非线性系统有限时间自适应动态面容错控制
2022-11-07李应森王焕清彭开香
李应森 ,陈 明 ,王焕清 ,彭开香
(1.辽宁科技大学电子与信息工程学院,辽宁鞍山 114044;2.渤海大学数学科学学院,辽宁锦州 121013;3.北京科技大学自动化学院,北京 100083)
1 引言
随着社会经济与科学技术的飞速发展,控制系统尤其是非线性控制系统的规模及复杂程度日益加大,其分析与设计也不断面临更高的要求与挑战.由于非线性系统广泛存在于自然界及人们的生产生活中,因此有效提高其控制精度、响应速度及可靠性具有十分重要的理论价值及实际意义,而先进的控制理论与方法便是提高系统控制性能的强有力工具[1-3].
一方面,控制系统的可靠性和安全性是确保系统能够工作的前提和基础.系统中的某些元件(如传感器或执行器)一旦发生故障,轻则使得系统的控制精度下降,重则引起系统不稳定,造成重大的经济损失甚至人员伤亡.容错控制为解决这一问题提供了一条有效途径[4-6].传感器作为控制系统中必不可缺的重要组成部分,对其发生故障后进行容错控制研究一直以来都是众多学者的研究热点,目前已取得很多有效的容错控制方法.文献[7]利用反步法,针对一类多输入多输出非线性系统设计其传感器故障下的容错控制器,实现故障下系统中所有信号是半全局一致最终有界的.文献[8]提出了一种容错控制器,通过观测器模糊自适应技术实现对故障的补偿,有效地解决了传感器故障问题;另一方面,提高系统的快速性也是控制系统设计中另一个重要课题.有限时间控制的主要优势就是使控制系统在有限时间内收敛到平衡点,同时具有鲁棒性及抗扰能力强、控制精度高等特点,该控制方法对提高系统快速性具有重要意义,已引起众多学者的广泛关注.文献[9]系统全面地阐述了非线性系统有限时间稳定的定义、判据定理以及研究进展.文献[10]针对一类受扰的故障非线性系统,利用有限时间理论提出了一种故障检测与估计策略.文献[11-12]分别探讨了非线性系统的自适应有限时间容错控制及有限时间分散控制问题.文献[13]针对航天器姿态模型,利用滑模控制及齐次系统等理论,实现航天器姿态有限时间稳定.
近些年来,反步法已成为非线性系统设计的有力工具.然而,在传统的反步法中,存在计算复杂等问题,如需要对其虚拟控制律反复求导数.动态面控制技术可以解决上述问题,并已取得很多相关成果[14-15].
基于上述研究成果,本文拟针对具有传感器故障的一类严格反馈非线性系统,设计一种有限时间自适应动态面容错控制方法.其主要贡献为:1)本文考虑的故障模型,涵盖了传感器固定偏差故障、漂移故障、精度下降及失效故障4种类型.传感器是否发生故障或发生何种类型故障,所设计的控制器均能保证系统在原点处是半全局实际有限时间稳定的,且跟踪误差收敛于坐标原点的小邻域内.2)该方法与文献[7,16]相比,兼顾了系统的可靠性、快速性、鲁棒性及抗干扰性,即结合了有限时间理论、容错控制及模糊逻辑控制等设计控制器.3)本设计方法以反步法为主要设计依据,并利用模糊逻辑系统处理模型中的未知函数.4)通过采用动态面控制技术解决了传统反步法中计算复杂问题.
2 问题描述及预备知识
2.1 问题描述
考虑如下一类严格反馈非线性系统:
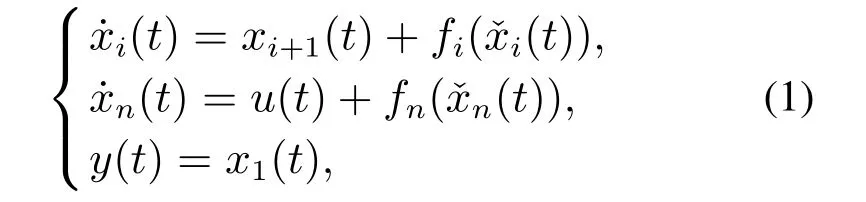
其中:xi(t),i=1,2,···,n,u(t)∈R,y(t)∈R分别表示系统的状态变量、输入变量和输出变量;状态向量(t)=[x1(t)x2(t)··· xi(t)]T∈Ri;fi(·)表示未知的光滑函数.
考虑到传感器发生故障,其模型可以表示为

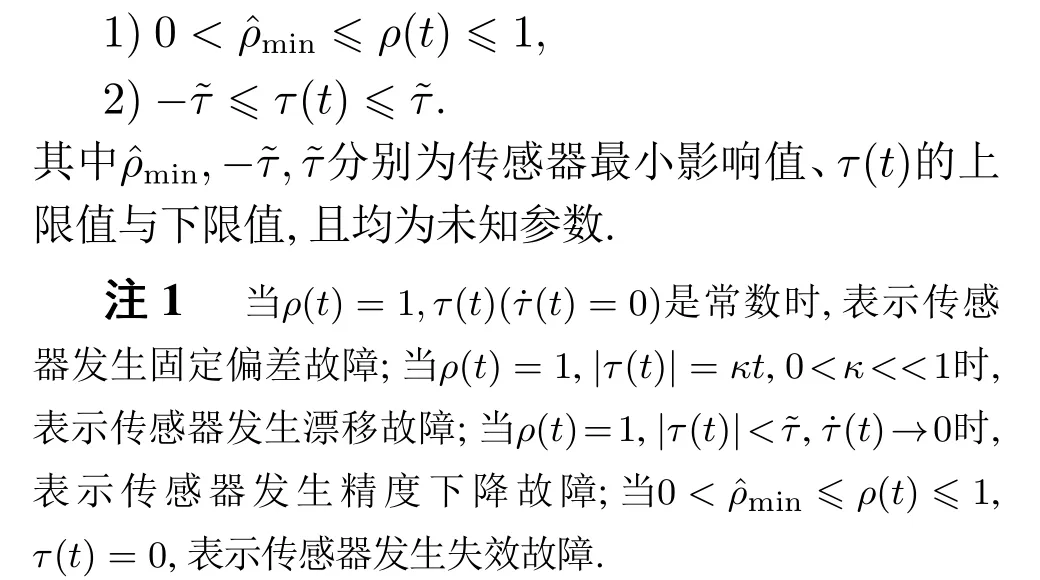
其中ρ(t),τ(t)代表传感器故障参数,描述如下:
本文的控制目标:
1)该系统是半全局实际有限时间稳定的;
2)传感器无论发生故障与否,均能确保系统的输出信号在有限时间内跟踪期望信号yr(t),定义跟踪误差s1(t)=yf(t)-yr(t)收敛于零的小邻域内;
3)闭环系统中全部信号是半全局一致有界.
2.2 预备知识
假设1期望输出信号yd连续、n阶可导且有界.
为书写方便,以下所有时间变量t均略掉.
3 所提方法
本文主要基于反步法,将有限时间控制、模糊逻辑控制、动态面控制及容错控制相结合,为系统(1)设计一个有限时间自适应动态面容错控制器.
定理1针对系统(1),满足假设条件1,若发生形如式(2)所示的传感器故障,设计如下的虚拟控制律αi、实际控制律u:
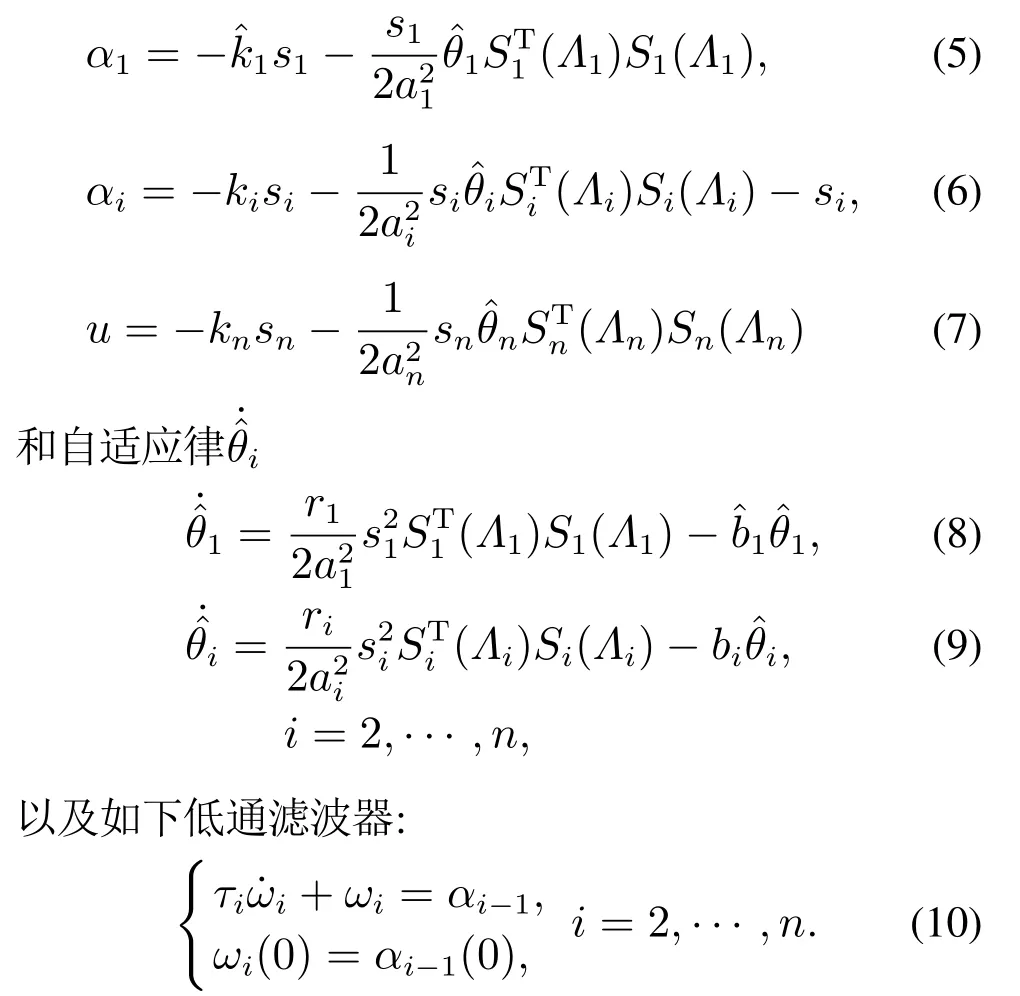
整个设计过程分为n步,均利用如下坐标变换:

并定义滤波器的输出误差ei为

步骤1首先,由式(11)-(12),得到

在第1步设计中,首先选择的李雅普诺夫函数为

求Vs1的一阶导数,得
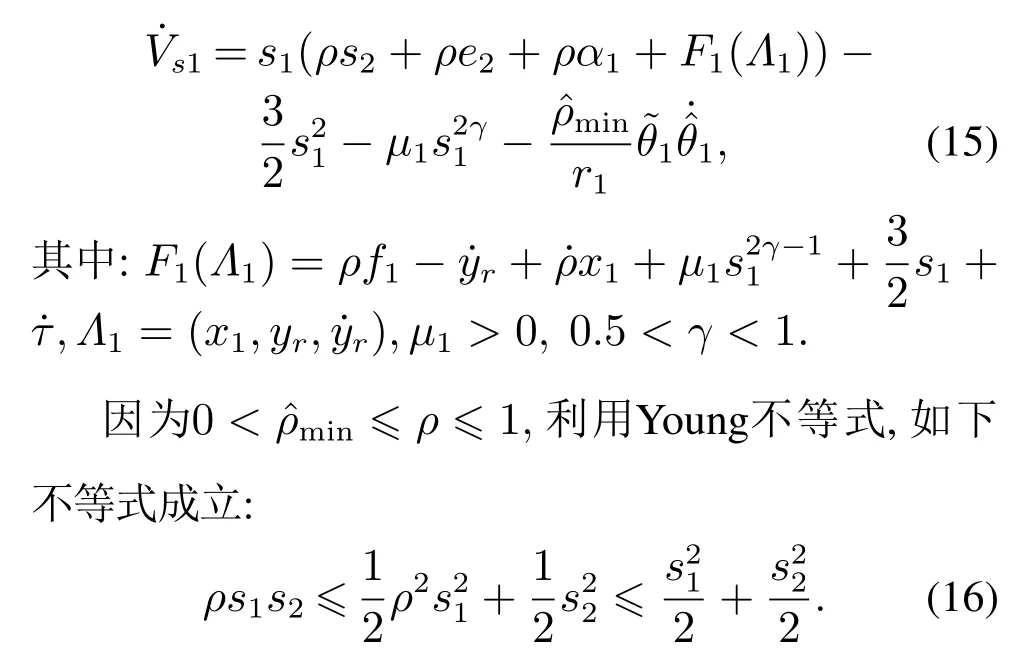
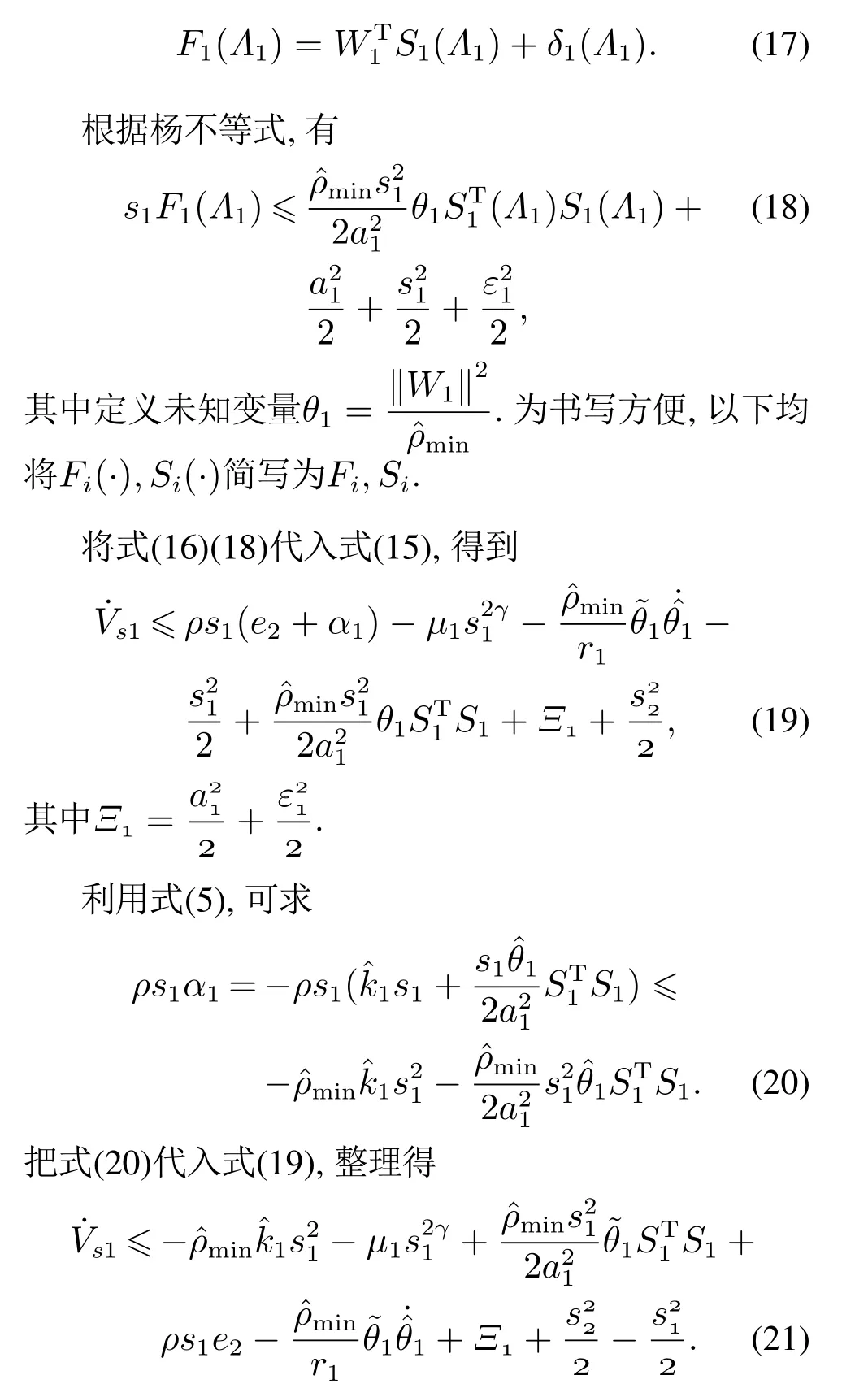
在式(15)中,F1(Λ1)是未知的非线性函数,本文通过模糊逻辑控制对其进行逼近,如式(17)所示:

根据动态面控制策略,对虚拟控制信号α1进行滤波,由式(10)和式(12),可推导出

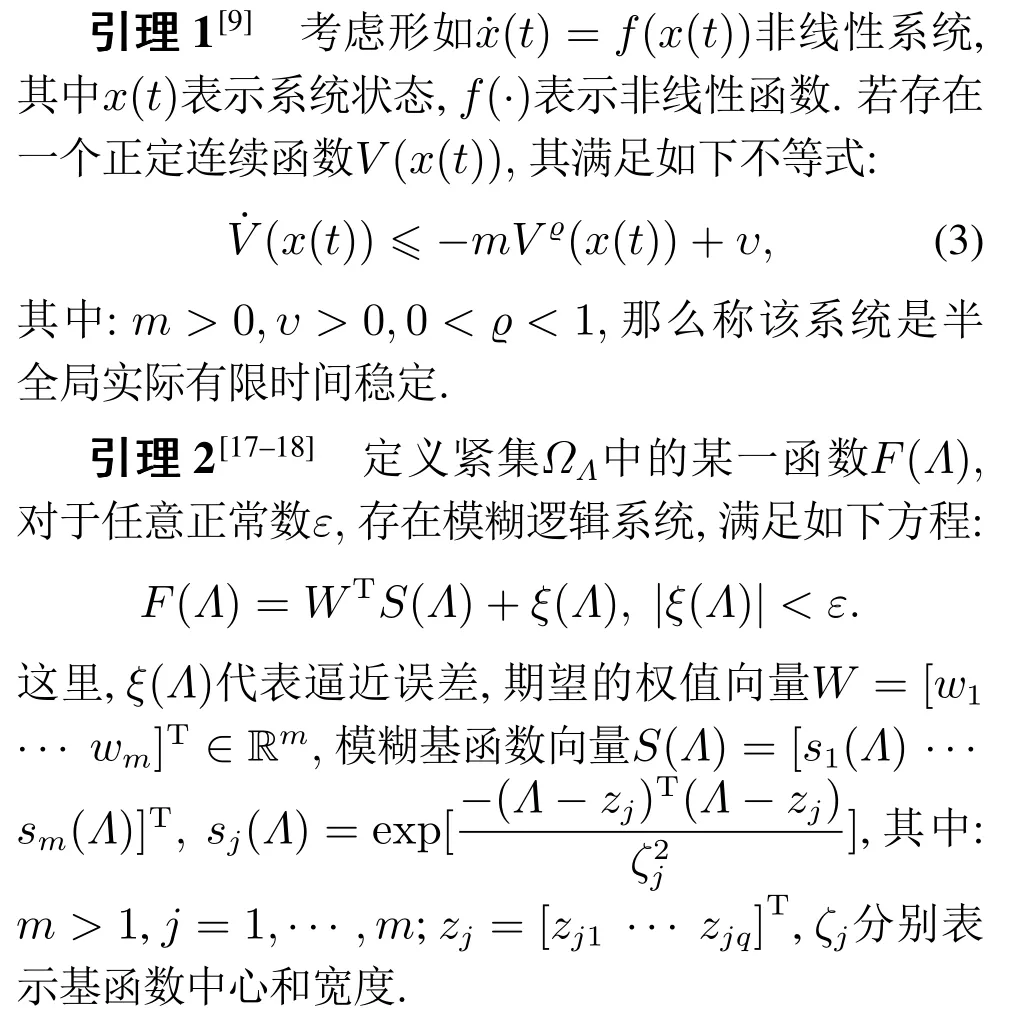
根据引理1,利用所设计的上述控制器,使系统(1)满足式(57)所描述的条件,则该系统在原点处是半全局实际有限时间稳定.
定理2系统(1)在原点处是半全局实际有限时间稳定,其跟踪误差能在有限时间内收敛到原点附件的小邻域里,且收敛时间ts的上限值为

其中:
注3定理2的结论主要依据引理1及其所引文献[21-22]所得,具体证明过程可参看相应文献,此处不再赘述.
4 仿真验证
为了进一步验证所提出设计方案的有效性,下面通过一个数值仿真示例加以验证,以如下二阶非线性系统为研究对象:

其中:f1=0.01 sinx1cosx1+0.05 sinx1,f2=x1cosx2.系统的初始状态为x(0)=[x1(0)x2(0)]T=[0.5 0.5]T.控制目标是在有限时间内,无论发生故障与否,均使得系统实际输出与期望输出信号的偏差收敛于原点附近的小邻域内.设理想跟踪信号为yr=sint,满足假设条件1.具体故障情况考虑如下:
1)传感器发生固定偏差故障

2)传感器发生失效故障
传感器发生固定偏差故障时其仿真结果如图1-图4所示.从图1可知,从t=9 s开始,状态x1发生固定偏差故障.图2给出了在本文控制器作用下实际输出与期望输出的跟踪效果图,相应的跟踪误差曲线如图3所示,图4表示其控制输入随时间变化的曲线.在控制器及其设计参数不变的情况下,传感器发生失效故障,如图5所示.图6-图8分别表示在该控制器作用下系统的跟踪曲线、误差曲线和控制输入u的轨迹图,自适应参数,的时间变化曲线如图9所示.从以上仿真曲线可以看出,无论传感器发生故障与否,发生何种故障类型,本文提出的设计策略均能保证系统在坐标原点处是半全局实际有限时间稳定的,且使得系统的跟踪误差收敛于原点附近的邻域,从而获得较好的控制效果.

图1 情形1-传感器(状态x1)发生固定偏差故障Fig.1 Bias fault of sensor(x1)
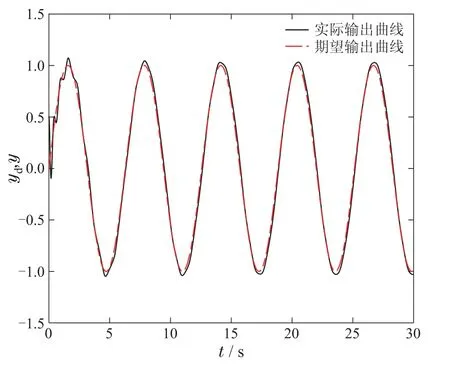
图2 实际输出y和期望输出yd的响应曲线(情形1)Fig.2 Response curves of practical output y and desired output yd (Case 1)
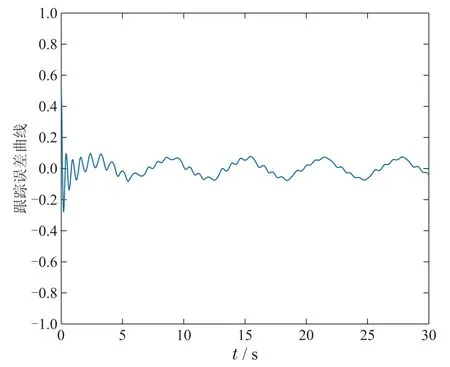
图3 跟踪误差响应曲线(情形1)Fig.3 Response curve of tracking error(Case 1)
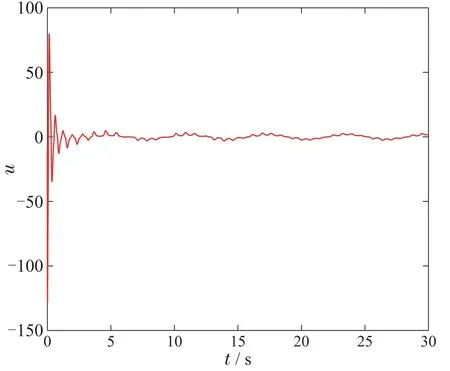
图4 控制输入u响应曲线(情形1)Fig.4 Response of control input u(Case 1)
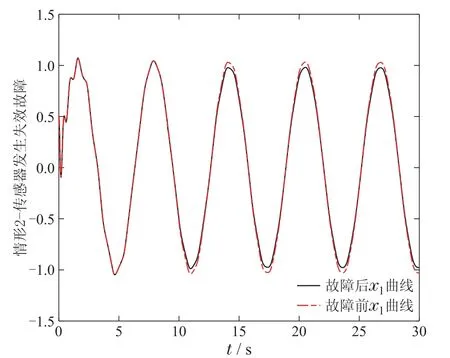
图5 情形2-传感器(状态x1)发生失效故障Fig.5 Loss of effectiveness fault of sensor(x1)

图6 实际输出y和期望输出yd的响应曲线(情形2)Fig.6 Response curves of practical output y and desired output yd (Case 2)
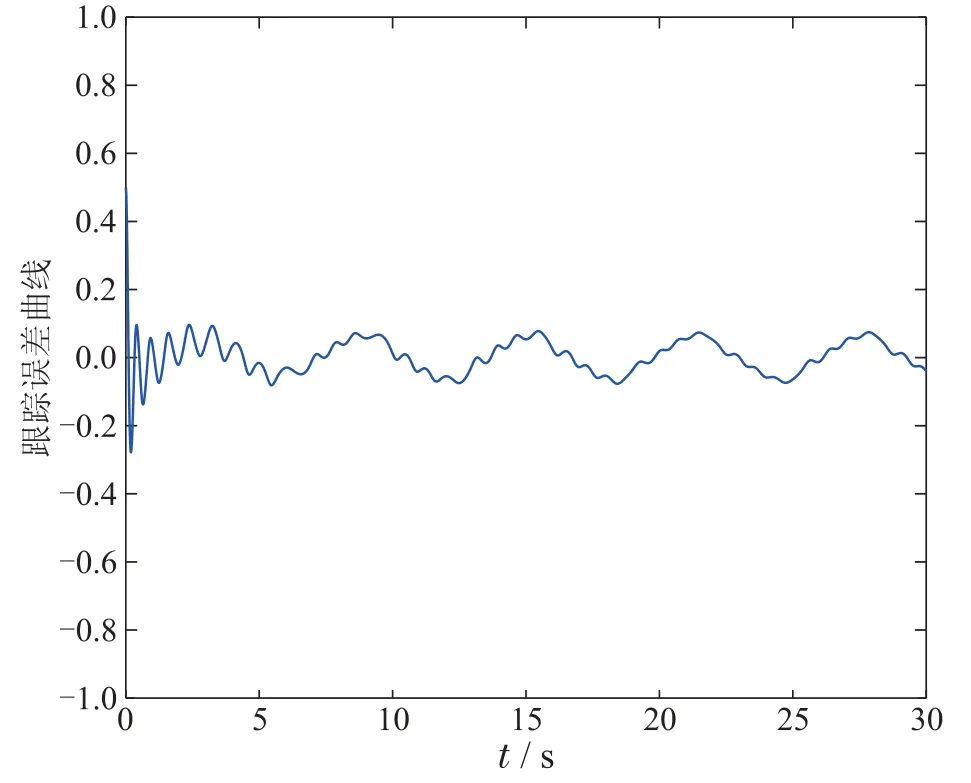
图7 跟踪误差响应曲线(情形2)Fig.7 Response curve of tracking error(Case 2)
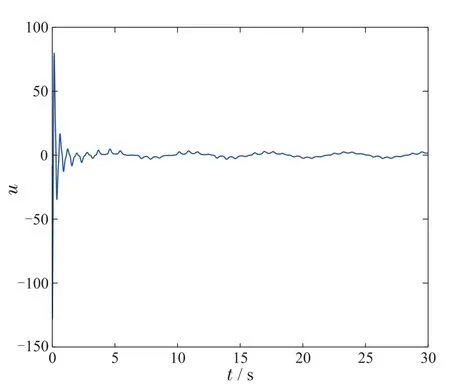
图8 控制输入u响应曲线(情形2)Fig.8 Response of control input u(Case 2)

图9 自适应参数,时间变化曲线(情形2)Fig.9 Time curves of adaptive parameters , (Case 2)
5 结论
本文针对具有传感器故障的一类严格反馈非线性系统,利用反步法设计一种有限时间自适应动态面容错控制算法.通过模糊逻辑系统逼近系统中的未知函数,并基于自适应技术对系统中可能出现的多种传感器故障进行估计,补偿故障对系统造成的影响.为了解决传统反步法中的积分爆炸等复杂问题,引入动态面控制方法,并结合有限时间理论及容错控制等,兼顾系统的快速性、鲁棒性及抗干扰性.所设计的控制器在系统传感器有无故障的情况下,均使得其跟踪误差在有限时间内收敛于原点的小邻域.然而,文中给出的收敛时间上限表达式不仅与系统初始状态有关,还因其包含未知项导致无法计算.该问题是目前经典自适应控制、有限时间理论与模糊控制、神经网络控制相结合相关成果中存在的一个专业性、公开性问题.在今后研究中,拟将对此问题做深入探索.
