联合InSAR与无人机航测的白鹤滩库区蓄水前地灾隐患广域识别
2022-11-04戴可人吴明堂冯文凯董秀军卓冠晨易小宇
戴可人,沈 月,吴明堂,冯文凯,董秀军,卓冠晨,易小宇
1. 成都理工大学地质灾害防治与地质环境保护国家重点实验室,成都 610059; 2. 成都理工大学地球科学学院,成都 610059;3. 浙江华东建设工程有限公司,杭州 310014
白鹤滩水电站是我国实施“西电东送”的国家重大工程,是当今全球在建规模最大、技术难度最高的水电工程。该水电站于2021年4月完成初期建设并开始蓄水,在2021年7月首批机组投产发电,目前已进入第一批机组发电试用阶段。全部机组于2022年7月全部投产发电,电站全部建成投产后,将成为仅次于三峡工程的世界第二大水电站,预计最终水位线达825 m。该水电站位于我国西南地区四川省宁南县、云南省巧家县交汇处,是金沙江下游干流河段梯级开发的第二个梯级电站。该区域地处青藏高原东缘横断山脉区域,多条断裂带在其中交错,造成区域内构造活动活跃,这也使该区域地质灾害频发[1]。大型水电工程往往由于水库蓄水等因素,极大地改变了库区的环境地质条件,加剧了岸坡地质灾害的规模和频率,直接威胁着水电站建成后的正常运行,同时也给两岸居民、水库本身带来了极大的安全风险和经济损失隐患。对蓄水前库岸进行大范围地质灾害隐患识别,摸清库区重大地质灾害隐患点及其分布规律,对蓄水后地质灾害治理及水电站蓄水发电后的正常安全运行维护等具有重要意义。
白鹤滩库区相对高差大、地形陡峭,属于典型的高山峡谷地貌,地质灾害隐患点往往具有分布范围广、交通不便、滑源区人难以至等特点[2]。传统的地质调查手段在大范围、地势陡峭的高位滑坡隐患识别中有很大局限性,很难高效、广域、快速、精准地查明潜在的地质灾害隐患[3]。近年来,基于航空航天数据的合成孔径雷达干涉测量技术(interferometry synthetic aperture radar,InSAR)技术与无人机航测技术已逐渐被用于地质灾害隐患识别。InSAR技术具有覆盖范围广、不受云雾限制、重访周期短等特点[4-5],逐渐在四川山区[3-10]、甘肃[11-14]等区域被应用于大范围的地灾隐患识别。在白鹤滩大坝所在金沙江流域及四川西南山区,文献[15]基于短基线差分干涉测量技术对金沙江有堵江风险的重点区域利用ALOS-PALSAR-1和Sentinel-1雷达卫星数据,探测出7处具有较显著形变的滑坡隐患。文献[16]采用堆叠InSAR(Stacking-InSAR)技术以金沙江结合带巴塘段为试验区﹐利用升降轨Sentinel-1卫星数据分析得到该区域4处典型滑坡的水平、垂直位移量。文献[17]利用时序InSAR技术对四川西南山区雅砻江流域两岸开展了大范围滑坡隐患早期识别,共探测出8处滑坡隐患点并对InSAR技术升降轨监测特性进行了分析。
无人机航测技术具有测量精度高、灵活性强、效率高、影像空间分辨率高等特点。基于航摄影像可以生成与构建正射影像图、三维地理模型等一系列数字产品[18-22],在地质灾害识别领域具有独特优势与价值。文献[23]利用高精度无人机航拍数据,对雅鲁藏布江缝合带加查-朗县段的崩塌、滑坡地质灾害进行识别,共计识别41处崩塌与92处滑坡。文献[24]利用航片生成的数字正射影像图(digital orthophoto map,DOM)数据、三维模型等数字产品在大岗山水电站库区识别了大量地质灾害点(滑坡、变形体、泥石流等),并与已有资料验证相吻合。文献[25]利用无人机航测技术对云南省蒋家沟流域进行航测飞行,得到高精度DEM数据,建立了适合高原山区的精细化地形建模的方法与技术体系。从InSAR与无人机技术结合应用角度来看,大量研究与成功案例均关注于针对已发生单体滑坡利用两种技术开展综合信息获取,分析滑坡破坏机制与降雨等触发因素[25-27],尚缺少在大范围滑坡隐患识别中的结合应用。另一方面,基于以上研究成果可以看出,InSAR技术与无人机航测技术在地质隐患识别中具有明显的先天优势,同时也各自存在一定局限性。如InSAR的形变测量隐患识别方法无法基于SAR图像进行地形地貌分析与验证判识,而无人机航测能够较好地解译微地形地貌,但是受制于飞行成本,无法实现广域全覆盖。两种技术相结合的库区地灾隐患识别方法体系具有很大优势和较高应用潜力,两者在广域滑坡隐患识别上综合应用还较少,值得进一步研究。
本文以白鹤滩库区葫芦口-象鼻岭地段为研究区域,采用时序InSAR方法开展了广域的滑坡灾害识别,并利用无人机航测技术对所识别出的隐患点进行野外调查与验证,识别滑坡迹象与微地形地貌。基于两项技术结果对隐患点进行综合分析与统计建库,并结合隐患点的形变量级、形变面积、是否涉水、威胁对象等因素给出了防治建议。本文同时总结了基于InSAR与无人机航测的库区地灾隐患综合遥感识别方法,为未来水库库岸区域地灾识别与监测提供了参考方法。
1 研究区域与数据
白鹤滩水电站位于金沙江下游四川省宁南县和云南省巧家县境内,是金沙江下游干流河段梯级开发的第二个梯级电站,以发电为主,兼有防洪、拦沙、改善下游航运条件和发展库区通航等功能[28](图1(b))。该区域位于青藏高原东南缘,高程在1000~3000 m之间,属川西南、滇东北高山与高原地貌单元与横断山系,主要由河流侵蚀地貌、构造地貌和冰蚀地貌组成,河谷深切,风化剥蚀严重[2]。本文以白鹤滩水电站所在金沙江主河道葫芦口-象鼻岭段两岸约800 km2范围为研究区域。该研究区沿线居住区密集,有多条交通要道且人类工程活动剧烈、稳定性差、坡体高差大、植被稀疏,加之河流掏蚀等影响极易诱发滑坡、崩塌、泥石流等地质灾害(图1(c)—图1(d)),是白鹤滩库区地质灾害防治的重点库段。
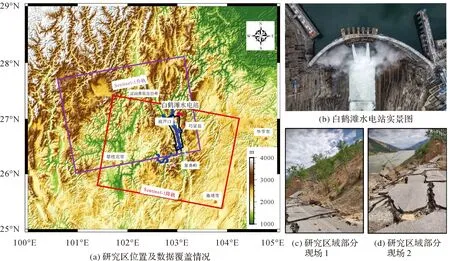
图1 研究区域概况及现场情况Fig.1 Study area overview and on-site photos
本文利用Sentinel-1 SAR数据进行InSAR时间序列分析。该卫星数据采用C波段成像,重返周期短、覆盖范围大,在地质灾害监测方面被广泛应用[29]。本文获取了研究区蓄水前共142景Sentinel-1升降轨单视复数(single look complex,SLC)影像(表1),其中86景升轨影像与56景降轨影像时间跨度分别为2014年10月—2020年8月、2017年2月—2020年8月。升降轨影像均采用干涉宽条带(interferometric wide swath,IW)模式下的VV极化方式获取,升轨影像入射角为44.14°,降轨影像入射角为39.62°。

表1 SAR数据主要参数
为了开展地质灾害点验证与分析工作,本文采用飞马V100(FEIMA-V100)型号无人机(图2(a))进行航测飞行,该无人机是由飞马公司推出的基于高性能垂直起降固定翼平台的一站式行业解决方案,以“高精度成图”“专业遥感”“视频侦查”为主要特点。该型号配备高精度差分GNSS板卡,支持PPK、RTK及其融合作业模式,可实现稀少外业控制点或一定条件(地物特征丰富)下无控制点的1∶500成图,支持POS辅助空三,实现免像控应用。根据InSAR识别的形变区分布情况,考虑到无人机单次续航飞行时长有限与其他环境因素影响,将研究区域划分为7个测区进行仿地飞行进行数据获取(图2)。
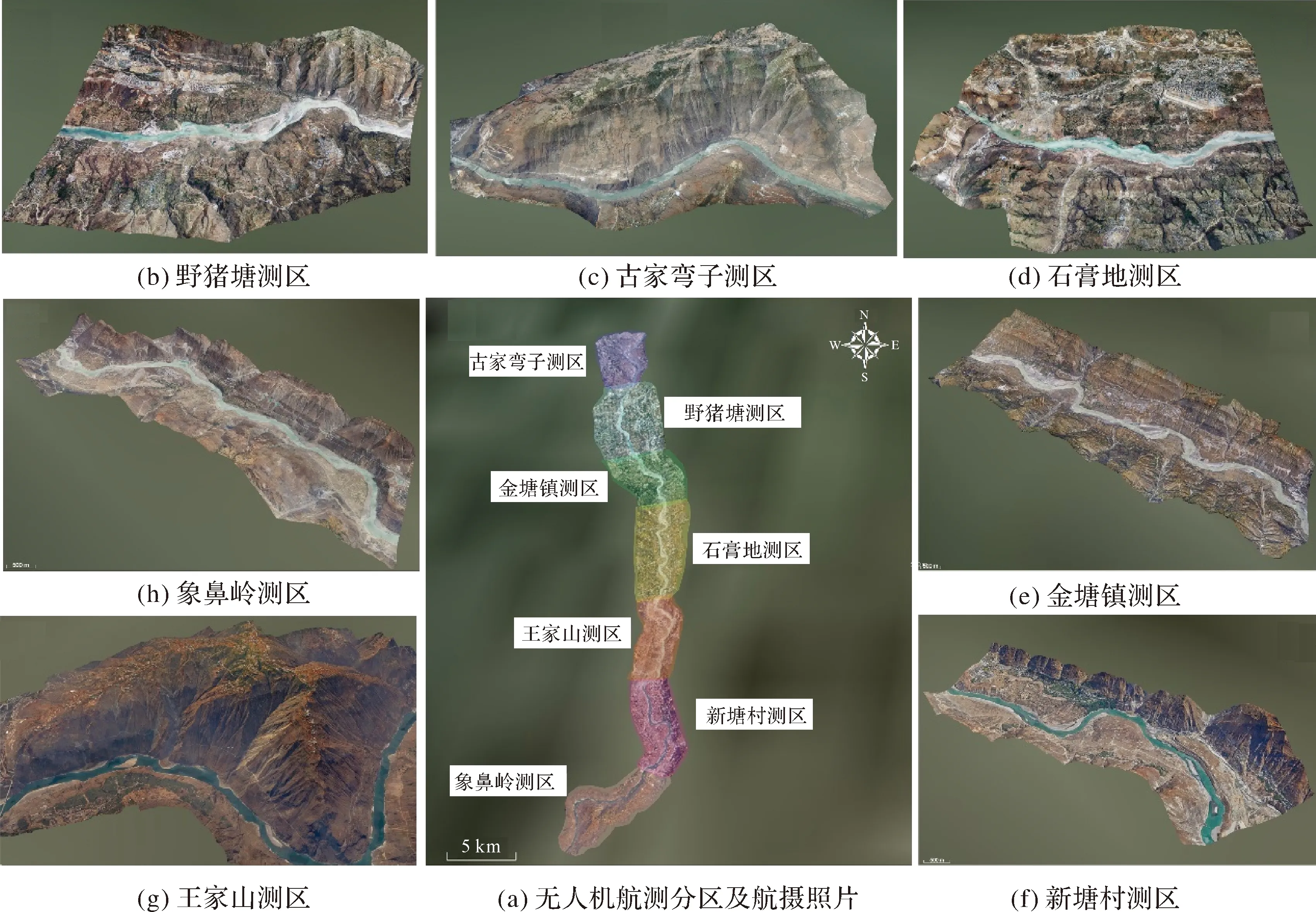
图2 无人机测区划分Fig.2 UAV survey area division
2 InSAR与无人机航测联合识别方法
本文联合星载InSAR技术与机载无人机技术,应用于白鹤滩库区葫芦口-象鼻岭段,以识别潜在的地质灾害隐患。首先基于InSAR技术对研究区全域进行大范围识别,其次针对识别出的包含强形变区的重点区域利用无人机航测技术采集航摄数据,以提取地形地貌等特征,结合野外验证进行综合研判,最终完成对识别出的潜在隐患点的建库,并根据隐患点的形变量级、形变面积、是否涉水、威胁对象等因素给出相应的防治建议,具体工作技术路线如图3所示。
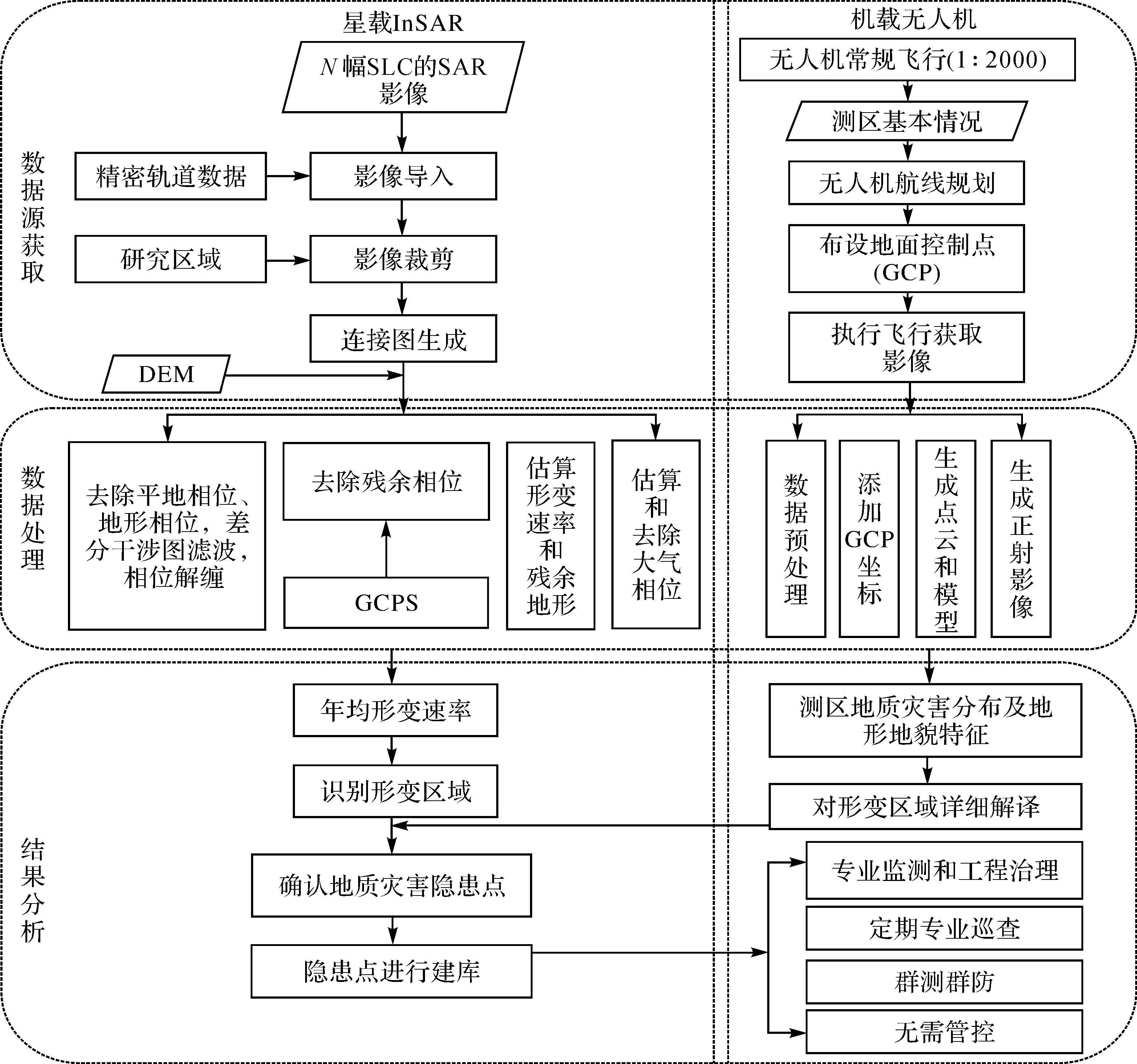
图3 技术路线Fig.3 Technology flowchart
时间序列InSAR技术可以在一定程度上弥补传统的差分干涉测量技术(differential InSAR,DInSAR)存在的失相干问题,适用于大范围广域地质灾害隐患识别[17]。本文使用的时间序列InSAR技术的具体算法为小基线集方法,该算法利用N副SLC格式的SAR影像,基于一定时空基线阈值构成干涉对网络。通过差分干涉、去平、滤波、相位解缠等处理,通过控制点(geodetic control point,GCP)来估算和去除残余的恒定相位和解缠后还存在的相位坡道,求解单点相位时序方程,获得线性形变速率和高程残余误差[30-31]。对于残余相位,通过奇异值分解法(singular value decomposition,SVD)分解和滤波技术分离非线性形变和大气延迟相位,获取完整的年均形变信息[30-31]。该方法不仅解决了长空间基线造成的时间不连续问题,还增加了监测的时间采样率,又结合稳定的干涉相位,提高了监测的空间分辨率[30]。利用该方法最终获取潜在地质灾害隐患区域(图3星载InSAR部分)。
无人机航摄技术根据航测影像选取同名像点构造三维影像进而获取地形地貌特征。首先,了解测区基本情况,进行无人机航线规划,将测区分成了7个分区分别进行航测飞行(图2)。对每个分区布设相应的地面控制点(GCP),通过对测区的初步调研,计算相应的高程、设计摄影基线及航线间隔来进行飞行,进而获取研究区域的航摄影像[24]。其次,对所摄航片进行内业数据处理,通过数据预处理即对获取的姿态测量单元数据、影像数据等进行预处理,生成后期处理所需格式的文件,为数据后续处理做好准备工作。再次,利用预处理数据进行空中三角测量,即利用连续摄取的具有一定重叠的航摄影像,以摄影测量方法建立同实地相应的航线模型或区域网模型,从而确定区域内所有影像的外方位元素。然后,通过识别同名点建立重叠影像之间的空间坐标关系来进行影像匹配。接着,利用影像融合来消除影像色彩等差异。最后,基于生成的点云数据生成DOM、DEM等数字产品[22]获得研究区域微地形地貌特征(图3机载无人机部分)。
将InSAR解译得到的形变区作为重点区域生成高精度的DOM数据并建立三维立体模型进行精细判识,通过航片所观察到的微地形地貌特征对形变区进行详细解译,判断形变区是否为地灾隐患点。最后,根据两种技术所得到的结果给出相应的结论与防治建议,完成对相应的灾害点建库工作。两种技术相结合可以高效快速地完成从广域到单体精准地确定研究区域潜在灾害点,做到发现、验证与综合研判的一体化。
3 InSAR与无人机航测联合识别结果与讨论
3.1 InSAR隐患识别总体结果
本文利用上述时间序列InSAR技术与Sentinel-1卫星SAR影像对白鹤滩库区葫芦口-象鼻岭段开展了蓄水前活动坡体探测及地质灾害隐患识别工作。依据InSAR形变速率结果,两岸共识别出38处存在显著形变的潜在地质灾害隐患点,并对形变区按照从北到南的顺序依次进行排序编号,即XB01—XB38(图4—图5)。由图5可以看出,该研究区植被覆盖并不是特别茂密,加之所使用数据覆盖长(2014—2020年),有利于InSAR时序高精度解算。InSAR所确定滑坡相干性好、形变清晰。另一方面升降轨同时监测也起到了互相弥补与验证的作用,监测结果具备较高可靠性。

图4 InSAR识别地质灾害隐患点分布情况及典型坡体Google Earth影像Fig.4 Distribution of geological hazard revealed by InSAR and Google Earth images of some typical slopes

图5 疑似地质灾害隐患点识别结果细节Fig.5 Details of identification results of active slopes
从总体分布上来看,潜在隐患点分布在金沙江右岸的有25处,左岸的有13处(图4(a)),其中3处形变较大的隐患点展示对应的Google Earth影像如图4(b)—图4(d)所示。从蓄水完成后(825 m水位线)涉水情况区分,有10处涉水隐患点,占比26.31%;28处非涉水隐患,占比73.68%。隐患点高程在657~2521 m之间,其雷达视线向年平均形变速率在23~120 mm/a之间(图5),14个隐患点形变量级较大(超过90 mm/a),最大形变面积达3.4×106m2,且多为高位隐患点。
3.2 王家山滑坡隐患点联合分析
XB28为王家山滑坡隐患点,该点位于云南省曲靖市会泽县娜姑镇王家山北侧,金沙江右岸斜坡,地理坐标为103°3′E,26°31′N,距坝址约92.40 km,呈西北朝向。王家山滑坡隐患点所在的坡体海拔在733~1134 m之间,高差约401 m。坡体的年平均形变速率如图6(a)所示,通过InSAR监测结果可以看出,坡体相干性很好,强形变区位于坡体中上部,通过选取特征点P1、P2、P3可以看出,最大视线向形变速率达110 mm/a(图6(b)),坡体在时间上基本呈线性匀速变形,显著形变面积较大,约1.36×105m2。
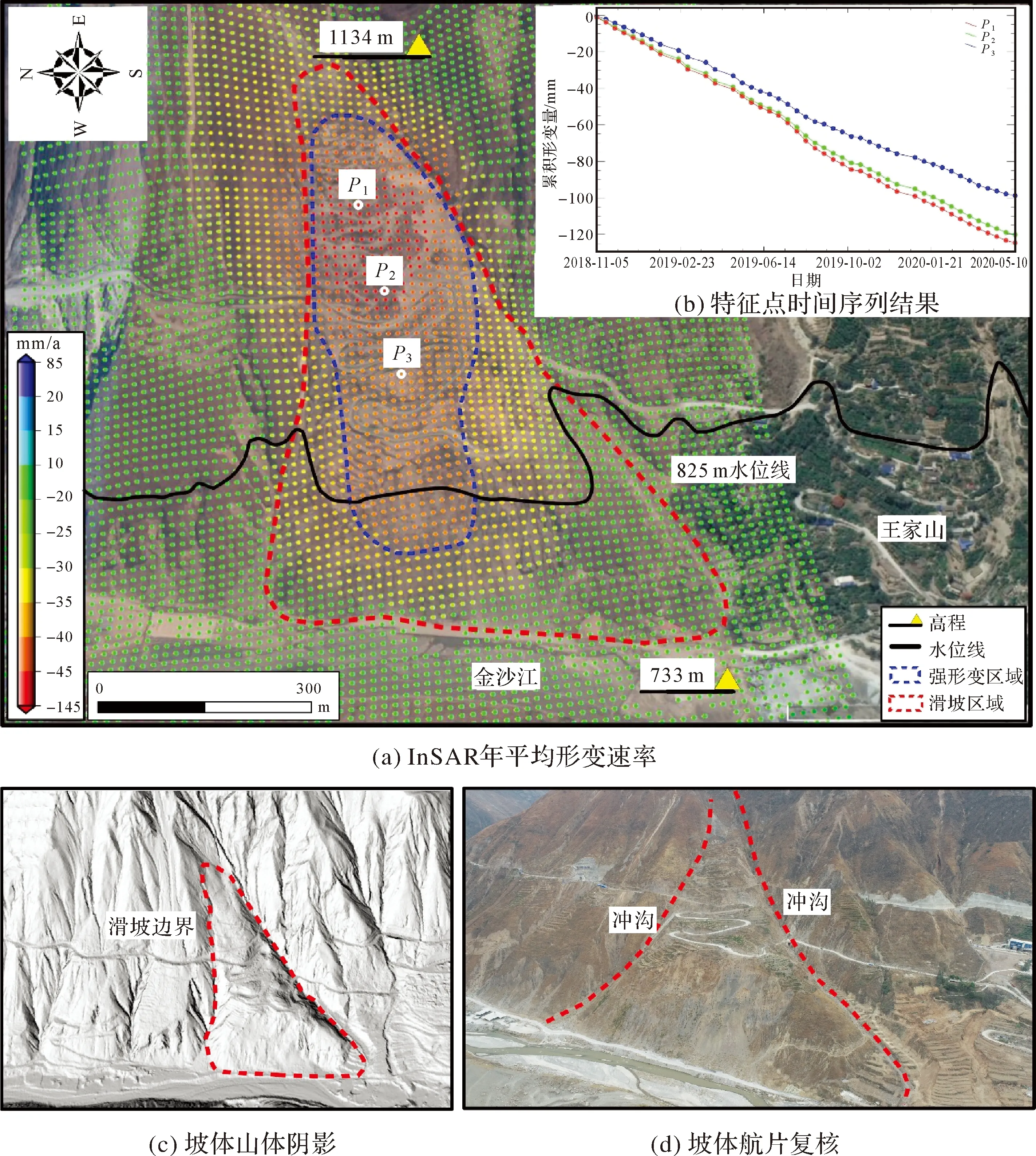
图6 王家山滑坡形变Fig.6 Investigation on Wangjiashan slope
对基于无人机航测飞行得到的航片生成山体阴影图进行三维建模解译(图6(c))可观察到,王家山滑坡整体呈堆积体状,平面上呈近似三角形(图6(c)),坡体中上部有下滑挤压的趋势,与InSAR识别到在坡体中上部的强形变区域相吻合。对航片进行详细解译可发现,滑坡体内地形陡缓相间,发育平顶小山包及滑坡凹地(图7(a))。坡体前缘有明显的崩塌现象,后缘下挫明显,为覆盖层大型厚层滑坡。滑坡两侧发育冲沟,沟内季节性流水,在滑坡后缘处交汇,具有典型的“双沟同源”和“圈椅状”地貌特征(图6(d))。滑坡右侧边界处挡墙倾倒及路面下沉(图7(c)),公路内侧挡墙护坡滑塌、鼓胀变形(图7(b)),也可见小规模滑塌、坍塌现象。
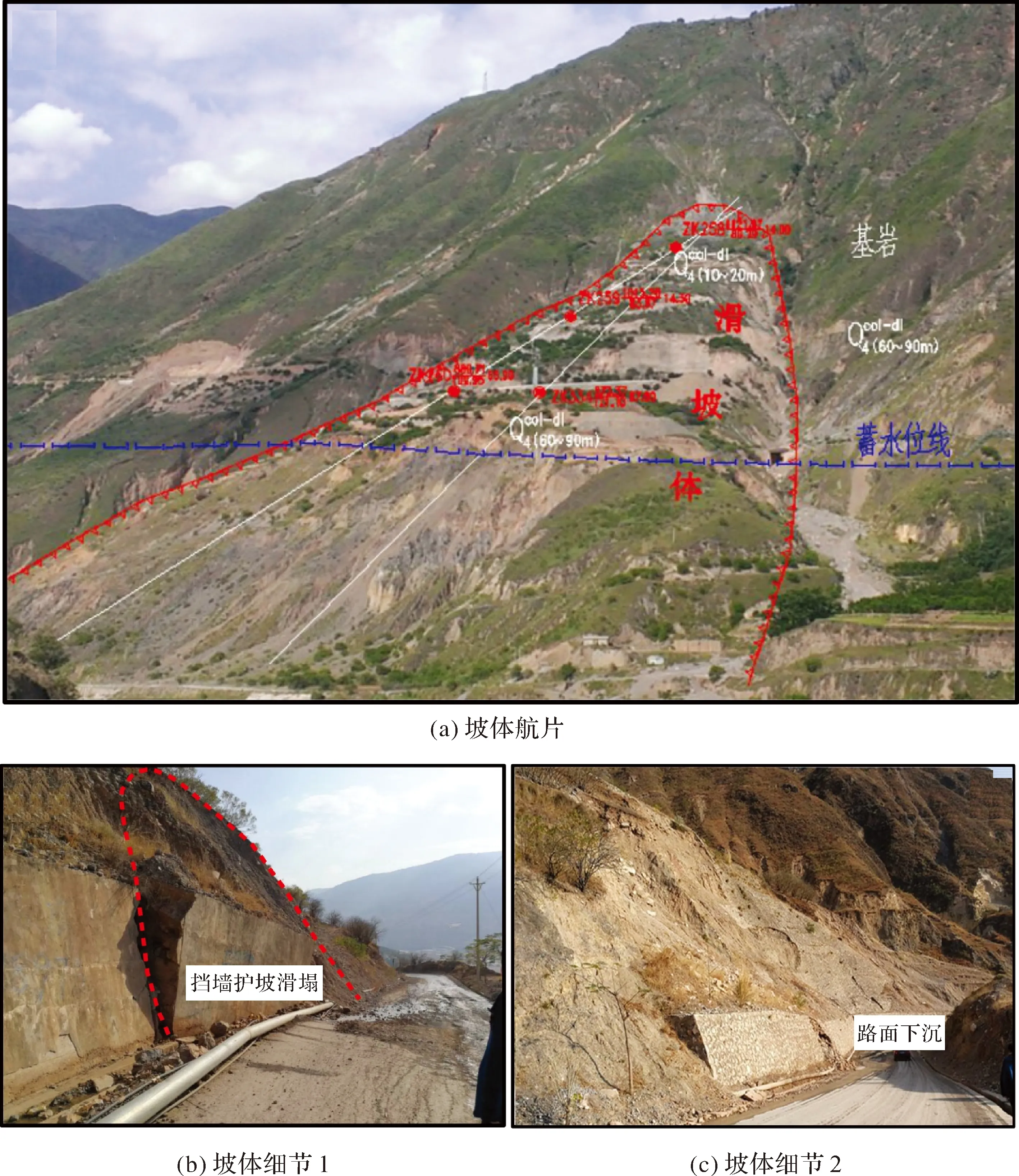
图7 王家山滑坡现场查证情况Fig.7 Interpreation and on-site investigation of Wangjiashan slope
根据InSAR监测结果的形变量级、形变面积及无人机航测飞行精细解译的地理环境、滑坡微地貌,同时考虑白鹤滩水电站水库蓄水后,堆积体有三分之一会被库水所淹没,在库水长期作用下,土体物理力学性质降低,堆积体稳定性下降,综合判断该坡体有发生整体滑动破坏的可能。由于目前滑坡呈堆积体状,若发生滑动整体坡体可能会引起金沙江主河道堵塞,产生的涌浪对附近居民、船舶均有安全威胁。因此综合评价该处风险高,建议采取专业监测和必要的工程治理措施。
3.3 三家村滑坡隐患点联合分析
XB23滑坡为三家村滑坡隐患点,位于四川省凉山州会东县溜姑乡三家村西北侧斜坡,金沙江左岸,中心点坐标为103°1′E,26°37′N,所在的坡体海拔在692~1428 m之间,高差约736 m。坡体的年平均形变速率如图8(a)所示。通过InSAR监测结果可以看出,坡体相干性较好,明显的形变区位于坡体中上部(如图8(a)蓝色虚线所示),通过选取特征点P1、P2、P3可以看出,最大视线向形变速率约30 mm/a,坡体变形在1~5月较缓,6~12月变形加速(图8(b)),显著形变面积约20×104m2。

图8 三家村滑坡形变情况Fig.8 Investigation on Sanjia village slope
根据无人机航测飞行得到的航片(图9),通过DEM所生成的山体阴影图进行三维建模解译(图8(c))可以看出,三家村滑坡整体呈圈椅状地貌,边界清晰,后缘可见明显的滑坡下错迹象,坡表冲沟和小规模滑塌发育,前缘临空条件较好。根据变形特征可将该滑坡划分为1处崩塌(B01)和4处不稳定斜坡(X01、X02、X03和X04),如图9(a)所示。其中,B01崩塌(图9(b))呈长条状,目前主要以小规模崩落为主;X02、X03斜坡(图9(c)—(e))上部发生明显变形,与InSAR识别到的强形变区域相吻合。通过对航片进行详细解译可知,主滑坡为滑移式土质滑坡,滑体为早期形成的崩滑堆积体,X01斜坡(图9(d))上部形变迹象显著,冲沟发育,可见大量小规模滑塌。结合InSAR形变监测结果,X02、X03不稳定斜坡(图9(c)—(e))中部滑塌区已经发生了强烈变形,主沟已切至基岩,变形区未来有扩大的可能,并进一步牵引上部X04不稳定斜坡发生滑移。

图9 三家村滑坡现场查证情况Fig.9 Interpretation of Sanjia village slope
联合InSAR监测结果与航片综合解译,三家村滑坡现状整体稳定,局部稳定性差,主要表现为局部陡峻岸坡坍塌现象。水库蓄水后滑坡体局部稳定性变差,临江和临沟部分岸坡可能失稳,滑坡可能发生较大规模滑动,由于在该隐患点附近有3处居民点,且蓄水后的最终水位线(825 m)逼近上述居民点地面设计标高(826 m),滑坡产生的涌浪对居民点危害极大,建议在水库蓄水前和运行期间对滑坡体进行定期专业巡查。
3.4 联合监测结果探讨
基于无人机航测进行的野外验证与分析,在InSAR监测结果所圈定的38处潜在隐患点中,共确认了32个地灾隐患点,其余6处均为人类工程活动引起的形变,非地质灾害隐患点。从灾害类型区分,滑坡21处,占比65.62%;崩塌11处,占比34.38%。表2显示了每处的InSAR监测年均最大形变速率。本文依据2021年5月由国家市场监督管理总局国家标准化管理委员会发布的《地质灾害危险性评估规范》给出的地质灾害发育程度分级规范对无人机监测结果即每个坡体作出了有明显形变、局部欠稳定及无可见形变3种结果。其中,有明显形变的坡体存在崩塌、坍塌及垮塌等现象;局部欠稳定坡体有清晰可见的坡体后缘、侧缘、前缘,另有冲沟等现象;无可见变形坡体从微地貌等特征来看没有明显变形迹象。结合InSAR识别的形变区的形变量级、形变面积、是否涉水,无人机监测结果、威胁对象等因素,本文给出了采用专业监测和工程治理、定期专业巡查、群测群防及暂无须管控4种防治建议。根据以上标准,4处隐患点被列为专业监测和工程治理,7处隐患点被列为定期专业巡查,17处隐患点被列为群测群防,5处隐患点被列为暂无须管控。最后,将此次蓄水前确认的32个地质灾害隐患点进行入库,为后续地质灾害隐患监测预警及发电期地灾安全维护提供支撑。
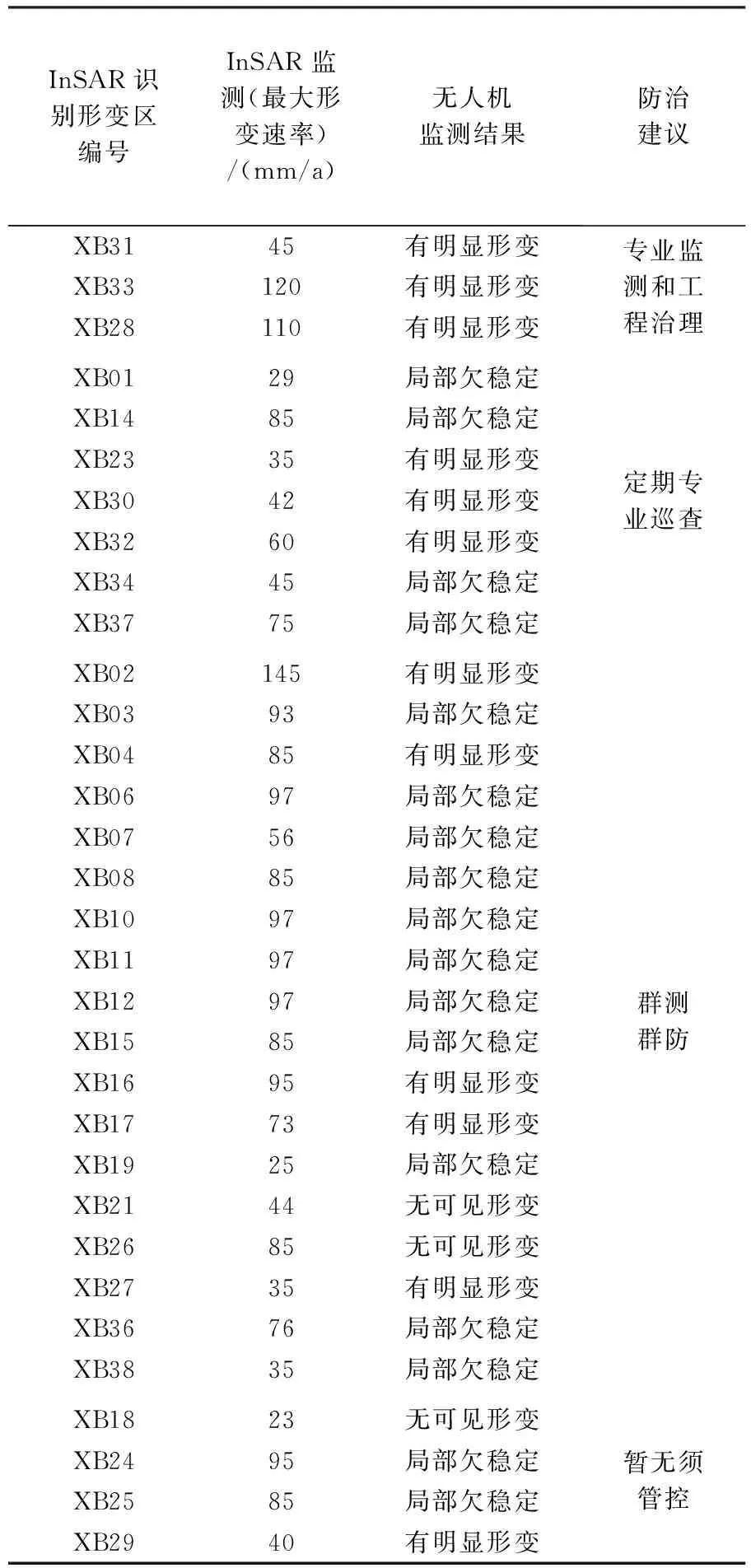
表2 隐患点详细信息
通过以上识别过程可以看出,InSAR技术不受环境与地形限制,具备全天时、全天候大范围影像获取与监测能力,但是由于其为微波成像,分辨率低,识别结果与地形地貌相结合分析的能力较差,需借助外部数据对监测结果进行判断与进一步分析。另一方面也受制于卫星重返周期(12 d/景),无法及时有效获取影像。而无人机航测技术灵活性高、对单个坡体监测效率高、成像分辨率高,能够准确发现裂缝,冲沟等滑坡微小地貌(表3)。同时还可通过建立三维模型等数字处理高精度还原地形地貌,辅助该区域综合分析判断。但是无人机受环境影响大,一次飞行覆盖范围有限,综合成本较高(表3)。因此,将InSAR技术与无人机航测技术进行联合分析,利用InSAR范围广的特点广域圈定形变范围与量级,确认潜在隐患点靶区,指导无人机重点飞行靶区提高飞行效率;利用无人机航测技术对重点区域进行分析,精细识别与分析隐患点的微地貌,验证InSAR结果,进一步结合形变迹象或破坏程度,最终综合确定地灾隐患点。两种技术互相弥补,可以以较高的监测效、较低的工作成本,高效完成广域高精度地灾隐患识别。
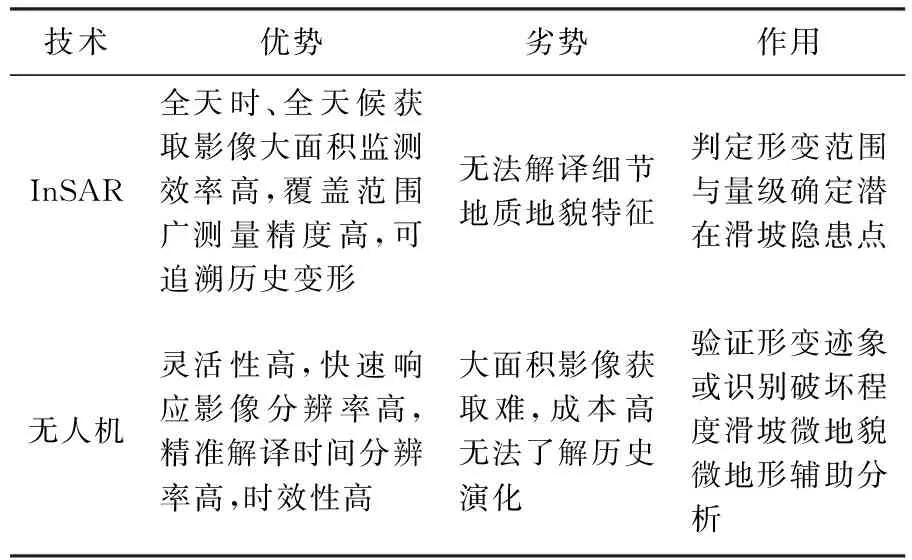
表3 InSAR与无人机各自优势对比与联合识别
4 结 论
本文针对金沙江流域白鹤滩库区重点库岸段(葫芦口-象鼻岭地段)开展联合InSAR与无人机航测的地质灾害隐患综合遥感识别研究。首先,基于Sentinel-1数据利用时间序列InSAR方法进行了广域的形变探测与潜在地质灾害隐患识别,共识别出38处变形显著的坡体。其次,结合无人机航测技术进行野外验证与分析,最终确认32处地质灾害隐患点。从灾害类型区分,滑坡21处,占比65.62%;崩塌11处,占比34.38%;根据蓄水后坡体涉水情况区分,有10处涉水隐患点,占比26.31%,28处非涉水隐患,占比73.68%。最后,结合每个隐患点的所在位置、形变量级、形变面积、相关的野外飞行航片及不同坡体的具体情况,给出了专业监测和工程治理、定期专业巡查、群测群防等防治建议,完成了库区蓄水前的地灾隐患点识别与建库工作,对蓄水后灾害分析与监测预警以及保障白鹤滩水电站的正常蓄水发电具有重要意义。
本文同时选取了形变面积与量级大且极易造成堵江风险的两处隐患点进行了详细分析,揭示了时间序列InSAR 技术与无人机航测技术对地灾隐患点的识别具有各自的作用与侧重点。两种技术各自单独使用中的优势、劣势与在隐患识别的作用见表3。
在综合分析中,要注意讲究策略,高效结合。InSAR结果对于无人机航测实施,可以指导重点区域,确定飞行范围,给出大致形变范围,指导航线规划重点,辅助航测安全高效地有针对性开展。无人机航测结果对于InSAR成果可进行交叉辅助验证,提供最新实时高分辨率影像,查明地质地貌细节,辅助评判风险等级,指导开展重点区域历史变形InSAR追溯分析。联合InSAR与无人机航测,可以兼顾广域全覆盖监测至局部细节获取,兼顾实时现状与历史变形追溯结合,高效且安全,实现测绘加地质综合研判。
综上所述,两种技术在高山峡谷区域水库库岸灾害识别需要充分的发挥各自的优势,利用InSAR不受环境限制,覆盖范围大等优势开展广域灾害点识别,利用无人机高分辨率、快速高效的优势开展重点坡体与库段的精细解译,联合使用做到发现、验证及综合研判的一体化,全面、高效地实现库岸广域地灾隐患点识别。本文对高山峡谷库岸区域的地灾隐患识别提供了联合InSAR与无人机航测的综合遥感识别思路与方法,对水库岸地质灾害广域识别具有较好示范作用与应用价值。