浅谈自动紧急制动(AEB)技术的研究现状及趋势
2022-11-07袁胜学王朝新
杨 斌 袁胜学 王朝新
(陕汽集团商用车有限公司,陕西宝鸡 722400)
0 引言
在汽车工业稳定发展的背景下,我国汽车保有量不断提升。汽车固然可以改变人们的习惯及生活方式,但同样带来较多的问题及影响,尤其因制动不当造成的交通事故频发,导致人员伤亡数量不断提升,同时产生大量的经济损失。自动紧急制动(AEB)能够很大程度上避免或缓解追尾事故的发生,保护驾乘人员安全。因此,为减少因制动因素所导致的交通事故,应加强AEB技术研究的重视,并通过建立健全运行方案,对故障产生机理进行分析,加强多种主动安全协同工作研究,多方位提升主动安全性能。
1 自动紧急制动(AEB)系统概念及原理
在Euro NCAP统计下,城市交通事故主要原因就是两车处在较低相对车速下,牵扯已经停止的车辆与其追尾碰撞,这种碰撞超过交通总事故碰撞的25%左右。当驾驶员出现分心或无法分辨前方车辆速度、没有意识到存在碰撞危险或者发生碰撞时间过短时导致来不及对碰撞进行正确的处理,则会出现类似追尾的情况,产生的影响较为严重。针对AEB系统的研究,应加强重视对当前系统的研究现状进行分析,通过理论与实践研究对系统运行现状了解充分,最大化发挥研究的效果,为汽车领域的应用提供帮助。
AEB是在车辆处于紧急工况下通过主动制动方式来缓解或者避免碰撞的主动安全技术,属于一种汽车安全辅助驾驶系统。根据 Euro NCAP 定义,当汽车感知到即将发生碰撞时,系统自动进行制动来降低车速,并避免可能的碰撞,称为自动紧急制动(AEB)。AEB种类根据不同路况主要分为城市AEB、城际AEB以及行人AEB,其系统的功能由前车探测系统、多数据融合算法、制动执行机构共同实现。当系统计算出车辆的碰撞风险达到临界报警点(t)时,系统会通过视觉、声音等方式向驾驶员发出预警,提醒驾驶员提前做出避免碰撞的操作;如果驾驶员没有对预警及时做出正确反应操作时(t),系统会加快预警频率同时通过轻微振动制动踏板或转向盘等额外的方式向驾驶员发出警告,系统此时会通过点刹、发动机转矩限制等方式进行部分主动制动。当系统计算的碰撞危险程度达到临界制动点(t)时,已经无法人为避免与前方目标碰撞,系统会进行自动全力制动来缓解或避免碰撞,其工作过程如图1所示。
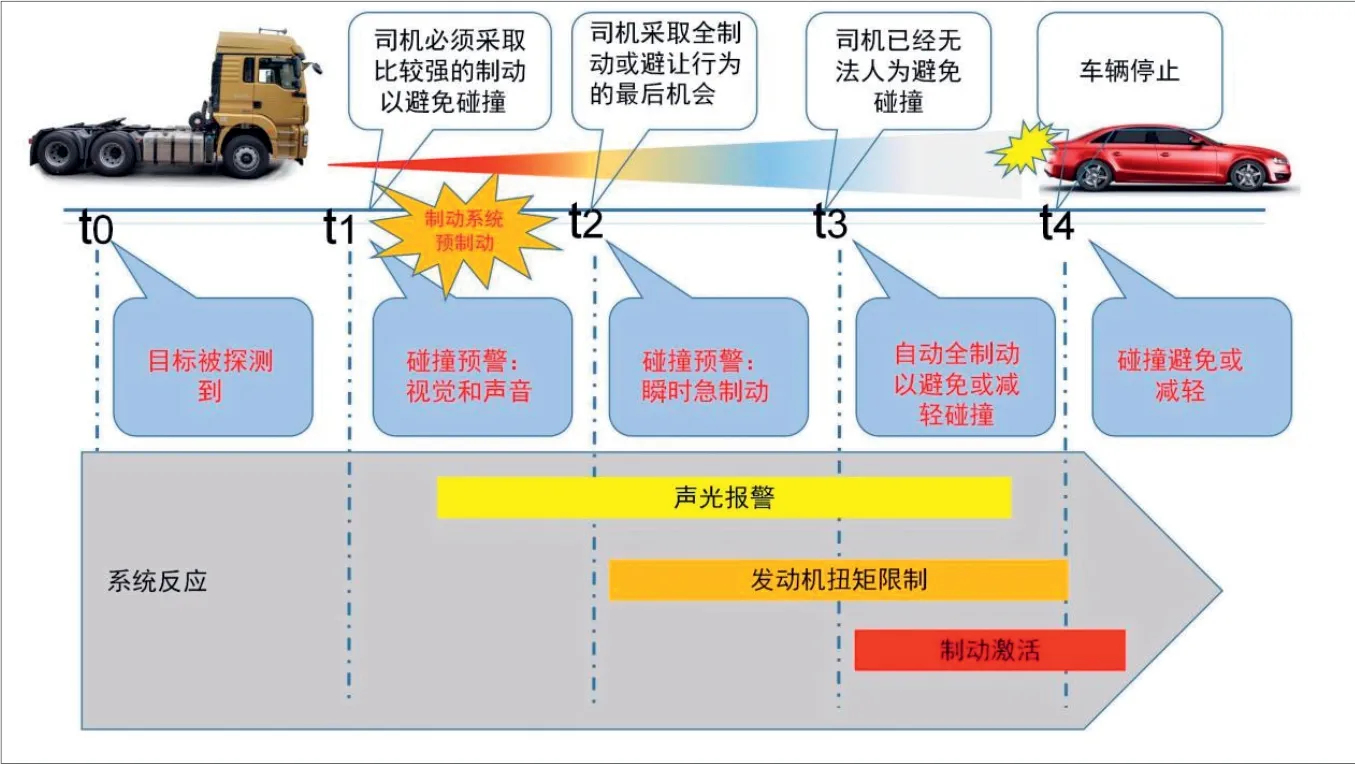
图1 自动紧急制动(AEB)系统原理图
2 自动紧急制动(AEB)系统相关法规标准和测评方法
近年来伴随着汽车工业的飞速发展,汽车主动安全技术日新月异。主动安全相关法律法规不断建立健全,2016年至2020年间交通部基于不同类型营运车辆分别发布了营运客车、载货汽车、牵引车和半挂车、危险货物运输车等安全技术条件,明确了各车型对AEB的具体车型配置要求,如表1所示。
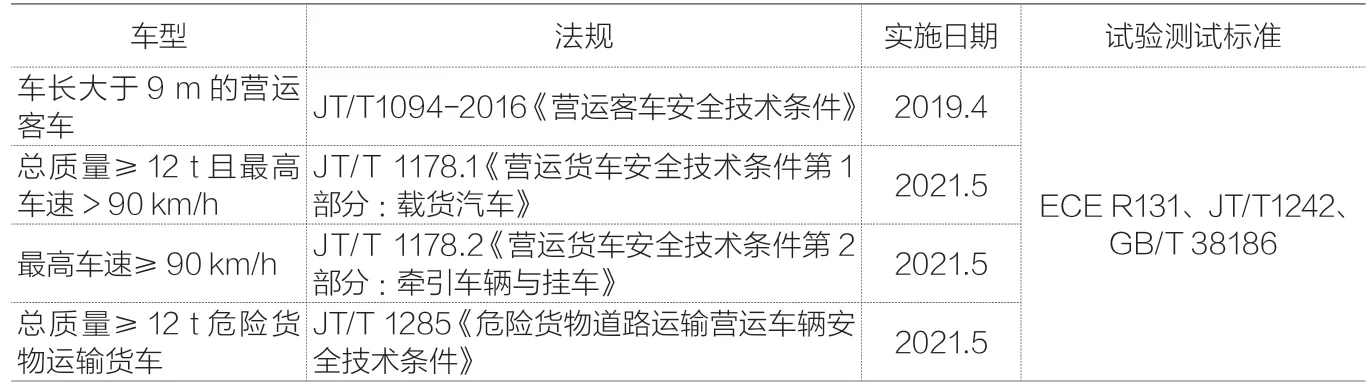
表1 各车型的AEB配置要求
我国对AEB测评方法的建立起步较欧美国家晚,2017年4月20日,中国汽车技术研究中心发布了中国新车评价规程(C-NCAP)管理规则(2018 年版),该管理规则新增加车辆AEB系统的试验和评价方法。2019年3月15日交通部发布JT/T 1242《营运车辆自动紧急制动系统性能要求和测试规程》,同年10月国家标准化管理委员会发布GB/T 38186《商用车辆自动紧急制动系统(AEBS)性能要求及试验方法 》,填补了我国在AEB测评领域的空白,主动安全检测进入到高速发展阶段。
3 自动紧急制动(AEB)系统避撞策略
3.1 行车间距安全距离避撞策略
行车间距安全距离避撞策略,主要就是保证汽车安全行驶,同时可以确保车辆与其他车辆保持安全距离,并从距离尺度将自车与同车道前方距离最近的车辆实时间距作为衡量形成危险状态的指标,通过与策略中预警安全距离的控制,实现更加准确的对比分析,指导AEB系统作出预警和主动制动避撞操作。这种策略,主要通过与目标车的相对车速、自车最大制动减速度、目标车最大减速度等各项指标进行分析,同时考虑驾驶员的反应时间、系统延迟时间等,从而提升整体规划的效果。
3.2 驾驶员反应特性的碰撞发生时间避撞策略
此项策略的实施,需要对驾驶员的反应时间进行分析,尤其是在危险情况下的认知和判断条件下,从时间尺度将自车当前运动状态到与前车发生碰撞所剩余的碰撞发生时间(TTC)作为衡量行车危险状态的重要指标。在此环节进行处理与优化的过程中,应对雷达获取要点有着充足的掌握,得到实时TTC数值,并与系统所设定的碰撞预警的TTC进行对比,指导AEB系统作出主动制动避撞操作。而且针对驾驶员反应特性与AEB系统主动制动,在面临危险时,通常人的反应会出现延迟,甚至会出现错误操作的情况,所以在研究过程中应对碰撞发生时间避撞策略进行深入探究,通过理论与实践的整合,将其贯穿到AEB系统避撞策略研究工作当中。
3.3 制动转向协同避撞策略
制动转向系统协同避撞策略利用纵向AEB系统及横向转向系统协同工作达到避撞目的。在探究过程中需要对AEB系统制动前车速高低以及通过车辆前方出现形成横穿马路或车辆违规形式等行为进行分析,对是否影响实时TTC瞬间变化进行探究,从而判定是否通过制动全速制动实现避撞,是否需要转向系统协同工作来实现完全避撞,从而有效实现AEB系统的避撞作用。基于系统避撞策略展开的各环节,应对整合转向系统过程制动进行优化,提升AEB系统避撞性能稳定性。
3.4 AEB系统避撞总结
通过对国内外AEB系统避撞策略的研究,AEB避撞策略综合性能主要从安全性、智能性及舒适性等角度出发,其中安全性较为重要,必须要从这一层面进行全面分析、掌握主要影响因素,不断加强避撞策略研究方案,提升AEB系统避撞安全性。对于智能性来讲,主要就是探究AEB系统在复杂交通场景应对的表现,而舒适性则从避撞策略是否干预驾驶员正常操作来体现。为了实现较高车速下的避撞,从避撞策略的安全性考虑,目前普遍采用较为保守的安全距离避撞策略,会出现相较于驾驶员正常避撞操作更早地主动制动情况,从而影响驾乘体验。因此,为了实现更高车速下的完全避撞并提高安全性,应通过深入研究制动转向协同避撞策略来实现高车速下的完全避撞。
4 自动紧急制动(AEB)系统的发展趋势探究
汽车厂商在实践展开研究工作的过程中,应对系统的研究工作有着充足的认识,并在现有成果的基础上进行创新研究,遵循未来发展方向。
第一,针对复杂多变的交通场景下AEB避撞综合性能的优化,加强在行人突然横穿马路、侧方突然插入车辆等复杂场景避撞效果的研究提升。借助毫米波雷击、单目、双目摄像头以及激光雷达等感知技术的发展,提升AEB对于对周边区域场景实时信息的获取,并针对更多复杂交通场景不断丰富AEB系统的避撞效果,全面提升其安全性、舒适性与智能性。
第二,全面开展更快响应时间目标的AEB执行机构装置、简化制动系统的研发工作。目前开展的AEB执行机构研究主要围绕减少主动制动响应时间和提升主动制动控制精度为目标,应针对紧急制动距离、主动制动响应时间、制动系统的简化设计等各项工作进行分析研究,朝着成熟的线控制动系统发展,替代现行的AEB执行机构。
第三,危险行驶工况下需与多种主动安全技术深度融合、协调工作。AEB系统主要就是辅助驾驶员在车辆处于紧急工作状态时缓解或避免碰撞发生,而且系统的运行以安全为主,属于ADAS辅助驾驶系统中的一部分,对汽车安全性能要求不断提高。AEB作为紧急状况下的主动制动,单纯的从制动方面无法实现对危险的全面规避,只能够适当的进行减轻。因此,要 想全面提升车辆主动安全性能,则应该将AEB与主动转向、主动加速等安全技术进行深度整合,将所存在的问题有效解决,使其逐渐转变成无人驾驶技术中专门应对紧急工况的车辆自动紧急控制系统。
5 总结
在近些年汽车保有量不断提升的背景下,各厂商已加强对AEB碰撞策略及制动执行机构等相关技术进行研究,并取得一定的研究成果,但要想更加全面提升AEB系统的综合性能,必须从多方面深入探索各项问题,如在复杂多变的场景下AEB碰撞综合效果、响应时间的缩短以及危险行驶情况下多种主动安全技术的协调控制等,杜绝所产生的影响及限制,提升技术研究的效果。
