具有Preisach类型磁滞输入的不确定非线性系统自适应神经网络控制
2022-11-07邱伟文赖冠宇
邱伟文,赖冠宇,章 云
(广东工业大学自动化学院,广东广州 510006)
1 引言
近年来,随着智能材料的迅速发展,大量的智能材料被广泛应用于光学工程、航空航天、生物工程、微电子工程等领域,比如:人造肌肉、形状记忆合金、电流变液等[1-3].其中,磁致伸缩材料、压电材料和形状记忆合金等智能材料,除了其具有的内置感知、驱动等能力外,材料自身存在的磁滞现象严重阻碍着它们在传感器和执行器中的有效应用,给许多不具备磁滞容纳能力的非线性受控系统在性能上带来极大影响[4-5].磁滞非线性是一种包含历史输入信息的非线性特性,即系统的输出不仅取决于当前的输入,还与历史输入信息有关.而对于超精密定位系统而言,磁滞非线性不仅降低了其控制精度,在不具备复杂磁滞处理能力的情况下甚至会出现与输入信号幅度相关的相位移和谐波失真问题,导致系统不稳定,因此,智能材料的磁滞特性是控制系统研究的重要领域.
目前,对磁滞的处理首先是使用一个能够描述磁滞非线性行为的模型并且能用于磁滞补偿控制设计.其中,Jiles-Atherton模型[6]是一种基于物理机理的模型,认为磁滞现象来源于材料缺陷位置畴壁之间的相互作用;Bouc和Wen提出的Bouc-Wen磁滞模型[7]是一种微分模型,也是广泛接受的现象学模型之一,但在求解磁滞的逆上十分困难,只能表示单环磁滞,无法用来表示多环磁滞;Preisach模型[8]最初是由德国物理学家Preisach于1935年提出的物理模型,后经数学家Krasnosel’skii扩展为纯数学模型,扩大了Preisach模型的应用范围;Ge等人[9]基于经典Preisach模型提出了一种广义Preisach模型;Prandtl-Ishlinskii(PI)模型是一种基于play算子与stop算子叠加的现象学模型,其数学描述上是由阈值变量参数化后的算子加权的单积分形式,在一定程度上可以认为PI模型是Preisach模型的一种特殊形式[10];Krasnoselskii-Pokrovskii(KP)模型[11]与Preisach模型相似,是许多KP磁滞单元通过加权重叠组成的;类Backlash模型[12]结构简单,但仅适用于磁滞形状一定的情况.经过各种模型综合比较,考虑Preisach模型有着充分的数学特性研究[13]和适应范围广等优点,具有Preisach类型磁滞输入约束与不确定非线性系统结合的控制器设计问题具备十分重要的研究价值.
对磁滞非线性的逆补偿研究中,通常的方法是在反馈控制器设计中引入磁滞逆模型以减少磁滞影响,但由于输入信号隐式包含在模型中,关于模型逆结构的研究引起了广泛关注,同时,在Preisach逆模型的存在性的合理假设下,出现了查表程序法、定点迭代方法、二等分法、最匹配算法等Preisach的逆方法[14-17].但是,由于Preisach逆模型的存在性与系统的不确定性问题,在系统设计中结合逆模型作为前馈补偿器的方案难以保证闭环系统的稳定性.另一类方法是通过自适应控制设计方法,构建多个参数进行估计,同时利用李雅普诺夫稳定性理论证明其稳定性,一般证明得其Lyapunov函数具有(t)≤-aV(t)+b的不等式形式,其中a,b是正常数,而放缩遗留项b的存在一般来源于控制器设计中采用杨氏不等式放缩,对控制性能仍带来误差影响[18].此外,过多的参数估计也会带来巨大的计算负担.因此,保证采用Preisach磁滞表示的非线性闭环系统稳定的控制器设计问题仍然是文献中具有挑战性的问题.
本文针对一类具有Preisach类型磁滞输入的不确定非线性系统,提出采用Preisach 算子分解方法与Backstepping控制方式进行自适应神经网络设计的方法.所设计的控制器能够实现在有限时间内准确跟踪受磁滞影响的期待信号,保证了闭环系统信号的有界性.与其他文献相比,本文的创新点在于:
1) 相较Bouc-Wen、类Backlash 等模型,Preisach模型在磁滞表示上更具灵活性,过去对磁滞的研究主要通过构建磁滞逆模型的方法对磁滞进行抑制和补偿,但由于磁滞与系统非线性动态之间的耦合,逆的存在性及Preisach算子的复杂性等问题,构建磁滞逆模型的方法十分困难.因此,为了避免构造Preisach模型的逆,本文考虑采用磁滞模型的非线性分解,新公式中明确表示输入信号,并将其与Backstepping迭代控制设计相融合,为严格反馈不确定非线性系统设计了一种自适应的执行器磁滞补偿控制方案,能够保证闭环控制系统信号的有界性,使得输出跟踪误差渐近收敛到用户预设范围内;
2) 使用一类降阶光滑函数用于控制器设计,其不仅能够解决控制器由于信号不连续或者对跟踪误差符号变化敏感而带来的抖动问题,而且用户能够根据预设控制参数实现预设性能的有效跟踪;
3) 采用Lyapunov函数的时间导数是负定的,在控制器设计中引入径向基神经网络近似方法,抵消系统中的部分非线性及由Preisach模型离散化程度等带来的干扰影响,所设计控制器包含的自适应估计参数只有一个,其不仅降低了控制系统计算复杂度,并且避免了由于控制参数过多所带来的耦合问题,从而大幅度扩大了方案的应用范围.
本文剩余部分安排如下:第2部分阐述具有磁滞非线性的严格反馈非线性系统与预备知识;第3部分是对具有磁滞约束的非线性系统进行Backstepping自适应控制设计及稳定性分析;第4部分是通过仿真与实验研究验证所提方法的有效性;第5部分是本文的结论部分.
2 被控对象描述与预备知识
本节作者将给出所研究被控对象的状态空间描述,以及关于Preisach磁滞算子与径向基函数神经网络的预备知识.
2.1 被控对象的数学模型
考虑具有如下严格反馈形式的不确定非线性系统:
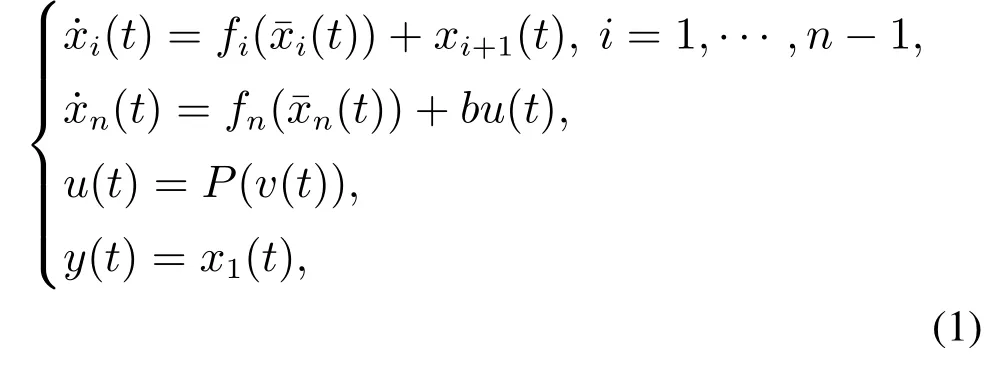
控制目标:针对具有未知Preisach磁滞输入的非线性系统(1),寻求一种合适的控制策略v(t),使得闭环控制系统具备如下性能:
1) 闭环系统的所有信号均有界;
2) 系统的输出跟踪误差z1(t)=y(t)-yd(t)渐近收敛至预设区间[-δ1,δ1],即当时间t趋于无穷,有-δ1≤z1(t)≤δ1,其中yd(t)表示期望跟踪信号,δ1>0为用户预设的常值参数.
针对上述控制目标,本文给出如下常用假设条件.
假设1参考信号yd(t)∈R及其各高阶时间导数y(i)d(t),i=1,···,n均为已知的有界函数,且定义其中y0为有界的正常数.
假设2系统控制增益的符号已知,且满足条件0<bm≤sgnbb≤bM<∞,其中bm,bM为未知的正常数.
2.2 Preisach磁滞模型
根据文献[19],经典Preisach模型可视为由无数个继电器算子的权重叠加所构成,即

μ(α,β)为密度函数(亦称Preisach函数或权重函数),为对应于Preisach平面上(α,β)点的继电器算子,其表达式如下:

其中:β和α是Preisach平面上决定迟滞算子继电器开关的阈值,t-=代表t时刻前一瞬间.图1为Preisach算子的几何解释,能动态表示Preisach平面上多值继电器滞后核的分布,α-β平面三角形区域内非阴影部分为=-1的分布,阴影部分为=+1的分布.
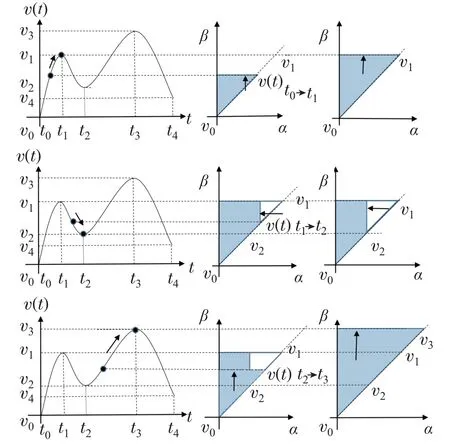
图1 Preisach算子的几何解释Fig.1 Geometric interpretation of the Preisach operator
受文献[20]对Preisach模型分解的启发,将u(t)表示为以下的一般模型:

在上式中v(t)为实际控制输入,μ0(t)为大小未知的控制增益,d(t)作为附加项,同时μ0(t)与d(t)满足如下特点:

注1采用式(2)的Preisach算子可精确描述磁滞环非线性约束,但真实控制信号v(t)将被隐含在继电器算子之中,给控制器设计造成极大困难.为解决此问题,与文献[20]方法类似,本文考虑对Preisach模型进行非线性分解,成功将控制信号提取并建立其显式表达式,如式(4)所示,其中控制增益μ0(t)和类扰动项d(t)均有界,为后续控制设计及稳定性分析奠定了重要基础.
2.3 基于径向基函数神经网络的逼近
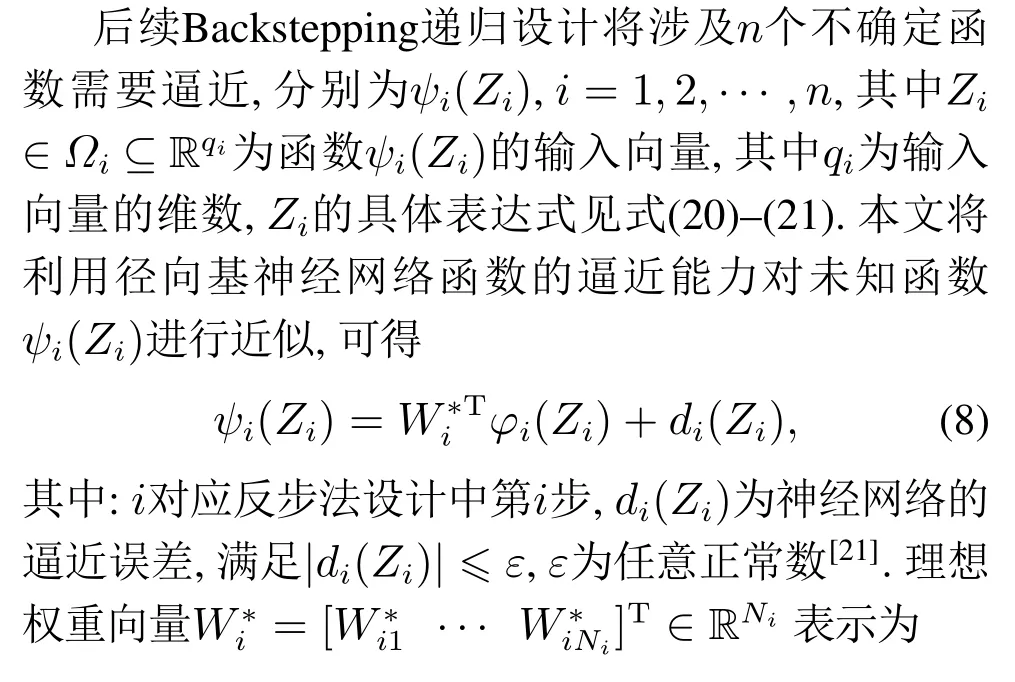
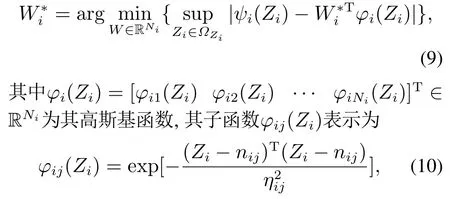
其中1 ≤j≤Ni,Ni为隐含层节点数,ηij是高斯基函数的宽度参数,控制了函数的径向作用范围.
3 针对磁滞约束的自适应控制设计
在本节中,首先引入降解的光滑函数以处理误差变量符号变化带来的抖动问题,并定义下文控制器设计过程所涉及的部分参数及变量,控制器设计部分使用时间导数具有半负定性质的Lyapunov 函数进行Backstepping自适应控制设计,最后证明所提控制方案的稳定性.
定义以下误差变量:
其中αi-1(t)为待设计的虚拟控制器,其具体表达式将在Backstepping递归设计的每一步依次给出(见式(30)(37)).对上述误差变量zi(t),i=1,2,···,n进行求导,可得
3.1 一类降阶光滑函数
在文献[22]中,一种基于Backstepping迭代设计的预定性能控制方案被提出,涉及一类高阶光滑函数
其中δi,i=1,2,···,n为用户预设的正常数.
注2文献[22]控制设计成功将上述光滑函数与自适应模糊控制方法融合,实现了不确定非线性系统的预定性能控制,即但其形成的控制策略需要计算这类高阶光滑函数对zi直至n阶的导数,给控制器实际运行造成了计算复杂性.为了克服这一缺陷,本文将采用一类降阶光滑函数开展非线性控制设计.
本文引入以下降阶光滑函数:

以下性质将用于后续控制设计:
注3本文将充分利用直接自适应神经网络控制策略的优势,针对具有不可参数化不确定动态的非线性系统(1)实现上述降阶光滑函数与Bacstepping递归设计的融合,解决文献[22]由高阶导数带来的复杂性,提高在实际工程中的应用价值.
为减少自适应估计参数数目,定义正值常数
上述符号Z1,Z2,···,Zn为神经网络的输入向量,其具体表达式如下:

其中W为待设计自适应估计参数.同时,为后续式(26)和式(36)中定义扩展向量φi(Zi)
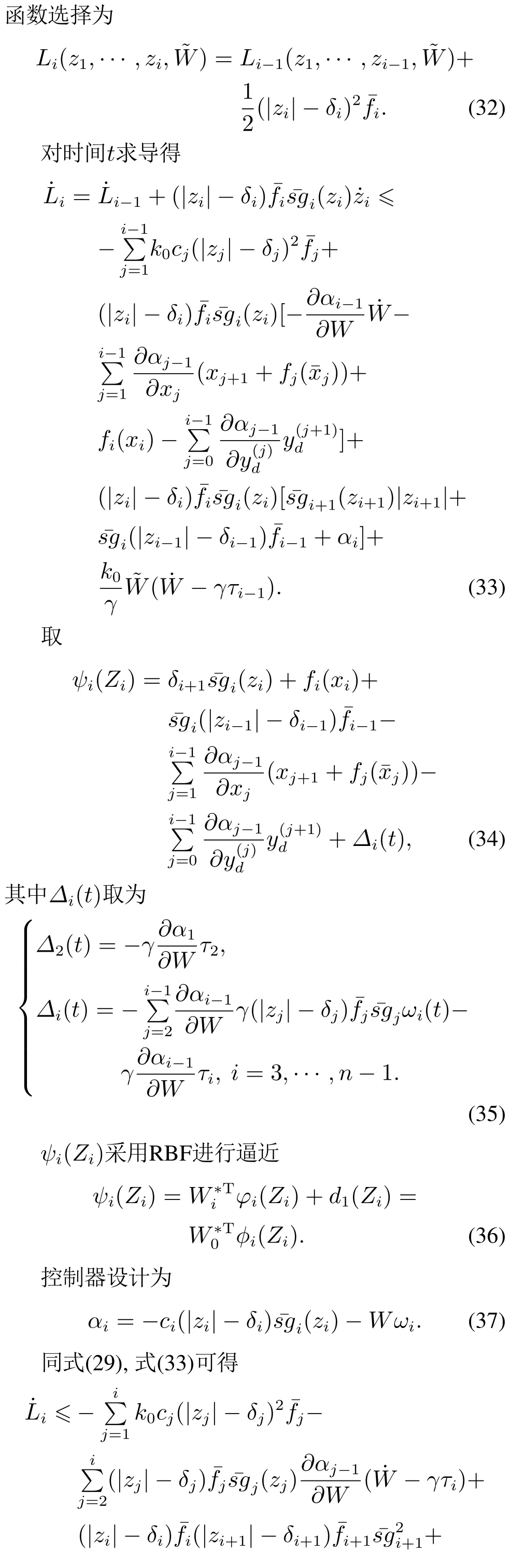
3.2 控制器设计
考虑到非线性系统(1)具有下三角架构的形式,本文将采用Bacstepping递归方法设计控制器,详细设计过程如下:
步骤1第1个子系统的Lyapunov函数选取为


3.3 稳定性证明
本部分将给出主要的研究结果,并证明闭环控制系统的稳定性和收敛性.
定理1考虑具有Preisach类型磁滞输入的非线性系统(1).若假设1和2成立,则采用控制策略(45b)与自适应律(45a)可保证闭环系统具有如下性能:
注5跟踪误差的大小取决于式(45)设计参数的选择.适当减少参数δi以及选择适当的参数γ能够使得系统的收敛速度得到较大的提升,使得跟踪误差收敛至预定区间内,但并非参数选择越大或越小,需要根据实际环境以及跟踪精度要求适当调整.
4 仿真与实验研究
为验证本文所提控制方案的有效性,本节将从以下3个阶段进行:第1阶段,首先对实际压电执行器未知参数进行辨识,以保证辨识结果与实际结果的可靠性,该阶段作为2,3阶段的基础;第2阶段为数值仿真阶段,通过阶段1所得参数构建Preisach模型,保证控制方案在闭环控制系统(如图2)下跟踪性能;第3阶段为验证本文方法在硬件系统平台(如图3)及在半物理仿真实验系统(如图4)下的性能效果.
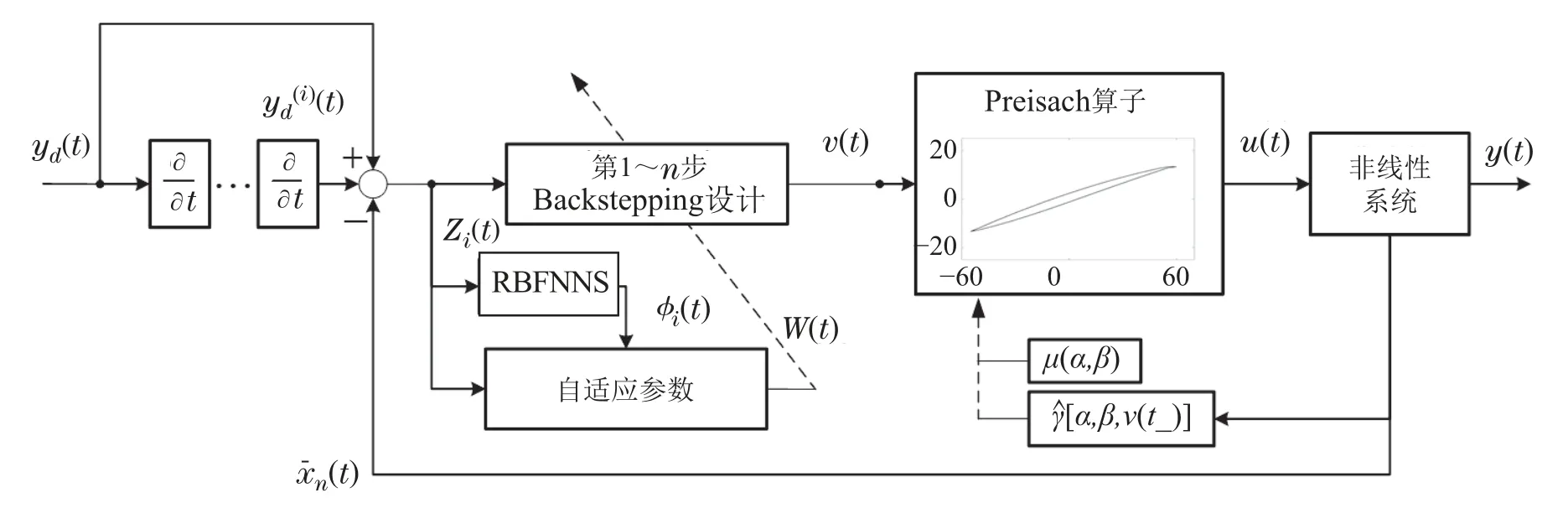
图2 闭环控制系统框图Fig.2 Diagram of the closed-loop control system
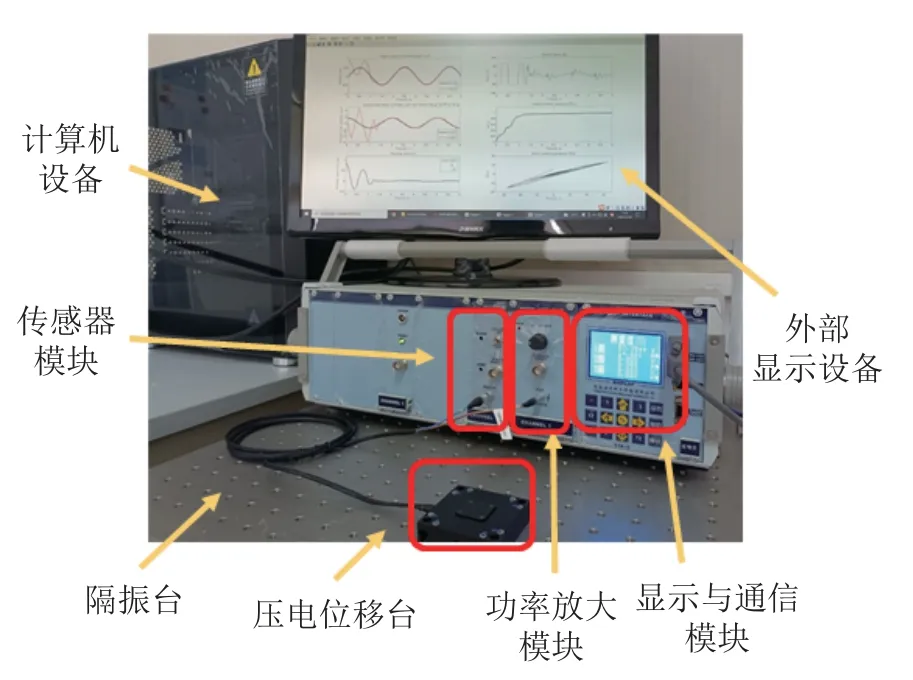
图3 硬件系统平台Fig.3 Hardware system platform
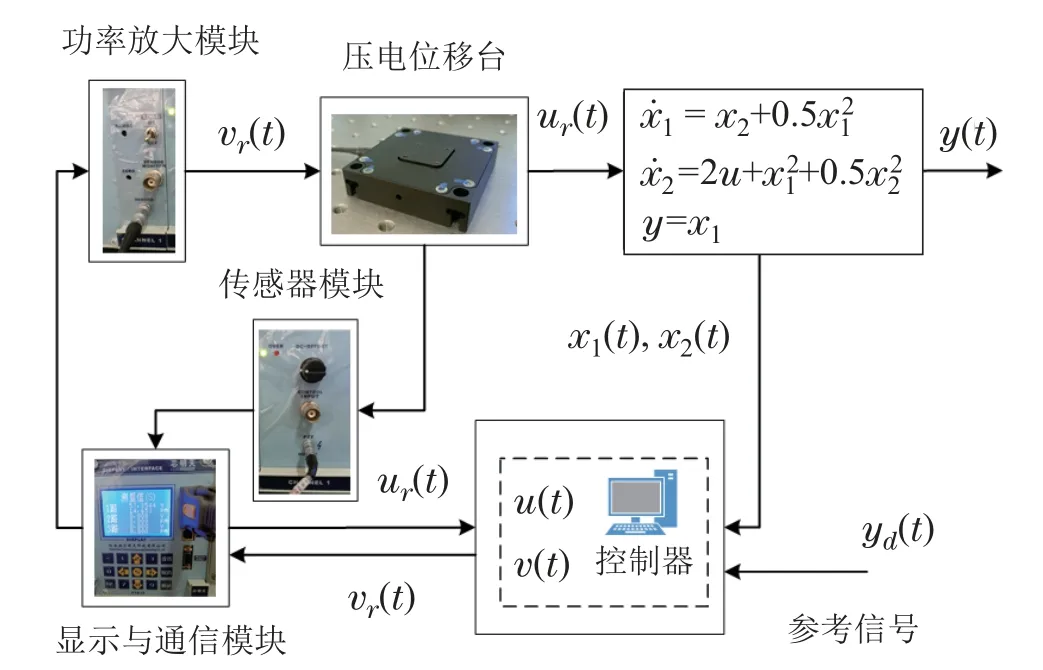
图4 半物理仿真实验系统Fig.4 Semi-physical simulation experiment system
4.1 基于Preisach算子的磁滞辨识
因不同的设备存在众多复杂的非线性关系,且各设备之间存在差异性,如式(2)中Preisach磁滞算子的密度函数μ(α,β)为未知项且与历史输入信息之间存在耦合性(记忆性),因此需针对图3实际压电执行器进行密度函数辨识.考虑到实际执行器的输入电压与标准输出行程均为正变量,以及传统Preisach模型的对称性等特点,对压电执行器采用式(2)形式描述其Preisach算子的磁滞非线性特性,并有式(49)-(50)映射转换

其中r,s为新的Preisach平面,与原平面作用等价.在此基础上,Preisach模型经典形式转换下输出曲线有如下坐标转换:

其中:vr(t),ur(t)分别为实际压电执行器的控制输入与系统输入,v(t),u(t)分别为变换后数字模型中的虚拟控制输入与虚拟系统输入.密度函数辨识结果如图5.图6为基于Preisach算子的磁滞环辨识结果,对所得辨识模型与图3 实际执行器在采样频率为5 Hz,20 Hz,50 Hz的三角波/正弦波电压输入下,其中图6(a),(c),(e)分别为在采样频率f=5 Hz,20 Hz,50 Hz下最大值为115 V,最小值0 V的三角波输入信号的磁滞输出信号,图6(b),(d),(f)分别为在采样频率f=5 Hz,20 Hz,50 Hz 下的正弦波波输入信号vr(t)=55 sin(2πft)+55的磁滞输出信号,对应的位移输出分别如图中虚线所示,辨识结果与实际轨迹之间的近似误差可保证在百分位内,可用于仿真实验中磁滞部分建模.根据对实际压电执行器磁滞的辨识结果,具备实验验证条件,可将其应用于下文仿真验证中,进一步为后文实验部分提供充分准备.
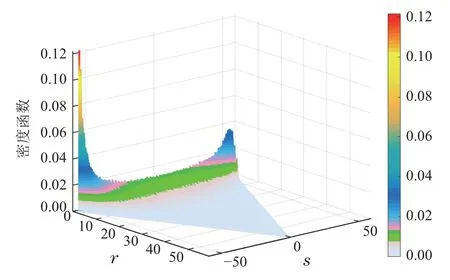
图5 Preisach算子密度函数Fig.5 Density function of the Preisach operator
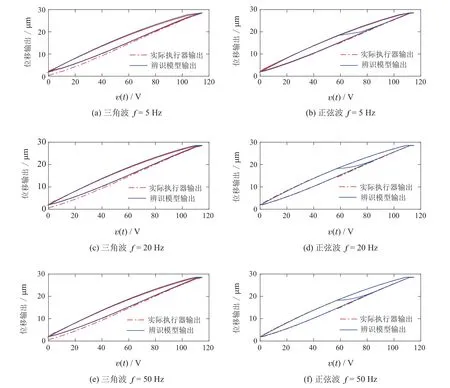
图6 基于Preisach算子的磁滞环辨识结果Fig.6 Hysteresis loop identification results based on the Preisach operator
4.2 仿真结果
结合上一部分的模型辨识结果,考虑执行器受Preisach类型磁滞约束的非线性系统(1)

采用式(37)(45)自适应律,控制方案流程如图2,其中期待跟踪轨迹为yd(t)=0.5 sin(πt),控制参数选择为:c1=40,c2=55,δ1=0.05,δ2=0.025,γ=0.05.系统初始值设置为x1(0)=0.85,x2(0)=0,W(0)=0.02.仿真结果如图7-9所示.图7为系统输出在本文控制方案下的轨迹跟踪结果,能够较为快速地跟踪上期待信号,且系统输出信号能够在有限时间内被约束至[yd(t)-δ1,yd(t)+δ1];图8为本文控制方案与PID控制方案跟踪误差曲线及性能对比图,均能在有限时间范围内跟踪上期望信号,其中采用PID控制方案能够保证闭环系统的稳定性,但实际输出在有限时间内只能大概跟踪上期望信号,其系统输出偏差在磁滞约束影响下的可达13%,这意味着采用PID方案的跟踪精度无法达到预设要求,而本文所提出的自适应神经网络控制方案能在保证稳定性的前提下,进一步提高跟踪精度,使得跟踪误差约束在预设范围[-δ1,δ1];自适应参数的快速收敛性也能得到保证,如图9所示,而自适应更新参数数量的减少,能够减少计算负担以及参数过多带来的调整问题.
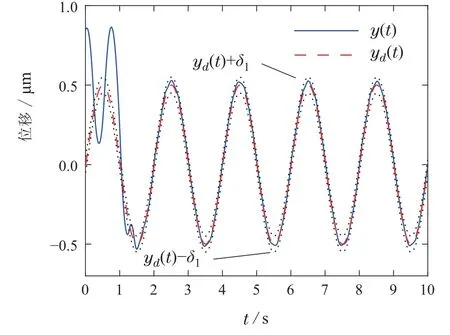
图7 轨迹跟踪性能结果Fig.7 Performance result on trajectory tracking
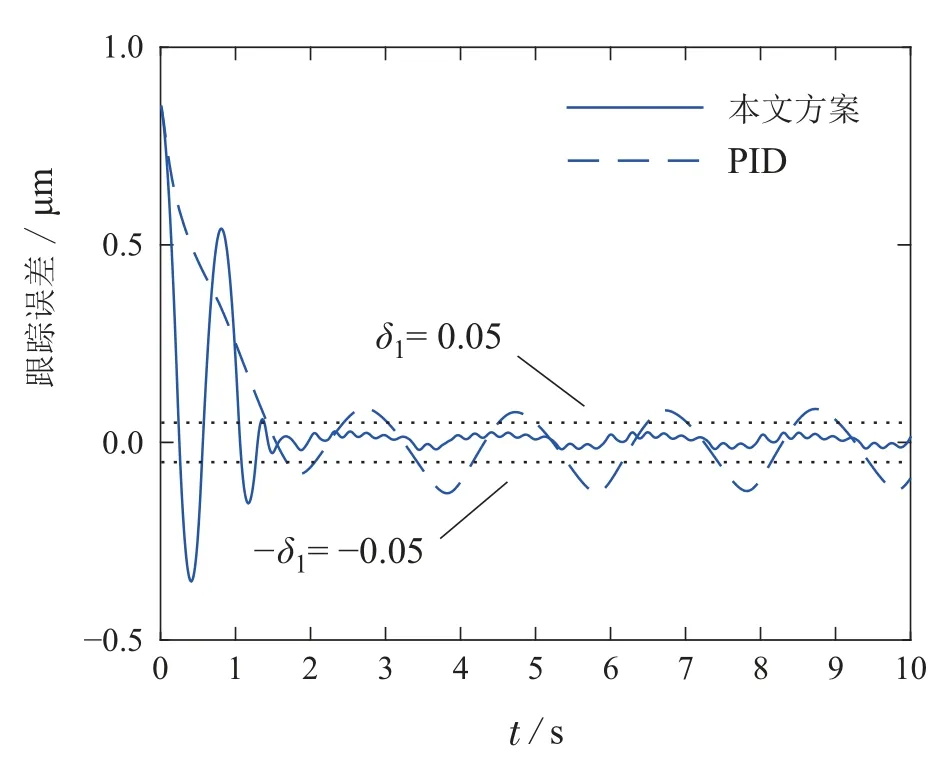
图8 跟踪误差曲线及性能对比Fig.8 Tracking error curve and performance comparison

图9 自适应参数W(t)Fig.9 Adaptive parameter W(t)
4.3 实验结果
为了验证该控制方案的性能,本文搭建一个硬件系统平台(见图3),并进行半物理仿真实验(见图4).实验设备包含如下:
1) 压电位移台:为芯明天公司压电纳米产品P66.X30S,其标称行程为24 μm(0~120 V),行程范围为30 μm(0~150 V),开闭环分辨率为1.5/0.7 nm,推/拉力为120/15 N.
2) 功率放大模块: 型号E 05.00.14,平均功率35 W,主要功能是将微弱的外部模拟输入信号或计算机经过D/A的模拟信号放大输出.
3) 显式与通信模块:型号E18.i3,具有测量和显示输出电压和PZT传感器控制模块的当前位移值,具备控制命令、键盘和软件进行人机交互操作数字闭环控制等功能.
4) PZT传感模块:型号E09.S1的PZT传感控制模块负责检测和处理PZT或微动工作台等纳米定位机构中的传感器信号,电压输出范围为0~10 V.
该系统具有式(1)的模型形式,期待位移输出设定为yd=0.5 sin(πt).按照式(37)(45)设计该系统系统的控制器,与仿真部分使用相同参数,控制过程如图2,4所示,执行器相关部分采用式(50)变换.实验结果如图10所示,半物理系统在受到实际压电执行器中存在的磁滞非线性影响下,本文所提控制方案能够保证系统输出对期望信号渐近跟踪,并且确保跟踪误差渐近收敛至用户预设区间[-δ1,δ1].仿真中采用式(2)双积分形式对Preisach类型磁滞部分建模,而实际压电执行器直接根据输入电压获取输出位移,其响应速度与通过计算得到位移的仿真方式相比要快上许多,因此实验部分结果较仿真部分有一定的提升,仿真结果与实验结果均验证了本文方法的快速性及实用性.
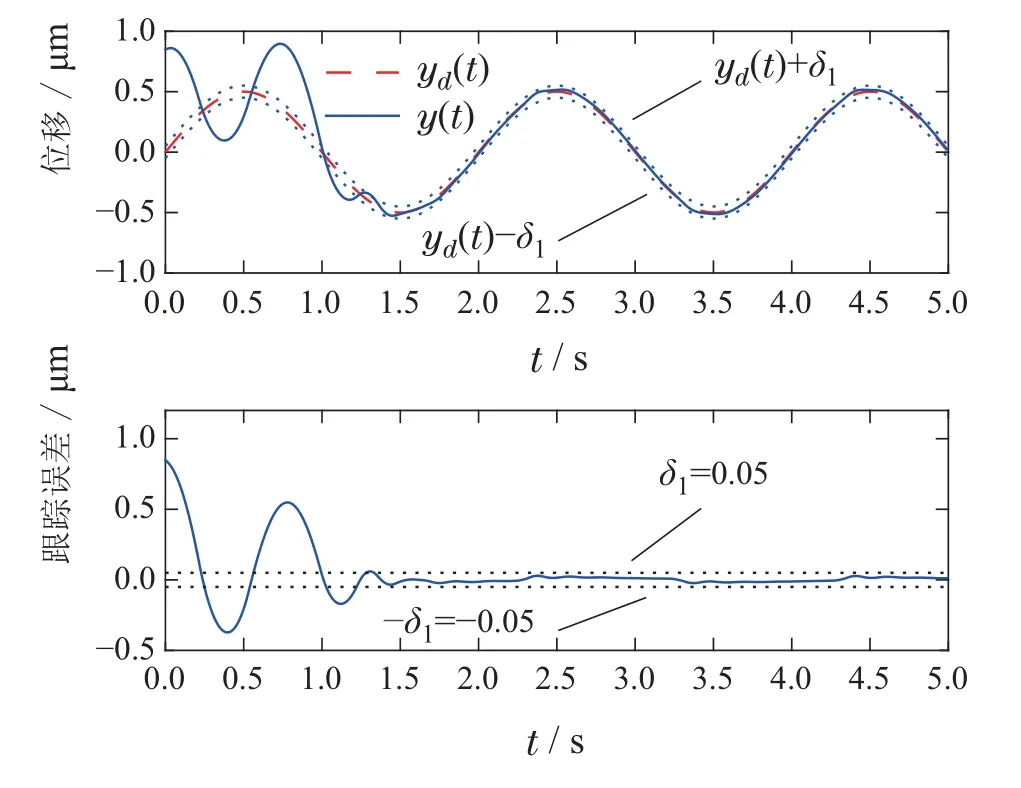
图10 实际跟踪曲线及跟踪误差曲线Fig.10 Actual tracking curve and tracking error curve
5 结论
本文研究一类执行器具有多环磁滞的严格反馈不确定非线性系统跟踪控制问题,通过对传统Preisach模型经典形式的分解,使得控制输入能够被显式表示,采用Backstepping迭代设计方法,并考虑具有更加一般性的系统非线性,引入了降阶光滑函数与自适应径向基神经网络方法设计控制器,提出一种具有预定性能的控制策略.本文所提方法估计参数只有一个,避免了多参数估计带来的计算负担及参数耦合问题;所设计控制器不仅能够保证状态渐近跟踪,也保证了系统的预设暂态性能,闭环系统所有信号的半全局一致有界性及参数的有界性均得到证明.仿真与实验结果也验证了所提控制策略的性能效果及先进性.
