多幅X射线旋转图像轮廓对应点坐标提取和匹配方法研究
2022-11-08万书亭王萱张伯麟尹涛
万书亭,王萱,张伯麟,尹涛
(1.华北电力大学河北省电力机械装备健康维护与失效预防重点实验室,河北 保定 071003;2.中国航空工业集团公司金城南京机电液压工程研究中心,江苏 南京 211106)
电力设备X射线检测技术不断趋于成熟,目前在大量的变电设备无损检测中都得到成功应用,如GIS、干式变压器、电压电流互感器、断路器、隔离开关等。该系统自应用以来,在实践操作中成功检测出多起变电设备重大缺陷,带来了良好的社会效益和经济效益,因此具有巨大的推广潜力[1]。然而在大量的工程实践中,由于多数待检测工件存在工件厚度不一、外部轮廓不规则、内部构造复杂多样等特征,同时通过X射线图像进行无损检测是依靠技术人员凭借经验直接观察图像进行判断,效率较低且容易出现误诊现象[2-4]。电力设备本身是空间三维体,利用X射线检测系统得到的二维平面的投影图像来反映三维体的情况,在直观显示上存在着局限性。因此,通过三维重建技术将二维图像还原为电力设备三维结构,对于提高缺陷识别和判读具有十分重要的意义[5]。
应用数字图像处理技术,实现X射线图像中背景与电力设备的分离,并结合边缘检测技术,获取设备轮廓曲线,可以方便且直观地对X射线图像中电力设备进行检测。但得到的轮廓曲线只是简单存储在一个二维稀疏矩阵中,点之间没有向量关系,无法对轮廓进行进一步的分析研究。
本文针对电力设备水平旋转拍摄得到的多幅X射线图像进行分析,研究X射线数字图像目标轮廓的提取和多幅图轮廓对应点匹配问题,目的在于提供一种多幅X射线旋转图像轮廓对应点坐标提取和匹配新方法;应用边缘检测获取X射线图像轮廓点,通过正交优先的8邻域遍历追踪改进算法对轮廓点进行存储,实现了目标轮廓线的顺序存储;同时运用像素点均分插值的方法对多幅图像轮廓对应点进行匹配,使得同一点在不同图像上的表示点可以一一对应;最后运用旋转图像点的坐标变换矩阵,实现对已获得的旋转图像对应点坐标的逆求解,得到轮廓线点的三维坐标,并实现轮廓的三维重建。
1 X射线图像处理
图像预处理,可以突出图像中的有用信息,衰减无用信息,提高计算机对图像的识别能力,常用方法有图像类型转换、去噪处理、图像增强处理、图像分割处理等。
1.1 去噪处理
电子由阴极发射器激发后部分被物体吸收,部分落在X射线成像板,形成物体的X射线图像[6]。X射线图像噪声是电子曝光形成的,通常满足泊松分布:

式中:λ为均值为均方根。
目前对X射线数字图像去噪主要是对噪声图像进行平方根运算,会导致图像中大量细节丢失。中值滤波是一种非线性的处理方法,对量子噪声有较好的抑制,同时可以降低去噪过程对边缘信息的破坏。数学形态学处理既可以消除小且无意义的目标物,也可以来填补目标区域中某些空洞,适用于X射线图像的噪声去除[7-9]。
1.2 图像增强
图像增强技术可以加强计算机对图像判读和识别效果。针对图像增强,可采用直方图均衡化、对比度增强法、平滑噪声、锐化等方法[10-11]。
1.3 图像分割
图像分割根据图像中物体的特征将图像划分为若干区域,从中提取感兴趣的部分。最大类间方差法是按图像的灰度特性将图像分成背景和目标两部分,将两部分差别最大的分割结果作为最终分割结果。最大类间方差法适用于X射线图像分割[12]。
1.4 边缘检测
目前在边缘检测中,常用的算子主要包括:Roberts算子、Sobel算子、高斯-拉普拉斯算子、Canny算子等。通过图像预处理得到X光片的二值图,有明显的阶跃边界,在边缘检测时没有渐变的弱边界,而Canny算子在边缘检测时有较好的信噪比和检测精度,适合X光片二值图的边缘检测要求。对图像进行二值化、图像形态学处理后,结合Canny算子进行边缘检测,检查图像轮廓,得到图像的轮廓曲线,用二维稀疏矩阵存储图像A的轮廓信息,矩阵的行数和列数表示图像的长和宽[13-14]。
2 改进8邻域遍历追踪法
从已知点根据轮廓线对轮廓轨迹进行追踪,通常采用的方法是8邻域遍历追踪法。其方法是:轮廓点周围的8个像素点,按照一定的顺序(顺时针或逆时针)对像素点的灰度值进行判断寻找符合要求的像素点,然后记录该点的坐标并以此为起始点继续搜索。该方法有局限性,图像上的某些斜线在搜寻过程中容易在连续线段上停止搜索,再另寻起点进行下一轮的搜索[15]。为了避免存储的点不能连成连续线段,提出了一种正交优先的8邻域遍历改进算法。
8邻域遍历追踪在搜寻轮廓点时默认有一个优先级,假设从起始点的正上方开始按顺时针搜索,那么搜索的优先级可以表示为矩阵Mo:
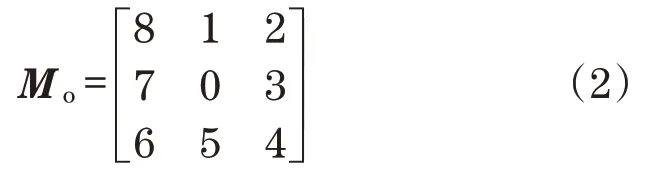
同样假设从起始点正上方开始按顺时针搜寻,正交优先的8邻域遍历追踪方法的优先级可由矩阵M表示:
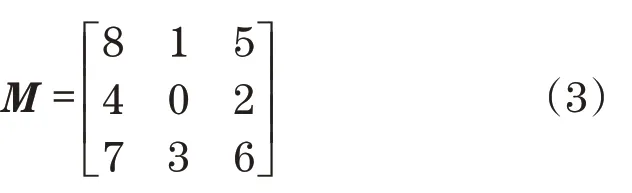
图1为某一轮廓的局部放大图,字母N代表该像素点上的值为1,属于轮廓线上的点;(a,b)中a为传统8邻域搜索顺序,b为正交优先8邻域搜索顺序。
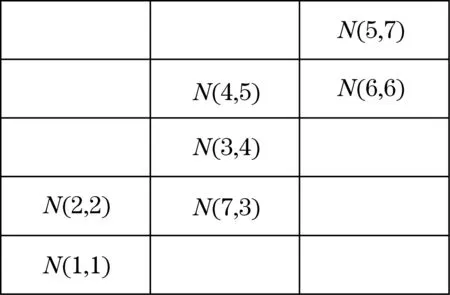
图1 轮廓点搜索顺序对比Fig.1 Contour point search sequence diagram
将轮廓点搜寻顺序连线,可以更直观地看到正交优先8邻域遍历方法的优越性,如图2所示。两组图各自对比可以发现,传统方法对这类曲线进行轮廓搜寻时会漏掉一些轮廓线上的点(如图2(a)的红色像素点),当按照顺时针搜寻结束后,还需要掉头再去寻找遗失的点,最后依次连接存储的点无法得到正确的轮廓线;而改进的正交优先8邻域轮廓追踪方法是严格按照轮廓线的趋势搜寻,不会出现遗失,最后依次连接存储的点可以得到正确的轮廓线。
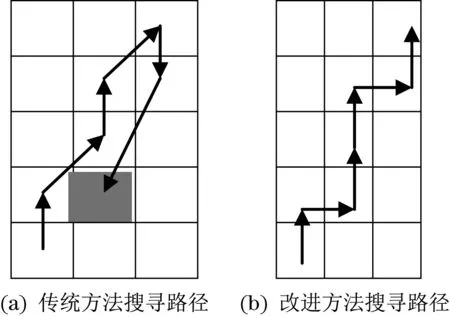
图2 轮廓点搜寻路径对比Fig.2 Contour point search path comparison
图3(a)和图3(b)分别是使用传统搜寻方法和改进方法搜寻轮廓点的路径,对比传统搜寻方法和改进方法搜寻轮廓点的路径以及其局部放大图可以看出:传统方法在对曲线进行轮廓搜寻时路径错误,虽然可以得到所有的轮廓点,但是轮廓点存储顺序错误,连接后无法得到正确的轮廓线;而改进的正交优先8邻域轮廓追踪能够按照轮廓线的趋势搜寻并保存轮廓点的坐标,最终得到正确的轮廓线。
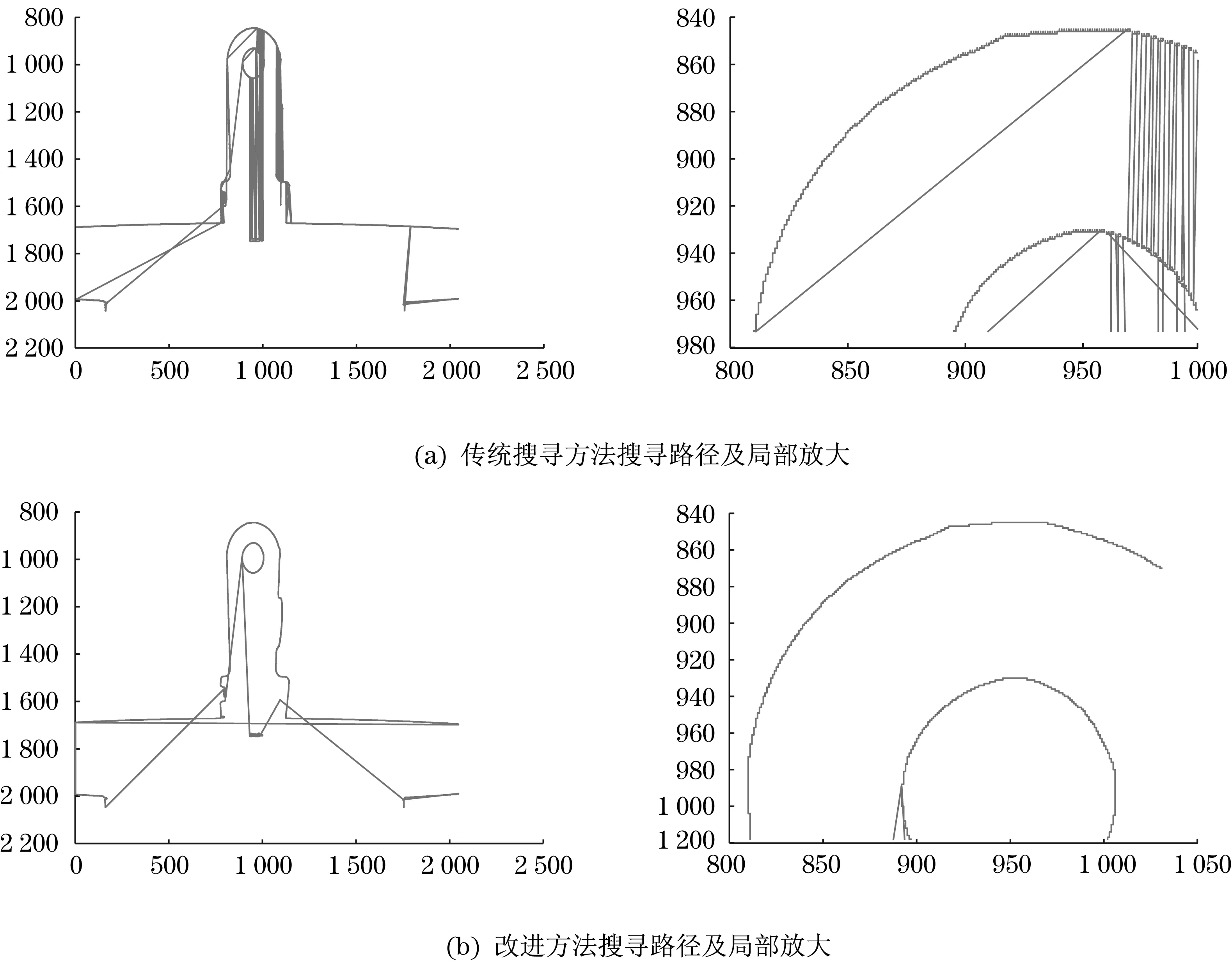
图3 轮廓点搜寻路径对比Fig.3 Contour point search path comparison diagram
3 轮廓跟踪
首先找到一个起始点,然后按照已得到轮廓的走势依次寻找轮廓坐标然后保存,这种方法称为轮廓跟踪法。轮廓跟踪法的具体步骤如下:
步骤1从起始点O(i,j)开始(初始值为(0,0)),判断O点的灰度值IO=1是否成立;否,进入步骤2;是,则点N(m0,n0),m0=i,n0=j,进入步骤3。
步骤2j=j+1,判断j=N+1是否成立。是,则i=i+1,j=1,执行步骤3;否,则执行步骤1。
步骤3判断i=M+1是否成立。否,则执行第一步;是,则结束。
步骤4将N(m0,n0)坐标存入n×2的矩阵M中,I置0;按照改进8邻域遍历追踪法判断点(m0,n0)的8个邻域内是否存在I(m,n)=1,是,则m0=m,n0=n,执行步骤4;否,则执行步骤1。
轮廓跟踪的流程图如图4所示。
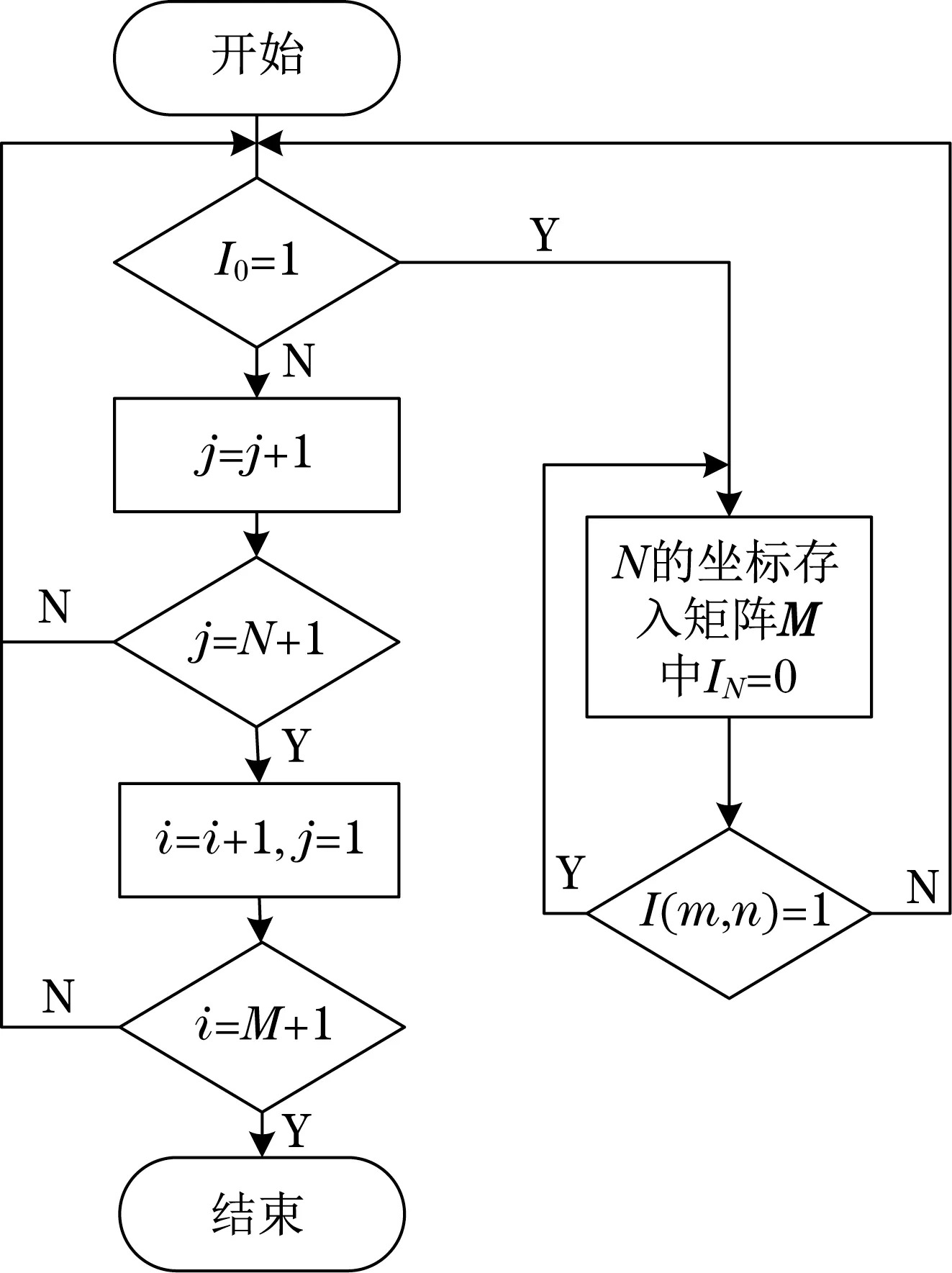
图4 轮廓跟踪法流程Fig.4 Contour tracking method flow chart
4 轮廓点二维坐标存储
在多幅图上截取关心的轮廓曲线,并顺次存储轮廓点二维坐标:
(1)对多幅X射线图像进行第一步和第二步操作,将每幅图像轮廓线顺序存储在mi×2的矩阵Mi中(i=1,2,…,n,n为X射线图像个数);
(2)在一幅图上找到关心的轮廓线,标记得到轮廓线的起始点S1和终点E1,选择S1和E1间的点,得到选中的轮廓线的点坐标集合P1;
(3)在不同图像上选取表示同一轮廓曲线对应的起点Si和终点Ei(i≤n),在二维矩阵mi中找到起点Si和终点Ei的位置,选择Si和Ei间的点,得到选中的轮廓线的点坐标集合Pi;
点集Pi(i≤n)即为所关心的轮廓线在不同角度图像上轮廓线点的坐标集合。
5 像素均分插值轮廓点匹配
得到轮廓线在不同角度图像上轮廓线点的坐标集合后,利用像素均分插值轮廓点匹配方法对不同角度图像上轮廓线对应点匹配,具体步骤如下:
步骤1对纵向像素点个数进行计数,得到第i幅图像纵向像素点个数zi(i=1,2,…,n),找出一个最大值zmax=max{z1,z2,…,zn};
步骤2按照轮廓线的走势顺次对轮廓线上每一层纵向zij上的横向像素点个数进行计数(i为图像序号,j为纵向像素点序号,j≤zmax),得到一个n×zmax的二维矩阵N,记录了不同图像相同轮廓线在相同纵坐标下像素点的个数;
步骤3求N矩阵每一行的最大值Nn+1=max{N1,N2,…,Nn};
步骤4根据Nn+1列的值对不同图像轮廓线同一纵坐标下的横坐标进行均分匹配,得到一个二维矩阵Q:
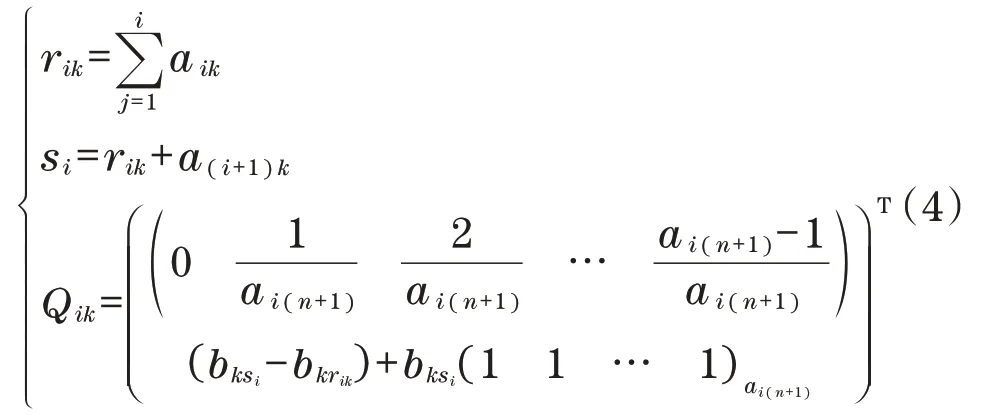
式中:k为图像编号(k≤n);aij为矩阵N中的第(i,j)个元素;bki为矩阵mk中的第i个元素。由式(3)可以得到矩阵Q(p×n),为n幅图中同一轮廓线上对应点匹配后得到的矩阵,其中p为轮廓线的最终点个数,n为图像数量。
基于像素点均分插值的多幅图像轮廓对应点匹配算法的流程图如图5所示。
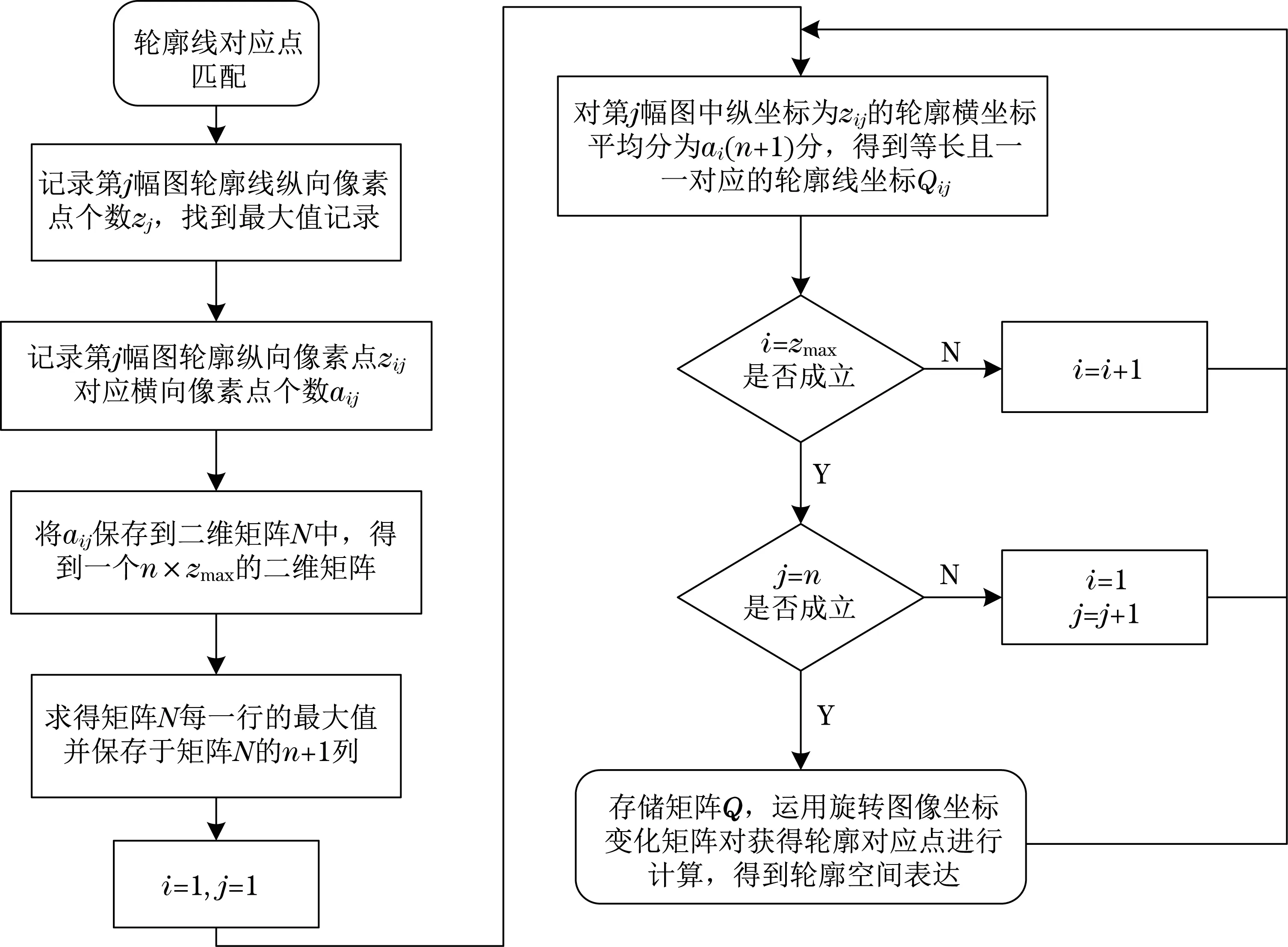
图5 多幅图像轮廓对应点匹配算法的流程Fig.5 Flow chart of point matching algorithm for multiple image contours
选取一段轮廓线进行实验验证,结果如图6所示。首先从不同图像上分别截取一段轮廓线,并存储轮廓线坐标;然后对轮廓线对应点进行匹配,得到轮廓线匹配矩阵;最后通过旋转图像坐标变化矩阵计算得到轮廓线三维坐标,其三维表达如图6(c)所示。进而验证了像素均分插值匹配方法的正确性。
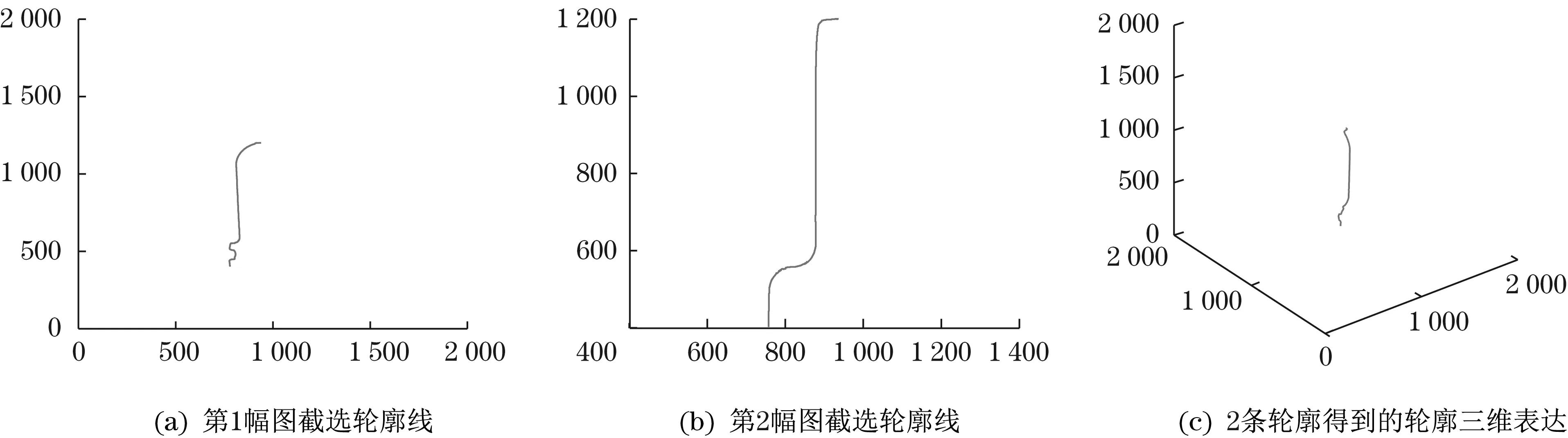
图6 截选轮廓三维表达Fig.6 The 3D expression of the cutoff contour
6 导线金具模型验证
6.1 X射线图像获取
利用实验室X射线图像采集设备进行零件的X射线图像采集,通过转动试验台,每次转动一个固定角度采集一次零件X射线图像,并记录该图像对应的转动角度。由此可以得到一组角度已知的零件X射线透视图像,如图7所示。
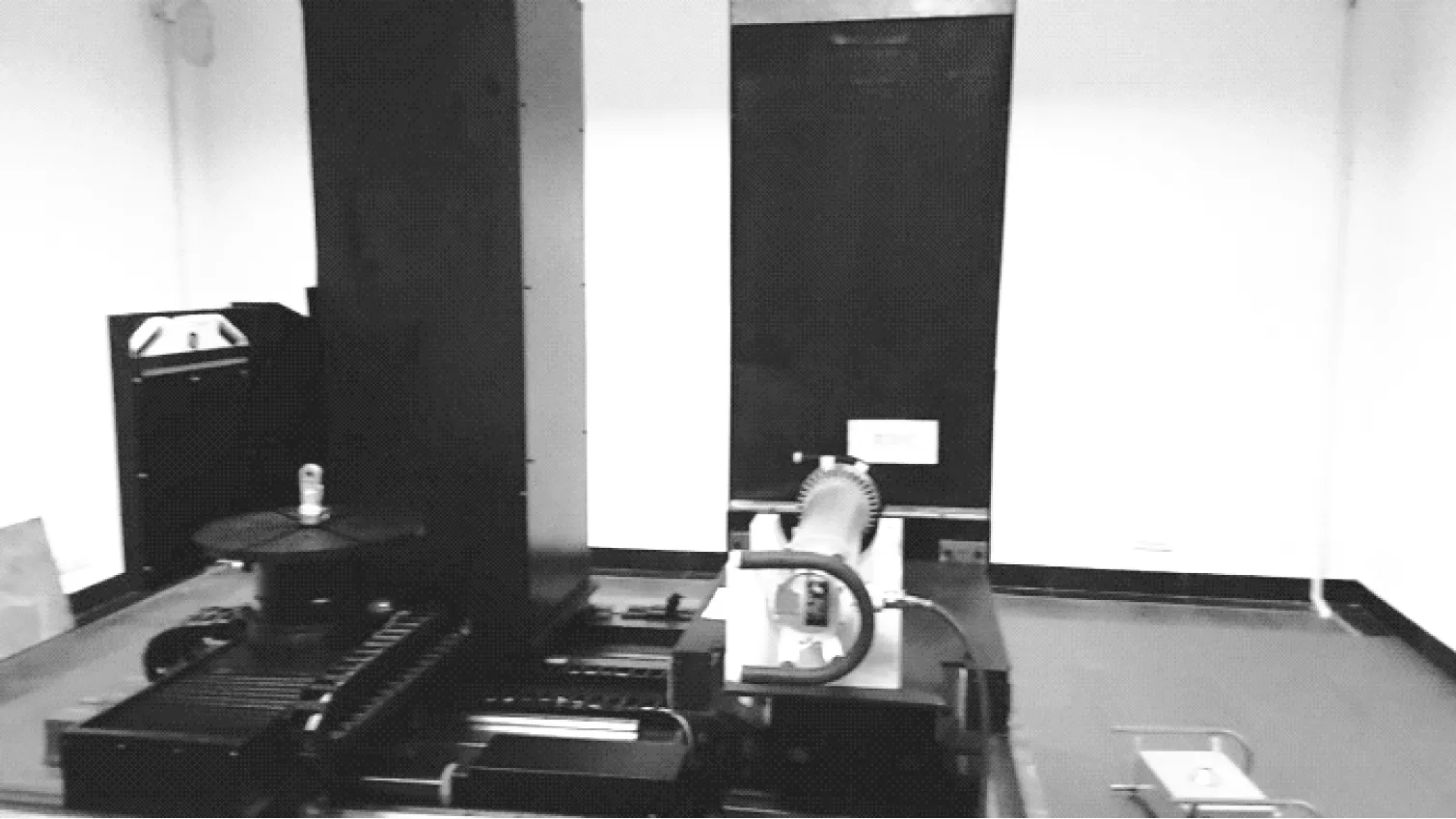
图7 拍摄实验台Fig.7 Shooting the experiment table
6.2 形状特征验证
将碗头挂板实物与三维重建结果进行对比,如图8所示。
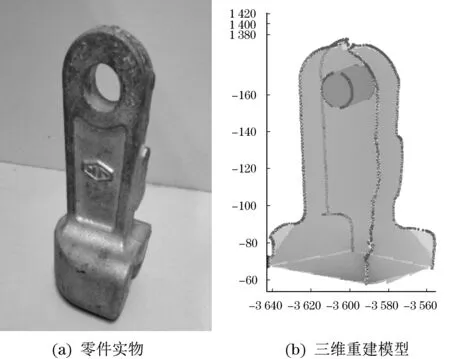
图8 重建结果对比Fig.8 Comparison of reconstruction results
通过两幅图对比,可以看到所建模型和实际零件在形状和结构上基本相同。其中挂板和通孔在模型中体现得较为完整和清晰,碗头在模型中也有所体现,模型总体达到建模要求。
6.3 尺寸误差验证
此处测量将计算零件的几个主要特征处的尺寸,有圆孔直径、外圆直径、挂板板厚、挂板板高(除碗头高度)、碗头宽度,如图9所示。
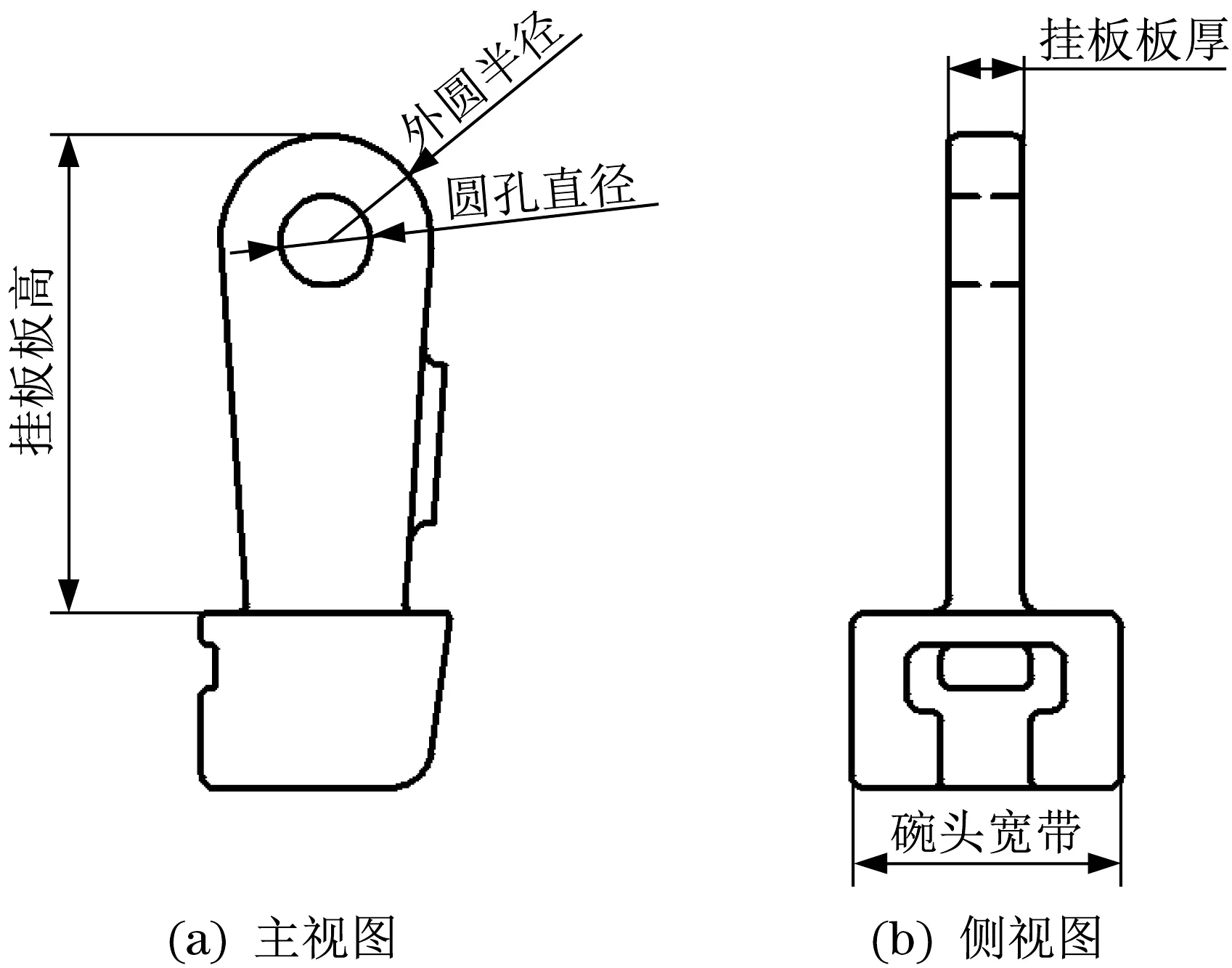
图9 主要特征Fig.9 Schematic of main features
对三维模型各个主要特征处的尺寸是通过软件建模后测得的该特征的取值范围,实际测量值是通过游标卡尺测得的零件的实际尺寸;通过对建模尺寸和实际尺寸做比较可得到模型的整体误差。表1为模型中的特征尺寸与实际尺寸的对比表。
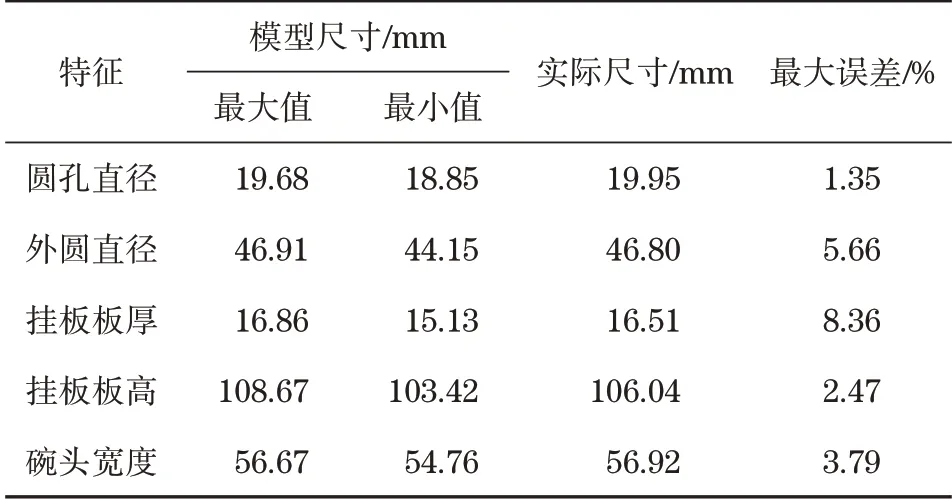
表1 已知角度建模方法所得三维模型误差表Tab.1 Errors of 3D models acquired by 3D reconstruction with angles
通过表1可知,三维重建模型的主要特征尺寸误差均控制在10%以内,证明本文提出的多幅X射线旋转图像轮廓对应点坐标提取和匹配方法基本符合要求。
7 结语
本文研究了一种多幅X射线旋转图像轮廓对应点坐标提取和匹配新方法,实现了在数字图像中提取目标轮廓并对多幅图像轮廓点进行匹配,提出了一种正交优先的8领域遍历追踪法,可以对目标图像轮廓点进行搜寻,还提出了一种像素均分插值轮廓点匹配方法,实现了不同图像上同一轮廓线的对应点匹配。
