基于六旋翼无人机的定量供种离心式水稻播种装置设计与试验
2022-11-04彭永福刘兆朋陈雄飞刘木华周博聪余佳佳刘俊安余国栋
彭永福,刘兆朋,陈雄飞,刘木华,周博聪,余佳佳,刘俊安,余国栋
(江西农业大学 江西省现代农业装备重点实验室/工学院,江西 南昌 330045)
【研究意义】南方丘陵和水网平湖交织区域是我国重要的水稻生产基地。南方丘陵地形复杂,田块细碎,坡多埂多,形状不规则,造成水稻种植机具下田作业难及作业效率低[1];水网平湖交织区域泥脚深,现有高速乘坐式和步进式水稻种植机具易陷车,进而导致作业效率低。因此,亟需研发适宜南方丘陵及水网平湖交织区域田块的新型水稻种植装备,以提升区域水稻种植机械化水平。【前人研究基础】多旋翼农用无人机具有机动性强、作业效率高、不受地形限制等优势,其发展迅速,已在农业植保方面得到广泛应用[2-6]。为破解南方丘陵及水网平湖交织区域田块对传统水稻种植机具的限制,国内外诸多学者[7-12]以多旋翼无人机为载体,开展了无人机水稻飞播研究。宋灿灿等[13]设计了一种气力式无人机水稻撒播装置,分析了分流箱出口尺寸和风速的关系,明确了导流通道锥角对撒播幅宽和均匀性的影响;彭冬星[14]设计了一种无人机搭载的圆盘式水稻撒播机,分析了落种点位置、圆盘转速和开口大小对撒播效果的影响,其工作效率每分钟可达0.97单位面积(667 m2);周龙[15]设计了双螺旋式水稻直播机,确定了最佳参数为双螺旋转速600 r/min 和甩盘转速300 r/min;李蒙良[16]设计了带挡环的离心水稻直播机,开展了离心抛洒盘转速、作业高度和挡环角度对横向变异系数的影响;陈雄飞[17]设计了一种离心摆管式水稻播种无人机;包胜军等[18]设计了一种闸门控制装置调节无人机飞播播量,以改善水稻种子受飞行姿态影响而出现播量不稳定的情况;深圳市大疆创新科技有限公司、广州极飞科技股份有限公司、羽人无人机(珠海)有限公司等企业均研发了水稻无人机飞播样机。【本研究切入点】基于多旋翼无人机的飞播装置的播撒性能需进一步提升,尤其是播量有效调节和播种均匀性仍有待于深入研究。【拟解决的关键问题】本研究以3WWDZ-16A 六旋翼无人机为载体,基于螺旋定量供种和离心排种的技术思路,设计一种定量供种离心式水稻播种装置。理论计算确定种箱、定量供种螺旋、离心圆盘等结构参数,并通过飞播试验和田间试验,明确定量供种离心式水稻播种装置工作性能的影响因素及最优工作参数组合,以期为基于多旋翼无人机的水稻播种装置设计和研究提供参考。
1 材料与方法
1.1 定量供种离心式水稻播种装置结构和工作原理
1.1.1 总体结构基于螺旋定量供种和离心排种的技术思路,以3WWDZ-16A 六旋翼无人机(江西省南昌市新和莱特科技有限公司)为载体,设计了一种定量供种离心式水稻播种装置(图1)。该装置主要由种箱、定量供种螺旋、种箱-圆盘固接圆筒、播种装置、螺旋驱动电机、圆盘驱动电机等组成。其中种箱通过挂接铝柱与无人机下端固定连接,螺旋驱动电机固定安装在种箱十字支撑架上端,定量供种螺旋上端通过轴与螺旋驱动电机固接,且置于种箱-圆盘固接圆筒内,播种装置通过种箱-圆盘固接圆筒安装在定量供种螺旋正下方,圆盘驱动电机通过圆盘轴固接在播种装置正下方。

图1 基于六旋翼无人机的定量供种离心式水稻播种装置Fig.1 Structure of centrifugal rice spreading device based on UAV
1.1.2 工作原理起飞前,打开种箱两侧的进种口,将破胸露白的水稻芽种添加进种箱内;根据飞行高度与播撒幅宽要求,设定圆盘驱动电机转速;根据飞行速度、播撒幅宽及播量要求,调节供种螺旋驱动电机转速;同时规划无人机作业路径。起飞后,按照设定的转速,先启动圆盘驱动电机,后启动螺旋驱动电机,带动供种螺旋和播种装置回转;进而按照规划作业路径,进行无人机飞播。飞播过程中,种箱内的稻种在定量供料螺旋的作用下,将稻种定量输送至播种装置上,离心圆盘叶片将稻种均匀撒播到田间。
1.2 关键结构设计
1.2.1 种箱根据水稻播种量农艺要求,667 m2杂交稻播种量为1.5~2.5 kg,667 m2常规稻播种量为3~5 kg,无人机续航时间为10~15 min,因此,无人机搭载的种箱容积为:

式(1)中:V为种箱容积大小,L;S为单次飞行播种面积,hm2,S=0.72 hm2;G为水稻播种量,kg/hm2;ρ为水稻堆积密度,t/m3。
以江西稻区典型长粒型杂交籼稻万象优华占、中粒型常规籼稻黄华占和短粒型杂交粳稻甬优12 为供试品种,催芽至破胸露白后测试稻种机械物理特性参数,如表1所示。代入式(1)中,计算确定种箱容积为17 L。
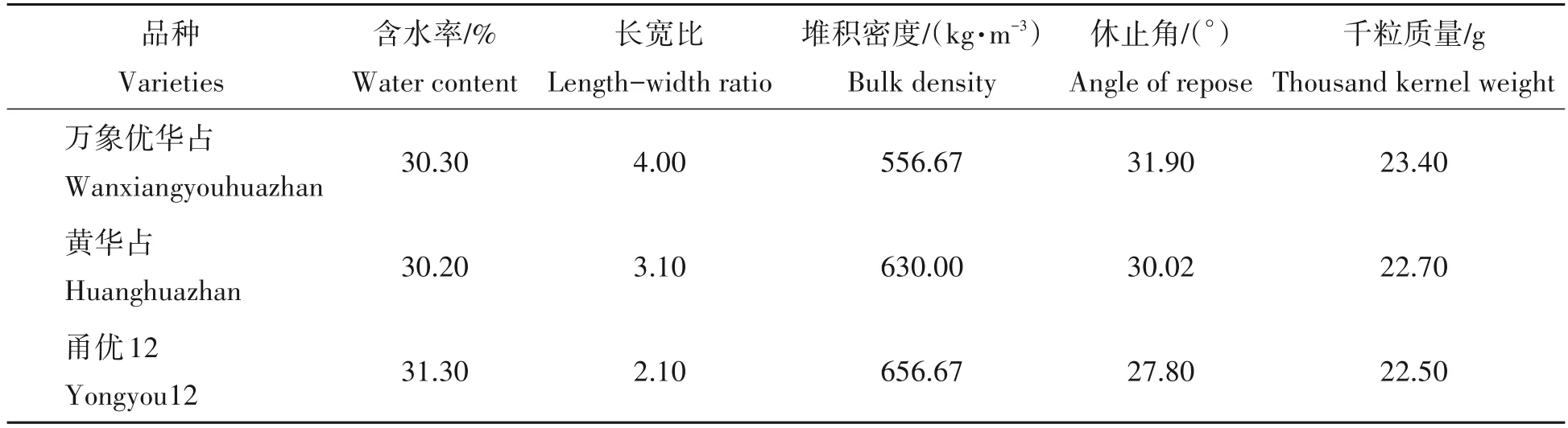
表1 不同水稻芽种的机械物理特性参数Tab.1 Mechanical and physical characteristic parameters of different rice varieties
1.2.2 定量供种螺旋及供种稳定性试验为保证播种装置供料连续均匀,采用螺旋装置定量供种,而定量供种螺旋的结构和运行参数直接影响供种性能和播种均匀性(图2)。研究结果表明,定量供种螺旋采用垂直布置方式更恰当,其关键参数可由式(2)[19-20]计算可得。

图2 离心式播种装置排种速率及变异系数与转速关系曲线Fig.2 Relationship between Seeding rate and Coefficient of variation and rotating speed of screw

式(2)中:D为定量供种螺旋直径,m;K1为水稻特性系数,取值0.049;Q为螺旋输送能力,t/h,取值0.32;φ为填充系数,取值0.30;ρ为水稻堆积密度,t/m3,取值0.60;C为定量供种螺旋倾角系数,取值1.00;P为定量供种螺旋螺距,m;K2为水稻流动性参数,取值0.90;ω为螺旋角速度,rad/s;R为螺旋叶片直径,m;nmax为定量供种螺旋最大转速,r/min。
经计算定量供种螺旋直径D≥0.062 m,nmax=200 r/min。为明确离心式水稻播种装置的供种均匀性,参照JB-T 62741.1—2001《谷物播种机技术条件》,以排种速率及其变异系数为评价指标,以长粒型杂交籼稻万象优华占、中粒型常规籼稻黄华占和短粒型杂交粳稻甬优12为供试品种,开展定量供种螺旋的供种稳定性试验。试验时,将供试品种浸泡24 h 后,放置人工气候箱内,催芽至破胸露白,晾干表面水分后,加入离心式水稻播种装置的种箱内,统计定量供种螺旋在转速20~100 r/min条件下的排种速率,每个处理重复5次。
由图2可知,就供试品种万象优华占、黄华占和甬优12而言,排种速率与螺旋转速呈线性关系,相关系数均高于0.99;排种量变异系数最大值分别为1.63%、1.75%和1.08%,最小值分别为0.32%、0.39%和0.32%,均满足谷物撒播标准。为此,定量供种螺旋转速在20~100 r/min,其排种性能稳定,可为播种装置的离心圆盘定量供种,保证其播量稳定性。
1.2.3 播种装置已有研究[21]表明:离心式播种装置的离心圆盘叶片直接影响撒播水稻的初始速度、运动轨迹和有效幅宽,为保证无人机飞播水稻的实际落种数量、分布均匀度和有效幅宽,其离心圆盘直径可设为20 cm,转速设为600 r/min,叶片数量设为4 片,并呈十字型对称分布(图3)。

图3 离心圆盘结构Fig.3 Schematic structure of centrifugal disc
1.3 无人机飞播试验
1.3.1 试验设计为明确定量供种离心式水稻播种装置的工作性能,以前进速度、作业高度和螺旋转速为自变量,以长粒型杂交籼稻万象优华占、中粒型常规籼稻黄华占和短粒型杂交粳稻甬优12 为供试品种,根据表2 设置因素水平,开展全因素飞播试验,结果见图4。试验时,采用4行8列布置采样点,每个采样点放置塑料收集盒内置湿润土壤,防止稻种产生弹跳,影响种子分布均匀度,采样点间隔为0.30 m×0.50 m;采样区域外设置起落缓冲带,试验后统计采样点实际落种数。

表2 基于六旋翼无人机的水稻播种装置作业参数表Tab.2 Operational parameters of flight experiment based on UAV

图4 无人机播种试验Fig.4 Seeding performance test based on UAV
1.3.2 评价指标参考MH/T 1002.2—1995《农业航空作业质量技术指标》,选择种子分布均匀度、实际落种量误差和有效幅宽为评价指标,其中有效幅宽是指无人机播撒作业中落种密度达到生产上所要求的播幅宽度,种子分布均匀度采用落种量的变异系数来表示,实际落种量误差计算公式如下:

式(3)中:E为实际落种误差,%;N1为实际单位面积水稻种子数;N为理论单位面积水稻种子数。
2 结果与分析
2.1 作业高度、前进速度和螺旋转速对落种量的影响
由图5、图6、图7可知,就供试品种长粒型杂交籼稻万象优华占、中粒型常规籼稻黄华占和短粒型杂交粳稻甬优12而言,沿着无人机前进方向落种量最大,两侧播种量逐渐减少;当定量供种螺旋的转速越大,落种量和有效播幅宽度也随之增大;且无人机作业高度和前进速度对作业幅宽、分布均匀度和落种量影响明显,当无人机作业高度和前进速度越大,作业幅宽增大,落种量减少,分布均匀度提高;而在相同的前进速度和作业高度下,定量供种螺旋的转速越大,落种量越多,分布均匀度提升明显。

图5 不同工作参数无人机飞播万象优华占的落种量Fig.5 Seeds number of broadcasting Wanxiangyouhuazhan in different operational parameters

图6 不同工作参数无人机飞播黄华占的落种量Fig.6 Seeds number of broadcasting Huanghuazhan in different operational parameters
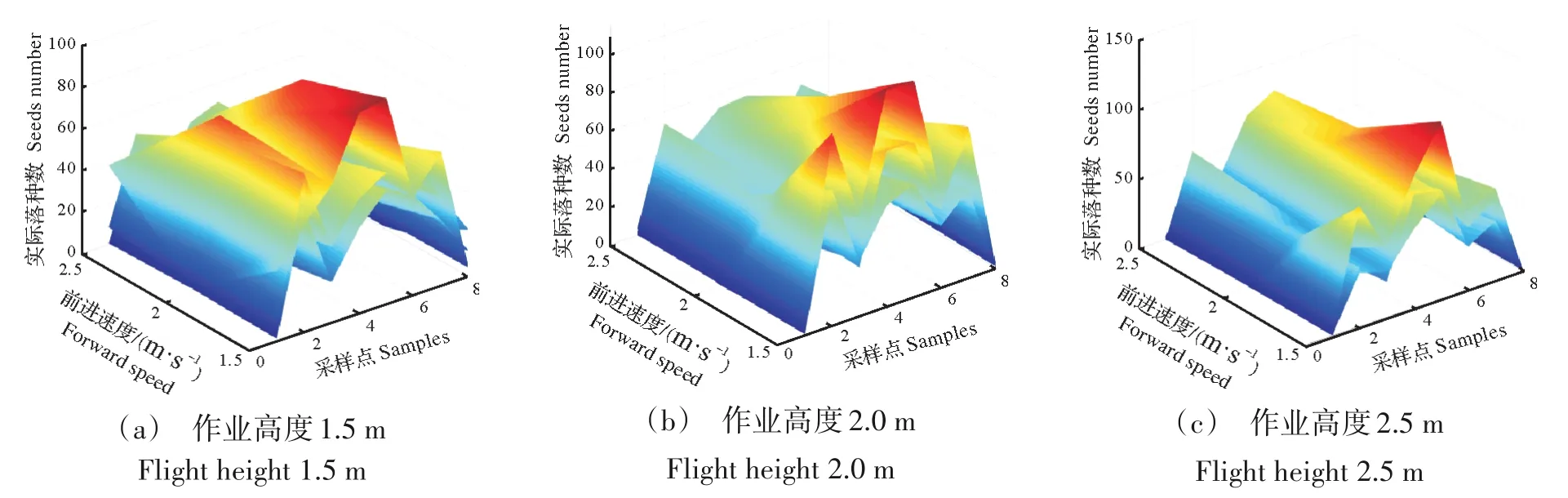
图7 不同工作参数无人机飞播甬优12的落种量Fig.7 Seeds number of broadcasting Yongyou12 in different operational parameters
2.2 作业高度、前进速度和螺旋转速对分布均匀度及实际落种量误差的影响
为分析该离心式水稻播种装置工作性能,分别将无人机作业高度、前进速度和螺旋转速3个因素按照从小到大顺序统计试验样本值,获得无人机播种水稻的种子分布均匀度和实际落种量误差曲线(图8、图9)。
(1)分布均匀度。由图8可知,无人机在前进速度1.5~2.5 m/s和作业高度1.5~2.5 m条件下,3个供试品种的分布均匀度集中于10%~35%,整体低于行业参考标准40%,且由低到高的次序为:万象优华占、黄华占和甬优12。就供试品种万象优华占而言,无人机前进速度1.5 m/s,作业高度为2.5 m 和螺旋转速为50 r/min 条件下,分布均匀度最大样本值为36.38%;就黄华占而言,前进速度1.5 m/s,作业高度为1.5 m 和螺旋转速为30 r/min条件下,分布均匀度最大样本值为38.61%;就甬优12而言,前进速度为1.5 m/s、作业高速1.5 m和螺旋转速为30 r/min条件下,分布均匀度最大样本值为47.49%。
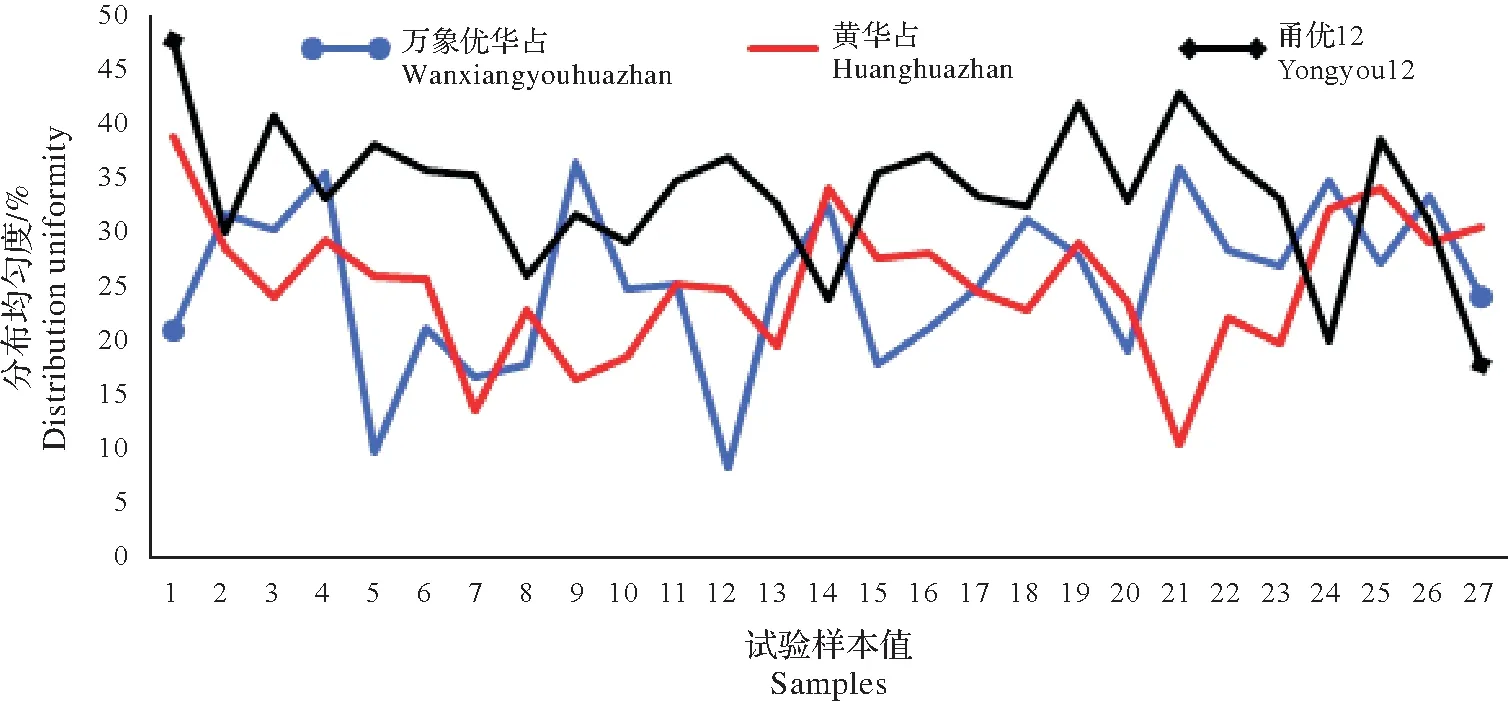
图8 无人机飞播水稻的分布均匀度Fig.8 Distribution uniformity of seeding rate based on UAV
(2)实际落种误差。由图9可知,无人机在前进速度1.5~2.5 m/s和作业高度1.5~2.5 m条件下,3个供试品种的实际落种量误差范围为0~25%,且由低到高依次为:万象优华占、黄华占和甬优12。就供试品种万象优华占而言,前进速度为1.5 m/s,作业高度为2.5 m 和螺旋转速为30 r/min 条件下,实际落种量误差最大样本值为32.73%;就黄华占而言,前进速度2.0m/s,作业高度为2.5 m 和螺旋转速为30 r/min 条件下,实际落种量误差最大样本值为28.00%;就甬优12而言,前进速度为1.5 m/s、作业高速2.5 m 和螺旋转速为30 r/min条件下,实际落种量误差最大样本值为33.73%。
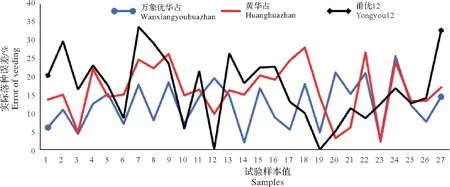
图9 无人机飞播水稻的实际落种量误差Fig.9 Error of seeding rate based on UAV
因此,基于多旋翼无人机的定量供种离心式水稻播种装置可实现对不同品种水稻的均匀播种,但其前进速度、作业高度和螺旋转速均会直接影响分布均匀度及实际落种量误差;就3个供试品种而言,较低的前进速度和螺旋转速会增大分布均匀度及实际落种量误差,作业高度低则影响分布均匀度,作业高度过高则影响实际落种量误差,则可获取最优作业参数为前进速度为2.0 m/s,作业高度为2.0 m 和螺旋转速为30 r/min。
此外,供试品种甬优12 分布均匀度和实际落种误差均高于万象优华占和黄华占,主要由于甬优12的流动特性更好,导致定量供种螺旋的自锁性能变差,定量供种性能不稳定,但设计的播撒装置均可满足3个供试品种的均匀撒播。
2.3 作业高度、前进速度和螺旋转速对有效幅宽的影响
以无人机前进速度x1、作业高度x2和螺旋转速x3为自变量,将无人机飞播万象优华占、黄华占和甬优12 有效幅宽y1、y2和y3作为目标函数,分别建立其拟合方程,如式(4)、(5)和(6)所示,其决定系数R2分别为0.93、0.94和0.94(图10)。

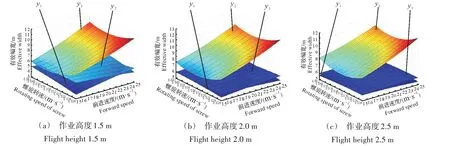
图10 无人机在不同作业高度下的有效幅宽Fig.10 Broadcasting effective width based on UAV
结果表明:就3个供试品种而言,无人机飞播作业的有效幅宽受作业高度、前进速度和螺旋转速影响较明显。其中无人机作业高度影响较大,当无人机作业高度为1.50 m 时,有效幅宽明显受影响;当无人机作业高度超过2.00 m时,无人机飞播万象优华占和甬优12的有效幅宽差异性较小,而无人机飞播黄华占可获得更大有效幅宽。因此,为了保证无人机飞播作业效率和质量要求,落种量受到飞行速度和有效幅宽的影响较大,当无人机前进速度越快,有效幅宽越大,则作业效率越高。综上所述,基于多旋翼无人机的定量供种离心式水稻播种装置推荐其作业高度高于2.0 m。
2.4 田间试验
为验证该装置对不同水稻品种的适应性和工作性能,以明确其实际飞播作业效果,于2020年4月6日在江西省宜春市袁州区开展无人机飞播野香优2 号(千粒质量26.10g,长宽比3∶10)的田间试验(图11)。试验前期田块耕整处理与当地直播处理保持一致;水稻种子清选后浸泡24 h,催芽至破胸露白,晾干表面水分后播种。无人机作业参数为:作业高度2.00 m,前进速度2.00 m/s,螺旋转速为20 r/min,计算理论飞播密度为100 粒/m2。采用基于六旋翼无人机的离心式水稻精量播种装置播种后,沿横纵2 个方向随机选取9 个1 m×3 m 的采样点,采样面积与飞播试验保持一致,统计出苗数,计算播种量变异系数,实际落种量误差,验证该装置的播种性能。

图11 无人机飞播田间试验Fig.11 Field experiment
试验结果表明:有效幅宽为6.00 m 单位面积实际落种量为95 粒,比理论值小5.00%,实际播种量变异系数为18.70%;实际落种量误差为13.64%,均满足无人机飞播谷物的行业标准要求和水稻播种的农艺生产要求。
3 结论
基于3WWDZ-16A 六旋翼无人机研制了一种与之配套的定量供种离心式水稻精量播种装置,建立了定供种螺旋供种量模型,确定了种箱容积、定量供种螺旋直径和离心圆盘临界转速;结果表明:就万象优华占、黄华占和甬优12 而言,定量供种螺旋转速在20~100 r/min 与供种量之间呈线性关系,其决定系数均为0.99,变异系数低于1.75%,能实现对不同长宽比水稻的定量播种要求。
根据无人机前进速度(1.50~2.00 m/s)、作业高度(1.50~2.00 m)和螺旋转速(30~50 r/min)开展了全因素飞播试验,并构建了无人机飞播有效幅宽与前进速度、作业高度和螺旋转速的数学模型。结果表明:作业高度、前进速度和螺旋转速直接影响落种量及有效幅宽,且实际落种量误差随着前进速度增大而逐渐趋于稳定,分布均匀度分布在10%~35%,实际落种误差波动范围为0~25%,且该装置可实现对不同水稻品种的定量播种农艺要求。
田间试验结果表明:该装置在前进速度为2.0 m/s、作业高度为2 m 和螺旋转速为20 r/min 工况下,可实现定量播种野香优2 号,其播种量变异系数为18.70%,实际落种量误差为13.64%,进一步验证了该装置对不同水稻品种的适应性和工作性能;但旋翼风场和自然风速对播种质量的影响尚需深入讨论。
