混合交通流下的联网自动车辆轨迹控制方法研究
2022-11-05张浩天
张浩天
(上海理工大学 光电信息与计算机工程学院,上海 200093)
0 引言
随着经济的发展,居民出行、货物的运输需求、车辆出行距离、道路上车辆数不断增加,交通安全、道路拥堵、能源消耗等一系列交通问题也随之而来。为了缓解这些交通问题,改善道路的性能,车辆互联技术受到了广泛的关注。随着自动驾驶技术日趋成熟以及联网自动车辆(Connected and Autonomous Vehicle,CAV)逐步普及,基于车辆互联技术在交通方向上的研究开始涉及驾驶行为、通行能力、交通流稳定性、信号控制优化等多个领域。研究人员利用车辆互联技术,使车辆可以通过车对车(V2V)或车对基础设施(V2I)通信构成车联网环境,CAV可以在较小的车头时距下进行协作,通过信息交互协作形成基于队列的驾驶模式。这种驾驶模式被认为是提高道路通行能力的一种重要途径,对提高交通系统安全性,减少能源损耗等方面起到了积极作用。
在交通领域的研究中,对CAV的控制研究是一项重要的课题。研究人员基于高速公路环境开展对CAV的控制研究,Shladover等人对混合了不同渗透率的协同自适应巡航控制(CACC)车辆的单车道高速公路通行能力进行了仿真研究。Jiang等人研究了CAV与普通车辆混合条件下高速公路的高效管理问题。V2I建设水平不断提升促使研究人员开始针对情况更为复杂的交叉口环境进行探索。Guler等人在2014年提出一项针对孤立交叉口的信号控制算法,评估该技术在针对通行能力方面有着长足优势。李磊等人在研究中基于CAV环境改进了2种信号控制交叉口通行能力模型,通过数据仿真检验2个通行能力模型的有效性。由于交叉口情况复杂,导致基于交叉口的研究通常简化了道路环境,例如只研究独立单车道,或设置专用车道,对共用车道的研究较少。其中,直右共用车道作为常见的车道类型出现在相关研究中,黄迪等人以右转机动车穿越相邻车道直行自动车辆行为为例,建立机动车穿越自行车的行为决策模型。赖元文等人依据短右转车道长度、车辆到达的规律等交通特性,建立了短右转车道影响下的直行车道通行能力分析模型。刘美歧等人建立直行右转共用车道,结合转向信号控制探究了模型的通行能力。
针对上文所述的道路环境,本文考虑与共存的混合车流情形,并设置直行与右转共用车道。为模拟复杂的道路情形,会出现随机变道。在可变道区域考虑响应变道,规划可变道区域内的行驶轨迹。在不可变道区域结合交叉口信号灯情况设计轨迹优化方案。最后利用仿真对模型有效性进行验证。
1 车辆互联技术下的信号交叉口系统架构
1.1 交叉口车道模型
本文依据混合车流的现实情况,设计更加贴近实际的多车道混合车辆的轨迹优化模型。本文给出的交叉口车道模型如图1所示,区间[,]内禁止任何车辆变道行为,区间[,]内车辆可以进行强制变道,区间[0,]内车辆可以进行自由变道。
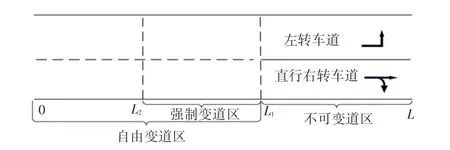
图1 交叉口车道模型Fig.1 Intersection lane model
1.2 车辆与交叉口设置
根据现实生活中的情况,在完全自动驾驶之前,不同智能水平和网络连通性的车辆将在很长一段时间内共享有限的道路资源。因此,对于车辆与交叉口做以下设置:
(1)混合流中设置2种车辆类型。定义为可以向中央控制单元传输车辆信息的车辆,并且可以通过车辆信息规划车辆轨迹。HV定义为仅能传输自身车辆信息,不能通过接收信息进行轨迹优化的车辆。
(2)交叉口设计直右共用车道,右转车辆在红灯期间可以直接通过交叉口。
(3)设置在进入控制区域前已调整到目标车道,根据道路情况会做出变道决策。
2 可变道区域CAV轨迹优化设计
2.1 车辆跟随模型
针对跟随设计,研究人员提出了多种模型进行模拟,这些模型各有优点与不足。本文采用的智能驾驶员(IDM)模型作为的跟随模型。IDM模型由Treiber等人提出,原模型加速度设置包含了自由状态下的加速趋势以及避免与前车冲突的加速趋势。由于本文研究对象为混合车流环境,车辆具有一定的随机性。因此,考虑对原IDM模型进行修改,具体形式如下:


采用Gipps模型作为的跟随模型,通过约束车辆速度避免发生碰撞。考虑本文对速度、加速度等因素的限制,具体表达式如下:


2.2 HV变道概率模型
对于变道而言,需要等待安全变道的车辆间隙,对此需要观测邻近车道上的车辆间距。安全变道如图2所示,本文的安全距离具体表现为变道车辆与目标车道上前车l安全距离s及与后车f的安全距离。 根据运动学定理和车辆的车头距离,变道安全距离的具体内容如下:

图2 HV安全变道Fig.2 Safety lane change of human-driven vehicles
根据前后车辆类型设置不同的最小安全距离,增加车辆反应时间,进一步保障安全系数。此外,本文不考虑车辆变道横向移动的时间,但考虑增加车辆提前加速或减速带来的位移Δx(),需用到的数学公式可写为:

本文中交叉口车辆到达符合泊松分布,那么车头时距服从的是负指数分布。已知负指数分布函数为:

第条车道上任意2辆车之间的车头间距满足安全变道的概率P,可以表示为:

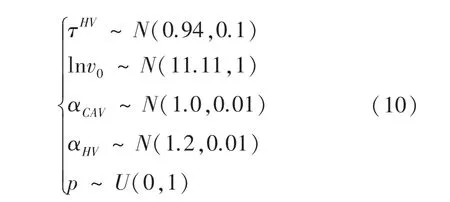
只有当车辆间距离大于安全变道要求,才可能做出变道行为。考虑采用随机数模拟法来确定人工驾驶车辆变道概率的阈值。在上文中可知随机变量包括τ、初始车速、车辆类型等。部分参数设置如下:
基于上述参数假设,人工驾驶车辆变道位置分布是受随机参数影响的高斯分布。选取循环最后一次的数据,通过Matlab中曲线拟合工具得到人工驾驶车辆变道位置分布拟合曲线,如图3所示。变道位置分布符合(419,1013,296,515)。

图3 HV变道位置分布Fig.3 Distribution of lane changing positions of human-driven vehicles
通过蒙特卡洛随机数仿真实验,不断增加循环次数,并对相关数据内容进行统计。人工驾驶车辆变道统计结果见表1。由表1可知,对车辆到达λ取值从0.1至0.3的数据进行统计。对于不同的交通车流量而言,在此模型下人工驾驶车辆变道成功概率基本大于98%,仅少数强制变道未完成,说明交叉口变道区域划分方法可以保证较好的车辆变道完成率。

表1 人工驾驶车辆变道统计Tab.1 Statistics of lane change of human-driven vehicles
2.3 响应变道的协同控制策略
变道使原先的行驶轨迹发生变化。虽然通过预设的车辆跟随模型可以确保安全行驶,但受变道车辆的影响,行驶轨迹会出现走走停停的现象,使交通系统的性能出现下降。根据22节所提出的变道概率模型,为快速实现轨迹修正考虑引入对应的感知机制。引入变量β作为位置相关的变道概率。
在变道标定后,对变道目标车道上前后车为的情况做出相应调整,构建基于变道的协同控制策略。协同控制的目的在于提高行驶的舒适性。本研究只考虑车辆纵向运动,利用文献[17]中车辆纵向运动线性模型,结合车辆反应时间与变道感知机制,推出如下数学公式:

其中,利用反应时间τ表示车辆的惯性延迟,作为系统输入变量表示车辆的期望加速度。通过进一步推导,车辆运动学模型则以状态空间形式来表示,具体内容如下:



其中,diag(A,A,A),diag(B,B,B)。对车辆协同控制建立优化舒适度的目标函数,这里的舒适度评价指标由车辆的加速度平方来表征,运算得到的定义式如下:

对目标函数中参数增加约束条件,具体内容如下:
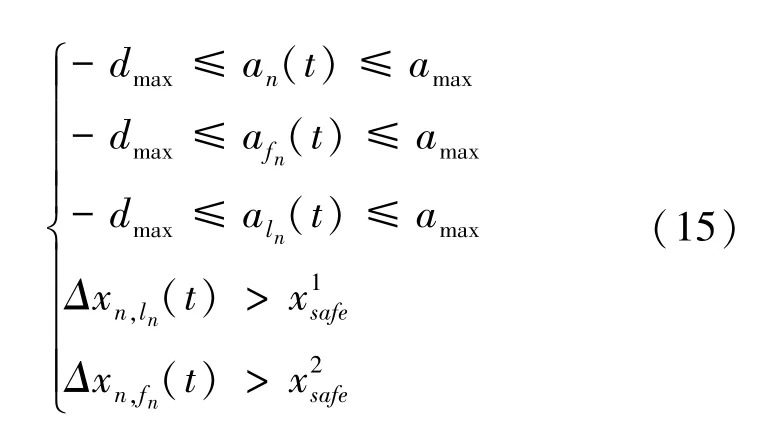
车辆的加速度需要控制在范围以内,若加速度幅度变化较大,必然造成不好的乘车体验。此外,变道车辆与目标车道上前后车之间需要保持安全车间距。为了提高预测控制效果得到光滑且安全的轨迹路径,利用滚动时域估计方法解决变道协同车辆加速度的优化问题。在有限长度的时域内,协同变道车辆对应的预测输出可以表示为:

将车辆的预测输出投射到给定时域上,基于时刻的车辆预测空间状态表达如下所示:
其中,表示车辆每一时刻的状态量;U表示每一时刻的输入变量;M、N分别表示状态变量和输入变量的系数矩阵。
时域内的目标函数与约束条件可以表示为:

其中,W表示时域内目标函数中对应的加速度权重系数,根据车辆类型与变道影响大小设置权重系数分别为0.3、0.3和0.4。随着采样时刻的不断推进,在有限时域内对每一时刻的偏差进行优化计算,可以得到时域内变道车辆与目标车道上协同车辆的最优加速度、即协同控制系统的控制变量:



图4 协同变道轨迹变化Fig.4 Trajectory change of cooperative lane change
3 不可变道区域CAV轨迹优化设计
3.1 CAV预标记处理
对进入不可变道区域的进行预处理,通过对车头间距、瞬时速度以及行驶方向的识别,划分可能形成的车辆队列。设置1.5倍车身长度为标准车头间距,即7.5 m。瞬时速度误差范围设置为0.1。若车头间距,瞬时速度满足条件,且行驶方向相同,则车辆与前车1可划分为同一车队。
完成车队识别后,结合车辆进入不可变道区域的时刻和车辆信息,对车辆数为的车队根据行驶方向分为右转车队与直行车队。对于车队头车而言,依据行驶方向与信号灯情况进行划分,相应释义以及标记见表2。初始化预设标签,将到达的车辆信息和信号灯的状态信息作为输入量,对初始轨迹进行决策判断,依据算法的结果改变初始的标记值。

表2 车辆标记意义Tab.2 Meaning of vehicles marking
3.2 临界车辆的轨迹计算分析
在不可变道区域起点设置检测点,计算临界车辆轨迹。表3是可能用到的参数。

表3 车辆轨迹相关参数Tab.3 Related parameters of vehicles trajectory
3.2.1 绿灯时间到达检测点
绿灯期间的加速临界时间曲线如图5所示。由图5可知。当直行到达检测点时,信号灯为绿灯时间,车辆加速即在绿灯时间结束时通过交叉口。根据运动学定律可以计算得出加速行驶时间,结合车辆前方可能存在的车辆情况得到匀速行驶的时间。临界时刻T可以表示为:


图5 绿灯期间加速临界时间Fig.5 Critical time for acceleration during green light
3.2.2 红灯时间到达检测点
直行联网自动车队在红灯时间到达的情形可以分为2种,情形(1)如图6所示,当直行到达检测点时信号灯为红灯时间,车辆通过加速即在绿灯开启时通过交叉口。考虑车辆在加速阶段以及可能的匀速阶段行驶情况,联网自动直行车辆可以加速至最大速度v,此后保持该速度行驶。车辆的临界时刻T可以表示为:
图6 红灯期间加速临界时间Fig.6 Critical time for acceleration during red light
情形(2)如图7所示,当直行联网自动车队到达检测点时信号灯为红灯时间,车辆通过减速即在绿灯开启时通过交叉口。考虑车辆在减速阶段行驶情况,与车辆加速通过交叉口情况相比,减速到达交叉口的临界时刻显然早于加速到达交叉口的临界时刻。减速至最小行驶速度,此后保持此速度行驶。对应的临界时刻T可以表示为:

图7 红灯期间减速临界时间Fig.7 Critical time for deceleration during red light
3.3 CAV轨迹修正
3.3.1车队轨迹修正
大小为的直行车队可能出现部分车辆通过交叉口,而后续车辆无法通过交叉口的情况。对于该问题,根据定义车队中车辆保持相同行驶轨迹,通过交叉口的时间与头车花费的时间大致相同。因此,可以根据头车的行驶时间判断车队是否能够在剩余绿灯时间内通过交叉口,具体内容如下:

其中,S表示大小为的直行车队中的第辆车;t表示头车通过交叉口花费的时间;表示车队头车进入不可变道区域的时刻。此处,t=t+t可以通过以下方式表示:

由上式可知,t是关于前方队列长度L的变化量。若S有解,直行车队中前辆车能够在该绿灯时间内通过交叉口,剩余车辆S会设计为车队的第二部分。第二部分的车辆会在安全的车辆跟随模型下,进行合理减速,等待下一个绿灯信号开启再通过交叉口。如果S无解,那么表明直行队列所有车辆在此绿灯时间内均不能通过交叉口。
对于无法通过交叉口的第二部分车辆需要进行轨迹的修正。直行车队轨迹如图8所示。由图8可知,车队中第辆车到达检测区域时,发现在该绿灯时间内没有足够的时间通过交叉口,此时总结车队中的车辆轨迹,将该车作为下一个车队的头车考虑,对车辆进行减速控制,直至等到下一个绿灯信号开启后通过。

图8 直行CAV车队轨迹Fig.8 Trajectory of straight CAV platoon
3.3.2 误导轨迹修正
由于直行车辆与右转车辆共用一个车道,且右转车辆可以在红灯时间直接通过交叉口。在红灯时间段跟随的直行可能会响应前车减速,误认为前方车辆在交叉口停止。红灯期间轨迹误导如图9所示。图9中,黑色虚线表示右转车辆实际行驶轨迹,与后续直行联网车辆误认为的前车行驶轨迹,黑色实线表示受误导下的行驶轨迹。针对上述问题,考虑对车辆临界时刻进行修正,将L定义为与通过交叉口的右转车辆数n以及相邻两车的车头距离相关的变量,修正后的红灯时段临界时刻如下:
图9 红灯期间轨迹误导Fig.9 Trajectory of misdirection during red light
3.4 随机减速对CAV轨迹的影响


其中,表示驾驶员做减速操作时速度减小的值,(0,1)为均匀区间(0,1)上产生的随机数。随机减速影响跟随的车队头车轨迹,进而影响对后续的标记值。标记算法需要对临界时刻计算从检测点开始实时更新,对等效排队长度做出如下修正:

3.5 CAV标记控制方法
根据标记算法,可以在进入检测点时快速规划车辆的行驶轨迹,进而根据车辆标记情况对车辆的速度进行相应的控制,快速给出不同的驾驶意见。车队标记与控制部分流程为:
当到达检测点时,记录车辆速度与当前时刻信息。
根据3.1节的计算方法,从车头时距与瞬时速度两方面进行车队识别,满足条件的车辆组成车队。
根据到达检测点时的信号灯信息,以及的类型进行分类。
根据到达检测点的时刻信息,与32节设计的临界时刻进行比较,对进行标记识别。
无法在绿灯时间内全部通过交叉口的车队,根据3.3节进行计算判断,对车队行驶轨迹进行提前修正。
根据设计的轨迹,结合车辆跟随模型行驶。
4 仿真与比较
4.1 仿真参数设置

4.2 仿真实验
本节首先基于混合车流环境的轨迹控制方法探究在仿真周期内车辆排队等待数量。考虑交叉口方向上车辆的到达符合数学期望为的泊松分布。车辆等待数的比较结果如图10所示,记录仿真1200 s内不同λ取值下信号灯变化截止时刻交叉口等待的车辆数。当0.10、0.15时,模型可以很好地确保交叉口车辆等待数量不高于20辆。随着仿真周期数增大,车辆等待数量呈现下降趋势,可以预见当仿真时间到达某一时刻,车辆等待数量将会稳定在一个较小的数值。当0.25时,车辆排队等待现象已较为明显,同时随着仿真时间增加并未能出现显著下降,说明在此交通流规模下模型带来的增益效果已经不太明显。当车辆量继续增大、即0.3时,从图10中可以看到交叉口出现大量排队车辆,在1080 s时等待车辆数量不降反升,说明对单个交叉口的控制已经很难优化调度这种规模的车流量,需要考虑多车道、多交叉口的协同控制。

图10 车辆等待数的比较Fig.10 Comparison of vehicles waiting number
为进一步分析λ取值对交通系统带来的影响,接下来从车辆平均行驶时间T、平均停车延误时间T和舒适度DC三个角度测试在不同车流量下的表现。其中,舒适度DC方法推导的数学公式见如下:

表4记录了不同λ取值下3种参数指标的变化过程,可以发现数值记录内容符合图11中的曲线。

表4 3种参数指标在不同交通流量下的比较Tab.4 Comparison of three parameter indexes under different traffic flow

图11 马尔科夫模型Fig.11 Markov model
当0.10,0.15时,车辆平均停车延误与舒适度基本保持在一个较好的水平,平均停车延误增加比率远小于平均行驶时间的增加比率,说明交通系统尚能维持一个较好的通行能力,相同的结果也同样反映在通行的舒适度上。当0.25时,车辆平均行驶时间没有显著增长,但平均停车延误和舒适度分别增长了10.91%和46.34%,直观显示了该交通流量下交通系统承载的压力。当0.30时,各项参数大幅增长,本文设计模型很难带来显著的效果增益。
上述实验默认了车辆行驶方向的比重以及的渗透率。现实情况下车辆的到达信息会依据实验的默认值大小发生相应变化。引入马尔科夫模型描述两车道车辆信息的变化情况。模型的2个状态0和1分别对应车道1与车道2,系统状态转移概率分别为、、、。 根据混合车流下的轨迹优化模型设计,为直行与右转的概率,为左转的概率,为左转的概率,为直行和右转的概率。依次得出对应的马尔科夫模型状态转移概率。考虑改变渗透率,以0.20作为增量不断提高在车流量中的比重,其他参数保持默认值。图12反映了相关参数指标随渗透率变化的情况。以未采用本文优化方法的情形作为基准值,表5给出了3种参数指标反映模型在性能上的增益效果。数据表明渗透率到达0.4时,模型对交通系统产生的增益效果开始体现,平均延误时间与舒适度都相比未采用本文设计方法的情形有了极大的提升,在平均行驶时间上也有了不错的改进效果。此后,随着渗透率的不断提升,各项参数均得以进一步提升。说明模型可以适应自动驾驶技术发展的水平,在低渗透率和高渗透率下均可以起到优化轨迹、提升交通系统能力的作用。

图12 不同渗透率下相关参数的变化Fig.12 Variation of related parameters under different permeability

表5 随渗透率变化的评价指标减少百分比Tab.5 Percentage reduction of evaluation index with permeability change
本文一车道的不可变道区域为直行右转共用区域,右转车辆会对后续车辆有较大影响,进而影响整个交通系统。这里为分析右转车辆在交通流量中所占比重对交叉口的影响,改变右转概率p,以0.2作为增量不断提高右转车辆在交通流中的比重。以未采用本文优化方法的情形作为基准值,表6给出了3种参数指标反映模型在性能上的增益效果。将数值在图13上做出直观展示,当右转车辆比重在0.2~0.6范围内平均行驶时间增益基本保持恒定。比重到达80%后,平均行驶时间增益达到了15.22%。平均停车时间增益总体上随着右转车辆比重的增加而增加,到达0.6左右时增益效果基本维持恒定。

图13 不同右转概率下的目标参数增益Fig.13 Target parameters gain under different right-turning probability

表6 随右转概率变化的评价指标减少百分比Tab.6 Percentage reduction of evaluation index with rightturning probability
原因在于,虽然右转车辆可以直接通过交叉口,避免了车辆停止等待。可是一旦右转车辆前方出现了停车等待的直行车辆,不可避免地需要等待下一个绿灯时间开启才能通过。在行车舒适度上,转向车辆比重的增加使得为到达目的地而出现的强制变道数量增加,强制变道会极大地影响交通系统中车辆的行驶,为避让车辆强制变道而出现的加减速次数将会增加。此外,右转车辆在通过交叉口之前需要减速转弯。综合几项因素,右转车辆比重的增加对车辆通行影响较大,右转车辆比重控制在40%以下比较合适,若超过这个范围需要考虑增设直行车道或右转车道进行分流。
5 结束语
智能交通是未来交通系统的发展趋势,车辆自动驾驶是发展智能交通系统的重要领域,实现在复杂交通环境下对轨迹进行优化是一项重要的研究课题。本文就混合车流环境下的轨迹优化开展了相应的研究,为适应复杂道路环境下的车辆轨迹综合控制,将道路划分为不同区域,建立了分区域的轨迹优化模型。在可变道区域响应变道以优化行驶舒适度为目标,建立协同控制策略。在不可变道区域结合交叉口信号灯情况对标记识别,使车辆快速通过交叉口,减少信号灯时间浪费。实验结果表明,本文设计模型适用于各个渗透率的车流环境。设计方案在减少车辆行驶时间、停车延误时间,提高行车舒适度上均有较好的效果。通过敏感性分析得出模型最优的控制环境为右转车辆比重40%以内,车流量在1080 veh/h以内。本文集中研究单个交叉口混合车流环境下的联网车辆轨迹优化,接下来应该考虑构建更加复杂的交通环境,研究多交叉口、多车道的协同控制方法即已成为下一步的工作重点。
