隔震结构主动控制的控制效果分析
2022-11-08黄浩鸣
黄浩鸣
(佛山科学技术学院交通与土木建筑学院,广东 佛山 528000)
0 引言
结构主动控制是将控制工程与建筑结构相结合的技术,以实现结构振动的控制。从1972年开始,Yao开创了主动控制的先河。从工程应用来看,主动控制包括主动质量调谐阻尼控制(AMD)、主动支撑控制(ABS)和主动拉索控制(ATS),后两者合称为结构层间主动控制。
在结构层间主动控制方面,2017年孙洪鑫等人提出了拉索主动控制的时滞补偿方法。杨卫红等人针对一桁架结构,详细阐述了顶推主动控制技术。
在AMD控制方面,2015年刘彦辉等人针对广州电视塔的振动控制提出了直线电机驱动的主动质量阻尼器控制装置实现策略。郑晓君等人针对主动质量阻尼器控制系统的时滞现象提出了神经网络时滞补偿方法。
近几十年来,越来越多建筑采用了基础隔震的方案。但是经检测发现,多数隔震结构都会出现隔震层位移过大的问题。为了发挥隔震结构的优良性能,同时控制隔震层位移,该文提出将控制装置安装在隔震层的方案,并对其进行工程仿真分析。同时对比结构层间主动控制和AMD控制,分析两种控制方式的优缺点。
1 结构模型建立
基础隔震结构简化模型根据实际情况可以分为单自由度框架模型和两自由度框架模型。该文为了突出对结构隔震层的主动控制效果,采用了两自由度简化模型。结构层间主动控制和AMD控制的基础隔震结构如图1所示,且装置都安装在结构隔震层。

图1 主动控制的基础隔震结构
在不施加主动控制力的情况下,层间主动控制的隔震结构运动方程如公式(1)、公式(2)所示。
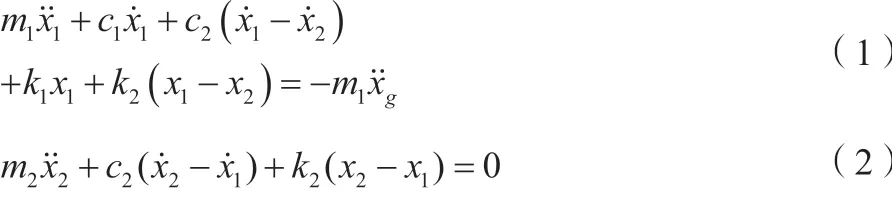
同样不施加主动控制力的情况下,AMD控制的隔震结构运动方程如公式(3)~公式(5)所示。


上述的运动方程用矩阵形式表达,如公式(6)所示。

施加主动控制力后,运动方程如公式(7)所示。

主动控制算法采用线性二次型(LQR)经典最优控制算法,确定控制参数的取值之后,便可求得状态反馈增益矩阵,最后得到最优控制出力,如公式(8)所示。


在此基础上对基础隔震结构进行工程仿真分析,分析结构层间主动控制和AMD控制装置安装在结构隔震层时基础隔震结构的地震反应。
2 结构工程仿真分析
通过matlab-simulink模块对图1的隔震结构进行工程仿真分析。结构参数见表1,前两阶模态阻尼比取==0.05。结构的阻尼按Rayleigh阻尼假设计算,由结构质量、刚度和前两阶结构的模态阻尼比确定,如公式(9)所示。

表1 结构参数表

式中:α和β为Rayleigh阻尼系数,可以用前两阶模态阻尼比确定。
为了更直观对比两种主动控制的方式,该文将AMD控制时的质量阻尼系数α取为0。
选取一条天然地震波Elcentro波作为地震动荷载输入进行结构反应分析,地震波峰值加速度取=9.8m/s,通过对比两种主动控制工况下结构隔震层和顶层的反应来分析两种主动控制方式的优劣性。结构层间主动控制和AMD控制情况下,结构隔震层、顶层的动力反应、控制出力和AMD质量块行程曲线如图2所示。两种工况下结构反应的峰值及减震率、控制出力峰值和AMD质量块的行程峰值见表2。
从图2和表2可看出,无论是结构层间主动控制还是AMD控制,都对基础隔震结构有显著的减震效果,其中位移反应减震效果最明显,速度反应次之,然后是加速度反应。且结构层间主动控制比AMD控制达到的减震率高,结构层间主动控制的减震率最高达到94.03%,AMD控制的减震率达到62.29%。说明在同样的控制算法参数的条件下,结构层间主动控制更容易达到理想的控制效果,而AMD控制则要较大的质量块质量和质量块行程才能达到和结构层间主动控制同样的控制效果。
结合图2和表2可知,结构层间主动控制所需要的控制出力是高出AMD控制很多的,结构层间主动控制最高达到8 258.99 kN,AMD控制达到4 096.55 kN,层间主动控制是AMD控制的2倍以上,而AMD控制同时也给质量块提供了一定的行程距离,最高达到28.89 m。表明同样参数条件下,AMD控制所需要的控制出力比结构层间主动控制要少,同时需要一定的行程距离。

表2 结构反应峰值及减震率
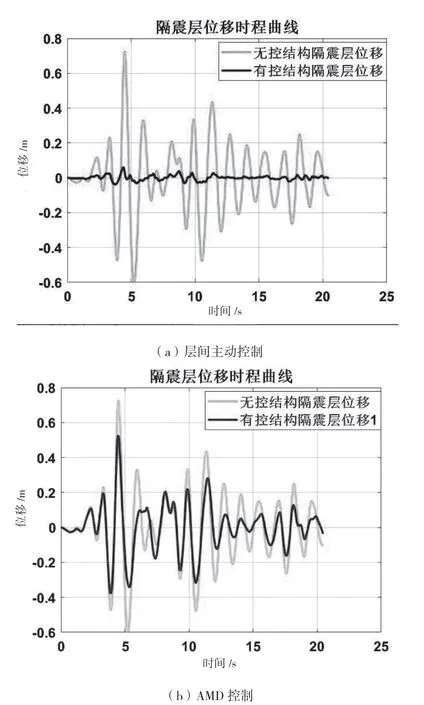
图2 位移反应时程曲线
综上所述,无论是结构层间主动控制装置还是AMD装置,安装在基础隔震结构的隔震层都有较好的减震控制效果。在结构反应控制效果相同的情况下,结构层间主动控制需要输出较大的控制力,而AMD控制则需要提供较大的质量块行程。在一般情况下,要想结构振动控制效果达到最优,结构层间主动控制需要在结构每层都布置控制装置,加上该控制方法本身需要施加更大的控制力,因此需要提供更多的能源去支持实现最优控制力,而AMD控制则只需在结构隔震层布置装置便可接近最优的控制效果,但是AMD装置需要给质量块提供一定的行程范围,因此需要占用该层的使用空间。具体的隔震结构可根据实际工程需要和工程条件来决定采用哪种主动控制方式。
将结构层间主动控制和AMD控制的控制出力数值与隔震层速度数值相除,得出控制力与速度的相关性比值。结构层间主动控制和AMD控制的控制力-速度相关性时程曲线如图3所示,其中正值代表控制力与隔震层速度方向相同,负值代表方向相反。
从图3可知,对结构层间主动控制,控制力与隔震层速度的相关性较强,且大部分控制力与速度的方向相反,只有少部分方向相同,说明结构层间主动控制的控制力与隔震层速度主要呈负相关性。而对AMD控制,控制力与隔震层速度没有明显的相关性,且控制力与速度的方向也没有明显的正反关系,说明AMD控制的控制力与隔震层速度并没有直接的联系。
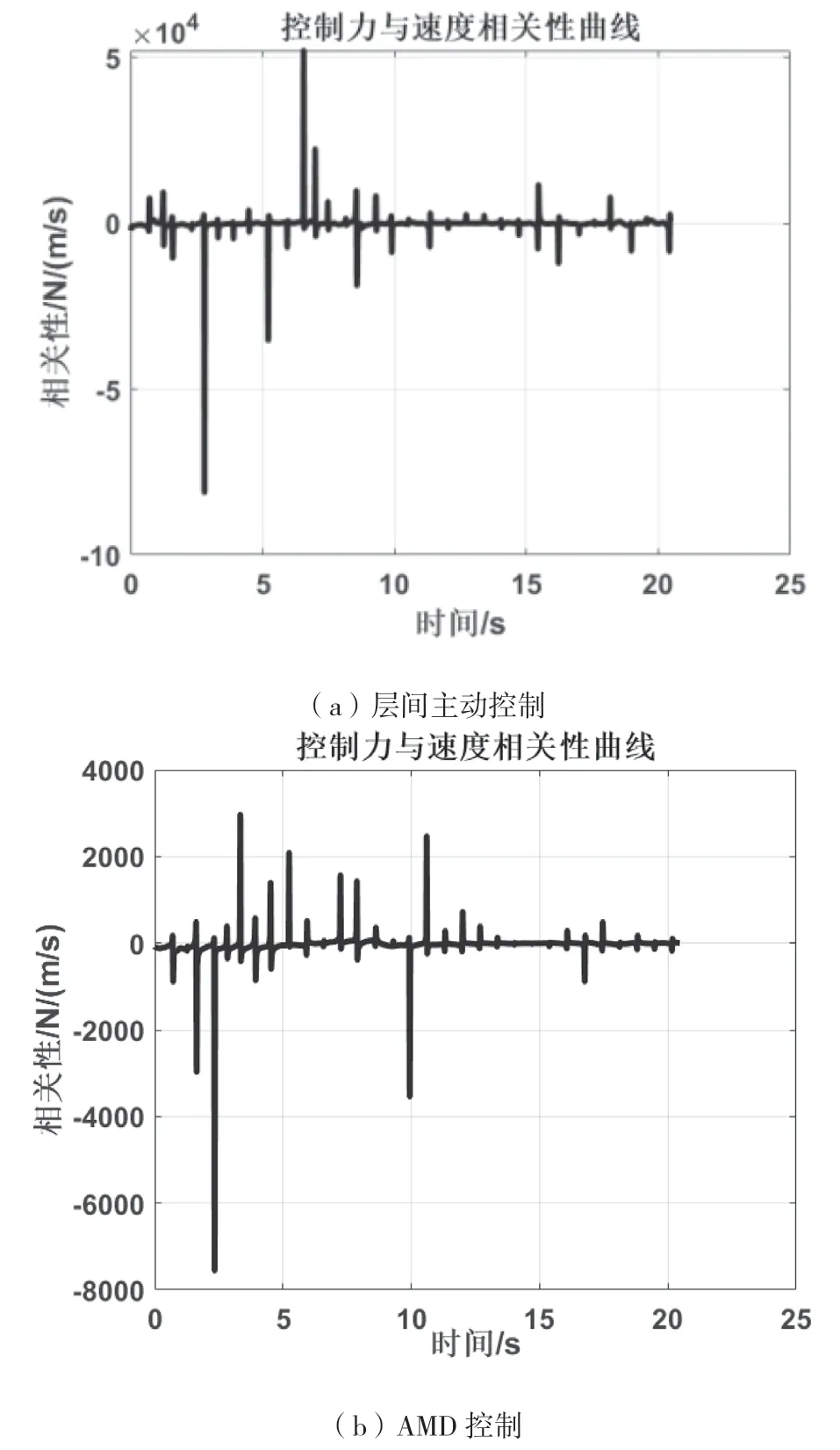
图3 控制力与速度相关性时程曲线
两种主动控制方式的控制力与隔震层速度相关性有较大的差别,原因在于两者的主动控制力作用在结构的形式不同。结构层间主动控制输出的控制力主要是以阻尼力的形式施加在结构上。当控制装置安装在隔震层,且控制装置发挥控制作用的时候,隔震层就相当于被额外附加了阻尼力,等效于给隔震支座提高了阻尼系数,进而起到了减震效果,提高了隔震结构中隔震层的耗能能力。而阻尼力本身与速度相关,因此结构层间主动控制的控制出力跟隔震层速度有较强的关联性,且主要呈负相关性。但控制装置安装在上部结构的时候控制效果反而不明显,这是因为隔震结构发挥控制作用的主要部位是在隔震层,给上部结构附加阻尼力效果不明显。而AMD控制输出的控制力主要由驱动力、阻尼力和刚度力3种形式构成,其中驱动力的比例最大。当AMD装置无阻尼无刚度时,控制出力主要是以驱动力的形式施加在结构上,因此当质量阻尼系数α取为0(即AMD控制装置无阻尼无刚度)时,安装在结构隔震层的控制装置主要以驱动力作用在隔震层上,通过驱动力的作用直接将隔震层的反应控制下来,进而控制整个结构的反应,进而起到减震的作用,而驱动力和速度的相关性并不大,因此AMD控制的控制出力跟隔震层速度没有直接的关联性。而且AMD控制装置安装在上部结构顶层的时候控制效果也同样明显,因为此时AMD装置提供的驱动力将整个隔震结构中振动反应最大的位置控制了起来,顶层以下的振动反应也间接被控制起来,进而达到了和控制装置安装在隔震层接近的控制效果。
3 结论
针对隔震结构隔震层位移过大问题,该文采用主动控制技术来限制隔震结构反应,通过控制装置安装在结构隔震层,对基础隔震结构进行了工程仿真分析,得出结论如下:1) 无论是结构层间主动控制还是AMD控制,控制装置安装在结构隔震层时,都对整个结构有良好的控制效果,其中位移控制效果最好,速度次之,然后是加速度。2) 在同样的控制效果下,结构层间主动控制所需要的控制出力更大,因此需要提供更多的能源去支持实现最优控制力,而AMD控制则要提供较大的质量块质量和行程,因此需要占用该层的使用空间。具体的隔震结构可根据实际工程需要和工程条件来决定采用哪种主动控制方式。3) 结构层间主动控制的控制力主要是阻尼力的形式,与隔震层的速度呈负相关性,而且控制装置安装在上部结构时控制效果没有安装在隔震层的控制效果明显。AMD控制的控制力主要是驱动力的形式,与隔震层的速度没有直接的关联性,而且控制装置安装在上部结构顶层时控制效果与安装在隔震层的控制效果接近。4)主动控制目前在隔震结构的应用比较少,而控制装置安装在隔震层更是少之又少,尤其是在高层结构中,因此该文的控制方案有较大的应用前景,有一定的研究价值。