基于混沌粒子群优化的转子失衡参数辨识研究*
2022-11-04运侠伦庞哲凯章云姜歌东刘斌梅雪松
运侠伦,庞哲凯,章云,姜歌东,刘斌,梅雪松
(1.西安交通大学陕西省智能机器人重点实验室 西安,710049)
(2.西安交通大学机械制造与系统工程国家重点实验 西安,710049)
(3.西安交通大学机械工程学院 西安,710049)
(4.西安电子科技大学机电工程学院 西安,710126)
引言
对旋转机械而言,转子运行平稳性是衡量其工作性能优劣的重要标准。造成转子失稳的原因众多,根据故障产生的原因大致可分为2种:①静态故障,如由加工误差、装配误差等原因造成的转子质量分布不均、质心偏移,这种误差是转子系统的固有属性,只能通过提高加工精度、改善装配工艺及静态补偿等方法进行修正;②动态故障,这种故障是在长期运行下各部件寿命下降引发的系统故障,如转子的污损或由轴承故障导致的转子失稳等。针对动态故障,通常采用定期修正或实时补偿的方法降低影响。由上述原因引起的转子故障中,失衡为主要故障之一,占比约为80%[1]。在实际应用场合,如大型汽轮机机组、发电机机组等,通常采用多面平衡技术完成转子失衡校正。
转子的高精度平衡的前提是准确的失衡参数辨识。为此,国内外学者进行了大量的研究,主要得出的方法可根据研究对象的不同分为基于试验的平衡方法和基于模型的平衡方法。基于试验的平衡方法为影响系数法和一系列改进影响系数法。王星星等[2]将遗传交叉因子与粒子群算法相结合提出一种改进粒子群算法的最小二乘影响系数法。Yao等[3]则使用双目标优化方法解决了最小二乘影响系数法在特定转速下产生过多残余振动的缺点,并通过仿真和实验验证了该方法的有效性。Zhang等[4]提出一种适用于圆盘型工件的自适应影响系数法,降低了工件在动平衡测量和计算时产生的误差,但由于该方法仅验证了单面影响系数法,因此并不适用于多面转子轴系。基于模型的平衡方法则省去了频繁的试重启停机过程,简化了辨识步骤,该方法的核心思想是建立转子系统模型,得出系统的振动响应方程,从而在已知系统振动响应的条件下反向求解出失衡质量及相位。孙景钰[5]以高速转子-滑动轴承系统为研究对象,建立了其有限元模型,并验证了该模型的准确性,同时研究了失衡求解时的方程病态性,给出了几种常见的病态性解决方法。Zhang等[6]通过不断修正转子系统的刚度,使得由其各向异性带来的误差得以补偿。Yun等[7]提出了利用动力学模型辨识转子传递特性的矢量匹配平衡方法,说明了加重影响系数法的本质,同时采用矢量匹配法有效地抑制了转子振动。Zou等[8]提出了一种应用卡尔曼滤波器的时域辨识动平衡方法,可以得到不同情况下的失衡参数,但该方法也并未对超过两个平面的转子进行实验。Nordmann等[9]则采用数值分析方法替代了需要重复试重的影响系数法,并通过发电机组的平衡案例论述了方法的有效性。文献[10]在Jaya算法基础上将两平面刚性转子轴系的支承反力作为优化目标函数,采用离散平衡优化方法求解失衡参数。近些年,随着智能算法的不断成熟,邱海等[11]提出了一种基于人工神经网络的转子动平衡方法,利用神经网络拟合失衡响应与失衡量之间的关系。Gohari等[12]也提出一种由人工神经网络模型近似表达转子模型的代理模型方法,但由于训练网络所需的大量样本数据很难获取,因此该方法的可行性并不高。顾煜炯等[13]提出了一种基于代理模型的辨识算法,用粒子群算法优化的支持向量回归构建了用于代理真实转子的模型。
影响系数法虽然简单易行,但存在的最重要缺陷是当平衡面数量多于测点数量,得到的方程组呈病态,无法得到正确的影响系数[14]。为了消除病态影响,通常会在多转速下多次试重,因此会增加操作时的启停机次数。而基于模型的平衡方法虽然省去了试重环节,但在模型反问题求解时仍存在病态问题。为此,笔者提出了使用粒子群优化算法替代失衡响应反问题求解过程,通过利用粒子群优化算法易实现、高精度及收敛快的优点,在基于模型的平衡方法基础上,提高了失衡参数的求解精度。同时,为了避免陷入局部最优,又引入了混沌优化思想[15],在多维粒子群求解过程中将粒子的各维度独立地进行混沌映射处理,使得粒子群活性最大化,增强了全局寻优能力。
1 转子轴系模型及失衡响应
根据转子动力学所述,典型的转子-轴承系统一般是由离散的叶轮(具有集中质量的圆盘)、具有分布质量的弹性轴段和轴承部件等构成[16]。在进行系统有限元建模时,可以将转子系统沿轴线划分为圆盘、轴段和轴承座等单元,各单元在节点处联结。对于N个节点,N-1个轴段单元连接而成的转子系统,不考虑轴承座等效质量,则系统的运动方程为

其中:M为系统的质量矩阵;Ω为常数;J为系统的回转矩阵;K为系统的刚度矩阵对阵部分;Q1,Q2为系统的广义外力矩阵;U1,U2为系统的位移向量。
U1和U2具体表示为

其中:xi为转子第i个节点在x方向的位移;θyi为第i个节点绕x轴旋转的角度;yi为第i个节点在y方向的位移;θxi为第i节点绕y轴旋转的角度;i=1,2,…,N。
由于各单元之间的相互作用力在方程综合的过程中已经相互消去,并且轴承座对轴承的支撑反力也已经等效到刚度矩阵K中。因此,在广义力向量Q1和Q2中只剩下失衡激励的广义力。如果不计系统阻尼,且假设轴承支撑特性为各向同性,令Z=U1+iU2,则整个转子-轴承系统的运动微分方程为

根据式(3)可求得转子-轴承系统的失衡响应为

其中:A=Ω2[-MΩ2+JΩ2+K]-1Q。
若考虑系统阻尼,则失衡响应为

2 粒子群优化算法及改进粒子群算法
粒子群优化算法(particle swarm optimization,简称PSO)是一种集群智能算法。其特点是在寻优过程中算法本身具有“记忆性”,每一次迭代算法会存储群体中每个粒子的搜寻结果,并寻找最接近全局最优解的粒子,其他粒子将向该粒子靠近,经过一定搜寻次数,所有粒子将集中于全局最优解。因此,该算法被广泛应用于全局寻优问题。但因为PSO易陷入局部最优且收敛速度慢,Shi等[17]在原先的算法基础上引入惯性权重,提出了带惯性权重因子的粒子群算法,即标准粒子群优化算法(SPSO)。
2.1 标准粒子群算法
粒子群算法实现需要满足3个前提条件,分别是优化变量的选择、优化区间的选择和优化目标的设定。在转子失衡参数求解过程中,系统的失衡量可表示为复数形式P=xcosθ+ixsinθ或指数形式P=xeiθ。为了方便划分优化范围,笔者选择后者。在粒子群不断寻找最优解过程中,搜寻范围对优化速度和精度都有重要的影响,因此在计算时可预先进行粗略的估算或根据实际经验进行范围的初步界定,尽可能的缩小搜寻范围。对转子动平衡问题一般使用残余振动量来评价系统的平衡好坏,因此以本研究所用转子模型为对象,采用单一目标优化的方法,构造优化目标为

其中:x1,x2,x3和x4为待辨识参数中失衡振幅;θ1,θ2,θ3和θ4为待辨识参数中失衡相位在确定优化目标之后,构建粒子群算法中非常关键的适应度函数。
适应度函数的具体构造步骤如下:
1)根据实验对象,计算出转子-轴承系统的质量矩阵M、惯量矩阵J、刚度矩阵K和阻尼矩阵C;
2)根据系统动力学方程计算出系统失衡响应Z;
3)记录实际测量的系统失衡响应;
4)根据式(6)计算得到适应度值fit。
依据上述步骤即可得到粒子的适应度值,该值作为个体适应度值,对粒子下次搜寻方向给予部分指导。根据以上所述构建出标准粒子群算法,具体过程描述如下:
2)计算每个粒子的适应度值fit,记为初始个体最佳适应度值fitperson_best,取所有粒子适应度值最小值记为群体最佳适应度值fitglobal_best;
5)重新计算个体最佳适应度值和群体最小适应度值;
6)重复步骤3~5,直至达到既定迭代次数或达到预期适应度值,得到最优粒子,即得到系统的失衡参数。
上述算法为SPSO,但该算法由于惯性权重因子、学习因子为固定值,因此粒子群在达到一定的迭代次数之后易陷入局部最优。因此,笔者加入了异步自适应权重因子构造了ASPSO,具体做法为将惯性权重因子修正为自适应权重因子,即随着适应度的降低而降低,如式(7)所示
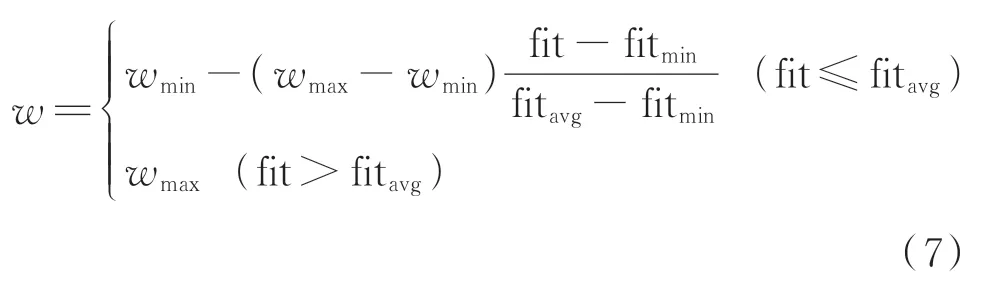
其中:fit为当前适应度值;fitmin为最小适应度值;fitavg为平均适应度值。
将学习因子修正为异步线性学习因子,即随着迭代次数增加,个体学习因子减小,群体学习因子增加,如式(8)所示

2.2 混沌粒子群算法
混沌具有随机性、遍历性及初值敏感性的特点,因此在ASPSO的基础上又引入混沌优化的思想,将各维度的惯性权重因子进行混沌处理。笔者选择混沌变量分布更加均匀的Tent映射[18],如式(9)所示其中:q=0.6。

式(9)得到的Z为混沌矩阵,将每个元素映射至惯性权重衰减半径r内,r为线性递增,即寻优后期半径变大,经过混沌化后,w更加分散,从而种群活力增强,有利于跳出局部最优。混沌衰减权重因子如式(10)所示

根据上述思想得到的是CWPSO,该算法在ASPSO算法的基础上,对粒子的各维度进行独立地混沌映射处理,使粒子最大化保存了活性,避免各个维度之间的相互干扰,影响辨识精度。实验过程中发现,CWPSO虽然比SPOS和ASPSO精度有所提升,但在经历了一定迭代之后,种群活性降低。为了进一步激发种群活性,在CWPSO基础上又利用混沌优化思想以当前粒子群的历史最优位置为基础产生混沌序列,并用混沌序列中的最优粒子随机替换掉粒子群中的一个粒子,设计出DCPSO,即在种群迭代80%后将搜索范围改变为混沌搜索范围。具体算法流程如图1所示。

图1 DCPSO算法流程图Fig.1 DCPSO flowchart
3 仿真分析及实验
笔者基于本特利RK4实验台搭建单跨度四平衡面双测点的转子实验,转子全长为560 mm,以每8 mm轴段划分为1个单元,共划分为70个单元,如图2所示。

图2 四面双测点转子模型示意图(单位:mm)Fig.2 Diagram of rotor model with four sides and two measuring points(unit:mm)
图中:B1,B2分别为位于节点8和65处的滚动轴承支承;P1,P2,P3和P4分别为位于节点18,30,42和56处的加重平衡面;S1,S2分别为位于节点24和48处的测振传感器,用来测量系统的失衡响应。采用Matlab数学分析工具按1.1节所述建立该转子系统运动方程。该系统的实验参数如表1所示。

表1 转子模型实验参数Tab.1 Rotor model experimental parameters
3.1 仿真实验
本次仿真实验对比了SPOS,ASPSO,CWPSO和DCPSO这4种算法,每组算法加入相同的失衡变量后进行10组实验,每次实验迭代次数为500次,粒子数目为400个。在DCPSO中混沌迭代次数为100时,各算法适应度值如表2所示。
由表2可以看出,虽然SPSO可以达到的适应度最小值为3.26×10-11,但同时也可以看出该算法十分不稳定,相反,CWPSO平均适应度值为4种算法中最小且适应度值稳定。
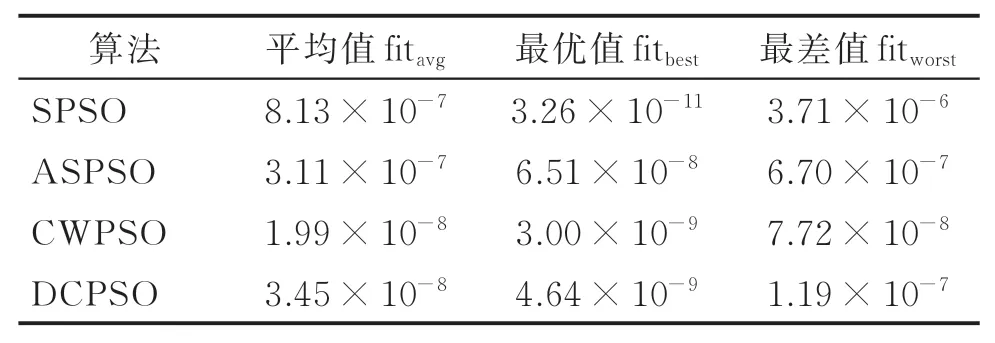
表2 4种算法适应度值Tab.2 Fitness values of four algorithms
为进一步说明,将4种算法每次仿真得到的粒子精度误差(8个参数仿真计算值偏离理想值程度)进行对比。4种算法实验误差与分布如图3~6所示。从图3~6可以看出,SPSO实验组误差波动范围大于20%,算法稳定性差,其中第6组实验的第3个变量的误差最大达21.39%;ASPSO误差较SPSO有所减少,其中第8组实验的第5个变量误差最大为14.55%;CWPSO实验组中第6组实验的第3个变量误差最大为10.70%;DCPSO算法整体稳定性高,平均误差集中在3%附近,其中第4组实验的第7个变量误差较大为11.12%。根据上述分析可以得出,DCPSO的算法精度和稳定性均高于其他3种算法。
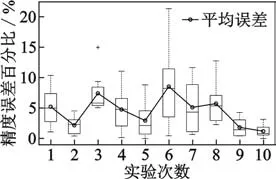
图3 SPSO实验组误差分布Fig.3 Error distribution of SPSO experimental group
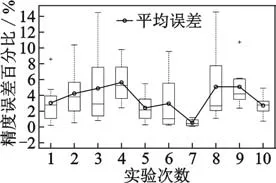
图4 ASPSO实验组误差分布Fig.4 Error distribution of ASPSO experimental group
图7为4种算法进行10组仿真得到的平均误差对比。由图可以看出,DCPSO精度和稳定性最高,其平均误差百分比中位数最小为2.66%,平均值为2.86%。因此,可以得出结论:针对转子系统失衡响应求解问题,应用DCPSO相比SPSO,ASPSO和CWPSO更加稳定,精度更高。

图5 CWPSO实验组误差分布Fig.5 Error distribution of CWPSO experimental group

图6 DCPSO实验组误差分布Fig.6 Error distribution of DCPSO experimental group
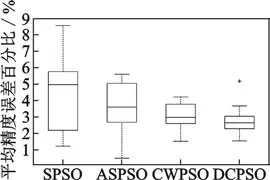
图7 4种算法平均误差对比Fig.7 Comparison of average errors of four algorithms
3.2 实验搭建及结果
为验证算法的有效性,搭建了本特利RK4多圆盘转子实验台,如图8所示。该实验台由本特利RK4实验台、电机调速仪、信号前处理器、信号采集仪及上位机采集软件等部分组成,并配备有多种规格的配重螺钉,用于添加失衡量。在节点24和节点48处设置相互正交的2组德国米依高精度位移传感器,用于测量转子在该方向的跳动。同时,本特利RK4实验台有用于测量实际转速的凹槽,因此采集仪一共输出5路信号到上位机软件中进行信号分析,提取转子在测点处的振动幅值和相位。

图8 多圆盘转子实验台Fig.8 Multi disk rotor test bed
根据3.1的分析结果采用DCPSO进行失衡参数辨识,在转速为2 040 r/min时进行验证,传感器S1,S2处失衡信号经过信号处理得到的幅频域曲线如图9和图10所示。从图中可以看到,平衡前S1处振动值为83.12μm,S2处振动值为64.65μm;平衡后S1处振动值为4.93μm,振动抑制率达94.07%,S2处振动值为2.89μm,振动抑制率达95.93%。因此,应用DCPSO的失衡辨识在该情况下效果良好。实验结果如表3所示。

图9 平衡前后S1处振动频域曲线Fig.9 Frequency domain curve of vibration at S1 before and after balancing
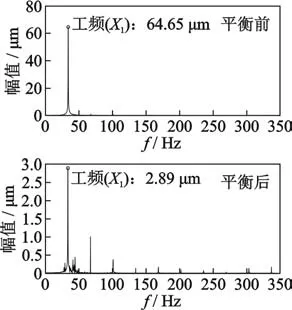
图10 平衡前后S2处振动频域曲线Fig.10 Frequency domain curve of vibration at S2 before and after balancing

表3 转速为2 040 r/min时的实验结果Tab.3 Experimental results at 2 040 r/min
4 结论
1)基于多圆盘转子系统的动力学模型,得到了失衡响应的特征方程,并引入粒子群优化求解思想替换掉原有失衡参数辨识反向求解过程,有效地解决了多面转子失衡参数辨识存在的病态性问题,避免了其他修正方法引起的多次启停机,简化了辨识过程。
2)将混沌优化思想和粒子群算法相结合,采用均匀分布的Tent映射作为映射函数,将被视作粒子的多维度变量在各维度上混沌化。随着迭代次数增加整体趋势呈缩减态势,增加了粒子群的搜索能力,并将该思想进一步应用到失衡参数辨识算法中得到双混沌粒子群算法,增加了失衡参数辨识精度。
3)经过仿真分析和实验验证,得到在10组实验中,DCPSO的平均辨识误差为2.86%,中位辨识误差为2.66%,将DCPSO应用于本特利RK4试验台作实验验证,在转速为2 040 r/min时,转子系统抑振率达到了94%以上,因此可以得出结论,DCPSO是一种适用于多面转子轴系失衡参数辨识的优良算法。
