养殖工船电力推进调距桨动力系统策略
2022-11-09黎建勋董晓妮崔铭超杨栋轩
黎建勋,董晓妮,崔铭超,杨栋轩
(1 中国水产科学研究院渔业机械仪器研究所,农业农村部远洋渔船与装备重点实验室,上海200092;2 青岛海洋科学与技术国家实验室深蓝渔业工程联合实验室,山东 青岛266237;3 中国船舶集团青岛北海造船有限公司,山东 青岛266520)
目前全球约93%的渔业资源处于“完全开发或过度开发”状态[1],中国海洋渔业产业结构转型已迫在眉睫[2]。养殖工船融合了船舶技术与养殖技术[3],是推进中国海水养殖和海洋牧场建设的新型技术手段,是中国海洋渔业现代化建设和可持续发展的重要途径。近年,中国对深远海养殖工船总体技术、经济性论证、模型试验、规范指南、政策制定的研究接连展开[4-5]。2022年5月,全球首艘十万吨级大型深远海养殖工船“国信1号”完成交付运营,养殖工船技术取得实船应用,中国深远海大型养殖工船产业也实现了由0到1的进阶发展。目前深远海养殖工船面临的最大问题仍是初期投入成本非常高,很难找到合适的运营企业,成为制约其快速发展的瓶颈因素[5]。
电力推进技术因其具有节能、环保、噪声低、操纵性、机动性、可靠性、推进效率高等优势,在渔业船舶领域已逐步得到应用[6-13]。养殖工船动力系统是全船技术经济性和船舶造价影响的一项重要指标,工船采用电力推进技术可以降低柴油机总装机功率、提高经济性[14],但是电力推进其主要控制元器件较依赖于ABB、西门子等国外品牌,国产化率低[15-16]。
针对“国信1号”深远海养殖工船电力推进系统,基于适渔性要求,提出了一种电力推进调距桨动力系统策略。分析了该方案的技术特性、经济性、可靠性,及优缺点,希望能为中国深远海养殖工船推进方式适渔性研发和国产化率研究,提供借鉴和参考。
1 动力系统方案与适渔性要求
采用何种推进形式,实现养殖工船动力系统的操纵性、经济性、可靠性,与养殖工船生产模式相适宜,是养殖工船动力系统首要考虑的设计原则。养殖工船根据时节与水文变化,需要周期性的锚泊、游弋在目标海域,进行轮作式生产。“国信1号”养殖工船一年2季,主要开展大黄鱼养殖,工船具有航行、养殖、吸鱼、转场等多工况作业的特点。养殖工船动力系统可以采用常规主机推进或电力推进形式,螺旋桨形式也有定距桨(fixed pitch propeller,FPP)和调距桨(controllable pitch propeller,CPP)两种方案选择。由于工船全年长期运行于锚泊养殖作业状态,航行、转场的周期非常短暂,采用常规推进形式,主机将长期闲置,得不到利用[14],不具优势。相对而言,采用电力推进则具有柴油机总装机功率小、经济性高、与养殖载荷耦合性佳等诸多优势。
“国信1号”养殖工船采用电力推进双机双定距桨的推进形式。该方案较常规推进,经济性和适渔性优势明显,但推进系统大功率变频器、推进移相变压器、制动电阻等电气装置,设备重量和尺寸巨大,机舱空间占用多,设备散热量大,配电网络复杂。此外,推进系统变频装置等核心元器件也均为国外产品,价格较高,这些不利因素给我国养殖工船产业的推广带来一定困难。表1为“国信1号”养殖工船各工况下的动力系统主要性能参数。
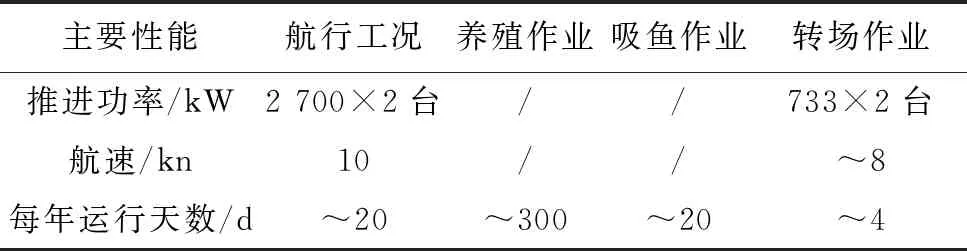
表1 “国信1号”养殖工船各工况动力系统主要性能参数
目前电力推进船舶,主推进和动力定位动力系统绝大部分都采用定距桨,而侧推动力系统则较多地应用到调距桨[17]。定距桨具有螺距固定,装置简单,成本低,管理方便,基本免维护的特点。并且定距桨比调距桨在轻载工况下节省10%~20%的功率,对于有较长时间轻载低速运行的船舶,有节能意义[18]。调距桨是通过设置桨毂操纵机构,使桨叶转动从而调节螺距[19],调距桨多应用于多工况作业、操控性要求较高的拖网渔船、工作船、破冰船[20],以及设有大容量轴带发电机且稳定性要求高的船舶。调距桨机构复杂,造价相对较高,效率也比定距桨稍低[20]。
对于电力推进养殖工船,无论采用定距桨或调距桨,因为船速都不是由柴油机转速调节,而是相应的由船用变频器(及其推进电机)或调距桨来调节,柴油机转速均可以长期运行在最佳油耗点处。同时工船电站也都设有功率管理系统(power management system,PMS),可以动态匹配工船推进、养殖负载和在网发电机数量,使柴油机始终运行在最佳负荷区间,因此二者都具有较高的燃油经济性。从表1可知,养殖工船作业工况多,工船全年“轻载运行”的状态非常之短,采用定距桨或调距桨两者能效差异也几乎可以忽略。
电力推进养殖工船,不同类型的螺旋桨对推进电机的要求也不同[21]。定距桨要求推进电机具有无级调速性能,而采用调距桨策略,推进电机将无调速需求,对推进电机可以大大简化为起动性能的需求,并首选软起动器的起动方案。综上,养殖工船采用电力推进调距桨+不调速电动机+软起动器的配置策略,在兼顾养殖工船燃油经济性与适渔性的同时,具有节省机舱空间,降低投入成本的可能。
2 养殖工船电力推进调距桨动力系统配置
“国信1号”电力推进养殖工船采用定距桨+调速电动机配置,主电站设计为AC 690V,其动力系统图如图1所示。系统主要包括以下设备:主柴油发电机组、配电板、移相变压器、推进变频器、推进电机和定距桨。系统配置5台AC 690V 3相50 Hz主柴油发电机组,每台功率为1580 kW;2台3 400 kVA大功率移相变压器;2台虚拟24脉冲二极管整流前端(Diode Front End,DFE)推进变频器,每台功率约2700 kW,采用水冷方式,配有制动电阻;2台2 700 kW主推进变频电机,额定转速为750 r/min;2只定螺距螺旋桨,并配有减速齿轮箱。系统AC 690V主配电板设计为2段汇流排,推进负载、主要养殖负载均布于汇流排两端。系统还设有2只1 800 kVA,AC 690V/400V日用变压器,也部分在汇流排两端,通过日用变压器可向全船AC 380V及AC 220V日用负载供电。
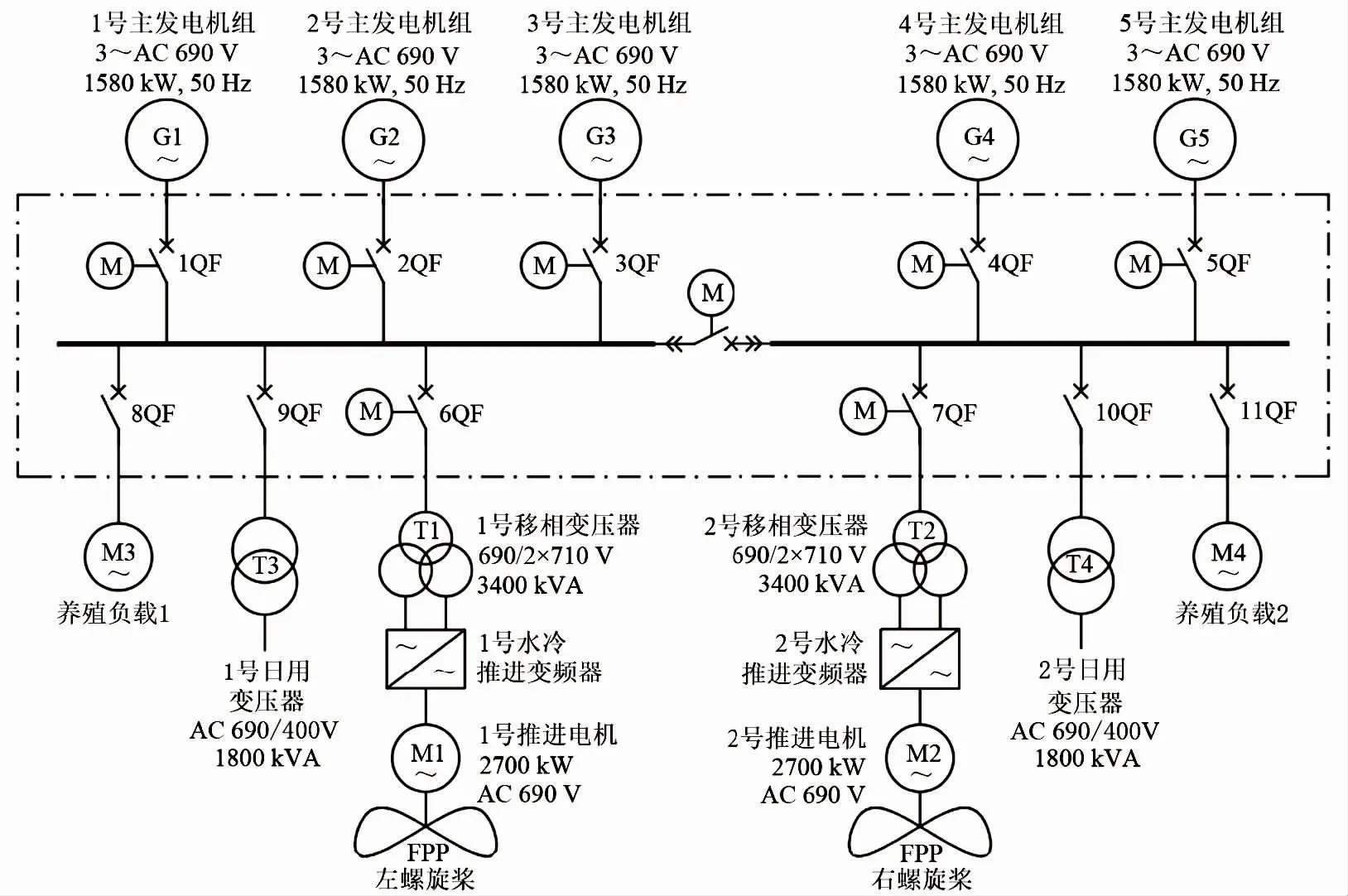
图1 养殖工船交流电力推进定距桨动力系统图
当采用电力推进调距桨+不调速电动机+软起动器的配置策略时,其动力系统图如图2所示。该系统主电源、养殖负载、日用负载配置与电力推进定距桨方案一致,主要不同在于:1)采用小功率变频软起动器及转换柜,取代了容量、重量、尺寸巨大的移相变压器、推进变频器、制动电阻;2)推进电机改为不调速的三相异步电动机;3)螺旋桨采用CPP设计;4)推进电机的起动过程,需将调距桨调节在“零螺距”状态下完成。
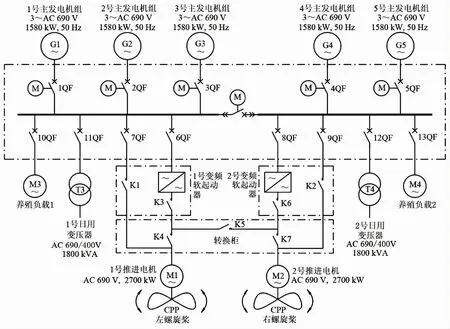
图2 养殖工船交流电力推进调距桨动力系统图
系统1号、2号推进电机均设计为三相异步电动机,功率仍为2 700 kW,并分别由1号、2号变频软起动器起动。2只变频软起动器设有转换柜,可实现2只变频软起动器互为备用。养殖工船在航行或转场中,当某一路起动器故障时,另一起动器通过转换柜仍可完成该路螺旋桨及推进电机的整个起动过程,从而提高推进电机供电的可靠性和动力系统的冗余度。2只变频软起动器在其起动器两侧也分别设有旁路接触器K1及K2。相较于常规软起动器的旁路接触器接线方式,该系统K1和K2旁路接触器也分别设有独立供电开关7QF和9QF,这样可以通过转换柜,实现单个旁路接触器分别对两路变频软起动器的旁通功能,进一步提高系统冗余度。当推进电机达到额定转速,在软起动结束后,通过接通旁路接触器触头,软起动器退出运行,推进电机通过旁路接触器回路供电。这样可以有效延长软起动器的使用寿命,避免电网谐波污染。
对于不调速大功率电动机,采用软起动器电力驱动的形式,是较为常用的一种措施。软起动器具有无冲击电流、恒流起动、可自由地无级调压至最佳起动电流及节能等优点[21],但是其起动转矩较小。本方案进一步采用变频软起动器,改善了这种不利,并具有以下优点:1)可以调压调频,增大起动转矩。起动时电动机的气隙磁通保持恒定(φ=kU/f),既能实现无过电流起动,而且还能提供1.2~2倍额定转矩的起动转矩;2)减少电网谐波。软起动用变频器,整流器多采用二极管整流,产生的高次谐波少,减少了电网侧的高次谐波,功率因数高。而且对于养殖工船来说,这个起动过程时间非常短,当供电转为旁通模式时,对电网几乎无谐波输入;3)变频软起动器容量小。由于起动用变频器系短时工作制,所以其容量要比普通的变频器小很多,一般为调速用变频器的1/3~1/4[22]。
3 变频软起动器容量的确定
根据调距桨的调速性能,一般认为调距桨在零推力时的耗能约为满载时的20%左右[23-24]。当需要起动推进电机时,螺旋桨处于零螺距,螺旋桨空转,推进电机将基本处于空载状态,三相异步电机空载电流约为额定电流的30%~70%[25-26]。因此,当三相异步电机的功率仍为2 700 kW时,其变频软起动器的功率却可以不必按照推进电机2 700 kW的功率等级来选择,可以选择适宜小功率的变频软起动来实现推进电机的起动需求。
螺旋桨空转状态,动力系统的耗能主要来源于推进电机的空载负荷。如果估算出异步电动机的空载电流,进而换算出异步电动机空载状态下的输入功率,则可进一步选择较准确的软起动器容量。对于交流三相异步电动机而言,空载电流的大小与异步电动机的气隙磁密、气隙磁阻、绕组定子、转子磁阻、绕组匝数有关,也与额定电流存在一定的比例关系[27-28]。对于1 kV及以下的交流三相异步电动机,当缺乏磁路特征参数时,其空载电流大小的近似值可以根据以下公式得出[29]:
(1)
式中:I0为电动机空载电流;IN为电动机额定电流;cosφN为电动机的额定功率因数;K为系数,按电动机极对数取值,2极,K=5;4极,K=4;6、8、10极,K=3.5。
根据空载电流值,可以相应得出空载状态下电动机的输入功率,约为660 kW。螺旋桨及其推进电机的特性,类似于风机、泵类负载,通常该类负载软起动器的功率约为负载额定功率的1.1倍及以上,考虑到软起动的功率因数、效率等因素,变频软起动的容量最终为选定为800 kW。如按前文,软起动器的容量约为调速用变频器的1/3~1/4换算,则变频软起动器容量约为675 kW~900 kW。综上,变频软起动器容量选定为800 kW是适宜的。
这意味着,在零螺距状态下,推进电机从零转速起动到额定转速,800 kW的变频软起动器可满足此功能。显而易见,该容量等级的变频软起动器要比2 700 kW等级的变频器重量、尺寸、散热小很多,并完全可以采用风冷形式,这样就大大降低了电力推进配电部分的成本,也更有利于国产船用变频器的选型。
4 电力推进调距桨特性分析
4.1 零螺距起动过程
电力推进定距桨是通过变频驱动电动机的调速,来改变螺旋桨的推力以获得不同的航速,螺旋桨本身无需另外的任何控制[23],且定距桨电动机具有恒转矩和恒功率调速性能,低转速时转矩也大。而采用电力推进调距桨时,在航行过程电动机不调速,通过调螺距来改变转矩、推力和航速,电动机运行及调节性能与采用柴油机直接推进调距桨作动力时相似。通常是小螺距时,转矩小,推力也小,想要获得大转矩和航速,电机只能在额定转速及大螺距下运行。
根据调距桨的调速性能,在需要起动推进电机时,首先调节螺旋桨螺距,使处于“零螺距”状态。此时船速为零,通过变频软起动器控制,推进电机带动螺旋桨,转速从零运转至额定转速。养殖工船螺旋桨及推进电机的零螺距起动特性曲线如图3所示。
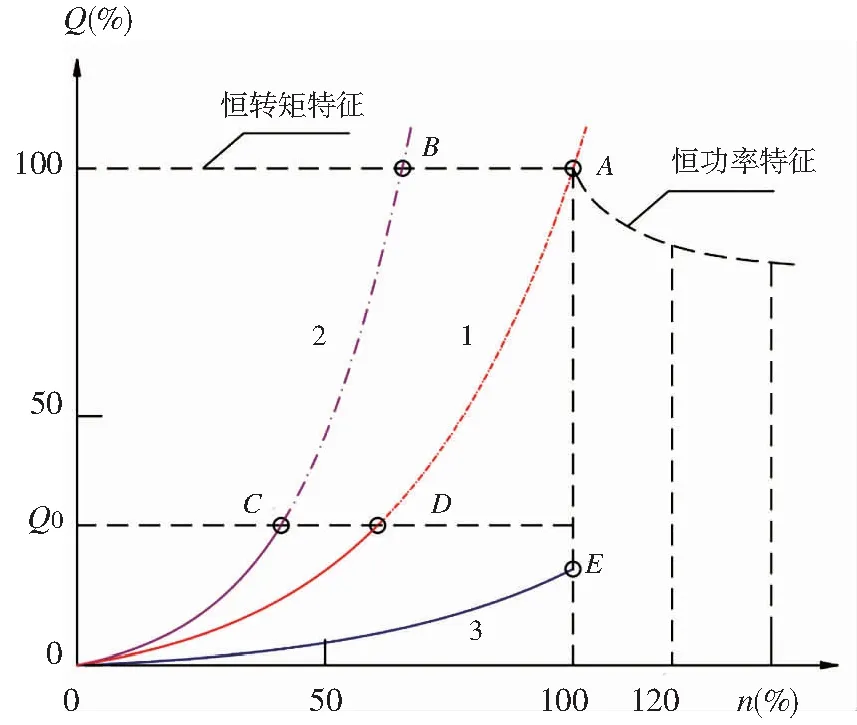
图3 养殖工船螺旋桨及推进电机零螺距起动特性曲线
图3中1为螺旋桨自由航行特性曲线,自由航行曲线是船舶在风平浪静的静水中航行时的螺旋桨机械特性曲线;2为螺旋桨系柱特性曲线,可看作船舶在码头被系泊拉住或被艉锚拉住;3为零螺距起动螺旋桨特性曲线;图3中的恒转矩和恒功率特性为电力推进定距桨时的推进电机的特性曲线, 供对照参考;Q0为零螺距变频软起动下的电动机转矩。
根据螺旋桨理论,螺旋桨转矩关系如式(2)。
Q=KQρn2D5
(2)
式中:Q为螺旋桨转矩,N·m;KQ为转矩系数;ρ为水的密度,kg/m3;n为柴油机的转速,r/s;D为调距桨的直径,m。
在自由航行曲线上,螺旋桨转矩与转速成二次方关系,是典型的平方转矩负载特性。螺旋桨特性曲线是随着船舶推进阻力变化而改变的一簇曲线,自由航行特性曲线是其中典型的一条特性曲线。当船舶航行阻力增大或更小时,螺旋桨特性曲线将相对应的较自由航行特性曲线更高或更低。
螺旋桨吸收功率与转矩关系式如公式(3)所示,结合公式(2)可以看出,螺旋桨吸收功率与转速成三次方关系。
(3)
式中:P为螺旋桨吸收功率,kW;Q为螺旋桨转矩,N·m;n为柴油机的转速,r/s;
调距桨在零螺距起动阶段,螺旋桨轻载运行,处于零推力螺距工况[30],其特性曲线3分布在自由航行曲线下侧。此时螺距为零,船速为零,推力为零,螺旋桨转矩和功率需求较低。当推进电机到达额定转速后,变频软起动器退出,推进电机通过软起动器的旁路接触器,继续在额定转速下运行。由于采用了变频软起动器,推进电机的转矩获得了一定提高,可在Q0范围内(可以有一定的短时过载能力范围)表现为低速大转矩特性。从图3可知,采用变频软起动器控制的电力推进调距桨,当螺距小于一定值时,推进电机仍可在该轻载状态下通过变频控制实现恒转矩运行。螺旋桨也仍可运行在螺旋桨自由航行曲线线段“OD”以及系柱特性曲线线段“OC”上。此时与电力推进定距桨性能相似,并且相比柴油机直接推进调距桨,养殖工船仍能在较佳的燃油经济性状态下维持低速航行。
4.2 调螺距运行过程
当螺旋桨和推进电机达到额定转速后,养殖工船动力系统改为调螺距运行。通过调节螺距,来改变螺旋桨转矩、推力、功率以及工船航速,螺旋桨转矩即运行在图3线段“EA”上。随着螺旋桨转矩和功率的持续加大,螺旋桨沿着线段“EA”最终汇聚在自由航行曲线1的工作点A。此时,养殖工船螺推进电机达到额定转矩,工船运行在额定航速下。根据螺旋桨转矩计算公式(2),可以看出此过程中,螺旋桨转速恒定,螺旋桨转矩随转矩系数而变化。公式(4)给出了转矩系数的函数关系,为螺旋桨进速系数和螺距角(螺距比)的函数[31-33]。
KQ=f(J,P/D)
(4)
式中:J为螺旋桨进速系数;P为螺旋桨螺距,m;D为螺旋桨的直径,m。
对于螺旋桨,通常由螺距比P/D来表征其螺距角。调距桨就是改变螺距角,从而得到不同的螺距比值来改变转矩、推力和功率。由于螺旋桨实际工作特性极其复杂,导致转矩系数很难与进速系数和螺距比P/D建立精确的数学模型,通常是根据敞水螺旋桨模型试验结果绘制的螺旋桨敞水特性曲线图谱查得[24,33]。图4为某型调距桨敞水特性图谱[34]。从图4可知,当进速系数一定时,转矩系数随着螺距比P/D的增加而增加,这意味着养殖工船螺旋桨的推力和转矩随之增加。

图4 调距桨敞水特性图谱
当养殖工船在稳定的航行工况,其调距桨的调速特性如图5所示。图5中的实线a、b、c、d、e、f、g是一组从大到小不同螺距比的螺旋桨特性曲线,而虚线1、2、3、4、5则是一组从大到小不同等航速的速度特性曲线。该等航速线,通常是反映传统柴油机直接推进调距桨的特性曲线,实现柴油机转速、螺距比的联合控制[35-36],可以反映出柴油机转速和螺距比、船速的一个动态平衡关系和不同航速下的最优设计点。由于本方案电动机不调速,相比传统的柴油机直接推进调距桨而言,只能在额定转速下单一的通过调节螺距比来改变航速。所对应得到图5中的不同航速V1、V2、V3、V4、V5、V6,都是运行在额定转速线上。只有当航速小于某一值,满足变频软起动器和推进电机轻载运行的工况,方可实现转速、螺距比和养殖工船低航速的联合控制。

图5 调距桨调速特性图
5 定距桨与调距桨性能对比
通常调距桨价格要高于定距桨。但是由于配电装置的不同,两者差异会很大。在本电力推进调距桨策略中,通过调距桨控制船速的策略,采用了三相异步电动机,这样就免去了造价较高的三相绕组移相变压器、大功率12脉冲水冷变频器,取而代之的是小容量的变频软起动器,这样配电装置的成本大大降低。调距桨方案的总造价也得到很大降低,两者的造价比较如表2所示。通过表2可以得到,采用电力推进调距桨方案,系统因为主要减少了大功率的三绕组移相变压器、虚拟24脉冲水冷变频器等,虽然调距桨方案成本有所增加,但总体造价减少了184万元,约22.6%。

表2 定距桨与调距桨造价比较
结合前文分析,电力推进定距桨与电力推进调距桨,两者的性能比较如表3所示。
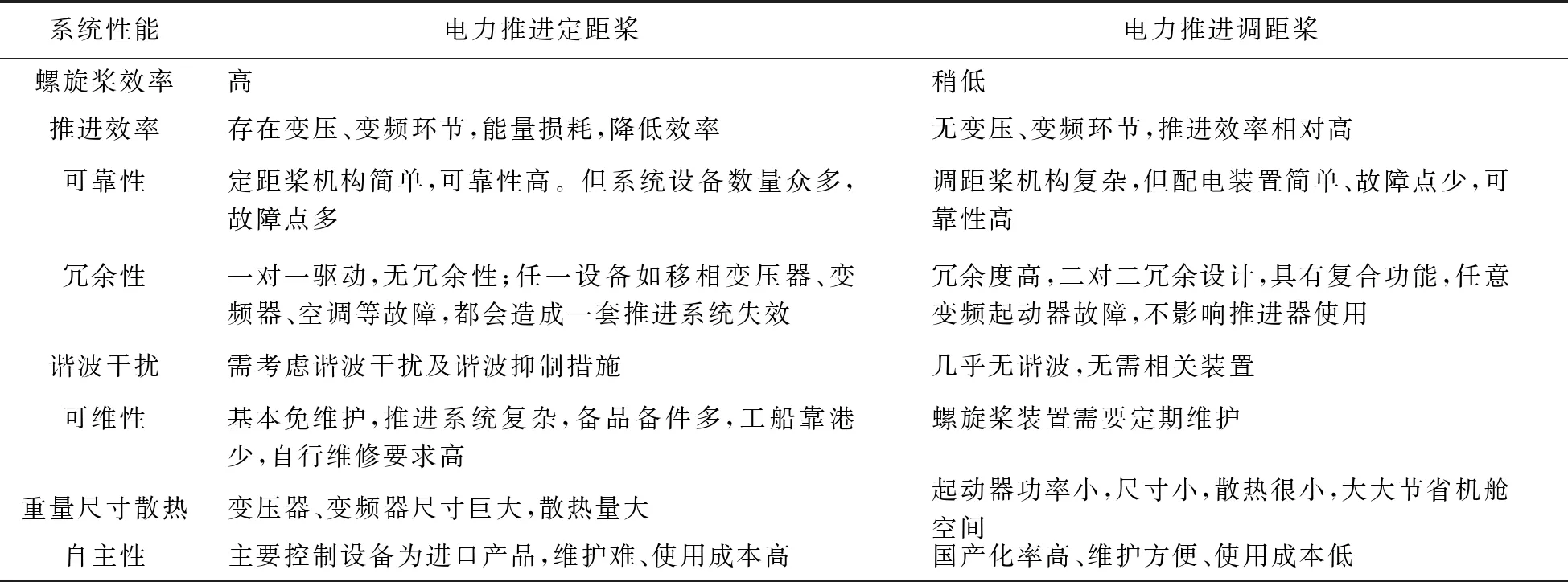
表3 定距桨与调距桨方案性能比较
从表3二者的性能比较可以看出,电力推进定距桨和电力推进调距桨互有优势和不利因素。传统方案下的调距桨,因为小功率、小转矩、效率相对低、维护要求高,调距桨机构复杂,以及价格高等因素,会认为调距桨劣势会相对明显。由于本船电力推进调距桨策略,充分利用了调距桨“零螺距”状态下空载起动推进电机的特性,同时采用变频软起动器,提高了低速下的转矩性能。使得调距桨策略的优势大大增强,可靠性也得到很大改善。
6 讨论
6.1 系统策略可行性与适渔性
目前电力推进船舶绝大部分都采用定距桨[17],“国信1号”养殖工船也采用此种推进方式,本方案则在电力推进系统的基础上,结合养殖工船长期锚泊与短期游弋轮作式生产的作业特点,提出了一种新的调距桨+不调速电动机+变频软起动器的动力系统策略。构建了系统配置方案,提出了主要设备变频软起动器的容量选型设计思路,并分析了该系统的主要运行特性,系统具有可行性与适渔性。
6.2 电力推进调距桨系统经济性
通常认为调距桨经济性低于定距桨[20],但对长期处于锚泊作业状态的养殖工船来说,这种差异性不大。此外,由于采用了电力推进的方式,定距桨与调距桨的柴油机转速、负荷率均可以维持在最佳区间,都具有较高的燃油经济性。虽然调距桨要比固定桨费用高,但电气设备的差价远大于螺旋桨的差价,可节省总造价约22.6%,也显示出了造价经济性优势。
6.2 电力推进调距桨系统可靠性
常规双机双桨的电力推进系统都是一对一驱动[37],无冗余性。该系统2只小功率变频软起动器则具有复合功能,任意变频器故障不影响推进器使用,系统的冗余度、可靠性大大提高。虽然调距桨机构复杂,故障率相对较高[38-39],但该系统取消了移相变压器、水冷变频器、制动电阻等装置,简化了系统配电装置环节,系统故障点相对减少,可靠性也得到提高。
6.3 电力推进调距桨与定距桨的差异及创新性
一般调距桨在零推力时的耗能约为满载时的20%[23-24],该策略反而将这种传统意识的不利因素加以应用。利用调距桨“零螺距”特性,以及变频软起动器的起动特性,可以实现推进电机在起动阶段“空载起动”,用小功率起动器实现大电机无级、平滑、大转矩起动;起动完成后,转换为调距桨对航速的完全控制。
该系统由于采用了小功率变频软起动器,其容量仅为定距桨变频器容量的29.6%,完全可以采用国产化设备。这有利于提升中国船用设备配套自主化和本土化率,逐步摆脱对国外公司的依赖局面[17]。同时该系统配置、尺寸也大为简化,总体上既节省了机舱空间,又降低了投入成本,而且系统几乎不用考虑电力推进定距桨船舶不可避免的谐波干扰影响。
6.4 系统的不足之处
通常认为调距桨需要定期维护[40],随着调距桨装置的技术性能的日趋提高,相信会得到改善。结合系统调距桨调速特性,该电力推进调距桨动力系统策略,在常规操作模式下,对航速的控制只能通过调螺距来实现,相对单一。而常规推进的调距桨船舶,通常则具有柴油机转速、螺距比的联合控制优势,机桨匹配范围更大。
7 结论
养殖工船因其自身特有的锚泊与游弋多工况作业特点,采用常规主机推进+调距桨的策略不经济,而主流电力推进船舶又以定距桨居多。该系统在应用电力推进优势的背景下,采用电力推进+调距桨+变频软起动器动力系统策略,将电力推进、调距桨、变频软起动器三者的优势充分结合,使电力推进动力系统的经济性、可行性、适渔性、可靠性,得到了进一步挖掘,具有适宜的应用场景,尤其是当机舱空间需求度大,初期投入成本期望能较低时。