基于DEMATEL-AISM的高速公路作业区行车风险因素分析
2022-11-07仉元野赵鲁华亓建锋徐小倩
仉元野,赵鲁华,亓建锋,徐小倩
(山东科技大学 交通学院,山东 青岛 266590)
0 引言
随着我国高速公路里程数不断增加,道路的磨损和设备的老化问题也随之出现,一些投入使用年限较长的高速公路已逐渐进入养护阶段,致使近些年的高速公路养护施工的作业量愈来愈多。高速公路养护作业区的存在会对现实作业区附近车辆的通行状态产生不容忽视的影响,增加车辆驾驶环境的复杂性,如有意外发生易导致交通事故的产生,存在很大的交通安全隐患[1]。因此,选用科学有效的方法对高速公路工作区行车风险影响因素进行识别风险是非常有必要的。
1 问题分析
为了解决养护施工行业制定交通安全措施过度依赖经验主观判断,缺少理论与方法支撑的弊端,进一步系统有效地识别高速公路作业区行车风险的影响因素。该文采用决策实验方法和对抗解释结构模型识别分析高速公路作业区行车风险的关键影响因素,分析各影响因素之间的作用关系,建立作业区行车风险影响因素的结构层级模型,提出作业区交通管理建议,为高速公路作业区的安全保障措施制定提供理论依据。
2 作业区行车风险因素集的建立
通过对高速公路作业区现场进行调研和专家调研,初步列举出31个作业区行车风险影响因素。按照研究组探讨和高速公路作业区安全专家咨询,最终整合确定15个工作区行车风险影响因素,见表1。

表1 高速公路作业区行车风险影响因素集
3 DEMATEL-AISM的行车风险因素分析步骤
3.1 DEMATEL法
(1)构建直接影响矩阵O。通过专家评分或者成熟经验,首先确定固定的评论标准,调查不同因素之间的相互影响,确定不同因素之间的影响程度。
(2)对系统综合影响矩阵T进行计算。以矩阵每个元素整除矩阵中行元素数值相加最大值的方法,将系统直接影响矩阵O进行规范化处理,然后得到该系统下的规范化影响矩阵N,如下式(1)所示:

采用公式(2),求解系统综合影响矩阵T。

式中,I——单位矩阵。
(3)计算系统中各影响因素的被影响度、影响度、中心度、原因度。根据公式(3),计算各影响因素影响度Di、被影响度Ci。其中影响度Di为因素Fi所对应行的总和,被影响度Ci为因素Fi所对应列的总和。

各影响因素的中心度Mi与原因度Ri由公式(4)计算求得。

3.2 AISM法
(1)构建关系矩阵。首先根据公式(4)求得的各元素的中心度和原因度的绝对值构建评价矩阵Dn×n,然后使用偏序规则计算关系矩阵An×n[2]。
根据式(5)计算整体关系矩阵B。

(2)计算可达矩阵。根据式(6),对整体关系矩阵B进行连乘以求得可达矩阵R。

(3)划分对抗层级。结合公式(7)和可达矩阵R,通过结果优先和原因优先的计算规则进行影响因素对抗层级的划分。

(4)计算骨架矩阵。各层级中的因素没有强连接属性关系,则应用公式(8)计算得到骨架矩阵S[3]。

(5)构建结构层级模型。根据骨架矩阵S可知各因素之间的影响关系,并结合上述对抗层级划分的结果绘制对抗多级递阶模型图。
4 基于DEMATEL-AISM的作业区行车风险因素计算分析
4.1 计算过程
首先,设定作业区行车风险影响因素关系评估标准并使用Delphi法邀请20位高速公路作业区行车安全方面的专家评估作业区行车风险影响因素间关系的强弱,计算得到初始直接影响矩阵O。
然后,按照式(1)对直接影响矩阵O进行规范化处理,再根据式(2)计算得出综合影响矩阵T,按照式(3)(4)求得各影响因素的影响度、被影响度、中心度、原因度并根据各影响因素的中心度和原因度作笛卡尔坐标系,如图1所示。

图1 影响因素的原因结果图
最后,根据已求得的综合影响矩阵T,按照式(6)计算可达矩阵R。在此基础上,使用式(7)对各作业区行车风险影响因素进行对抗层级划分,并求得骨架矩阵,并根据矩阵数值结合层次划分结果绘制对抗层级拓扑图,如图2所示。
4.2 结果分析
4.2.1 层级及因果全系列分析
由图2可知,包含行车风险系统中的影响因素由上而下形成了7级3阶的有向递阶层次化结构。系统分为3阶:最上层临近致因阶、中层过渡致因阶、最下层本质致因阶。系统中因素的原因特性越往下越强,反之越弱;因素的结果特性越往上越强,反之越弱。
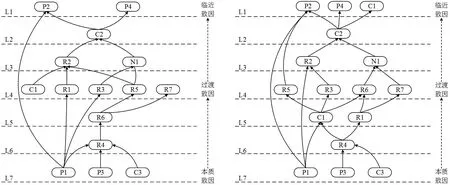
图2 基于DEMATEL-AISM作业区行车风险影响因素的结构层级模型
本质致因阶,即对抗层级图中的最下层因素{驾龄P1,非正常驾驶状态P3,超载/超限C3},该阶段因素只对其他阶层因素具有影响作用,而不会受其他因素的影响,表明驾龄P1、非正常驾驶状态P3,超载/超限C3是影响高速公路作业区行车风险安全的最根本原因。
临近致因阶,即对抗层级图位于的最上层因素{驾驶水平P2、超速驾驶P4、道路交通流状态C1},该阶层因素只具有影响其他因素的作用,是影响高速公路作业区行车风险的最直接因素。
过渡致因阶,其处于对抗层级图中层的因素,在系统是过渡因素,自身具有双重性的特征。在进行高速公路作业区行车安全管理时,也需要着重考虑对于过度致因阶因素的控制和管理,尤其是中心度较高的因素:{未保持安全车距C2、作业区安全设施的全面性R2、速度限制R1、封闭车道数R5、作业区长度R6}。
4.2.2 中心度与原因度分析
由图1可知,作业区各影响因素的中心度数值前五名为:超速驾驶P4、驾驶水平P2、未保持安全车距C2、作业区安全设施的全面性R2、道路交通流状态C1。
作业区行车风险影响因素负值原因度的绝对值由大到小排列前五位因素依次为:速度限制、作业区安全设施的全面性、超速驾驶、未保持安全车距、驾驶水平(R1、R2、P4、C2、P2)。高负值原因度的影响因素易受到其他因素的影响[4]。因此,对此类影响因素进行管理时,要注意联系上游连接因素的影响作用,做好同步管理方案和措施。
4.2.3 关键可控制因素分析
从上述分析可以发现,超速驾驶P4、驾驶水平P2、道路交通流状态C1不仅处于对抗层级图中的最上层(临近致因阶)而且在中心度排名也居前三位。可以看出,这三种因素具有较高重要性而且对高速公路作业区行车安全具有直接的影响作用。因此,选定以上三个影响因素作为作业区行车风险的关键可控制因素。
尽管本质致因阶的因素是影响作业区行车安全的重要因素,但是驾龄、非正常驾驶状态、超载/超限这三个因素在现实逻辑中很难应用。综合考虑三个层级之前的相互影响作用以及因素本身的重要性和影响性,选定作业区速度限制R1、作业区安全设施的全面性R2、施工强度R7三个因素作为作业区行车风险安全的关键可控制因素集合。
通过上述分析,选定超速驾驶P4、驾驶水平P2、道路交通流状态C1、作业区速度限制R1、作业区安全设施的全面性R2、施工强度R7共6个因素,作为高速公路作业区行车风险的关键影响因素。
5 理论建议
依据4.2的分析可知,作业区车辆的超速驾驶、作业区速度限制被识别为作业区行车风险的关键影响因素,这意味着作业区车辆的超速情况是作业区行车安全的重大威胁,作业区管理人员应该采取各类有效措施降低超速车辆占比,削弱作业区车辆超速行驶的影响。该研究认为应以优化升级作业区限速方案为出发点。根据现实施工调研可知,作业区现有限速管控效果并不理想,目前大多数项目部在进行作业区限速布置时,只是按照《公路养护安全作业规程》[5]施行单级或双级限速。限速措施未考虑实际道路条件以及车流情况,而且各施工队安全警示人员和设备配备良莠不齐,仅少数达到项目部安全要求标准。因此,对作业区限速方案进行设计优化时,需要考虑实际道路通行交通情况,设计更为合理和人性化的限速管控方案,保障车辆驾驶员有充足减速时间和安全距离,增强车流车速的稳定性,保障行车安全。
