广域滑坡灾害隐患InSAR显著性形变区深度学习识别技术
2022-11-04葛大庆于峻川马燕妮刘宏娟
吴 琼,葛大庆,于峻川,张 玲,李 曼,刘 斌,王 艳,马燕妮,刘宏娟
中国自然资源航空物探遥感中心,北京 100083
滑坡是山区常发生的一种地质灾害,山体斜坡受重力或其他外界因素作用,特别容易在一个或数个软弱结构面产生剪切位移而突然下降,对人民生命财产和工程设施安全构成重大威胁。我国山区面积占比大,地质灾害频发。尽可能提早识别和发现潜在活动性滑坡,对我国防灾减灾至关重要。一般滑坡源区在演化成灾前,表面通常会出现明显的变形现象[1-2],因此,开展以形变探测为主的滑坡灾害隐患识别和排查,可以为滑坡灾害的防范提供科学的决策依据。
目前,滑坡形变监测主要包括地面监测技术和遥感监测技术等[3-5]。其中,基于地面监测技术,如利用GNSS观测站、精准水准仪、裂缝计、加速度计、倾角计等监测边坡地表的移位变形,这类监测方法受地形条件、人力成本等因素制约,导致观测仪器视野、监测点数量或配套的辅助电子远程监测网络受限,只能获取离散点观测数据,对局部地质灾害隐患区的监测防范有效,但无法进行大范围的形变监测[6]。我国地质灾害点多面广,从近年来发生的大型山体滑坡分析发现,新生地质灾害具有高位、隐蔽性、人不能至等特点,并呈现堵江溃坝链式灾害。仅靠地面监测方法无法全面识别和发现地灾滑坡隐患[7]。遥感技术以其宏观、快速等优势弥补了上述方法的不足,被广泛地应用于滑坡灾害普查中,特别是干涉合成孔径雷达(interferometric synthetic aperture radar,InSAR)已被证明是监测滑坡地表变形的最独特、有效的手段方法,是传统地面监测方法、光学卫星遥感技术很好的补充[8-10]。
目前,滑坡灾害隐患显著性形变区识别主要基于PS-InSAR、DS-InSAR或者两种联合点时序分析方法获取形变信息,结合专家经验对相干目标的年平均形变速率图和时序数据进行目视解译,识别显著性形变区,这种方法依赖专业人员,工作量大、效率较低[11-16]。通过对相干目标形变速率设定阈值,进行空间聚类识别显著性形变区,这种方法受不同区域阈值设定变化和数据噪声的影响,存在一定的局限性[17]。在利用深度学习实现滑坡隐患自动识别方面,目前主要面向小范围区域进行自动识别,利用光学影像、地形数据及衍生数据,通过自主设计浅层的卷积神经网络构架[18-20],或在经典的神经网络模型构架基础上,结合注意力机制、迁移学习理论等,对有明显变形迹象的斜坡变形破坏区进行自动识别[21-22]。因其光谱和纹理特性与背景环境具有明显的差异,自动识别率可达80%以上[21-22]。然而,基于InSAR技术和深度学习相结合用于广域尺度的滑坡灾害隐患区自动识别研究较少,自动识别效果与适用性还需要进一步探索、分析与研究。
针对上述问题,本文基于Stacking InSAR技术获得年平均形变相位数据,利用深度学习网络模型对复杂背景下显著性形变区强语义特征进行提取和学习,判识疑似的滑坡灾害隐患区,确定显著性形变区边界。探索性地将上述技术方法推广到一定的广域范围和动态更新数据集,识别潜在的滑坡灾害隐患区。结合野外验证,分析本文技术方法在滑坡灾害隐患探测中的效果,为推进深度学习用于广域InSAR形变监测工程化应用提供思路和参考。
1 数据与方法
1.1 数据源
本文选择覆盖我国多省2017—2020年Sentinel-1卫星升、降轨数据开展滑坡灾害隐患InSAR显著性形变区识别试验,试验区地处我国地质灾害高、中易发区,主要覆盖我国5省(自治区):青海、宁夏、甘肃、四川、云南(图1)。Sentinel-1卫星是欧洲航天局哥白尼计划(GMES)中的地球观测卫星,由两颗C波段雷达卫星组成,单星重访周期为12 d,双星重访周期为6 d,具备多模式成像方式、长期固定成像范围和连续成像的能力。其中宽幅干涉(interferometric wide swath,IW)是以TOPS成像模式实现250 km范围成像,通过片段合成确保重复轨观测数据可以进行干涉处理。本文选择单星S1A-IW模式SLC数据,极化方式为VV+VH,收集Sentinel-1卫星数据共计1076景,开展广域尺度下地灾隐患早期识别监测。表1列出使用数据的具体情况。

表1 本文使用的Sentinel-1卫星数据主要信息

图1 试验区位置、样本选择与分布Fig.1 Location of study area, samples selection and distribution
1.2 Stacking InSAR技术
本文开展广域尺度下的地质灾害隐患普查监测研究,选择Stacking InSAR技术获得年平均地表形变相位图和形变速率图,进一步检测识别显著性形变区。Stacking InSAR技术是干涉图堆叠时序InSAR方法,通过多主影像控制时空基线,获得多幅解缠的差分干涉图后,将干涉相位进行累加,有效解决时间和空间去相干问题,降低大气扰动的影响,是一种提高形变解算精度的方法之一,易于刻画InSAR显著性形变区形态特征。线性相位速率p计算公式为
(1)
式中,Δtj为第j组差分干涉图的时间间隔;φj为第j组的解缠差分干涉相位[23-24]。
Stacking InSAR技术处理Sentinel-1数据主要步骤如下。
(1) 将Sentinel-1 TOPS 3个子条带数据拼接成完整的SLC影像。选取某一期SLC影像作为主影像,其他期影像统一配准到主影像雷达坐标系下。其中覆盖试验区同一条轨道数据按照先拼接、配准,再裁剪分幅的原则进行处理。
(2) 干涉像对选取。选择空间基线120 m和时间基线40 d作为阈值,对选取的数据集进行差分干涉处理。
(3) 差分干涉计算。依据卫星轨道参数和地球椭球体模型计算平地相位,利用配准后DEM计算地形相位,从干涉相位中去除平地和地形相位,逐像元计算生成差分干涉图。
(4) 相位解缠。在相位解缠过程中采用的是最小费用流算法。
(5) 相位叠加处理。选取解缠相位图较为理想、解缠结果在试验区无明显跳变的组合,利用加权叠加估算线性形变速率。一般4—9月的解缠的相位数据时间阈值设置为12 d。
(6) 趋势性条纹去除。通过空域低通和时域高通滤波处理,进一步分离大气相位,获得形变相位图,并计算LOS方向的形变速率。
(7) 地理编码。利用DEM坐标系与影像坐标系的转换查找表,将形变相位图和速率图转换到地理坐标系下。其中DEM为日本宇航局ALOS WORLD 3D空间分辨率30 m数据。
1.3 深度学习方法
深度学习在图像目标检测、语音识别、自然语言处理等领域取得了较好的应用[25]。其中区域卷积神经网络(region-based convolutional neural network,R-CNN)是深度学习的经典模型,属于两阶段(two-stage)算法,通过提取目标候选框,再对候选框做分类与回归,准确率优于一阶段(one-stage)算法。R-CNN系列算法有R-CNN、Fast R-CNN、Faster R-CNN、Mask-RCNN等[26-29]。本文利用Mask-RCNN进行滑坡隐患显著性形变区提取,Mask-RCNN是在Faster R-CNN基础上增加一个分支网络,用于mask像素分割,本文最终确定的滑坡隐患显著性形变区范围由此获得。
在试验中,数据源是Stacking InSAR方法处理获得的2017—2020年3 a平均形变相位图像,共计13个图幅,每个图幅形变相位图像大小为9000×8000像素,将地表形变相位图像作为输入数据,利用深度学习网络模型对复杂背景下显著性形变区强语义特征进行提取和学习,判识显著性形变区。参考谷歌地球光学影像,在ArcGIS平台上,通过目视解译在形变相位图上获得显著性形变区面矢量数据。其中11个图幅影像用于深度学习模型训练,2个图幅影像用于测试,评估Mask-RCNN识别效果,样本选择与分布如图1所示。考虑样本训练过程受物理内存限制,将参与训练的形变相位图像裁剪成多张256×256像素样本,获得总样本数1049个,随机抽取70%的样本作为训练数据,30%的样本作为验证数据。样本真值包含2类:InSAR显著性形变区与背景值(图2)。训练数据集转换为COCO数据集JSON文件格式存储。

图2 部分样本Fig.2 Part of sample labels
本文在显卡配置GeForce GTX 1080Ti,11 GB显存,显存位宽352 bit的硬件环境下,基于Pytorch框架下实现Mask-RCNN模型训练和测试。模型训练的初始参数采用COCO预训练模型e2e_mask_rcnn_R_50_FPN_1x.yaml,网络模型训练设置:基础学习率为0.000 1,批量大小为5,最大迭代次数为100k。将训练后的最优模型分别对测试和动态更新数据集进行预测,获得含有InSAR显著性形变区与背景的识别结果图,赋予原始影像投影坐标,进行二值化、细化、追踪、拓扑化处理,将栅格生成多边形要素图层,确定InSAR显著性形变区边界。
1.4 精度评价
考虑到滑坡灾害隐患InSAR显著性形变区范围的特殊性(边界模糊),通过分析预测结果与实际人工目视解译真值一致性, 采用精确度(precision,P)、召回率(recall,R)、F1score评价指标, 评估识别方法的有效性[30]。具体公式为
(2)
(3)
(4)
式中,TP为正确分类数量;FP为错误分类数量;FN为漏分数量;P为精确度;R为召回率;F1score综合了P和R的结果[30]。
2 结果与讨论
2.1 滑坡灾害隐患显著性形变区识别结果评价
2.1.1 测试数据集验证
本文选择的测试数据集1位于我国甘肃和青海省内,测试数据集2位于四川和云南省内。利用获得的最优模型对测试数据集进行预测,在模型预测前需要将每一图幅影像进行切割,设置切割大小为512×512像素,切割重叠度为0。采取分块读取、预测,镶嵌还原整幅识别图策略。基于Mask-RCNN的滑坡隐患显著性形变区识别精度评价见表2。图3和图4是测试数据集1的识别结果图,图5—图7是测试数据集2的识别结果图。由识别结果可以看出,形变相位图条纹不明显位置,存在错分和漏分现象,人为活动引起的地表形变被错分为山坡体变形,如采矿导致的地面塌陷和山体改造成农田或者其他用地。由于未结合地形数据,仅利用形变相位图导致了错误分类。同时一些较小的形变区也存在漏分问题,可能在原始FPN网络下采样获得显著性形变区强语义信息的同时,弱化了细节信息,导致低分辨率特征图难以实现对小像素点的识别。

图3 测试集1识别与真值比较Fig.3 The identification and ground true results of test data 1

图4 测试集1部分(蓝色框)识别与真值比较Fig.4 The identification and ground true results of the blue box in test data 1
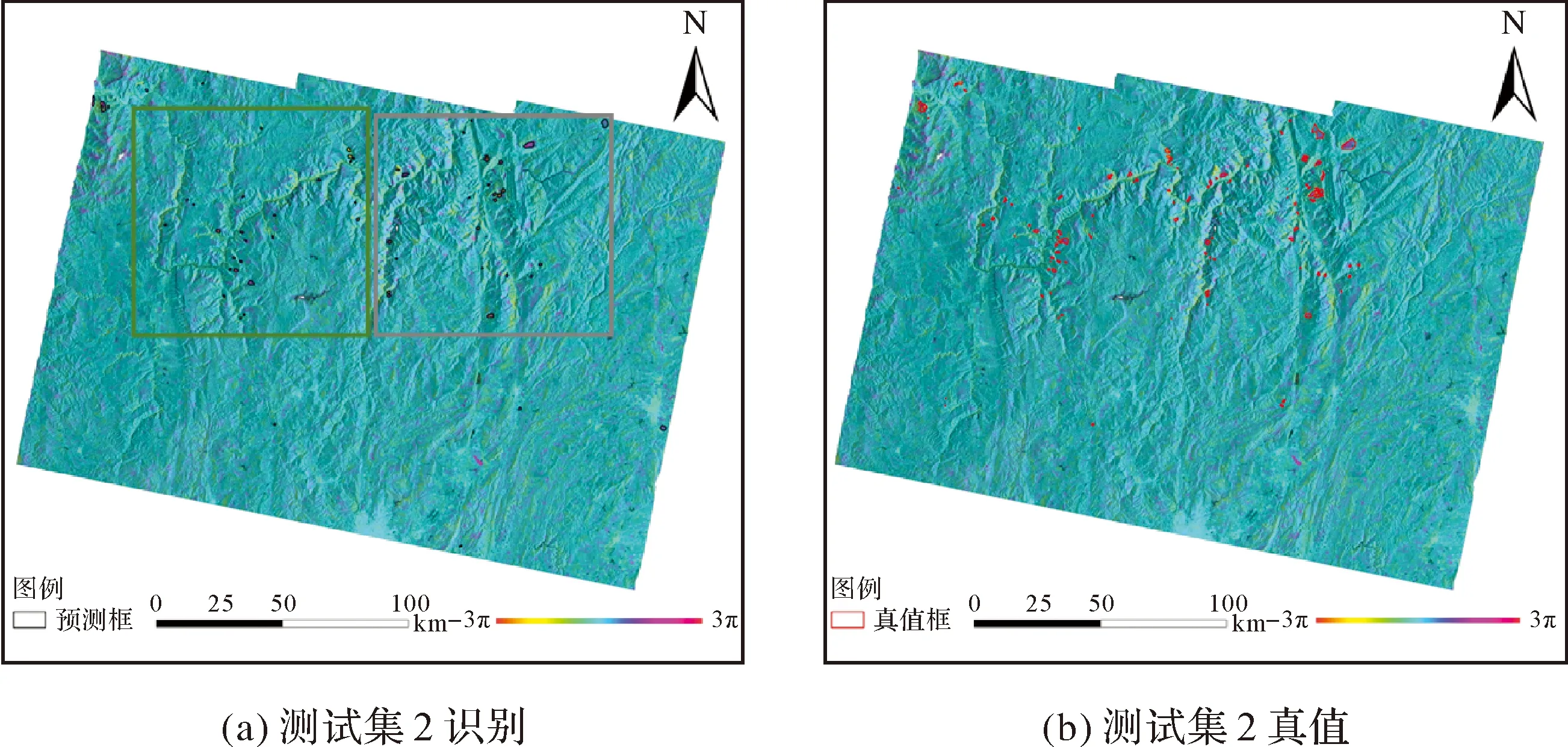
图5 测试集2识别与真值比较Fig.5 The identification and ground true results of test data 2
图6 测试集2部分(绿色框)识别与真值比较Fig.6 The identification and ground true results of the green box in test data 2
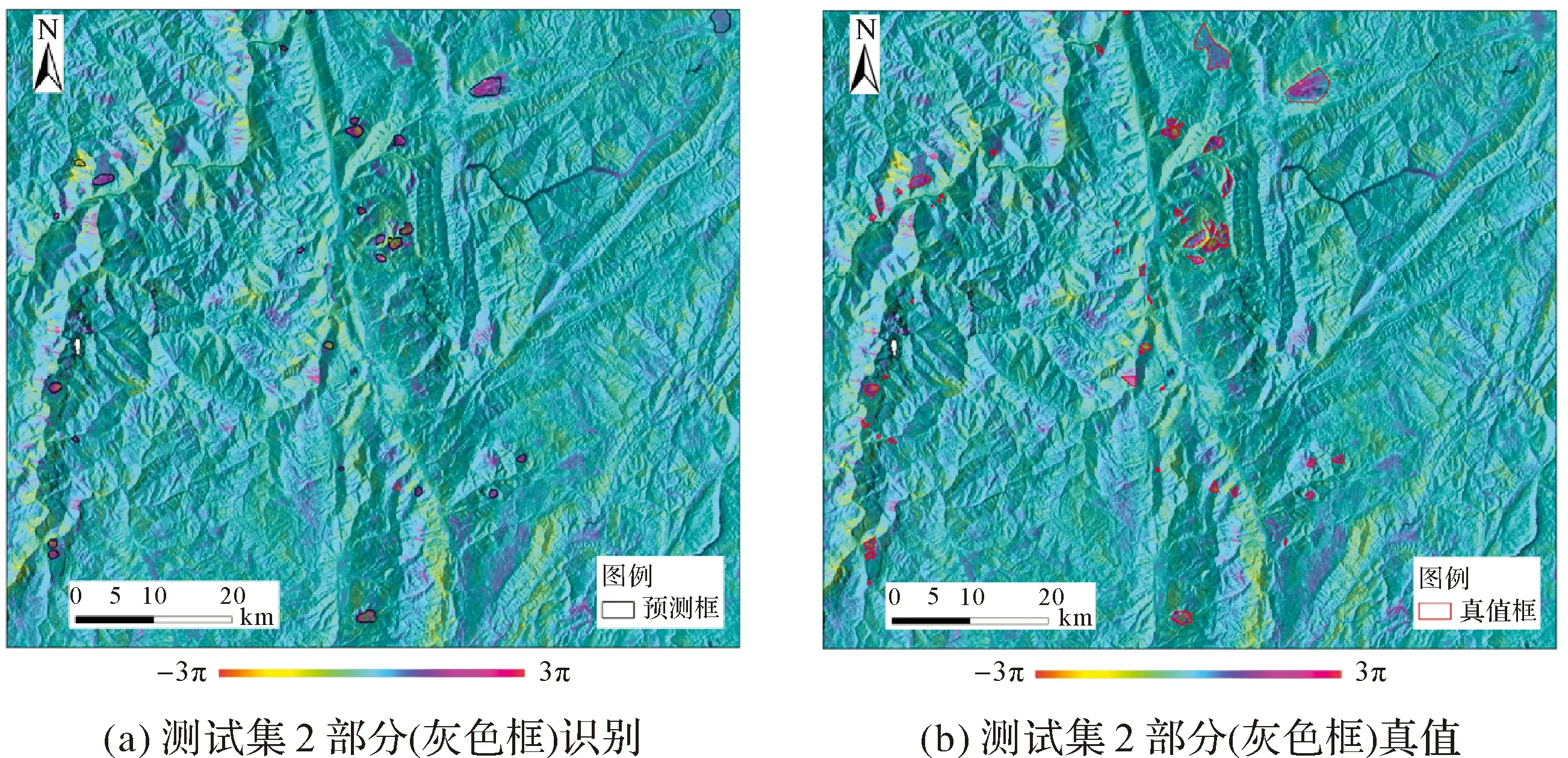
图7 测试集2部分(灰色框)识别与真值比较Fig.7 The identification and ground true results of the grey box in test data 2
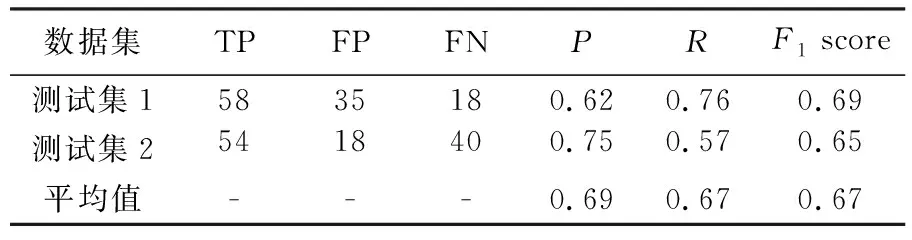
表2 测试数据结果精度对比
2.1.2 模型迁移性验证
为了证明Mask-RCNN在广域尺度下滑坡灾害隐患显著性形变区识别迁移能力,将获得的最优模型应用于动态更新数据集,验证识别效果。动态更新数据集位于我国青海和甘肃省内,在2017—2020年数据基础上补充了2020—2021年128轨道28景Sentinel-1卫星数据,采用Stacking InSAR方法获得2017—2021年的4 a平均地表形变相位图像。基于Mask-RCNN的显著性形变区识别结果如图8—图11所示,精度评价见表3。从识别精度对比发现,动态更新数据识别精度高于测试数据精度,原因可能是动态更新数据仅在时间尺度上发生了变化,且所在区域是训练样本比较集中的区域,因此识别精度较高;测试数据集在空间上跨越比较大,在较少样本的情况下,样本的空间分布对不同区域地理环境特征体现不足,识别精度偏低。
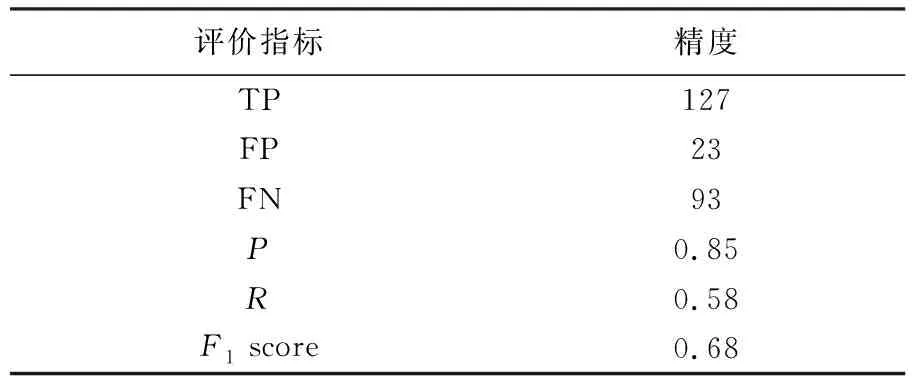
表3 动态更新数据结果精度评价
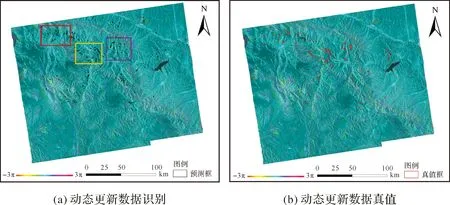
图8 动态更新数据识别与真值比较Fig.8 The identification and ground true results of dynamic updated data

图9 动态更新数据部分(红色框)识别与真值比较Fig.9 The identification and ground true results of the red box in dynamic updated data
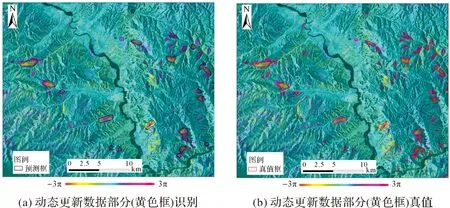
图10 动态更新数据部分(黄色框)识别与真值Fig.10 The identification and ground true results of the yellow box in dynamic updated data
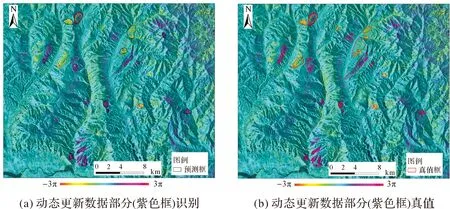
图11 动态更新数据部分(紫色框)识别与真值比较Fig.11 The identification and ground true results of the purple box in dynamic updated data
2.2 与阈值分割法对比
为验证本文方法在广域滑坡灾害隐患显著性形变区自动识别的有效性,将其与阈值分割法识别结果作对比。采用阈值分割法,选择测试集2形变速率图作为试验,经多次阈值设置,确定阈值为-20 mm/a时,滑坡隐患形变区分类效果较好。但是阈值分割法在不同的区域,需要设置不同的阈值,不具有普适性。
另外,从识别结果图12左侧发现,大量的噪声点被误判为滑坡隐患显著性形变区,这证明了本文方法在分离噪声数据上优于阈值分割法。因此,试验结果表明本文方法广泛适用于滑坡隐患显著性形变区自动识别。
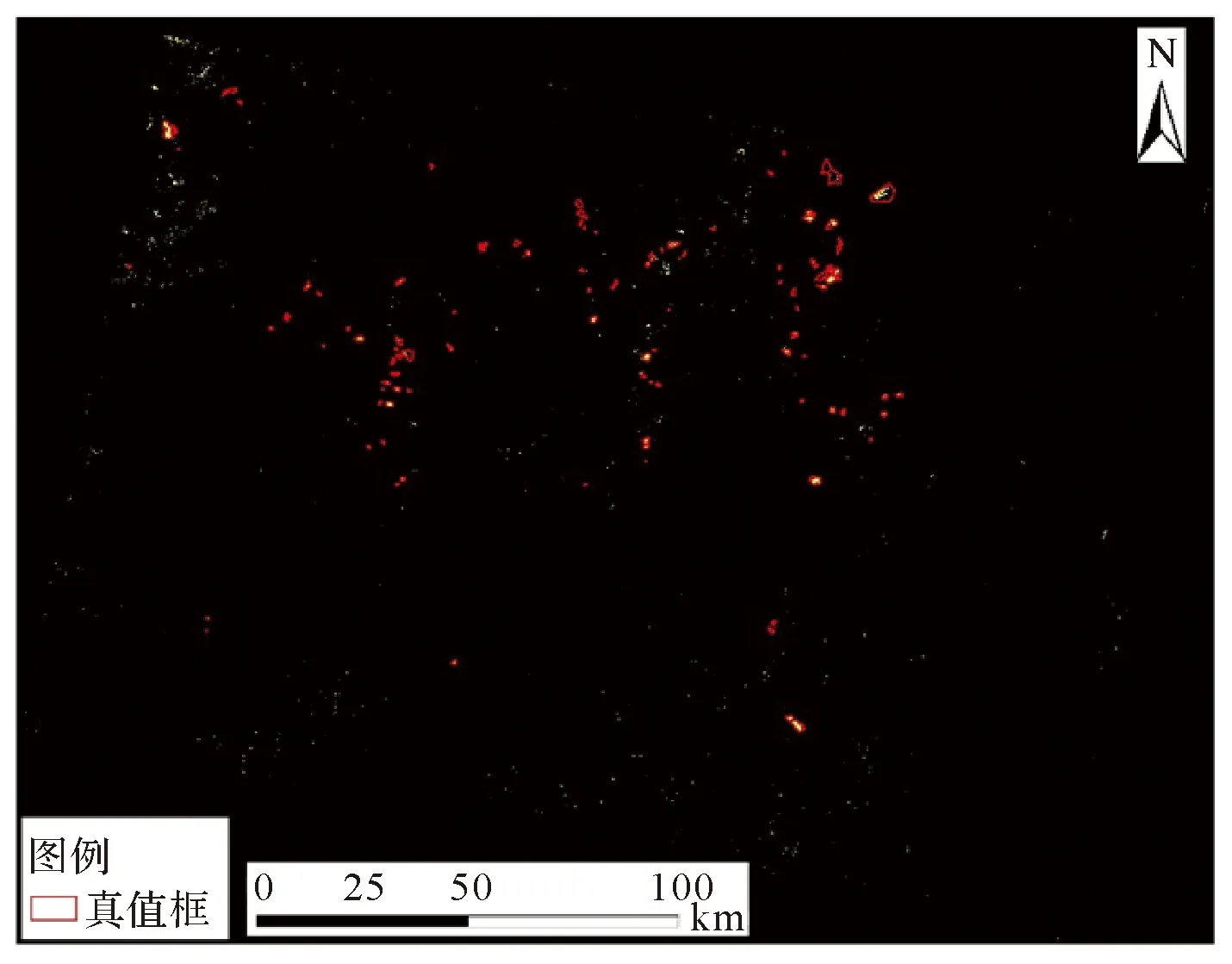
图12 阈值分割法识别与真值比较Fig.12 The identification results based on threshold segmentation method and ground true results of test data 2
2.3 野外验证
为验证Stacking InSAR技术提取的形变数据可以判识正在变形的地质灾害隐患,笔者所在团队开展了野外核查工作,野外调查点覆盖我国四川攀枝花、凉山和云南昆明、曲靖、昭通等地,共查证疑似滑坡隐患点23个,结果发现通过InSAR技术识别及结合光学影像解译综合判识疑似地灾隐患,识别总体效果较为可靠[31]。
笔者对测试数据集2部分识别结果和野外地灾隐患点进行了对比,如图13—图14所示。野外验证数据与本文识别滑坡隐患点具有较好的一致性,坡体存在一定形变现象,在坡体前缘分布着河流。这也验证了本文使用的技术方法在广域地灾隐患早期识别中具有可行性。利用深度学习智能识别正在变形的滑坡隐患形变位置与分布,并对其进行定期观测,可以为地质灾害监测预警提供重要参考。
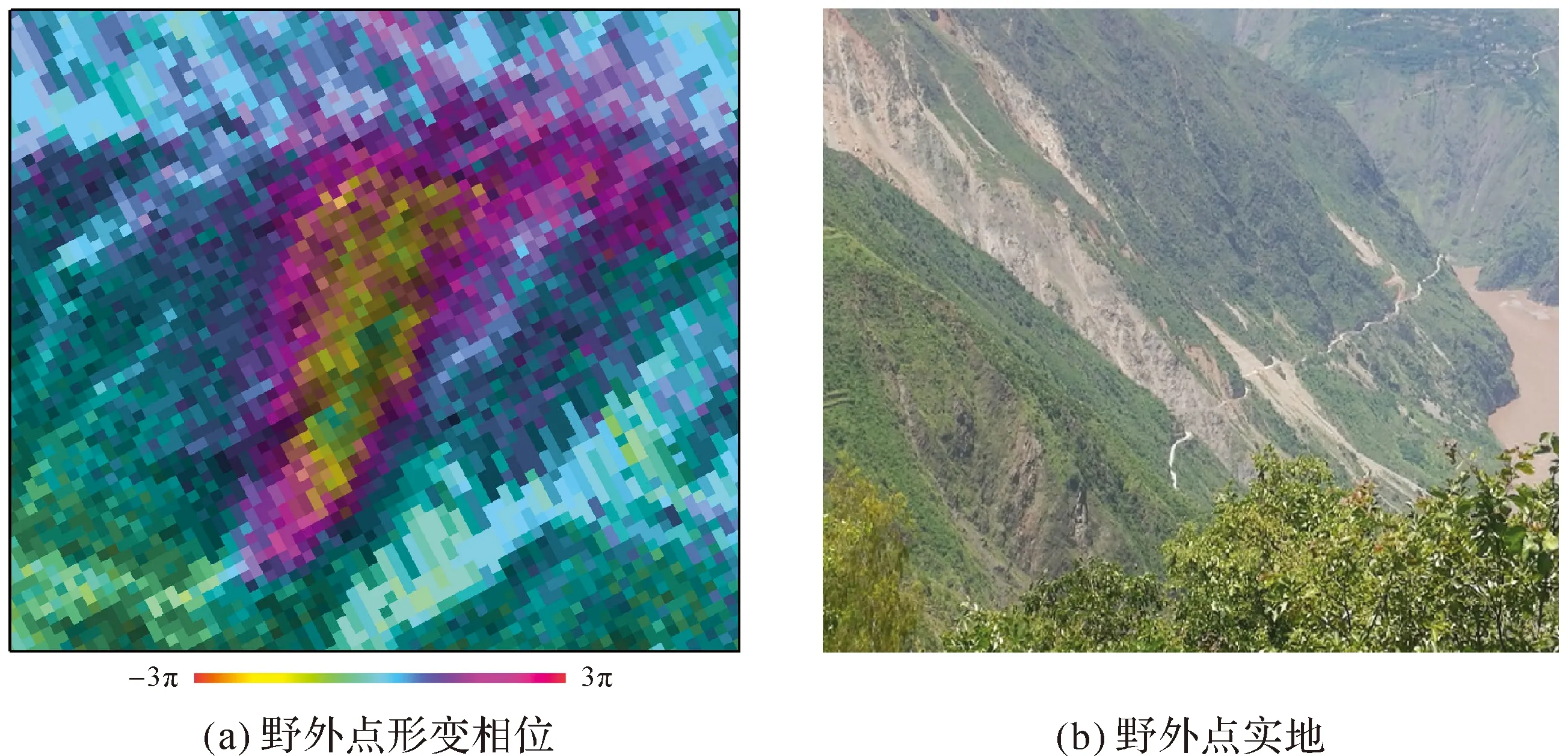
图13 野外点形变相位与实地对比Fig.13 Comparison of the phase data of surface deformation and field map
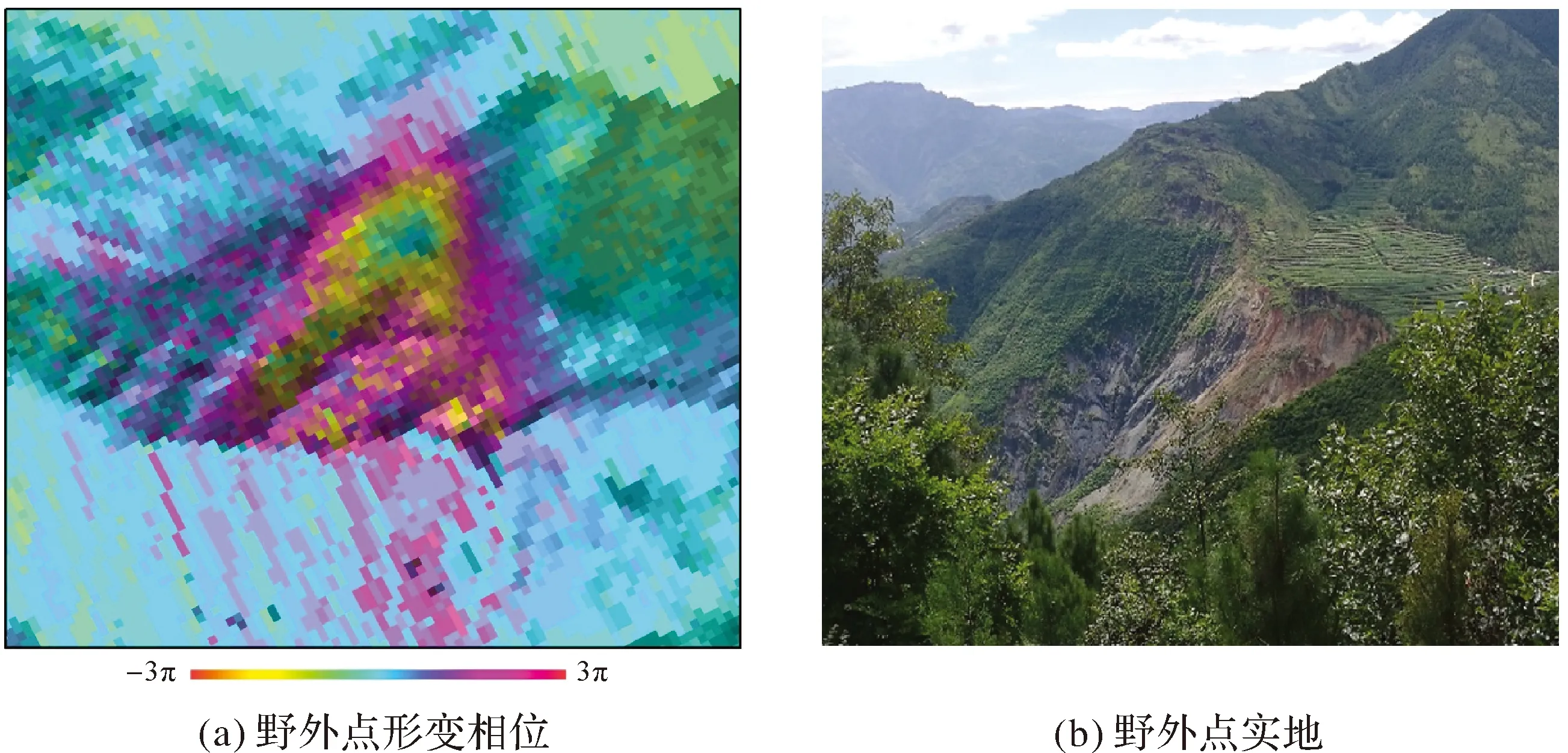
图14 野外点形变相位与实地对比Fig.14 Comparison of the phase data of surface deformation and field map
3 结论与展望
本文以InSAR形变数据为数据源,利用深度学习网络模型对复杂背景下显著性形变区强语义特征进行提取和学习,将训练好的最优模型对我国青海、甘肃、四川和云南等省地滑坡灾害隐患显著性形变区进行了预测,在样本较少的情况下,识别总体效果较优,一定程度上降低了人工目视解译工作量。同时对动态更新数据集显著性形变区进行了预测试验,证实Mask-RCNN具有一定的迁移能力。
由于InSAR技术应用条件、背景环境的复杂性,滑坡灾害隐患显著性形变区识别正确率仍有待提高,未来将进一步探索针对地质条件诱发灾害一致的区域进行样本学习,考虑结合多源数据如地形、地层岩性、地质构造等,设计专用的深度学习网络构架,提高识别精度,推进工程应用化,实现地质灾害隐患显著性形变区实时动态监测,为地质灾害监测预警提供技术支撑。
致谢:感谢欧空局(ESA)提供的Sentinel-1卫星雷达数据;感谢中国自然资源航空物探遥感中心地质灾害调查监测中心童立强教授、郭兆成教授、王珊珊博士等提供的野外调查资料和论文指导。
