基于区域参考框架的GNSS滑坡监测
2022-11-04王国权
王国权,鲍 艳
1. 休斯顿大学地球与大气科学系, 休斯顿 77024; 2. 北京工业大学城市与工程安全减灾教育部重点实验室, 北京 100124
近20年来,基于全球导航卫星系统(GNSS)的高精度定位技术已被广泛应用到地质灾害(滑坡、地面沉降、活断层、火山及地震等)的观测和监测研究中,GNSS观测技术已发展成为滑坡灾害监测的新兴技术手段之一。GNSS包括美国的GPS、俄罗斯的GLONASS、欧盟的Galileo、中国的北斗(BeiDou)及其他区域的卫星导航系统。目前GNSS在滑坡灾害监测领域的应用主要局限于对小规模滑坡的短期(几天至几个月)监测,在滑坡长期连续观测(几年至数十年)领域还未得到广泛的应用,其中一个主要原因是缺乏稳定的区域参考框架。区别于短期的GNSS位移(形变)观测,长期的位移观测需要一个在时间和空间上连续的、稳定的基准,即稳定参考框架。建立参考框架需要积累长期的(5年或更长)、连续的、大面积的地壳形变观测数据,并非一朝一夕之功[1-3]。
高精度的GNSS定位并不保证得到可靠的滑坡稳定性评判结果。在滑坡灾害长期观测和监测预警实践中,决策者最关心的通常是观测点的位置随时间变化的速度,即场地速度。场地速度的精度和可靠度在很大程度上取决于所选用的参考框架。由GNSS解算得到的观测点的位置坐标通常与定义卫星轨道位置的全球参考框架对齐。在全球参考框架下,观测点的场地速度由该点所在地壳块体(板块)的长期运动所主导,短期的、每年毫米级的场地速度通常会被每年厘米级的板块运动掩盖或夸大。GNSS连续观测台网(CORS)通常被认为是实现高精度区域大地变形监测的基础硬件。区域稳定参考框架可视为实现高精度GNSS变形观测的核心固件,也称“软”硬件,源于硬件,置于软件之中,在一个比较长的时间窗口(5年或更长)内保持稳定。硬件(CORS)、固件(参考框架)和GNSS数据处理软件三者共同构建高精度区域大地变形观测和滑坡灾害监测预警的基础设施。本文旨在介绍区域参考框架在滑坡灾害监测领域的应用。
1 中国区域稳定参考框架系列
近年来,我国的GNSS基础设施建设快速发展,中国地壳运动观测网(CMONOC)目前运行约260台连续GNSS观测站[4](图1),绝大多数COMONOC台站已有十年的连续观测数据(2011—2020年)。在过去的十年中,我国各级测绘、电力、交通、地震等相关部门和高校科研院所已经安装了数以千计的连续GNSS观测站[5-7]。这些长期运行的连续GNSS观测台站,为在我国建立一系列区域参考框架积累了宝贵的基础数据[8-11]。
基于地质构造活动和早期的GNSS观测数据,文献[12]将我国大陆及邻区划分为6个一级活动地块区:青藏、西域、南华、滇缅、华北及东北亚,并进一步划分为22个二级活动地块。活动地块是被晚新生代活动构造带所分割和围限的地质单元。活动地块的区划主要基于地壳块体的整体运动特征。稳定参考框架基于区域地壳块体的刚性假设,即假设地块内部各点之间的距离不随时间而改变。绝对刚体实际上是不存在的,只是一种理想模型。受到地块内部断层活动、火山活动、地面沉降等影响,地块内部往往经历复杂的地表形变,很难视为一个整体刚性块体,但基于长期的、大量的GNSS连续观测结果,在活动地块内部通常能够找到一组相对静止、覆盖整个地块的GNSS台站(台网)(例如,各站点之间的相对运动速度小于1 mm/a)。由这些相对独立的观测点可构建一个“刚性骨架”模型,基于该刚性骨架,可建立一个稳定的参照系,即“区域稳定参考框架”,简称“区域参考框架”。建立区域参考框架的核心工作就是从大量的GNSS台站中找到一组相对稳定的台站,即参考站。理论上,用3个参考站就能够建立一个区域参考框架,但在实践中,则尽可能多地选择参考站,并且所选参考站尽可能均匀覆盖整个研究地块区。参考站的选取原则和建立区域参考框架的方法详见文献[13]。
结合文献[12]的活动地块划分成果和长期的GNSS观测结果,笔者将我国大陆和海域初步划分为7个“刚性骨架地块”,简称“刚性地块”(图1),拟建立覆盖我国陆海全域的区域参考框架系列:东北参考框架、华北参考框架、华南参考框架、西北参考框架、青藏参考框架、川滇参考框架及南海参考框架。近年来先后建立了华北参考框架[14-15]、华南参考框架[16]和东北参考框架[17]。建立这3个区域参考框架所选用的参考站如图1所示,刚性地块边界的厘定在上述文献中有详细的介绍。建立其他4个区域参考框架的工作正在准备中。一般来讲,活动地块边缘往往受到地块相对运动的挤压和剪切影响,其刚性比地块内部差。因此,在地块之间预留了相当宽的“地块过渡带”。例如,在东北地块和华北地块之间预留了宽约100 km的过渡带,即河套断陷带和张家口-渤海断裂带[15,17]。华北稳定参考框架已经被应用到北京昆仑大厦公寓的倾斜监测与预警[18]、石家庄地铁一号线下穿滹沱河引起的河底变形监测[19],以及天津地面沉降长期观测[20]等工程实践中。
每个GNSS系统在定义卫星轨道时都选用自己的全球参考系统,GNSS接收机记录到的原始数据(卫星与地面站之间的距离、卫星轨道等)都与各GNSS系统的参考框架对齐。但是后期处理软件在解算位置坐标时,通常选用由国际GNSS组织(IGS)发布的、与最新IGS参考框架(当前为IGS14)对齐的卫星轨道产品。区域参考框架通常由IGS全球参考框架的转换来实现,并随全球参考框架的更新而更新。IGS有望在2022年前后更新当前的全球参考框架(从IGS14更新到IGS20),我国区域参考框架系列也将做相应的更新,实现从IGS20到区域参考框架的坐标转换。
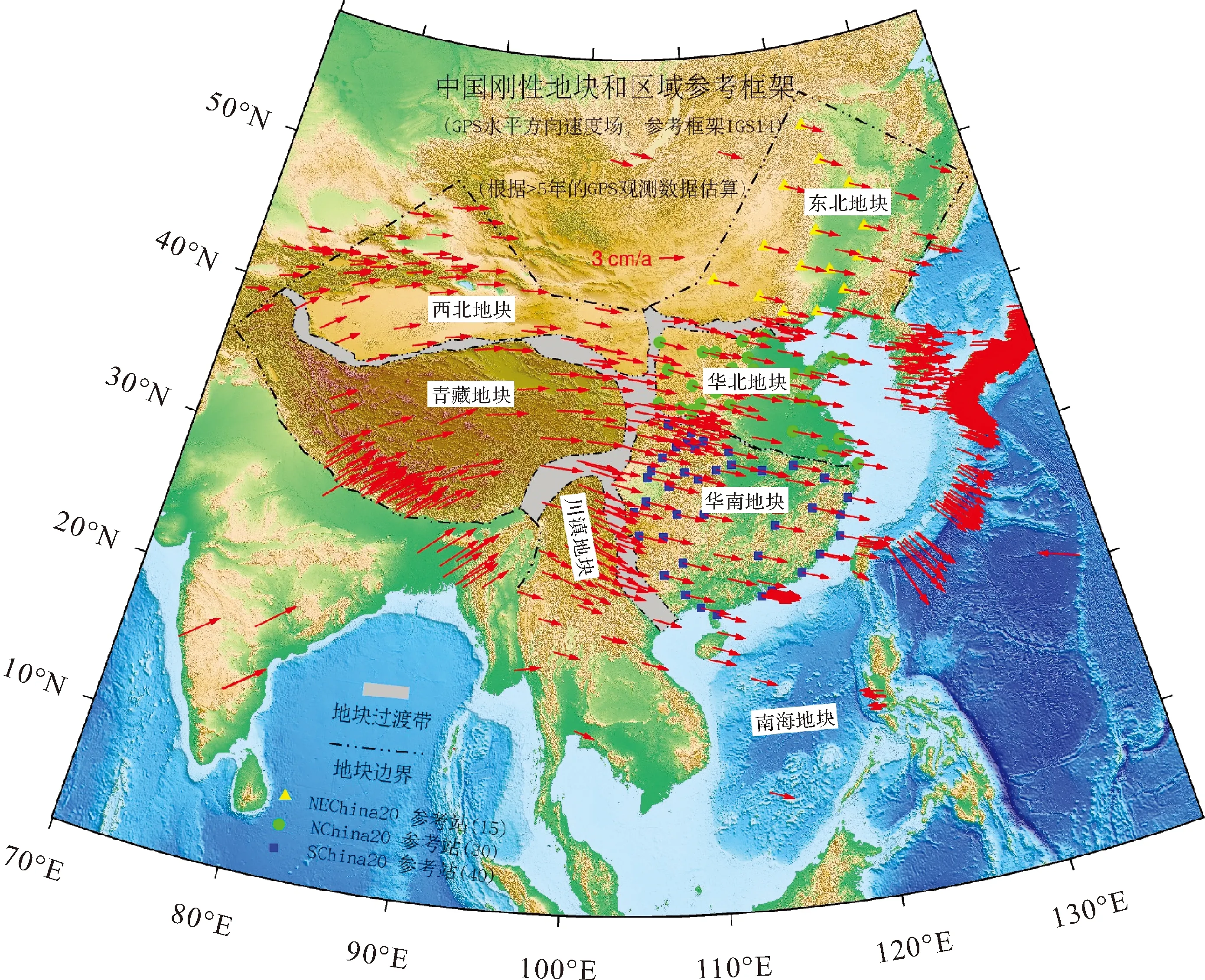
图1 中国及周边地区地壳运动速度场(水平方向,2000—2020年)和“刚性地块”区划Fig.1 The site velocity field of crustal movements (horizontal, 2000—2020) in China and its surrounding areas and the zonation of “rigid frame blocks”
2 从全球参考框架到区域参考框架的坐标转换
坐标系是参考框架的具体实现,因此,参考框架的转换也称坐标转换。建立区域参考框架,就是建立在全球参考框架下的XYZ坐标位置与在区域参考框架下的XYZ坐标位置之间的联系,即确定转换参数。本节扼要介绍从全球参考框架到区域参考框架的坐标转换方法。
实现区域参考框架的常用方法是经典的Helmert方法,即将IGS14参考框架下的地心地固(ECEF)三维笛卡儿坐标(XYZ)通过平移(Tx,Ty,Tz)、旋转(Rx,Ry,Rz)和缩放(s)转换到区域参考框架。基于3个或更多基准站在两个参考框架下的XYZ坐标,可以通过最小二乘法计算在该历元的7个坐标转换参数。转换长期观测得到的XYZ时间序列,则需要计算每天的7个转换参数。解算每天的7个转换参数需要收集和处理大量的参考站数据,并且需要评价每个参考站的稳定性,解算过程也比较繁杂,因此单日7参数坐标转换方法目前主要应用在研究领域,在滑坡和工程结构变形监测实践中应用很少。Helmert转换方法在本质上是线性转换,线性的位置时间序列经Helmert坐标转换后仍然保持线性,并且每个转换参数的时间序列也保持线性。在单日7参数转换方法的基础上,笔者提出了用7个转换参数实现位置时间序列(XYZ,t)从全球参考框架到区域参考框架的转换方法[13,15]
(1)
从本质上讲,区域参考框架的稳定性(精度)由参考站所覆盖地壳块体的刚度来决定。在实践中,通常使用参考站在区域参考框架下的场地速度的均方根(RMS)来评估该区域参考框架的稳定性,也称参考框架的精度。华北和东北稳定参考框架在水平方向的精度约为0.5 mm/a,在垂直方向约为0.6 mm/a[15,17];华南稳定参考框架的稳定性则更好,在水平方向约为0.4 mm/a,在垂直方向约为0.5 mm/a[16]。在解释低于1 mm/a的观测点位移速度时,应当同时考虑速度估计值的可靠性(例如,95%置信区间)和参考框架的稳定性。一般而言,地块的整体刚度随地块面积的增大和时间跨度的延长而降低,因此区域参考框架在时间上有其寿命,在空间上有其最佳适用范围。笔者建议NChina20、NEChina20和SChina20的适用范围在空间上限于各自对应的刚性地块区(图1),在时间上限于从2000—2025年约25 a的时间窗口。各区域参考框架在空间上的应用范围可扩展到其周边的地块过渡带,但在解释GNSS记录到的观测点位移速度时应当考虑到地块过渡带内的场地速度。受地块相对运动的影响,在地块过渡带内,稳定场地相对于区域参考框架的位移速度有可能大于1 mm/a[15-17]。
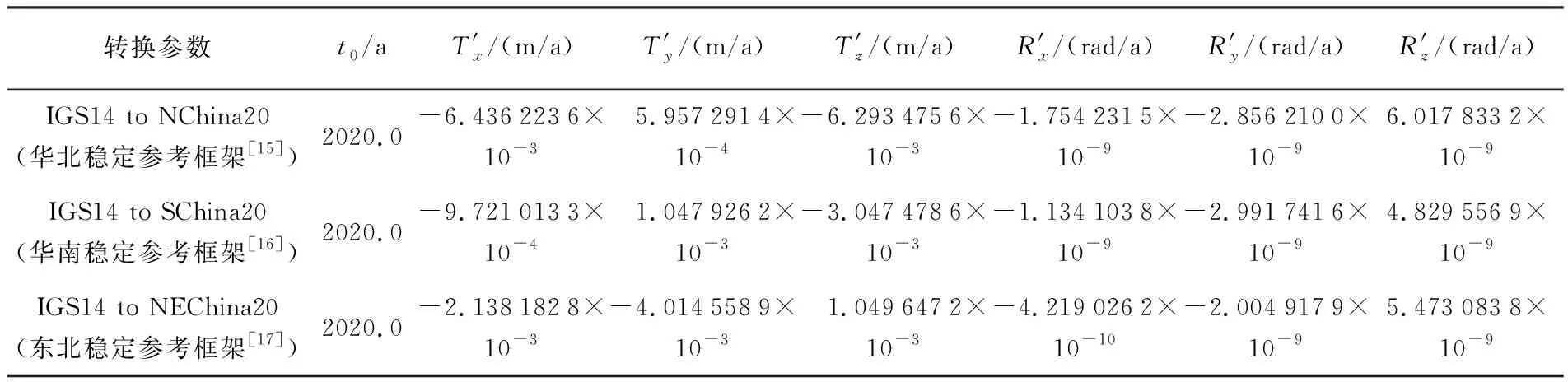
表1 实现华北、华南和东北稳定参考框架的转换参数
3 滑坡位移监测
根据定位模式,从GNSS观测数据中解算观测点位置的方法可概括为相对定位和绝对定位方法。相对定位方法使用基准站和监测站的同步观测数据,通过载波相位二次差分计算参考站和监测站之间的相对位置。相对定位方法在滑坡监测领域已得到广泛的应用,但由于参考站的位移误差将直接传递到观测点,采用相对定位方法监测滑坡需要同步评价参考站的稳定性[21-22]。绝对定位方法在不使用地面参考站的情况下,根据单台GNSS接收机所记录的观测信号和高精度卫星轨道、钟差及各种误差修正模型来解算GNSS天线相位中心的准确位置。精密单点定位(precise point positioning,PPP)就是一种典型的绝对定位方法,不需要地面参考站,避免了参考站的不稳定性对观测结果的干扰,同时也显著降低了野外观测的成本,在地质灾害长期观测、监测和预警实践中有广泛的应用前景[23-24]。对于大型蠕动滑坡(每年几个毫米)的长期监测,笔者推荐用绝对定位方法处理GNSS数据,首先得到观测点在全球参考框架下的坐标位置,再转换到区域参考框架下研究其稳定性。对面积较小的单体滑坡监测,可考虑在滑坡外围布置参考站,用相对定位的方法解算滑坡相对于参考站的3方向位移,同时用绝对定位的方法监测参考站在区域参考框架下的稳定性。
3.1 隐伏滑坡的长期监测
滑坡隐患精准识别一直是滑坡研究领域关注的热点和难点。隐伏滑坡指滑动速度非常缓慢,一般在每年几个毫米的水平,在常规的地质灾害调查中未被发现或确认的缓慢滑坡。由于在工程选址时很难识别这类滑坡,很有可能在其上修建大型建筑物,甚至安置整个城市。例如,因葛洲坝工程和三峡工程建设,位于湖北省的巴东县城在20世纪80年代从现在的淹没区往上搬迁到一个隐伏滑坡上,即后续研究证实的黄土坡滑坡[25],当时的地质勘查和城市选址并未发现该处为一处隐伏滑坡。受到人类活动的影响,该滑坡的活动性增加,滑坡风险随着人口数量和社会经济水平的提升而加剧,巴东县城在2010年代不得不再次搬迁。笔者曾于2016—2018年期间在巴东县城黄土坡一带开展GNSS滑坡监测研究,由于当时没有一个稳定的、统一的参照系统,很难整合区域内众多研究机构多年来在不同时期发表的基于不同观测平台、不同参照系统的滑坡观测结果,很难对该滑坡的滑动历史和空间分布开展长期的、综合的深入研究。
隐伏滑坡调查和识别对城市规划和大型工程建设有重要意义。在实践中,很难在几年的时间窗口内,在全球参考框架下识别每年几个毫米的缓慢滑坡,区域稳定参考框架则为识别和长期追踪隐伏滑坡提供了精确、连续的参照系。图2(a)为华南地区两个连续CORS站近8 a的3方向(NEU)位移时程,参考框架为全球参考框架IGS14。每个点代表由PPP方法解算得到的GNSS天线相位中心在24 h的平均位移,简称“单日解”。CORS台网通过建设永久性连续运行的GNSS台站,为大地测量、工程建设、城市规划、国土测绘、地籍管理、防灾减灾等多种现代化、信息化管理提供高精度的位置和时间信息,是区域空间数据基础设施的重要组成部分。CORS台站的选址,一般都遵循缜密的野外调查,严格排除滑坡等不稳定场地。在该CORS台网运行约5 a后,台网运营方逐渐认识到CORS站REF1和其邻近的REF2站的位移时间序列有一定的差别,但在全球参考框架下很难确切判定这两个台站所在场地的稳定性。REF1和REF2之间的直线距离约135 km。图2(b)为REF1和REF2在华南稳定参考框架(SChina20)下的3方向位移时程,二者的差别很明显。REF2记录到的位移时间序列保持很好的线性(2011—2018年),3方向场地速度小于1 mm/a,是一理想的CORS站;REF1则向东南方向运动,在2015年前后场地速度有明显变化。REF1在2011—2014年的时间窗口内向南运动的平均速度为(6.5±0.5)mm/a(±0.5为95%可信度),向东运动的平均速度为(2.9±0.5)mm/a,向下运动的速度为(5.5±0.8)mm/a;自2015年以来,向南运动的速度减小到(2.2±0.5)mm/a,在东西方向相对于SChina20保持稳定,沉降速度减小到(3.0±0.9)mm/a。估算GNSS场地速度及其可信度的方法参考文献[26]。REF1位于山坡上,靠近山脊,在野外的现场调查中,未发现可疑的断层和滑坡活动特征,在该地区的地质和工程勘察文献中也未找到在REF1场地附近有断层和滑坡的记录,笔者初步推测REF1位于一个隐伏滑坡上。没有长期的GNSS观测,很难在野外识别每年几个毫米的滑坡位移。美国的板块边界观测台网(Plate Boundary Observational GNSS Network,PBO)也发生过将一个永久参考站(AC55)安装到一个隐伏滑坡上的事故,该台站在运行4 a之后不得不拆除[27]。
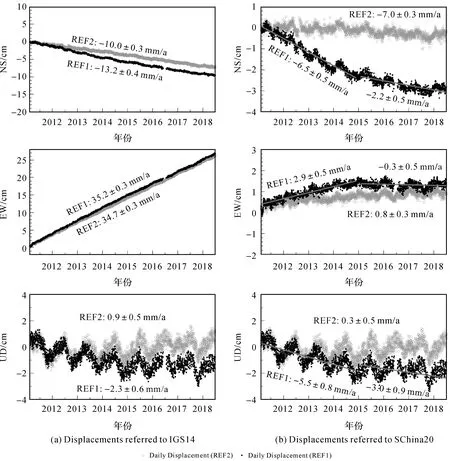
图2 滑坡位移时间序列在全球参考框架(IGS14)和区域参考框架(SChina20)下的比较和隐伏滑坡的识别Fig.2 Comparisons of the landslide displacement time series with respect to the global reference frame (IGS14) and the regional reference frame (SChina20), and the detection of a hidden landslide
3.2 滑坡初动自动识别
近年来,随着物联网、大数据实时流传输、云计算技术的快速发展,GNSS实时定位技术已经被成功应用到滑坡灾害实时监测预警实践中[28-31]。由GNSS观测数据实时解算得到的3方向位移时间序列,简称位移流,已成为滑坡灾害监测预警系统的主要信息流之一。评价GNSS位移流有3个主要指标:时间延迟、稳健性和精度。时间延迟指监测系统从GNSS实时数据中解算得到位移解的时间和位移发生的时间之间的间隔。时间延迟制约着滑坡预警的时效性。对于蠕动滑坡的长期监测,可以用静态定位的方法解算24 h的平均位移,根据监测需要,时间延迟可控制到1 d;对于滑动较快的滑坡,例如每天几个毫米的位移,可根据需要解算每小时的平均位移,时间延迟可控制到1 h;对于已经进入临滑或加速阶段的滑坡,可以用动态定位的方法解算每秒的位移,时间延迟可控制在几秒到数分钟。稳健性主要指位移流的连续性和离群值的比例。位移时间序列中的离群值通常由设备临时故障、野外观测环境的突变(雷电、强降雨、临时多路径反射等)、数据传输不畅及软件设计缺陷等因素产生。在实时监测中,一般很难将常规的离群值和实际的地面滑动(位移突变)及时区分。识别位移突变是GNSS实时监测中的一项关键技术。精度指滑坡位移解在滑坡静止或匀速滑动时的可重复性,一般用位移时程的均方根误差(RMSE)来评价位移的精度。GNSS观测数据经后处理得到的单日解的位移精度在水平方向一般优于5 mm,在垂直方向优于10 mm,1 h平均位移的精度在水平方向也能达到毫米级[23,32]。实时解算得到的位移时间序列的精度和稳健度一般低于后处理解算得到的位移时间序列的精度和稳健度,但随着GNSS软件和各种模型的完善、卫星轨道和钟差精度的提高、数据传输速度和容量的提升,GNSS实时处理和后处理结果之间的差别在逐步缩小。本节用中国地壳运动观测台网山西长治站(SXCZ)记录到的位移时间序列(单日解)来模拟实时位移流,例举稳定参考框架在滑坡监测预警中的应用。在GNSS实时监测中使用区域参考框架的最大优点是不需要安装参考站,因此也不需顾及参考站的稳定性和运行状态。
图3(a)为SXCZ台记录到的3方向位移时间序列,参考框架为NChina20。单日解由PPP方法解算得到。SXCZ记录了由2011年日本大地震(Mw 9.1)产生的同震位移,在东西(EW)方向约为5 mm (向东),在南北(NS)和垂直(UD)方向没有GNSS可识别的同震位移。SXCZ在2013年7月记录了一次快速滑动事件,经证实为由强降雨触发的小面积滑坡[13]。根据观测点水平方向的运动轨迹(图3(b)),该滑动主要发生在7月13日—7月24日约12 d的时间窗口内,向西北方向滑动约2 cm,平均滑动速度约为1.5 mm/d;在垂直方向没有观测到GNSS可识别的位移。SXCZ所在场地在这次快速滑动之前保持每年约1.5 mm向北的蠕动(1.5 mm/a),为一处隐伏滑坡,在当初的台站选址调查中没有被发现。
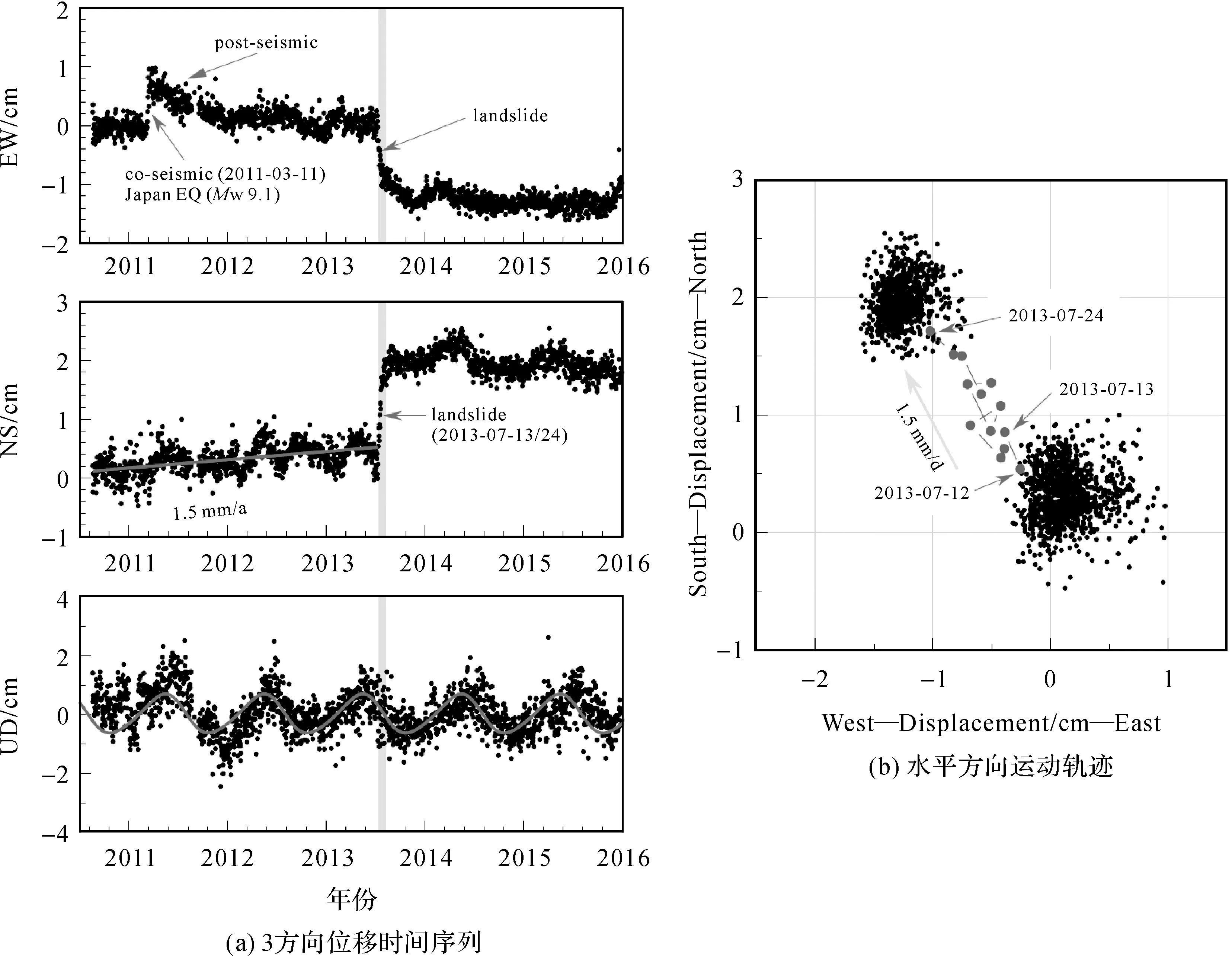
图3 山西长治GNSS台站(SXCZ)记录的滑坡位移(PPP单日解)(参考框架为华北参考框架)Fig.3 Landslide movements recorded by GNSS station (SXCZ) located in Changzhi, Shanxi province, with respect to the North China Reference Frame (NChina20)
滑坡从稳定状态转变为失稳状态的时间间隔往往差别较大,从几个小时到数月,甚至数年。滑坡初动的识别是评价滑坡监测预警系统的主要技术指标之一。GNSS实时位移流的精度一般在毫米到厘米级,滑坡的初始速度通常在每天几毫米的水平。在实践中,很难即时识别滑坡初动或加速。GNSS位移流中客观存在的离群值使得从位移流中及时判定滑坡初动尤为困难。笔者曾多年在美国波多黎各开展GNSS滑坡监测研究,用变化点检测(change point detection,CPD)技术实时分析GNSS位移流,在实践中很好地实现了滑坡初动的自动识别。文献[33]对各种CPD方法提供了一个很好的总结。简单来讲,CPD算法有两种类型,一种是离线的,另一种是在线的。离线算法使用所有数据点来查找变化点。在线算法不需要等待“将来”的数据,仅根据“当前”和“近期”的数据,分析数据的发展趋势和异常值特征,即时判断当前输入点的异常等级。在滑坡监测实践中,笔者将文献[34]介绍的从非平稳时间序列中检测异常值和变化点的方法集成到滑坡监测预警系统中。该方法由两部分组成:数据建模和评分。在数据建模部分,从数据序列中逐步学习数据变化趋势和离群值的分布特征;在评分部分,根据学习到的模型对每个数据或每个时间点进行异常度评分,即估计该值与学习模型的偏差,得分高表示成为统计异常值(突变点)的可能性高。
基于在SXCZ站的GNSS观测数据,可以构建(虚拟)山西长治滑坡监测预警系统。该系统同步运行GNSS实时处理模块和CPD检查模块。GNSS处理模块在每天的凌晨自动解算前一天的平均位置(IGS14,XYZ),并将该位置转换到区域参考框架(NChina20,XYZ)和站心直角坐标系(NChina20,ENU)。对位移流的每个新输入点(当前点),CPD检查模块基于历史观测值的机器学习来预测其运动趋势和可能出现的离群值,并计算当前点的异常分数。因此,在监测系统的终端,位移流和异常流是同步的。图4(a)为SXCZ站EW和NS方向的位移流和异常流。根据长期的异常流数据,系统将位移突变的阈值设定为15。当输入点的异常分数超过该阈值时,系统可启动高频的位移解算,例如开始每小时或每秒解算一次位移,结合现场、降雨、地下水等其他监测数据,监测人员可考虑启动其他预警措施。异常分数首次超过阈值的时间,可初步判定为滑坡初动的时间。如图4(b)所示,该系统能够相当准确地识别2011年日本大地震(Mw 9.1)的初动时间(3月11日)和2013年滑坡的初动时间。该自动识别系统判定的山西长治滑坡的开始时间为7月13日。该实时识别结果与用观测点水平方向位移轨迹图(图3(b))所判定的滑坡初动时间相吻合。位移轨迹图基于滑动之前和之后的位移判定滑坡开始的时间,仅依靠GNSS实时位移流很难在7月13日判定滑坡初动。CPD自动识别模块有效增强了GNSS监测系统尽早识别滑坡初动的能力,为灾害预警争取了时间。
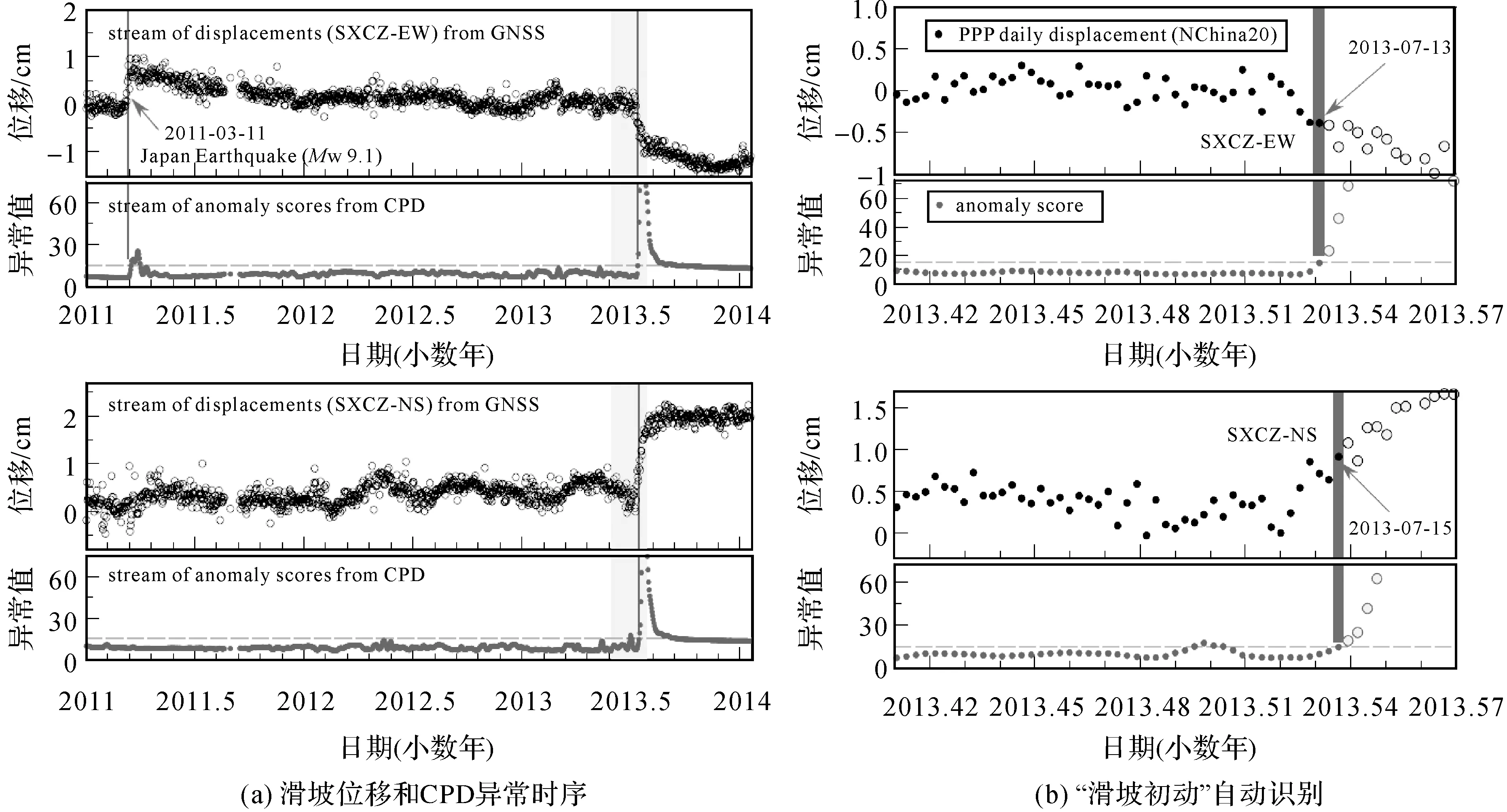
图4 基于区域稳定参考框架(NChina20)和变化点检测技术的滑坡实时监测Fig.4 Real-time landslide monitoring based on the regional reference frame (NChina20) and change point detection
4 总结与展望
随着GNSS观测系统的完善和数据处理技术的成熟,高精度GNSS技术将在滑坡灾害监测预警领域得到更为广泛的应用。综合应用GNSS精密单点定位技术(PPP)和区域稳定参考框架,工程技术人员经过简单的培训,可以开展高精度的、大面积的、长期的滑坡监测,无须安装地面参考站,也不需要进行繁杂的数据处理,从而大大降低了高精度GNSS滑坡监测的技术门槛和监测成本。近10年来,干涉合成孔径雷达(InSAR)、激光探测与测距(LiDAR)、各类基于无人机(UAV)的测量技术在滑坡监测领域得到了广泛的应用,这些遥感技术一般都装备GNSS,观测结果往往与全球参考框架对齐。区域参考框架为整合不同时期、不同地区、不同平台的遥感观测结果提供了一个统一的参照系统,为开展跨地区的、综合的、长期的滑坡灾害观测和监测构建了基础设施。笔者期望基于区域参考框架的滑坡监测方法将推动GNSS和遥感技术在我国滑坡灾害监测领域的应用,提升滑坡灾害预警能力和水平。
