基于有限时间收敛的双臂空间机器人捕获卫星主动对接力/位姿阻抗控制1)
2022-11-06朱安陈力
朱 安 陈 力
(福州大学机械工程及自动化学院,福州 350108)
引言
随着人类对太空探索的深入,近十几年来各国向太空发送了大量的卫星,其中难免出现携带燃料耗尽,或某一部件发生损坏而造成卫星失效的情况.为降低太空探索成本,对失效卫星进行燃料的加注或损坏部件的修复,已成为太空发展的重要方向[1].使用空间机器人完成上述工作是一种行之有效的方法,受到了众多学者的关注.戈新生等[2]对自由漂浮空间机器人的路径规划进行了研究;郭闻昊等[3]和Xu 等[4]对空间机器人捕获操作进行了分析;范纪华等[5]研究了柔性空间机器人的建模问题;Zhu 等[6]和艾海平等[7]对空间机器人的柔顺控制进行了研究.
相较于单臂空间机器人,双臂空间机器人具有更大的负载,更高的灵活性,能执行更复杂的任务,是目前空间机器人领域研究的重点[8-11].虽然单、双臂空间机器人在捕获对接操作过程中都存在非完整动力学约束,末端执行器与卫星接触碰撞包含动量、动量矩和能量的传递等问题,但双臂空间机器人捕获卫星后形成的混合体系统需考虑闭环接触几何学、运动学约束与双臂协调控制问题,因此对其研究相对困难.Jia 等[12]和Yan 等[13]对双臂空间机器人的协调控制进行研究;朱安等[14]对捕获过程的动力学演化进行分析;Zhang 等[15]采用时延估计对多臂空间机器人的控制问题进行研究;Liu 等[16]研究柔性双臂空间机器人的碰撞动力学问题.
针对捕获、主动对接过程中的碰撞问题,Uyama等[17]为避免空间机器人与自由漂浮卫星剧烈的接触、碰撞,提出一种基于恢复系数阻抗控制策略.Gangapersaud 等[18]对参数未知的非合作、翻滚目标的捕获操作进行研究,并对末端执行器的力/力矩进行分析.陈钢等[19]针对碰撞问题,利用碰撞过程中的冲量原理建立碰撞动力学模型,且提出一种碰撞运动分析算法.Liu 等[20]利用赫兹接触理论建立空间机器人与目标航天器之间的接触力模型,分析捕获接触力对整个系统控制过程的影响.Wu 等[21]基于柔度接触力和刚毛摩擦模型建立通用的摩擦接触模型,可模拟复杂构型接触界面间多点接触的间歇摩擦接触情况.Moosavian 等[22]基于指定阻抗的概念,提出一种适用于多空间机械臂捕获空间目标的多阻抗控制.综合分析上述研究成果可知,大多数学者的关注点在接触、碰撞模型的建立上,而忽略了对关节的保护.一般情况下,在机械臂关节处添加柔顺机构可在机械臂与外界环境发生碰撞时较好的保护关节不受冲击破坏[23-25].因此,在空间机器人的关节处添加一种弹簧阻尼缓冲机构(spring damping buffer device,SDBD),以防止机械臂末端执行器与卫星的接触、碰撞及卫星对接装置与载体的接触、碰撞产生的冲击载荷对空间机器人关节造成冲击破坏.
在实际操作中,为避免发生因激烈地碰撞造成机械臂、卫星对接装置及载体的损坏,需要对卫星对接装置前部位姿及输出力进行非常精细的控制.一般的,末端位置控制精度应优于2 mm,姿态控制精度应优于 0.5o,输出力控制精度应优于1~ 2 N,由此对主动对接操作的研究具有一定的难度.考虑到Hogan[26]提出的阻抗控制可通过对阻抗参数的调整,建立末端位姿和输出力之间的动态关系.因此本文结合阻抗控制原理,对空间机器人主动对接的力/位姿控制进行研究.滑模控制(sliding mode control,SMC)由于结构简单,鲁棒性强而被广泛应用于机器人系统的控制中.然而传统的滑模控制收敛速度慢,只能保持渐进收敛,且存在抖振问题[27].为提高收敛速度,近年来有限时间滑模和固定时间滑模受到较多的关注[28-31].虽然固定时间滑模的收敛速度一般快于有限时间滑模,但其收敛速度过于依赖滑模面的参数,在保证收敛速度的同时往往会导致控制力矩偏大.考虑到空间机器人的输出力矩有限,设计了一种非奇异快速终端滑模控制(nonsingular fast terminal sliding mode control,NFTSMC),其在保证有限时间收敛与控制精度的同时,还综合了超扭滑模抗抖振的优点,且能有效避免奇异现象.
本文研究空间机器人捕获卫星主动对接操作.在机械臂关节处添加了SDBD 避免接触、碰撞过程中关节受冲击破坏.结合牛顿第三定律、动量守恒定理、捕获点速度约束和闭链几何约束,导出闭链混合体系统动力学模型.结合阻抗控制原理,建立二阶线性阻抗模型,提出一种非奇异快速终端滑模控制策略实现对卫星对接装置的力/位姿控制.
1 SDBD 模型结构
SDBD 的结构如图1 所示,其主要由弹簧、阻尼器、输入圆盘和负载轴组成.弹簧主要用于传动与冲击能量的吸收,阻尼器则实时提供阻力来抑制柔性振动.输入圆盘与电机相连、负载轴与机械臂相连,为了让阻尼器实时同步提供阻尼力抑制柔性振动,将其嵌套在弹簧内部实现同步运动.为更加真实的描述空间机器人系统,将电机端、机械臂端的阻力等效为阻尼器提供.图中ksi和Dti(i=1,2,···,6)分别为弹簧的刚度和阻尼器的阻尼系数;Dmi和DLi(i=1,2,···,6)分别为电机和机械臂端等效阻尼系数.在空间机器人末端执行器与目标卫星发生接触、碰撞和对接装置与载体发生接触、碰撞时,关节电机将受到很大的冲击力矩,该力矩会被弹簧和阻尼器快速缓冲、卸载,以实现对关节的保护.
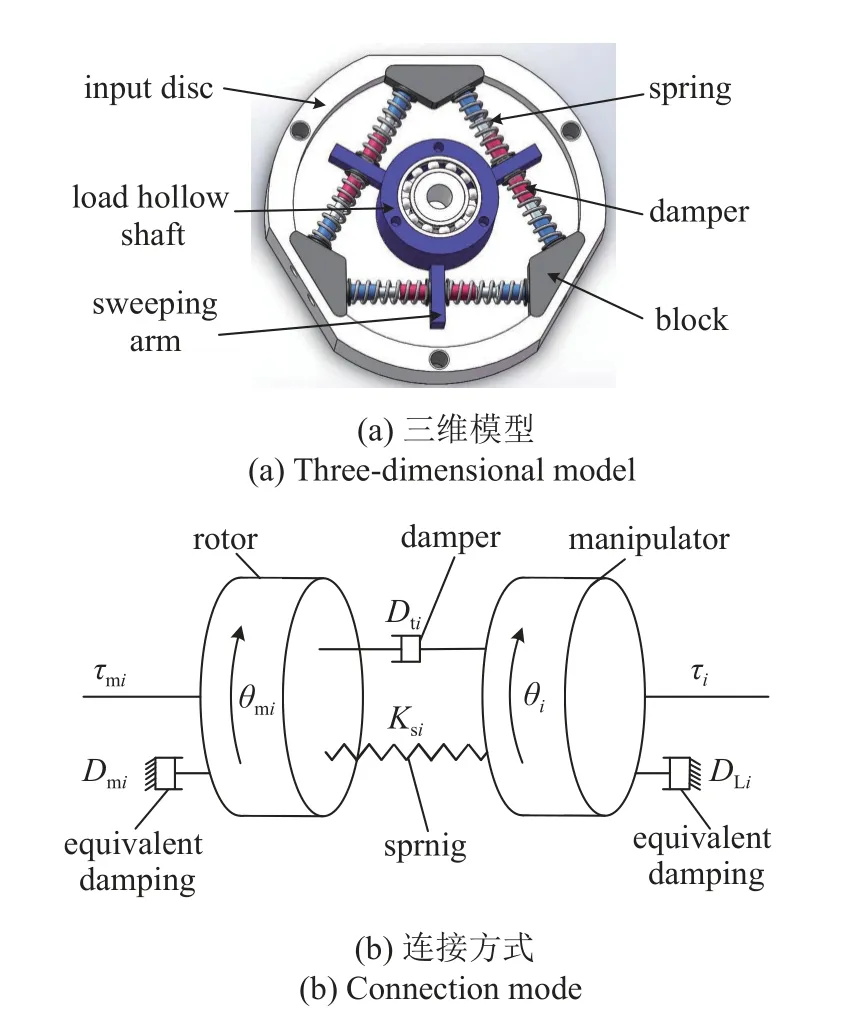
图1 SDBD 结构Fig.1 Structure of the SDBD
2 动力学建模与碰撞力分析
2.1 动力学建模
双臂空间机器人与目标卫星系统如图2 所示.
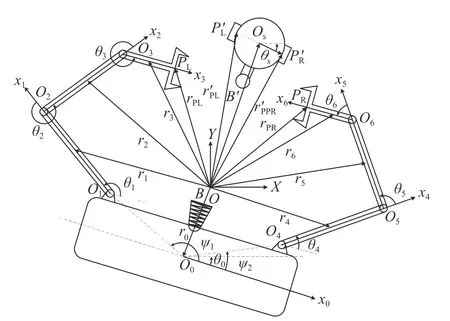
图2 双臂空间机器人与目标卫星系统Fig.2 Dual-arm space robot and satellite systems
其中,O0,Oi(i=1,2,···,6)和Os分别为载体质心、各关节铰中心和卫星质心;PL和PR分别为机械臂左和右执行器末端点;和分别为卫星左和右把手末端点;B和B′分别为载体对接装置与卫星对接装置上的点,XOY为系统随轨道平动的惯性参考坐标系;x0O0y0和xsOsys分别为固定在载体质心和被捕获卫星质心上的坐标系;xiOiyi(i=1,2,···,6) 是固定在关节铰中心的连杆坐标系.空间机器人及目标卫星系统参数定义如表1 所示.
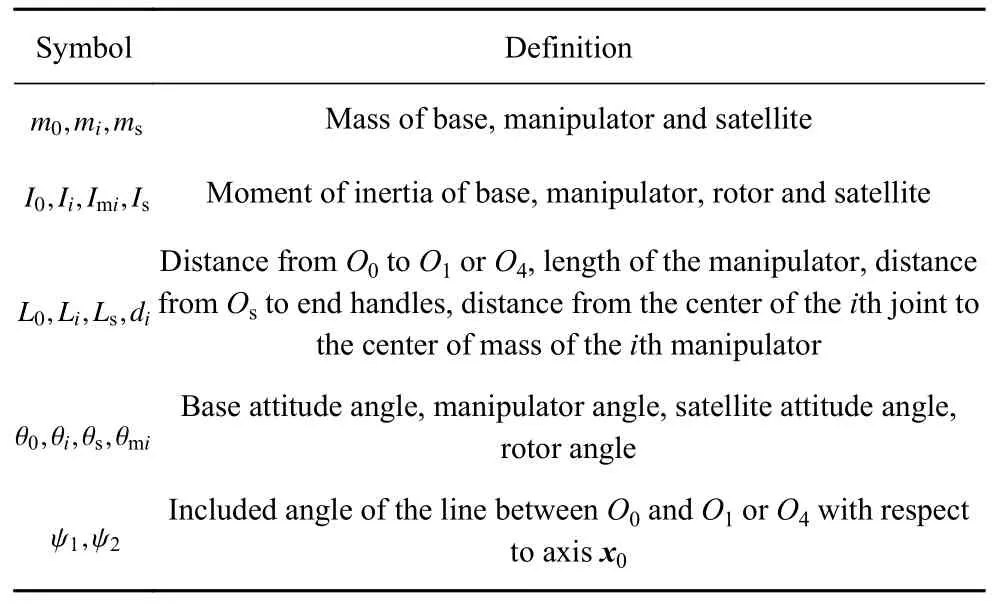
表1 空间机器人与目标卫星系统符号定义Table 1 Symbol definition of space robot and satellite systems
参考文献[6]可得碰撞前的空间机器人与目标卫星分体系统力学方程为

空间机器人与目标卫星发生碰撞时,各自的运动状态会发生变化,式(1)和式(2)结合牛顿第三定律得

假设碰撞后空间机器人与目标卫星锁紧固连形成闭链混合体系统,则在基座连体坐标系下,机器人左臂捕获点与卫星左把手被捕获点速度满足
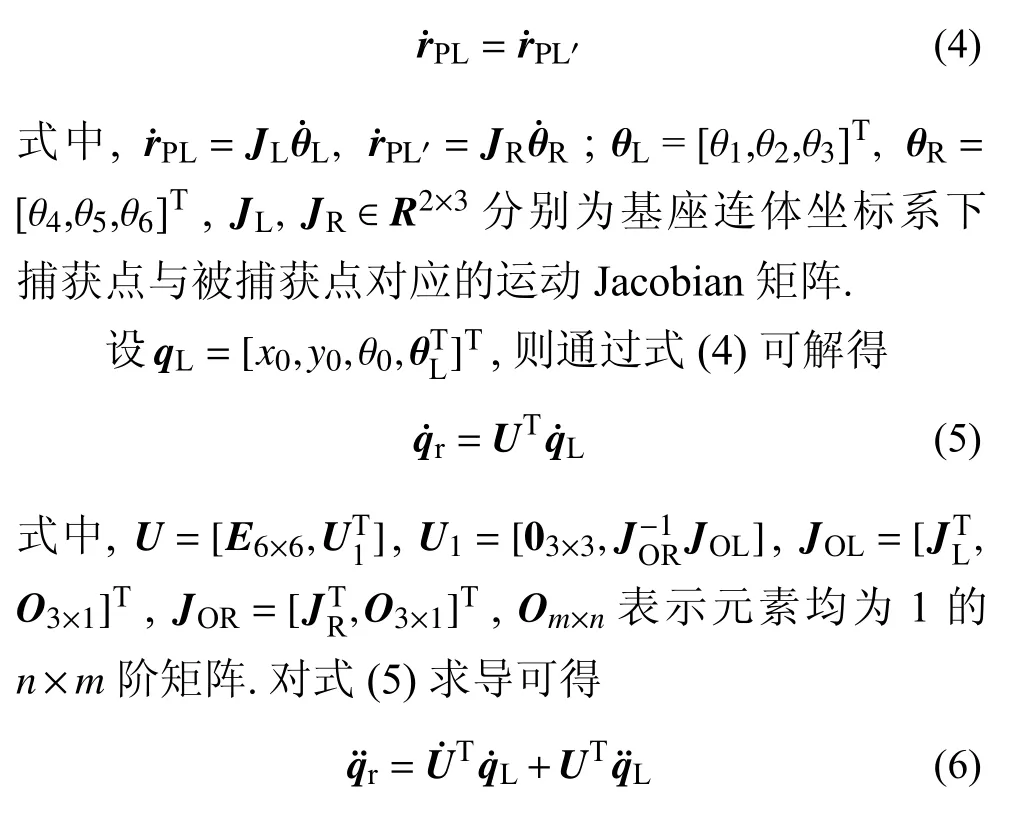
捕获后在惯性参考坐标系下,机器人左臂末端捕获点与卫星左把手被捕获点的速度满足
对式(8)求导可得

将式(5)、式(6)和式(8)代入式(3)可得
捕获操作完成后,机械臂末端执行器与被捕获卫星把手锁紧,因此内力项对闭链混合体系统运动无影响.由于闭链混合体系统不受外力作用,且Hh和DLh前两列元素均为零,故由式(11)可解得完全能控形式的闭链混合体系统动力学模型
2.2 冲击效应计算
由于空间机器人捕获卫星操作的过程中未受到外力影响,因此整个系统满足动量守恒,假设碰撞时间为 Δt,对式(1)和式(2)在碰撞时间内进行积分得
式中,t0为碰撞时刻.由于碰撞时间 Δt很短,在这一时段可认为系统的广义坐标未发生突变,仅有广义速度和广义加速度发生突变.为了保护关节电机,在碰撞阶段电机处于关机状态,故式(13)可近似为
结合式(5)、式(8)和式(14)可解得冲击效应为

将式(15)代入式(14)可得碰撞冲击力为

3 阻抗模型分析建立
空间机器人捕获卫星后与其固连形成混合体系统,因此在主动对接过程中只需要研究卫星对接装置在基联坐标系内的轨迹运动情况.将卫星对接装置B′点相对于rB′在基联坐标系x0O0y0上投影可得
式中,LB′为卫星质心Os到对接装置前部B′的距离.
式(17) 对时间求导可得B′点在基联坐标系x0O0y0下的相对运动学关系为

式中,X=[θ0,xB′,yB′,θB′]T,θB′=θ1+θ2+θ3,JB′ ∈R4×4为增广的相对运动Jacobian 矩阵.
阻抗控制将阻抗关系模型与力和位姿容纳到同一个框架,对力和位姿的动态关系进行调整,且可通过调整阻抗参数来保持对接装置位姿与环境之间接触力的理想动态关系.考虑到空间机械臂在主动对接过程中对末端输出力和位姿均有控制要求,因此将阻抗控制应用于主动对接操作.一般的,对接装置前部阻抗关系的数学模型可表现为二阶微分方程形式,环境模型可近似为二阶非线性函数形式

式中,Xd和Xe分别为对接装置前部的期望位姿和参考位姿;∈R4×4,∈R4×4和∈R4×4分别为机械臂惯量矩阵、阻尼矩阵和刚度矩阵;Be∈R4×4和Ke∈R4×4分别为环境阻尼矩阵和刚度矩阵,∈R4×1和Fe∈R4×1分为对接装置前部输出力/力矩和接触力/力矩.

4 控制器设计
由于主动对接过程中要控制卫星对接装置的位姿,因此需将关节空间的动力学方程转换到惯性空间.通过式(18)可解得
结合式(12)与式(21)可得
由于空间机器人燃料的消耗,捕获的卫星质量估计不准确等,混合体系统的参数一般难以精确获得,为实现对接装置前部位姿的精确控制,需将系统的不确定项进行分离.假设系统的不确定参数可表示为
通过式(22)和式(23)可得分离不确定参数后的系统动力学方程为

通过式(24)可解得
4.1 非奇异快速终端滑模面设计
定义卫星对接装置前部位姿误差及其导数为
根据式(27)设计如下形式的非奇异快速终端滑模函数
因此误差收敛的总时间为

4.2 控制方法设计
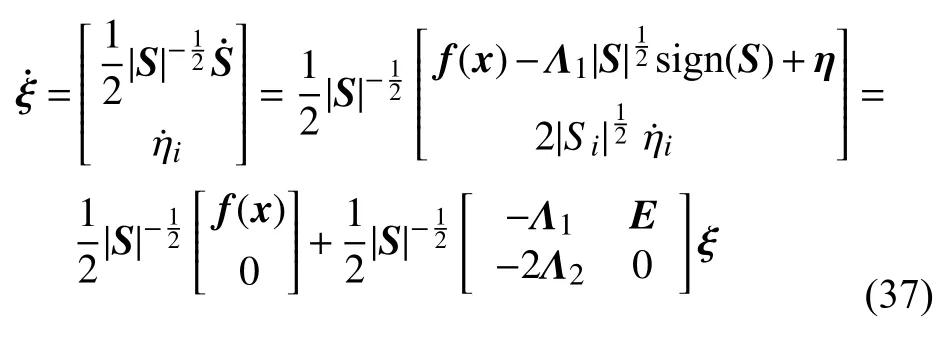
对式(28)求导且结合式(26)可得
假设1系统参数不确定项有界,且有|fi(x)|≤ki>0(i=1,2,3,4).
为实现对接装置前部位姿的稳定控制,设计如下形式的控制力矩
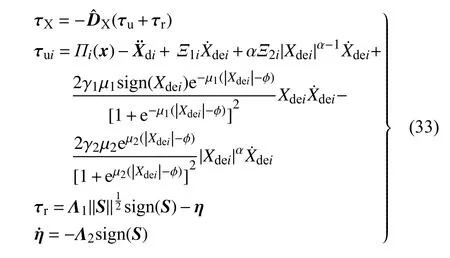
式中,Λ1=diag(Λ11,Λ12,···,Λ14),Λ2=diag(Λ21,Λ22,···,Λ24).
将式(33)代入式(32)可得

定理1对式(22)的混合体系统,若采用式(28)所设计的滑模函数,式(33)所设计的控制力矩,则混合体系统可在有限时间内收敛.
选取如下形式的Lyapunov 函数

对式(35)求导可得

由 ξ 的定义可知其导数为
将式(37)代入式(36)可得

结合式(20)和式(33)可将阻抗控制模型与非奇异快速终端滑模控制相结合,根据卫星对接装置前部输出力/力矩与末端接触力/力矩的误差,在线修正对接装置前部位姿,并实现对输出力/力矩的跟踪.当开启阻抗控制时,结合阻抗控制原理,空间机器人系统动力学模型可写为

5 仿真分析
5.1 SDBD 抗冲击性能模拟
采用图2 所示的空间机器人主动对接操作进行仿真分析.空间机器人系统参数为:m0=200 kg,mi=10 kg(i=1,2,4,5),mj=5 kg(j=3,6) ,Li=2 m(i=1,2,4,5),Lj=1 m(j=3,6),di=1 m(i=1,2,4,5),dj=0.5 m(j=3,6),I0=128 kg·m2,Ii=15 kg·m2(i=1,2,4,6),Ij=2 kg·m2(j=3,6),Imi=0.05 kg·m2(i=1,2,···,6),ksi=1000 N/rad(i=1,2,···,6),Dmi=28.65 N·s/rad(i=1,2,···,6),Dti=1146 N·s/rad (i=1,2,···,6),DL1=28.65 N·s/rad(i=1,2,···,6),ψ1=2.791 rad,ψ2=0.349 rad. 卫星系统参数如下:ms=50 kg,ds=0.5 m,Is=8.5 kg·m2.
为了验证SDBD 的抗冲击性能,在惯性参考系XOY下,给定多组卫星速度对关节所受冲击力矩进行模拟,结果如表2 所示.其中第1 列为卫星速度,第2 列为添加SDBD 时的最大冲击力矩,第3 列为未添加SDBD 时的最大冲击力矩,第4 列为SDBD降低冲击力矩的百分比.
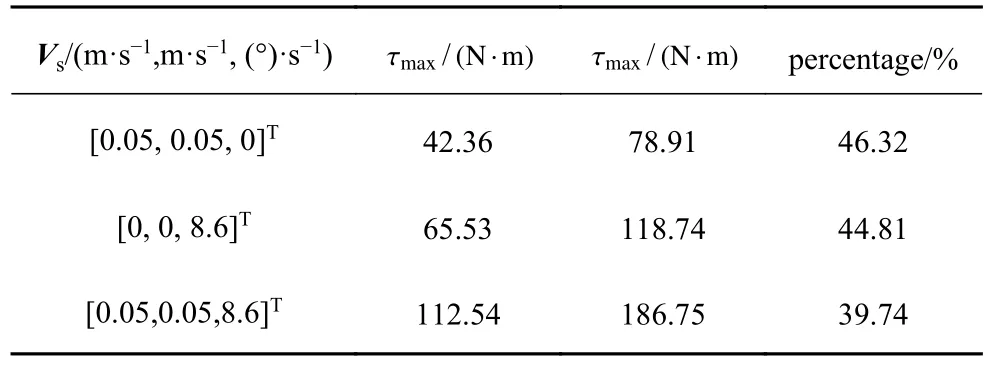
表2 不同卫星速度下SDBD 抗冲击性能对比Table 2 Comparison of impact resistance performance of SDBD at different satellite velocity
由表2 可以可知,在碰撞过程中,对于给定的不同卫星速度,SDBD 均能显著的降低关节所受冲击力矩,且最大可以降低46.32%,因此可以认为其能在碰撞过程对关节起到较好的保护作用.
5.2 非旋转卫星对接操作仿真
为防止对接操作的接触、碰撞给空间机器人带来冲击破坏,载体对接装置一般内置弹簧,当卫星对接装置前部输出力大于弹簧弹力时才可进行对接操作.同时由于控制精度的问题,若直接以弹簧弹力作为末端接触力带入阻抗力学模型中,实际的末端输出力可能小于弹簧弹力,导致对接操作无法进行.因此选取期望输出力的值应略大于弹簧弹力.
假设空间机器人初始静止,其初始位置为q=[10,120,-60,-60,60,60,60]T.目标卫星相对空间机器人的初始速度为=[-0.05,-0.05,0]T.为保护空间机器人,假设在碰撞1.5 s 后开启控制,通过式(15) 解得此时混合体系统的位置、速度分别为:q=[9.05,120.13,-58.95,-61.42,62.46,55.22,62.57]T,=[-0.34,0.082,0.31,0.43,0.74,-0.68,0.76]T.控制器控制参数为: γ1=0.9 ,γ2=1.1 ,μ1=1.2 ,μ2=1.4 ,α=0.6,Λ1=diag(5,5,5,5) ,Λ2=diag(70,120,120,120),=diag(50,50,50,50),=diag(50,50,50,50),=diag(100,100,100,100),仿真时间为25 s.
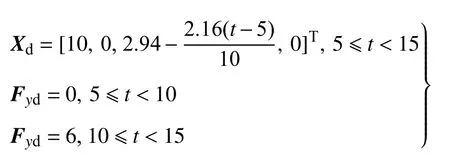
为保证主动对接过程的精确控制,将该过程分为3 个阶段.第1 阶段(0~ 5 s): 镇定控制阶段,关闭力/姿阻抗控制,对捕获卫星后形成的混合体系统进行镇定控制,将载体姿态角与机械臂关节角调整至期望轨迹

第2 阶段(5~ 15 s): 准备阶段,5~ 10 s 关闭阻抗控制,仅进行位姿控制,调整卫星对接装置前部的位姿,使其正对载体对接装置;10~ 15 s 开启力/位姿阻抗控制进行输出力的预加载,且将卫星对接装置前部移动到载体对接装置的正上方
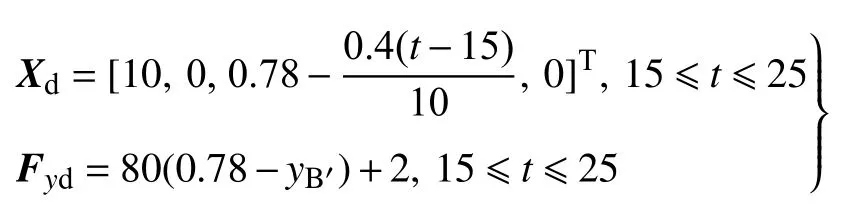
第3 阶段(15~ 25 s),对接阶段,开启力/位姿阻抗控制,卫星对接装置前部沿期望轨迹克服载体对接装置内弹簧弹力完成主动对接操作
为突出所提策略的优点,将其与文献[33]所提的固定时间控制(fixed time control,FTC)进行对比分析,仿真结果如图3~ 图9 所示.由图3~图6 可知,虽然FTC 的收敛速度很快,但其平稳性不足,在加载控制力时载体与对接装置的姿态角波动较大,不利于对接操作;由图7 可知,FTC 与NFTSMC 的输出力矩均能达到期望值,但NFTSMC 的抖振更小,输出力矩较为稳定;由图8 和图9 可知,为了保证快速的收敛速度,FTC 的输出力矩远大于NFTSMC 的输出力矩,且变化频率快,这对电机的性能提出了更高的要求.
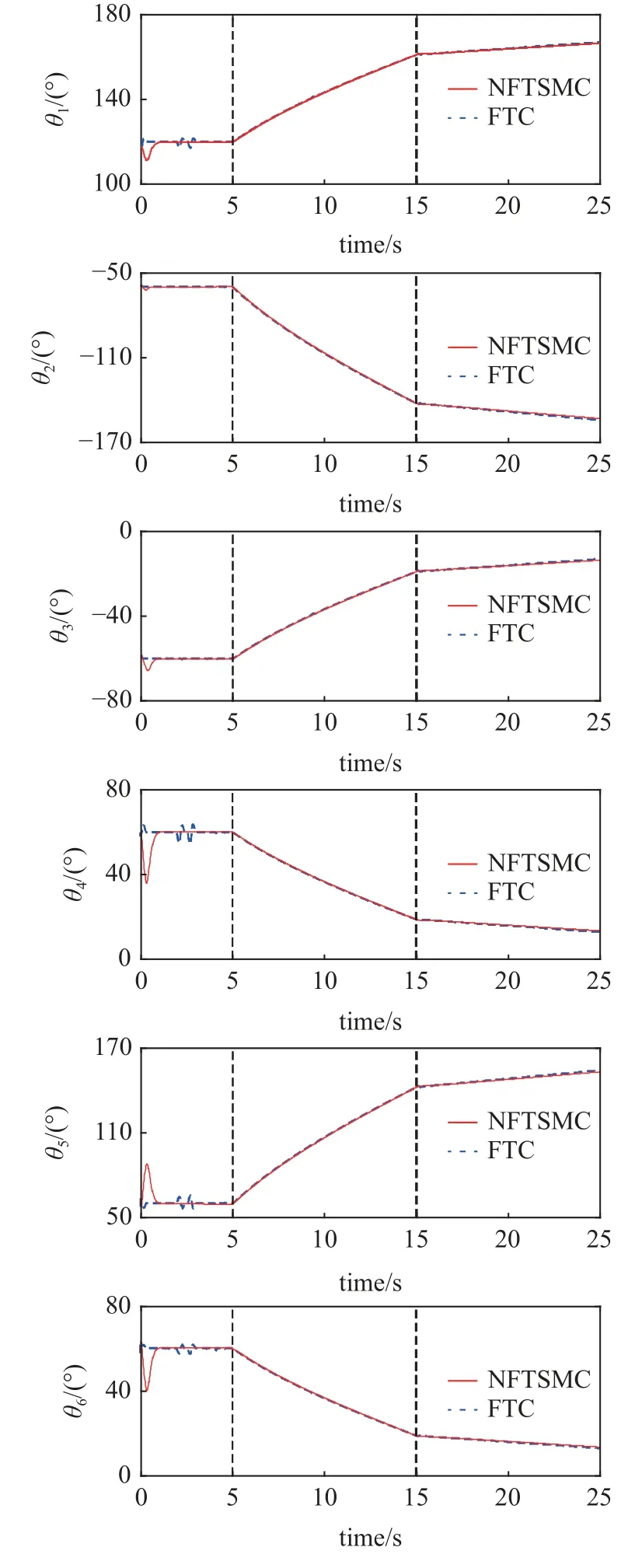
图3 空间机器人关节角轨迹Fig.3 Joint angle trajectory of the space robot
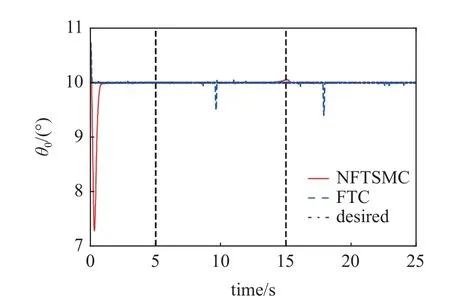
图4 空间机器人载体姿态角轨迹Fig.4 Attitude angle trajectory of the space robot base
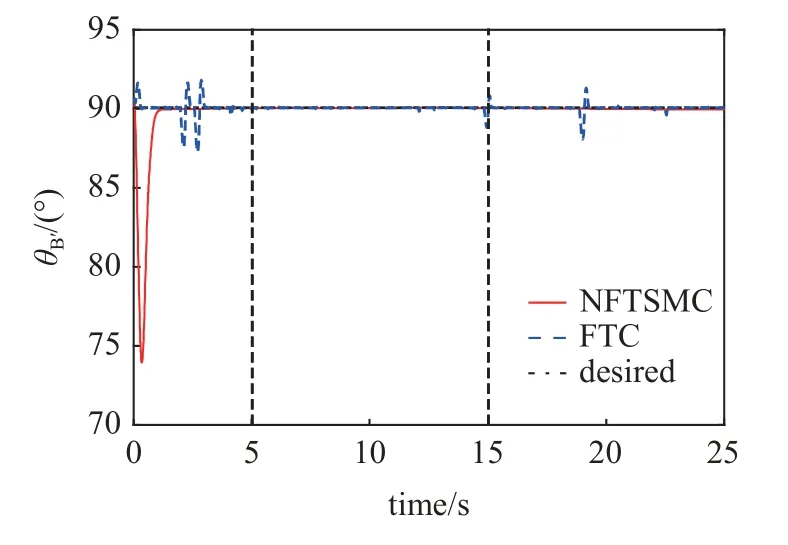
图5 对接装置姿态角轨迹Fig.5 Attitude angle trajectory of the docking device
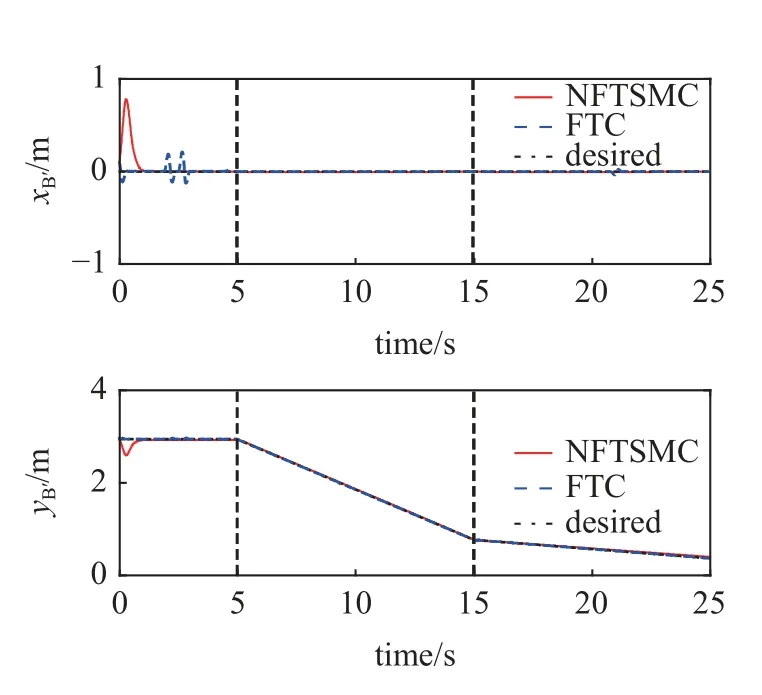
图6 对接装置末端位置Fig.6 Position of the end of the docking device
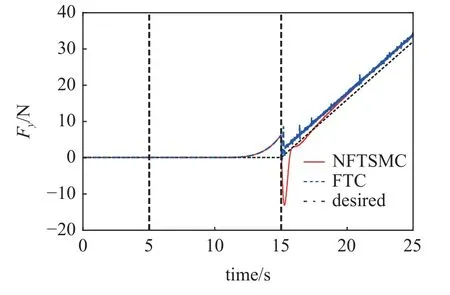
图7 对接装置输出力Fig.7 Output force of the docking device
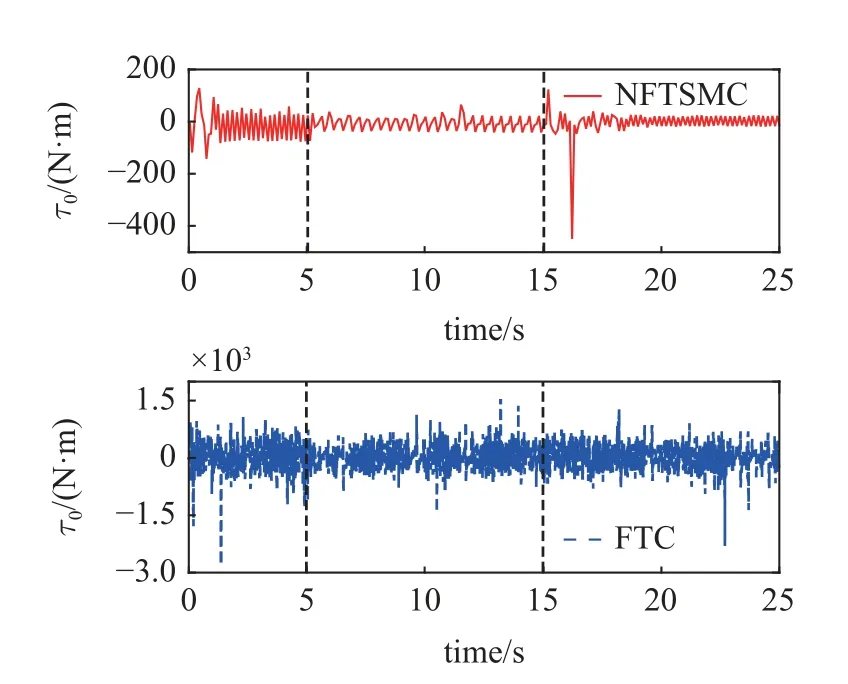
图8 空间机器人载体控制力矩Fig.8 Control torque of the space robot base
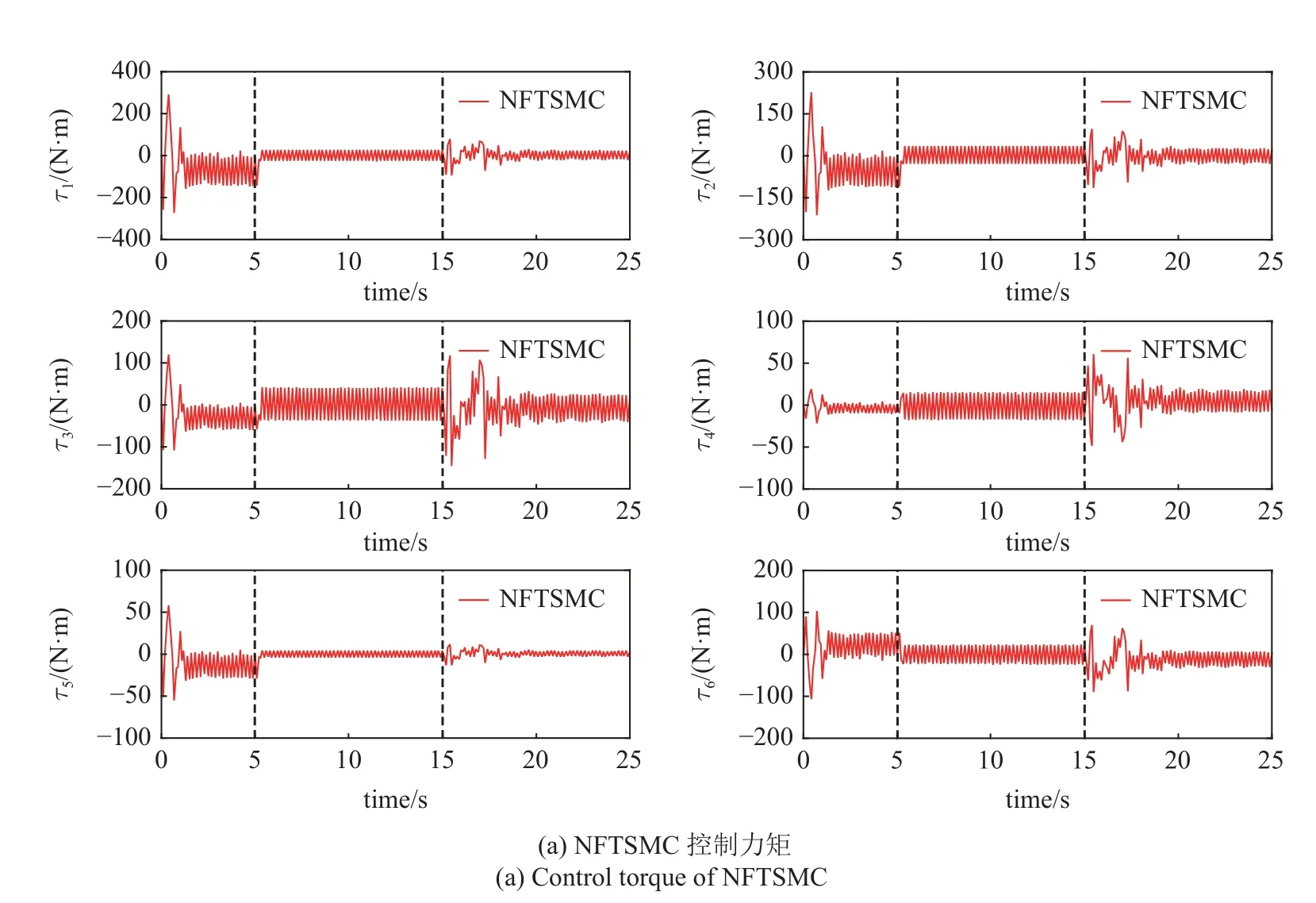
图9 空间机器人关节控制力矩Fig.9 Control torque of the space robot joints
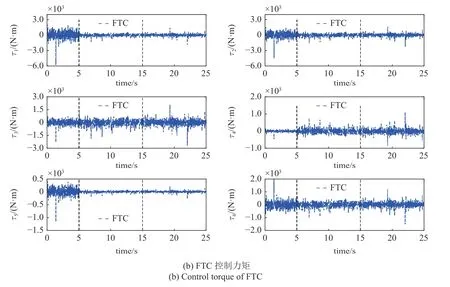
图9 空间机器人关节控制力矩(续)Fig.9 Control torque of the space robot joints (continued)
5.3 旋转卫星对接操作仿真
空间机器人初始位置和速度同第5.2 节,目标卫星相对空间机器人的初始速度为=[0.05,0.05,8.6]T.假设仍在碰撞1.5 s 后开启控制,通过式(15)解得此时混合体系统的状态为q=[10.73,117.82,-58.70,-58.47,57.81,63.93,57.62]T,=[0.54,-0.34,-0.45,-0.36,-0.32,-0.38,-0.43]T.
仿真结果如图10~ 图16 所示.通过图10~ 图14与图3~ 图6 的对比可知,捕获旋转卫星时载体姿态角、对接装置姿态角与其末端位置的控制精度有所降低,但在要求的范围内.对比图14 与图7 可知,由于载体控制精度降低,这也导致了在第3 阶段对接装置前部瞬间输出力比非旋转卫星大,但阻抗控制策略可让其快速的恢复到期望值.
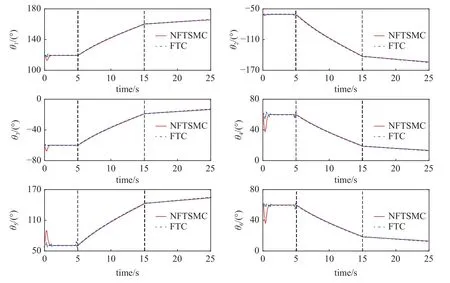
图10 空间机器人关节角轨迹Fig.10 Joint angle trajectory of the space robot
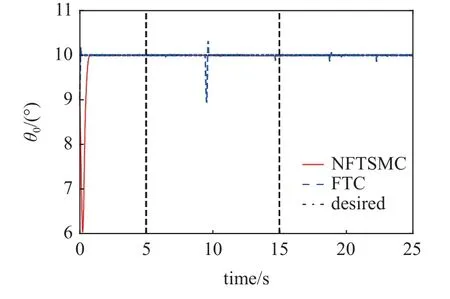
图11 空间机器人载体姿态角轨迹Fig.11 Attitude angle trajectory of the space robot base
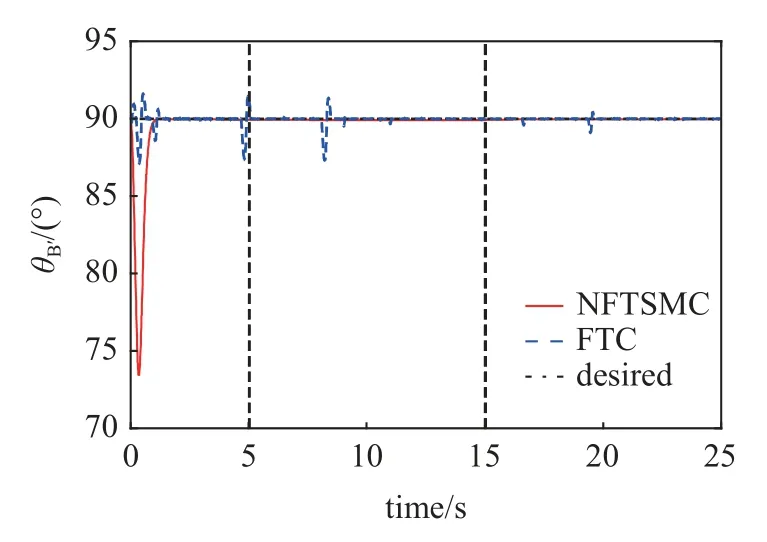
图12 对接装置姿态角轨迹Fig.12 Attitude angle trajectory of the docking device
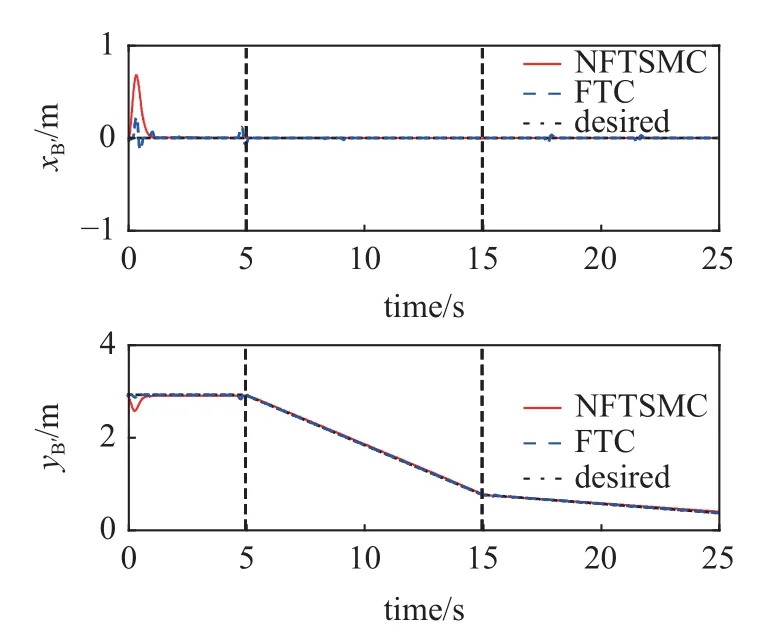
图13 对接装置末端位置Fig.13 Position of the end of the docking device
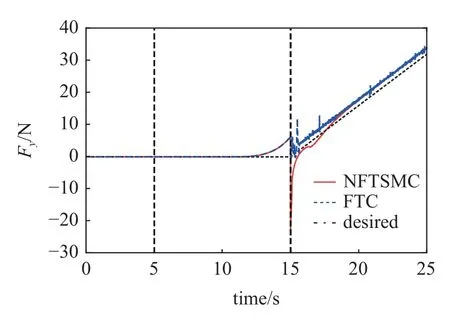
图14 对接装置输出力Fig.14 Output force of the docking device
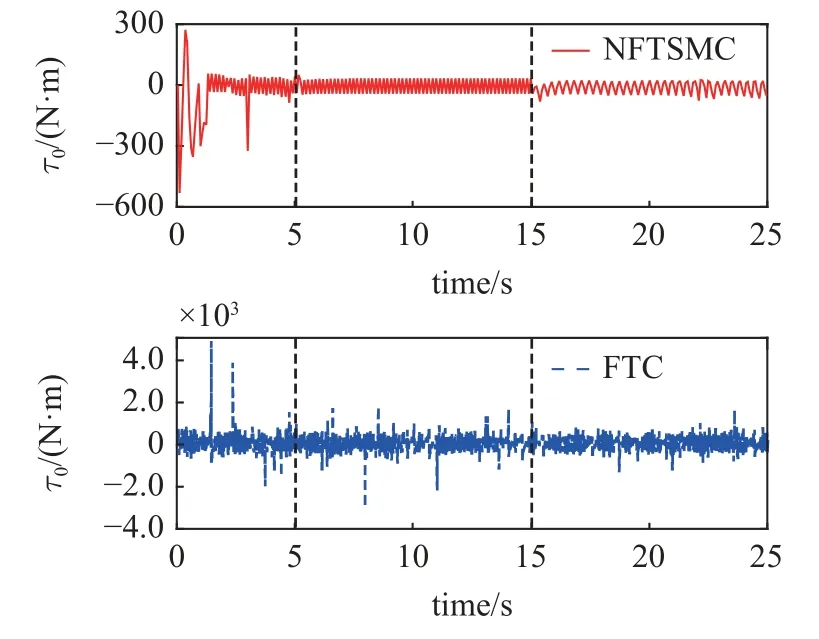
图15 空间机器人载体控制力矩Fig.15 Control torque of the space robot base
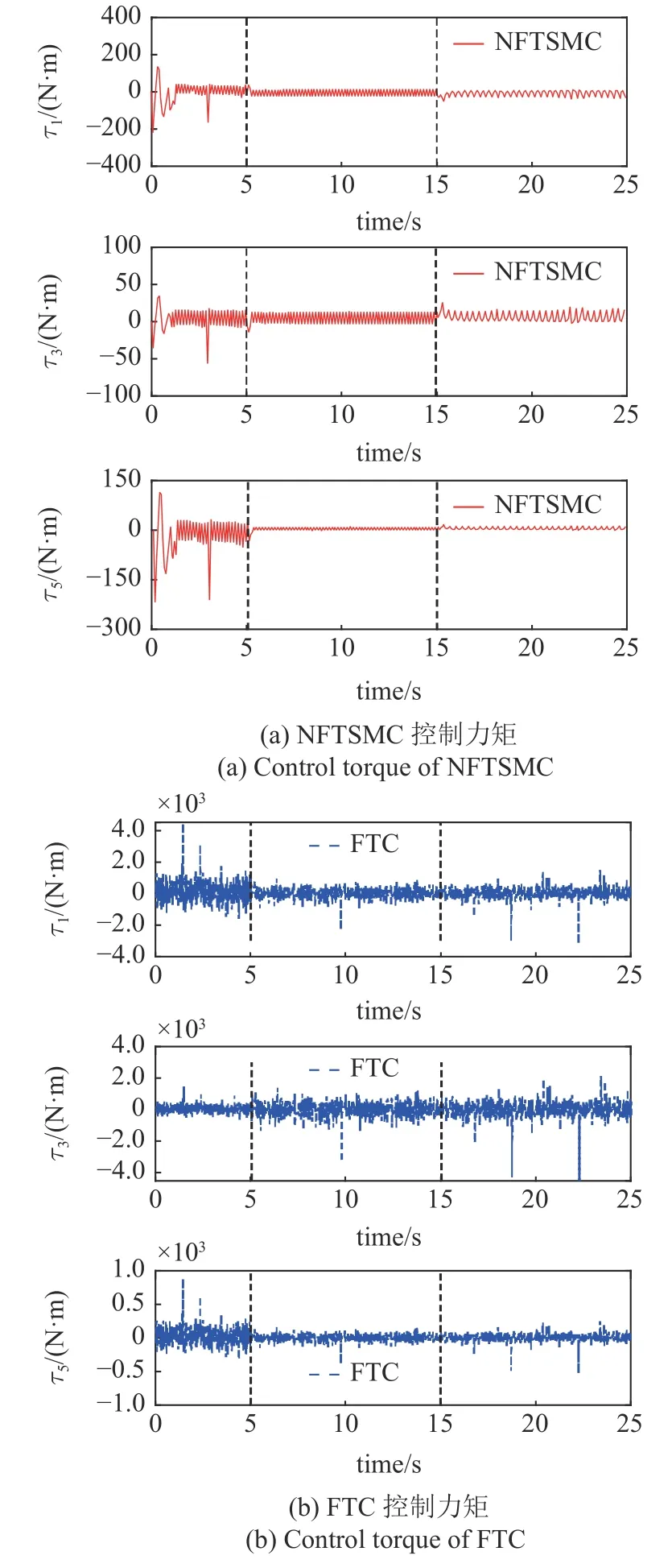
图16 空间机器人关节控制力矩Fig.16 Control torque of the space robot joints
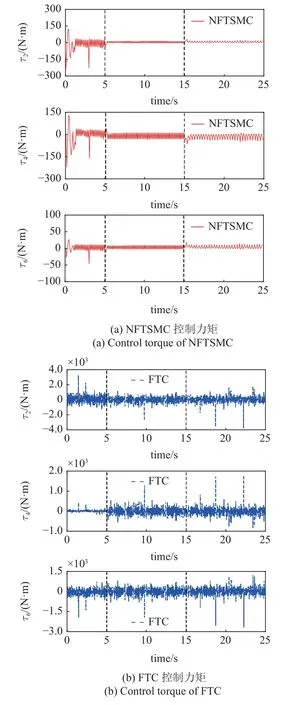
图16 空间机器人关节控制力矩(续)Fig.16 Control torque of the space robot joints (continued)
6 结论
本文研究了双臂空间机器人捕获对接的阻抗控制问题.在机械臂关节处添加了SDBD 避免接触、碰撞过程中关节受冲击破坏;建立闭链混合体系统动力学模型与二阶线性阻抗模型;提出一种非奇异快速终端滑模控制策略实现对接装置前部的力/位姿控制.通过分析可以得出以下结论.
(1) 在关节电机与机械臂之间添加SDBD 可以实现冲击载荷的快速卸载,且不管是捕获仅有线速度、仅有角速度、既有线速度又有角速度的卫星均有缓冲效果.
(2) 结合阻抗控制,卫星对接装置前部可以在基联坐标系内有效跟踪期望位姿并输出稳定力,实现空间机器人的主动对接操作.
(3) 设计的非奇异快速终端滑模控制策略具有非奇异、收敛速度快、控制精度高和防抖振等优点.
数据可用性声明
支撑本研究的科学数据已在中国科学院科学数据银行ScienceDB 平台公开发布,访问地址为http://doi.org/10.57760/sciencedb.j00140.00008或http://cstr.cn/31253.11.sciencedb.j00140.00008.
