天器质量密切相关,需要讨论轨道机动约束条件下的最优飞行时间方案。航天器的干重为460 kg[9],考虑长三甲运载能力与一箭双星发射方式,航天器总质量约640 kg(余量50 kg),在双组元推进系统假设下,130 kg 燃料可以提供0.75 km·s–1速度增量。因此,轨道机动的约束条件这里设定为0.75 km·s–1。
从图7~10 的分析可见,相位保持机动大小Δv与飞行时间长短成反比。依然采用等高线图方法,在Halo 轨道离轨点编号和Halo 轨道的幅值Az组成的xy平面上,对Δv≤0.75 km·s–1的区域绘制飞行时间等高线图,以此判断在满足轨道机动约束条件下的最短飞行时间解。从L1 点Halo 轨道出发与地球相位角105°的A 星轨道解空间如图11 所示。
从图11 可见,在Δv≤0.75 km·s–1的区域,飞行时间最小值约为1700 天,紧挨0.75 km 等高线。通过数据搜索,最短飞行时间为1655 天,对应离轨点编号15,Az=25×104km,位于0.75 km·s–1等高线上。采用同样的方法,对B, C, D 星的最优飞行时间方案进行搜索,三星的最优飞行时间方案对应的轨道机动均为0.75 km·s–1。B 星Az=10×104km,离轨点编号15,飞行时间为2010 天;C 星Az=45×104km,选择第14 离轨点,飞行时间为1697 天;D 星Az=30×104km,飞行时间为2095 天,离轨点编号为15。D 星入轨所需时间最长,约5.74 年。考虑航天器从地球发射到Halo 轨道入轨需飞行约120 天,以及航天器从Halo 轨道入轨到离轨还需一段时间停泊,约 90 天(第15 离轨点),则环日全景任务部署完成需耗时约6.38 年。飞行轨迹如图12 所示。

图11 轨道机动≤0.75 km·s–1 区域的飞行时间等高线Fig. 11 Contour map of flight time corresponding to phasing maneuver less than 0.75 km·s–1

图12 日地旋转坐标系中的最优飞行轨道Fig. 12 Optimal transfer trajectories with constrained phasing maneuver in the Sun-Earth rotation system
Halo 轨道的发射能量C3≈ 0 km2·s−2,对应长三甲运载火箭的运载能力为1450 kg。A, B, C, D 四星的质量、余量和部署时间列于表1。

表1 本文方案与文献[9]方案对比Table 1 Contrast between the scheme of this paper and the scheme of Ref. [9]
本文的轨道设计方法所获得轨道在部署时间上与文献[9]方案相当,在航天器规模上相比文献[9]均具有一定的优势,在航天器考虑50 kg 余量前提下,运载还有约170 kg 余量。
4 结论
以环日全景探测任务为背景,提出了基于日–地系统低能量轨道的低成本任务设计方案,通过三体系统不变流形轨道实现了航天器与地球稳定的相位角分布,借助等高线图获得了设计变量和设计约束的全局解空间,并设计了轨道机动约束条件下的最优飞行时间轨道,分析了航天器规模与发射方案,结论如下。
(1)所设计的轨道及运载发射方案相比文献[9],在部署时间上节省相当。由于采用低能量转移,火箭的发射质量提高,体现在一箭双星发射后,运载火箭还具有170 kg 余量。
(2)基于三体系统不变流形的轨道设计方法可以在0.75 km·s–1轨道机动约束条件下将航天器和地球的相位角维持在约120°,因此地球轨道上的ASO-S和SDO 等航天器可以作为第三组观测网,节省一组航天器的研制与部署成本。
