基于RS和AHNs的轮毂电机故障模糊诊断法*
2022-11-04薛红涛童鹏江洪
薛红涛,童鹏,江洪
(1.江苏大学汽车与交通工程学院 镇江,212013)
(2.江苏大学机械工程学院 镇江,212013)
引言
面对日益严峻的能源和环境危机,节能减排的意义不言而喻。汽车能耗是造成大气污染和温室效应的主要原因,因此大力发展节能与新能源汽车,降低污染物排放,推动“纯电驱动”技术转型等专题已经被提升到国家战略高度。轮毂电机作为电动汽车“轮式驱动”系统的核心技术之一,相比于集中式驱动电动汽车,不仅集驱动、制动、承载等多种功能于一体,而且在能耗、传动效率等方面有较明显的优势,但也存在着安全性、可靠性以及耐用性等问题。轮毂电机由于特殊的安装位置,在复杂的运行工况下,极易诱发轮毂电机的机械故障,一旦1个或多个轮毂电机发生故障,就会产生相应的转矩脉动,导致效率下降,产生的偏航力矩将导致车辆行驶偏离,严重时可能导致交通事故危及驾驶员和乘客的生命。因此,如何实现对轮毂电机机械故障的有效监测,是轮毂电机广泛应用于电动汽车的关键技术之一。
现阶段,国内外多位学者在轮毂电机故障状态监测方面进行了一定的研究。Li等[1]利用蚁群优化算法构建逐次诊断模型,对轮毂电机的轴承故障类型进行了有效识别。Xue等[2]提出了一种基于振动信号提取最佳故障频率区域特征信号的智能诊断方法。Mehmet等[3]提出基于人工前馈反向传播神经网络和系统参数对小功率轮毂电机进行实时监控和故障诊断。潘汉明等[4]分别利用小波分解和连续小波变换,提取轮毂电机霍尔传感器输出的特征信号和相电流波形的特定频率分量,获得永磁体排列不均匀性和弱磁故障的信息,实现故障诊断。李仲兴等[5]提出一种基于动态贝叶斯网络的轮毂电机机械故障诊断法,实现对轮毂电机机械故障的在线诊断。这些方法对轮毂电机故障状态监测研究有一定的借鉴意义。
然而,车辆的多变运行工况和复杂运行环境很容易干扰轮毂电机的监测信号,尤其是振动信号。此外,受现有分类器的泛化性和鲁棒性的限制,很难达到车辆的运行安全要求。如何在多变运行工况下快速准确地识别故障类型,建立一套完整的轮毂电机机械故障诊断系统是迫在眉睫的问题。为了解决这些问题,笔者提出了一种基于RS理论和AHNs的模糊诊断方法,旨在诊断轮毂电机机械故障,解决监测数据特征冗余和不确定性问题,简化人工碳氢网络数据样本,提高诊断方法的泛化性和鲁棒性。
1 基于RS理论的特征参数离散化
在轮毂电机机械故障诊断中,振动信号是最有效的监测信号之一,但是振动信号往往数据量很大,包含复杂的信号特征。因此,需要经过信号处理、特征提取,提炼成特征参数,来表征轮毂电机的各种运行状态[6]。
RS理论能够直接对数据进行分析和推理,并发现其隐含知识,挖掘出隐含规律,是处理不完整和不确定知识的有效工具。目前,RS理论已经广泛应用于机器学习、决策分析及数据挖掘等领域[7]。
在实际环境中,由于电动汽车运行工况复杂多变,轮毂电机运行受到外部干扰非常严重,导致由传感器采集的振动信号计算出的特征参数是随机的,且区分度不高[8]。如果直接使用,诊断系统的响应速度慢、泛化性差。RS理论是一种数据离散化的有效工具,可以在不破坏算法分辨关系的前提下,对特征参数进行最粗略的划分,以达到加快机器学习算法的运行速度及提高分类精度的目的[9]。张一朦[10]将粗糙集方法和模糊神经网络融合,将粗糙集约简后的参数作为模型输入,获得了更优的诊断效果。林琳等[11]基于粗糙集理论对特征参数进行了属性约简分析,从而建立简单明了的决策表,搭建高压断路器的机械故障诊断模型,有效提高了故障诊断精度。因此,基于RS理论,笔者定义了一种特征参数的离散化方法,具体可表示为

其中:x为特征参数;a和b分别为特征参数域[a,b]内最小值和最大值;R为特征参数x的极差;K为区间[a,b]的划分数;z为远大于K的正整数;f(x)为离散化后的特征参数。
离散化后的特征参数定量地描述了某区间内的特征参数,淡化了这个区间内特征参数的差异性,同时也简化了样本集。
2 基于AHNs的模糊诊断法
在机器学习中,AHNs是一种新型的有监督学习算法,其基于碳氢化合物的化学结构和化学规律,构建了一种从输入到输出之间的非线性关系,具有很好的封装信息特性[12]。目前,AHNs已经被应用在信号处理、模式识别等多领域。
2.1 AHNs基本理论
AHNs由碳氢分子、化合物及混合物组成,其信息的基本单元是由1个碳原子和至多4个氢原子组成的CH分子,化学式可表示为CHk(k=1,2,3,4)。CH4是1个稳定分 子,CH1,CH2,CH3是不稳定分子。多个不稳定分子基于非极性共价键可形成形如式(2)所示的最常见的线性饱和化合物,两端为CH3分子,中间有N-2个CH2分子。像这样多个线性饱和化合物可以组成1个碳氢混合物,其网络称为AHNs[13]。1个 碳氢化合物是1个简单模型,1个 碳氢混合物是1个混合模型。本研究基于1个线性饱和化合物介绍AHNs的监督学习算法。

通常情况下,监督学习的样本类型数就是AHNs中1个化合物的分子数。令(x,y)(x∈[c,d],y∈Y)是原始数据经过粗糙集离散化和约简后的学习样本,其中:x为激发AHNs的输入参数;y为样本类型。若学习样本中有N个不同的种类,可以用正整数1,2,···,N依次表示不同的样本类型,即y∈{1,2,···,N}。通常情况下,输入参数是多维的,为了便于理解,笔者以1维的参数为例介绍AHNs的算法。根据组件的化学行为和相互作用,AHNs的数学模型可表示为

其中:N为AHNs中CH分子的数量;ψ(x)为AHNs的输出或响应;φi(x)为第i个CH分子行为的数学模型。
φi(x)的定义为

其中:wi为第i个碳原子值;hij为与第i个碳原子 相连的第j个氢原子值;k为相应氢原子的数目;Di为激发第i个CH分子的输入域D1∪D2∪···∪DN=[c,d],Di∩Dj=∅(i≠j)。
CH分子是封装信息的基本单位,影响其行为的因素较多。对于每个CH分子的行为,将能量与键能进行比较可以选择k的值。实际上,除了w,h,k等参数外,还必须确定x的输入域,x是激发每个CH分子的输入参数。目前,在AHNs监督学习算法中,首先,基于学习样本,确定输入域的上下界限,将整个输入域划分为N等份,如式(5)所示,依次作为CH分子行为的初始输入域,如式(6)所示;其次,基于最小二乘法确定氢原子h的值和碳分子w,计算每1个CH分子的能量,如式(7)所示;然后,计算相邻两分子间能量的误差函数,如式(8)所示;最后,基于误差函数更新每1个CH分子行为的输入域,如式(9)所示,直至任意相邻两分子间小于设定阈值ε或者达到最大迭代次数。


上述参数在迭代t-1=0时初始化,最大迭代次数为tmax。
记w,h的最优值为w*和h*,CH分子行为的最优输入域为D*,于是学习后的AHNs模型可表示为

其中:y′为由输入参数x激发的模型输出,表示状态类型的值。
很显然,y′值不一定恰是一个整数。文献[8]利用Round函数估计输出值,虽然可以快速识别状态类型,但是忽略了不同类型状态的模糊性,容易出现误判现象。因此,笔者提出了一种基于AHNs的模糊诊断法,对学习后AHNs的输出值y′进行统计,得出y′的概率密度函数。基于模糊理论将y′的概率密度函数转化成y′的隶属度函数,由隶属度函数推断相应的状态类型。
2.2 模糊诊断法
基于学习样本AHNs输出值y′的统计分析,不难发现每一类样本的AHNs输出值y′都服从正态分布,其概率密度函数可表示为

其中:μ和σ分别为某一类样本的AHNs输出值y′的数学期望和标准差。
基于模糊理论可得到其对应的隶属度函数p(y′),即

λi和λk计算公式分别为

其中:M为对应样本的AHNs输出值y′域的划分数。
图1是某一类样本的AHNs输出值y′的概率密度函数和隶属度函数。记p1(y′),p2(y′),…,pN(y′)分别为标示类型为1,2,…,N的样本AHNs输出值y′的隶属度函数,则任一待诊断状态,经特征参数离散化和AHNs模型,便可计算出该状态可 能 是 标示类型为1,2,…,N的概率分别为p1(y′),p2(y′′),…,pN(y′′),以及该状态可能是未知类型即不是所有标示类型的概率为pun(y′)=max{1-。这N+1的概率值中哪一个值最大,则该诊断状态是对应标示类型的概率最大,于是该模糊诊断模型可以表示为
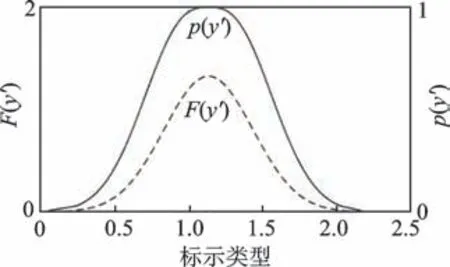
图1 概率密度函数F(y′)和隶属度函数p(y′)Fig.1 The probability density function F(y′)and membership function p(y′)

图2为已知2种样本类型的模糊诊断案例,其中p1(y′),p2(y′)分别是已知样本类型的隶属度函数,pun(y′)是除已知样本类型外的未知类型的隶属度函数。对于某一待诊断状态,AHNs输出值为y0,p1(y0),p2(y0)和pun(y0)分别为0.95,0.09和0,所以可以判断该状态为标示类型1对应的状态。

图2 模糊诊断案例Fig.2 Fuzzy diagnosis case
3 故障诊断方法验证
笔者设计了稳定状态下轮毂电机台架试验,并采集3种不同负载转矩下轮毂电机的振动信号,经数据预处理后输入到轮毂电机模糊诊断系统中,进而验证本研究所设计的模糊诊断系统的有效性。
3.1 轮毂电机台架试验
图3为稳定状态下轮毂电机试验台架系统,主要由轮毂电机、磁粉制动器、供电系统、控制系统和数据采集系统5部分构成。
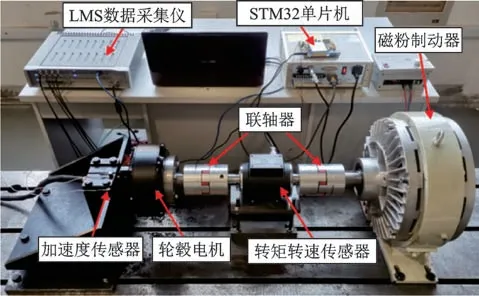
图3 轮毂电机试验台架系统Fig.3 In-wheel motor test bench system
转子轴承的局部磨损是轮毂电机典型的机械故障之一,试验根据轮毂电机通用安全要求,分别定制3种典型轴承磨损故障的轮毂电机,具体为外圈故障、内圈故障和滚动体故障,在相同的外界条件下依次更换进行试验。为模拟负载转矩,磁粉制动器被控制实现10 N·m和30 N·m负载转矩。试验中,直接利用实车的车载供电系统供电,并利用STM32单片机定量模拟踏板油门,控制轮毂电机稳定在100,300,500和700 r/min转速下,利用加速度传感器和LMS数据采集仪记录振动信号,采样频率为12.8 kHz,采样时间为60 s。
3.2 特征参数及其离散化
为了能够有效诊断轮毂电机运行状态,通常提炼振动信号的特征成为特征参数,来表征轮毂电机的运行状态。文献[14]提出了一种综合权重诊断指标法(synthetic weight detection index,简称SWDI)选取灵敏度较高的特征参数,来提高系统的诊断精度。基于此方法,笔者从多个振动信号的特征参数中选取了均方根值P1、频谱的歪度P2和波形的稳定性指数P3来表征轮毂电机运行状态。
为了提高诊断系统的泛化性和响应速度,将试验数据提炼成特征参数后进行离散化处理。基于式(1)将特征参数的区间划分数分别设置为2~180,进行不同程度的离散化处理,选取其中60%作为训练样本集,剩余40%作为测试样本集,以支持向量机(support vector machine,简称SVM)为工具分析特征参数的不同程度离散化处理对模型识别精度和训练时间的影响,结果如图4所示。

图4 不同离散化程度下识别精度和训练时间Fig.4 Recognition accuracy and training time at different discretization levels
随着区间划分数的增加,SVM模型识别精度先增后减,模型的训练时间也逐渐增加,当划分区间数在[15,40]范围内时,模型识别精度最佳,因此笔者选取30作为最佳的区间划分数,将特征参数P1,P2,P3分别做离散化处理,得到离散化后特征参数记为f1,f2,f3。
3.3 基于AHNs的模糊诊断系统
基于上述获得的离散化特征参数,联合转速建立向量(f1,f2,f3,v)作为输入,用整数1,2,3,4分别表示轮毂电机正常状态、滚动体故障、内圈故障和外圈故障的4种状态作为输出,搭建轮毂电机机械故障模糊诊断系统,如图5所示。

图5 轮毂电机机械故障模糊诊断系统Fig.5 Fuzzy diagnosis system for mechanical failure of in-wheel motor
选取任意转速和负载转矩下的60%试验数据作为训练样本集对AHNs模型进行学习,其中学习率η为0.1,容差值ε为0.05,最 大迭代 次 数为200。然后将训练样本集中参数输入到学习后的AHNs模型中得到输出状态值y′,并基于式(12)~(14)计算出轮毂电机4种状态的隶属度函数。图6显示了100 r/min转速下轮毂电机4种状态对应的隶属度函数曲线示例。

图6 100 r/min转速下轮毂电机各状态的隶属度函数Fig.6 Membership function of each state of in-wheel motor at 100 r/min
将剩余40%试验数据作为测试样本集,输入该模糊诊断模型,即可获得各状态的诊断概率。诊断结果显示100 r/min转速下该方法的整体识别精度达到86.81%。类似的对于300,500和700 r/min这3种转速下的试验数据进行同样的处理,可以得到轮毂电机各状态在不同转速下基于本研究方法的识别精度,如图7所示。测试样本集整体识别精度达到86.42%,仅有不到两成在80%以下,表明该方法可以有效实现复杂工况下轮毂电机状态识别。

图7 不同转速下轮毂电机各状态的识别精度Fig.7 Recognition accuracy of each state of in-wheel motor at different speeds
为了进一步验证所提方法的有效性,选择与传统AHNs,SVM[15]和BP神 经 网 络(back propagation neural networks,简 称BPNN)[16]这3种 分 类 器进行比较。使用相同的试验数据分别进行学习和测试,各分类器识别精度对比如图8所示。由图可知,笔者所提出方法的识别精度仅在个别具体故障状态下不是最优,且对于轮毂电机所有状态类型的识别精度均保持在0.8以上,较其他方法而言具有更好的泛化性和鲁棒性。

图8 各种分类器识别精度对比Fig.8 Comparison of recognition accuracy of various classifiers
4 结论
1)针对振动信号特征参数区分度不高,诊断系统的响应速度慢、泛化性差的问题,提出了一种基于RS理论的特征参数离散化方法,淡化了特征参数局部差异性,简化了样本集。
2)针对AHNs模型输出状态值的模糊性,提出了一种基于模糊理论的AHNs模糊诊断法,有效提高了复杂工况下轮毂电机机械故障诊断系统的泛化性和鲁棒性。
3)设计了轮毂电机台架试验,验证了所提方法,并与其他方法进行比较。结果表明,该方法提高了轮毂电机状态识别精度,能够有效实现轮毂电机机械故障在线监测。
