货运索道支架位置自动搜索方法
2022-11-03张飞凯李其莹
秦 剑 ,张飞凯 ,李其莹 ,刘 晨
(1. 中国电力科学研究院有限公司,北京 100055;2. 国网山东省电力公司,山东 济南 250001)
随着新基建进程的逐步推进和人们环保意识的逐渐提升,特高压电网建设不断对施工效率和成本提出更高的要求. 然而,由于特高压等输电线路路径走廊经常会经过交通不便甚至是人迹罕至的深山老林或崇山峻岭,输电线路建设过程中的物料运输一直是制约电网建设效率和成本的一大因素. 作为一种运输效率高、运输成本低、地形和环境适应能力强的运输方式[1],货运专用索道被越来越多地应用于输电线路施工过程中的物料运输中[2].
为进一步降低货运索道的运输成本,提高运输效率,很多学者尝试对索道结构和设备进行研究和改进. 例如:缪谦等[3-5]研究了货运索道运输技术与设备;江明等[6-10]提出了一系列承载索和索道整体结构的方案及计算方法;白雪松等[11]开发了一种货运索道工作索计算软件,李洋等[12]设计了一种辅助索道方案优化设计平台. 而索道的架设路径也能够在很大程度上影响货运索道的物料运输效率和成本. 相对于传统的依靠人工现场勘查的索道路径规划方法,索道路径自动规划方法所考虑的备选上下料点、备选索道路径更加全面,而规划所耗费时间短,可大幅减少人工和经济成本. 在路径自动规划研究领域,王刚等[13]基于改进的A* 算法进行了输电线路路径智能选线研究;刘亮亮[14]基于蚁群算法构建了超高压输电线路路径选择的规划模型;谢景海等[15]提出了一种用于输电线路路径搜索的改进蚁群优化算法. 这些研究对货运索道的路径规划研究有较大的借鉴意义,但总体来说,现有关于货运索道的路径自动规划研究较少,且无法实现索道路径的自动规划.例如李攀等[16]设计了一种三维GIS 辅助山区输电线路货运索道选线系统,但是,由于索道支架位置自动搜索方法的缺失,该辅助选线系统仅实现了索道路径规划选线的半自动化.
因此,本文提出了3 种在二维地形剖面上进行索道支架位置自动搜索的方法:凸包点遍历法、地形自适应法和干涉点搜索法,并对这3 种方法进行对比分析,提出适用于工程实际的索道支架位置搜索方法,实现输电线路货运索道路径规划的自动化.
1 索道支架位置自动搜索流程
1.1 索道路径二维地形剖面
搜索输电线路货运索道支架位置时,需要先提供如图1 所示的索道路径二维地形剖面数据. 图中坐标轴的原点O是上料点在水平面上的投影点,横坐标s经过下料点在水平面上的投影,表示水平距离,纵坐标z表示高度. 因此,索道路径二维地形剖面数据可以用坐标(st,zt)表示,其中t为地形剖面上的点. 受索道运输技术的限制,索道路径的长度一般不超过3 000 m.
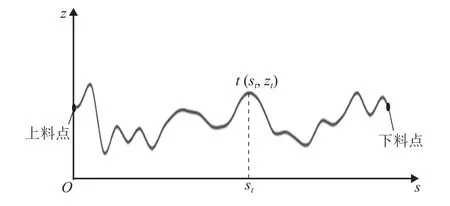
图1 索道路径二维地形剖面数据示意Fig. 1 Schematic of 2D terrain profile data of cableway path
1.2 索道承载索曲线
在自身重力、外部载荷和内部张力的共同作用下,相邻两个支架之间(编号为λ和λ+ 1)的索道承载索会发生下垂,下垂后的承载索曲线g(λ,λ+1) 可采用抛物线近似,如式(1)所示[17].

式中:z0为承载索曲线上的点相对曲线起点的高度值;s0为承载索曲线上的点相对起点的水平距离;l为承载索曲线的终点相对起点的水平距离;C为承载索曲线的终点相对起点的高度值;f为承载索曲线的跨中垂度,其取值范围为0.050l~ 0.080l,模拟承载索载重情况下,可采用f= 0.065l.
1.3 索道支架位置要求
在进行索道支架位置搜索时,考虑到安全性、适用性和经济性,需要对支架位置提出以下要求:
1) 索道的支架位置必须保证承载索曲线与地面间的距离合适,以避免索道运行过程中货物触地;
2) 相邻支架间的最大跨距不宜大于400 m;
3) 相邻支架间的最小跨距不宜小于20 m;
4) 中间支架数量不大于7 个;
5) 弦倾角小于45°.
1.4 主要流程
如图2 所示,在自动搜索索道支架位置时,需要经过以下步骤:
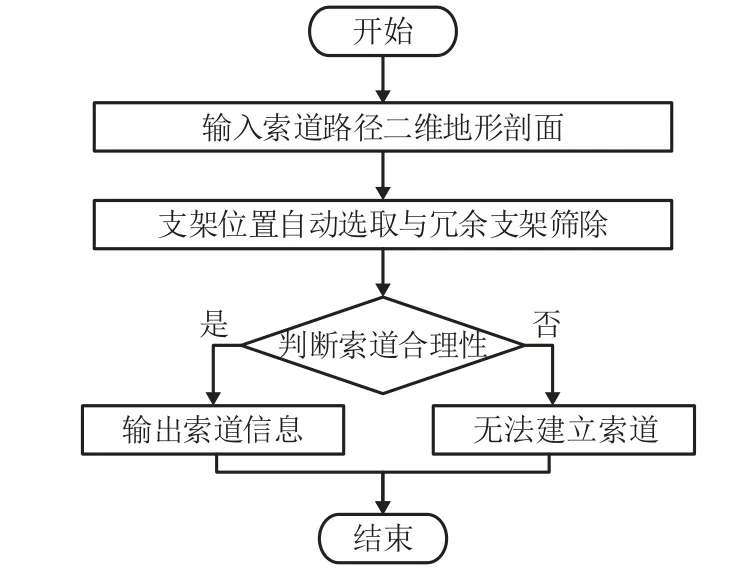
图2 索道支架位置搜索主要流程Fig. 2 Search process of cableway trestle position
步骤1索道支架位置自动搜索与冗余支架筛除. 根据索道路径二维地形剖面数据和索道承载索曲线方程,初步搜索满足索道支架位置要求1)、2)的索道支架位置,并删除多余支架以实现对支架位置的确定.
步骤2判断索道合理性. 根据索道支架位置要求3) ~ 5),判断索道支架位置搜索方案是否合理.
2 索道支架位置自动搜索方法
2.1 凸包点遍历法
如图3 所示,凸包点遍历法首先搜索出地形上所有凹度小于零的凸包点,然后在每个凸包点建立支架;再判断相邻支架间的距离,如果所有相邻支架间的距离都小于400 m,则该索道支架位置方案初步可行,后续根据其他条件判断合理性;否则,说明使用本方法在该二维地形剖面上无法建立索道.
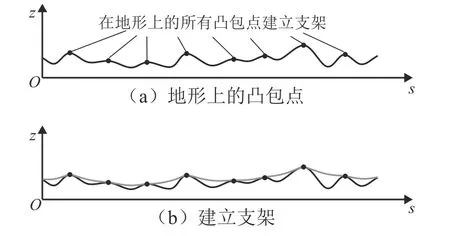
图3 凸包点遍历法原理示意Fig. 3 Schematic of principle of convex-point traversal method
在所有凸包点建立支架必然会造成支架数量冗余,因此,凸包遍历法还需要对冗余支架进行筛除.对支架λ(λ= 1, 2, 3, …)进行冗余支架筛除的步骤如下:
步骤1如图4(a)所示,找出支架λ右侧且距离小于400 m 的所有支架(编号为λ+ 1,λ+ 2,λ+ 3,…,γ,其中,γ为支架λ右侧所有支架的最大支架编号),并令η=λ+ 2.
步骤2如图4(b)或图4(c)所示,在支架λ和支架η之间建立承载索曲线g(λ,η) ,并判断曲线是否与地形干涉(当承载索曲线与地形剖面的高度差小于1 m 时,认为承载索曲线与地形干涉):如果干涉(如图4(b)所示),说明支架λ和支架η之间的支架未必是冗余支架,所以直接进入下一步;如果不干涉(如图4(c)所示),说明支架λ和支架η之间的支架都是冗余支架,删除这些冗余支架(如图4(d)所示)并进入下一步.
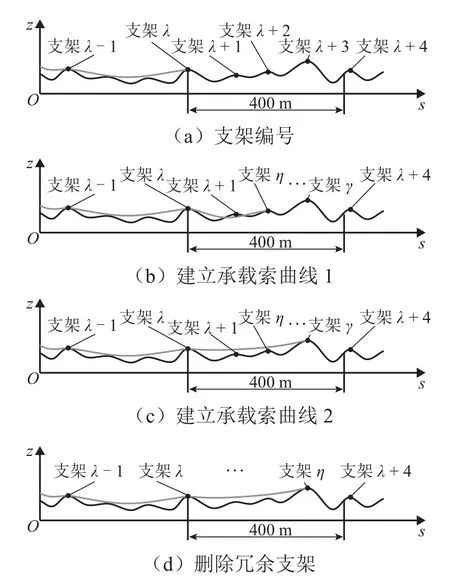
图4 冗余支架筛除示意Fig. 4 Schematic of deleting redundant trestles
步骤3令η=η+ 1,重复步骤2,直至η=γ.
2.2 地形自适应法
地形自适应法首先在地形曲线的上方建立一条单跨索道承载索曲线(承载索曲线的起点和终点分别位于上料点和下料点正上方),然后控制索道承载索曲线起点和终点逐渐平移下落,靠近上料点和下料点. 在下落过程中,承载索曲线会与地形发生干涉. 每当干涉发生时,在干涉点的位置为索道添加一个中间支架(干涉点的位置为二维地形与承载索曲线的高度之差最大的位置),阻止干涉发生并使得承载索曲线适应地形,直至承载索曲线起点和终点分别与上料点和下料点重合.
如图5 所示,该方法的原理可以通过以下步骤进行解释:
步骤1在上料点和下料点位置设置a和d两点,建立索道承载索曲线(如图5(a)所示),判断承载索曲线是否与地形干涉. 如果不干涉,那么上料点和下料点之间只需要建立一个单跨索道g(a,d) 即可;如果干涉,同时向上平移点a和点d,直到承载索曲线与地形之间仅有一个干涉点m(如图5(b)所示).
步骤2在该干涉点处设置中间支架m,并分别建立承载索曲线g(a,m)和g(m,d) . 然后,将点a和点d向下移动一定的距离,判断g(a,m)和g(m,d)与地形是否干涉,并分别找到干涉位置b1和c1(如图5(c)所示).
步骤3分别在干涉点处设置新的中间支架b1和c1,并分别建立承载索曲线g(a,b1)和g(c1,d) ,然后,将点a和点d向下移动一定的距离,判断g(a,b1)和g(c1,d) 与地形是否干涉,并分别找到干涉位置b2和c2(如图5(d)所示). 重复步骤3 直至点a和点d分别回到上料点和下料点.
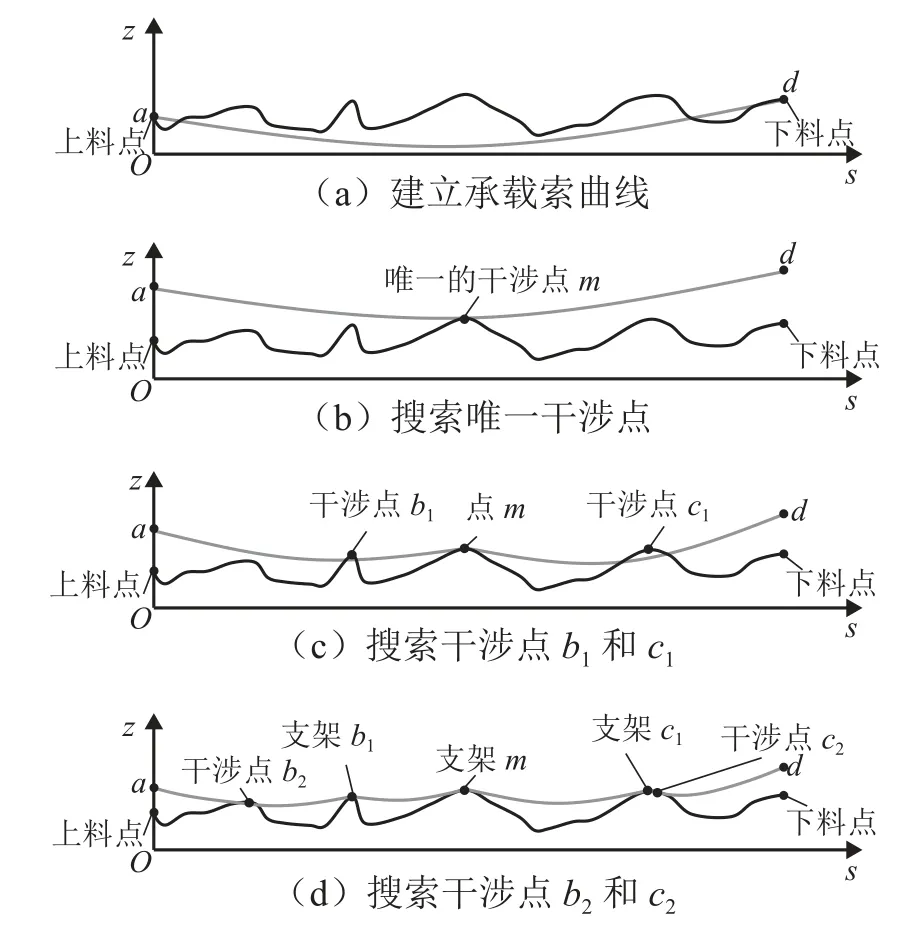
图5 地形自适应法原理示意Fig. 5 Schematic of principle of terrain adaption method
基于地形自适应搜索索道支架位置时,并未限制相邻支架间的距离. 为满足索道相邻支架间的最大跨距不宜大于400 m 的要求,需对跨距过大的支架作进一步处理. 如图6 所示,首先找出索道路径上间距大于400 m 的相邻支架(如图6(a)所示),然后在这一对相邻支架的中点附近的凸包上增加新的支架(如图6(b)所示). 再找出新增支架和两侧相邻支架间的承载索曲线与地形曲线的所有干涉点,在这些干涉点位置增设新的支架(如图6(c)所示). 不断循环以上步骤优化跨距过大的相邻支架,直到所有档距都不大于400 m 且所有承载索曲线与地形之间都不存在干涉点.
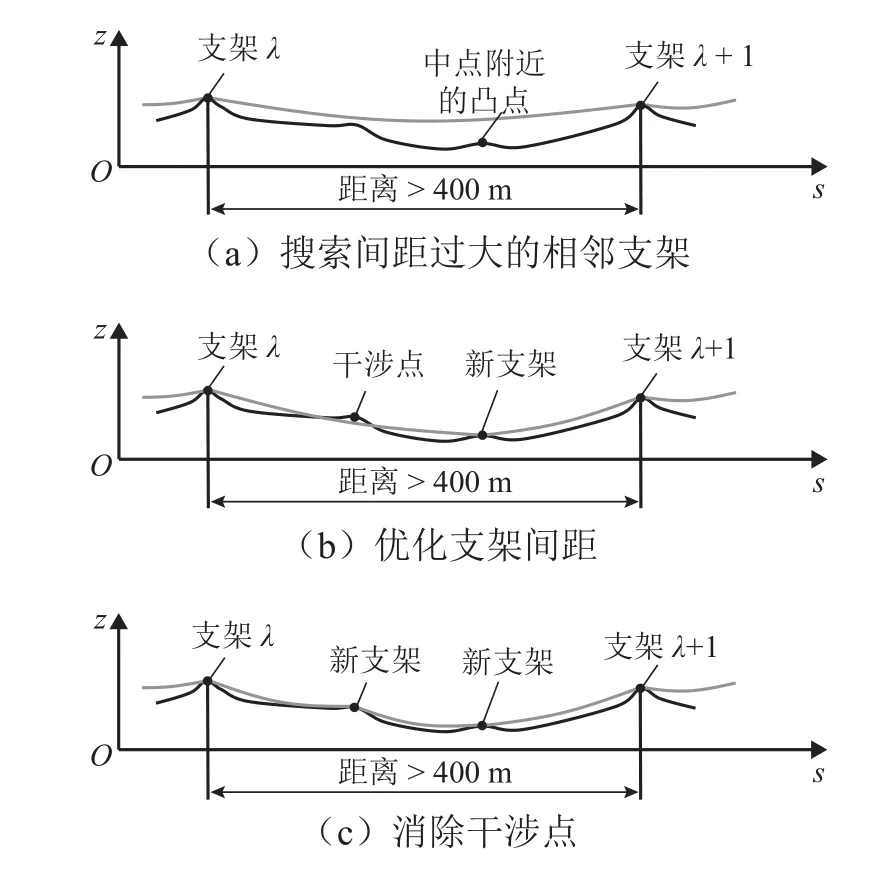
图6 支架间距优化示意Fig. 6 Schematic of trestle spacing optimization
在对跨距大于400 m 的相邻支架进行处理时,也会造成支架数量冗余,因此,地形自适应法也需要使用如图4 所示的方法对冗余支架进行筛除.
2.3 干涉点搜索法
干涉点搜索法以已知的两个相邻支架(例如首次搜索时的上料点和下料点)为起点和终点,建立一条单跨索道承载索曲线,不断在承载索曲线与地形的最大干涉位置添加中间支架,直到承载索曲线不会与地形发生干涉;同时通过对间距大于400 m 的相邻支架进行分段处理,建立满足中间支架搜索原则的货运索道.
如图7 所示,该方法的原理可以通过以下步骤进行解释:
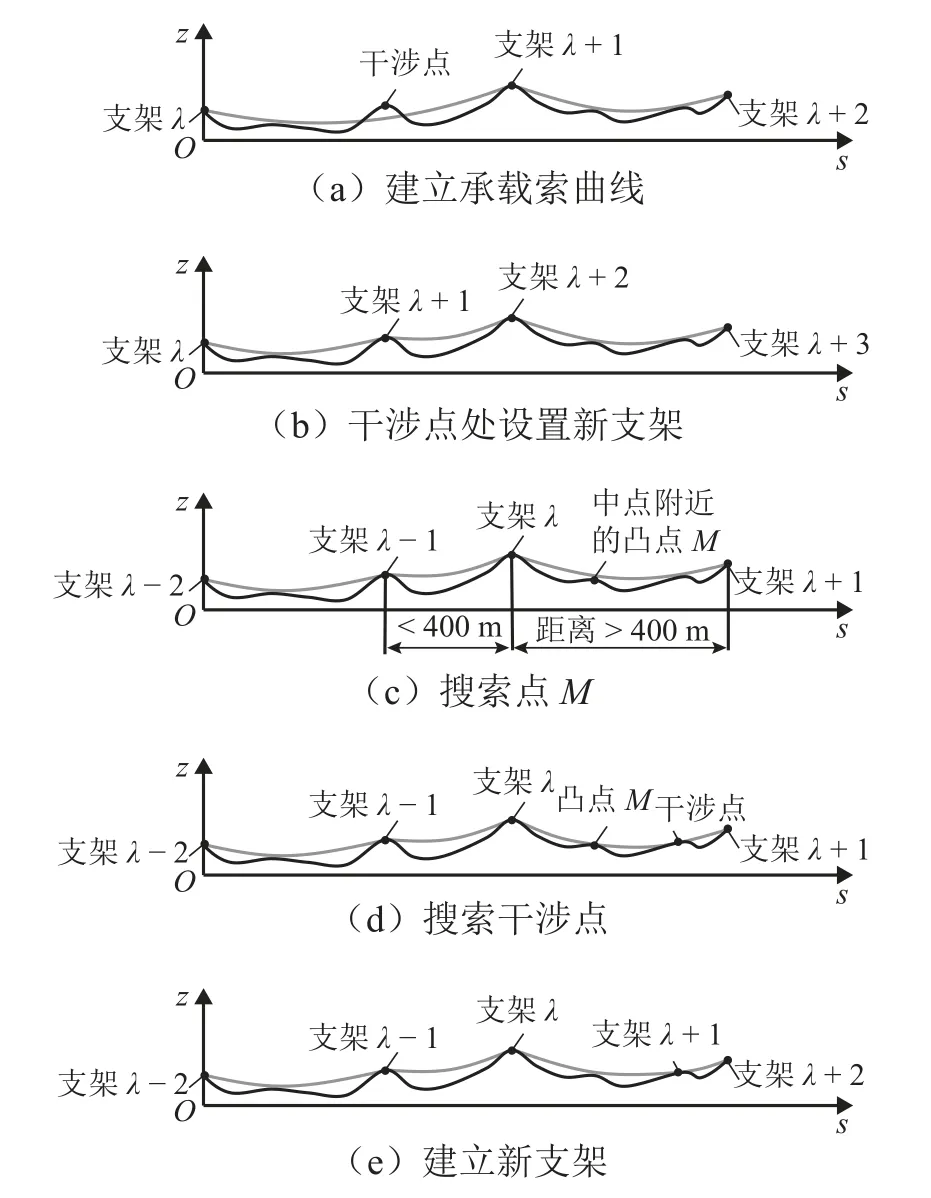
图7 干涉点搜索法原理示意Fig. 7 Schematic of principle of interference-point search method
步骤1在相邻支架λ和支架λ+ 1 之间建立承载索曲线g(λ,λ+1) (如图7(a)所示),判断曲线是否与地形干涉.
步骤2如果g(λ,λ+1) 与地形干涉(如图7(b)所示),在干涉点处设置新的支架,编号为λ+ 1 (并将原编号为λ+ 1 的支架及其后续支架编号顺次增大).
步骤3如果g(λ,λ+1) 与地形不干涉,但支架λ和支架λ+ 1 的间距大于400 m (如图7(c)所示),那么就先找到两个支架的中点附近的凸点M,然后分别在支架λ和M点间以及M点和支架λ+ 1 间建立索道承载索曲线g(λ,M)和g(M,λ+1) ,并分别判断g(λ,M)和g(M,λ+1) 曲线是否与地形干涉.
步骤4如果只有一条承载索曲线与地形干涉(如图7(d)所示),在相应的那个干涉点处设置新的支架,编号为λ+ 1 (并将原编号为λ+ 1 的支架及其后续支架编号顺次增大)(如图7(e)所示);如果两条承载索曲线都与地形干涉,在相应的两个干涉点处设置两个新的支架,分别编号为λ+ 1 和λ+ 2 (并将原编号为λ+ 1 的支架及其后续支架编号顺次增大);如果两条索道都不与地形干涉,则将M点设置为新的支架,编号为λ+ 1 (并将原编号为λ+ 1 的支架及其后续支架编号顺次增大).
步骤5如果g(λ,λ+1) 与地形不干涉,且这两点的间距小于400 m,那么支架λ和支架λ+ 1 之间无需设立中间支架.
步骤6针对所有相邻支架,重复步骤1 ~ 5,直到所有相邻支架间的承载索曲线与地形不干涉,且距离小于400 m.
在对跨距大于400 m 的相邻支架进行分段处理时,也会造成支架数量冗余,因此,干涉点搜索法也需要使用如图4 所示的方法对冗余支架进行筛除.
3 索道支架位置自动搜索算例
3.1 索道支架位置自动搜索方法对比研究
针对西南地区的典型地貌,共建立10 万个索道路径二维地形剖面,典型特征剖面如图8 中黑实线所示. 使用本文所提出的3 种方法对这些二维地形剖面的索道支架位置搜索问题进行求解,求解结果样例如图8 所示. 为了便于观察,在图中分别将由方法2 (地形自适应法)和方法3 (干涉点搜索法)计算得到的支架和承载索曲线在高度方向进行了平移. 在地形剖面1 的计算结果中,仅有方法1 (凸包点遍历法)可以成功提供合理的索道支架位置方案,而方法2 和方法3 搜索的左起第3 个和第4 个支架之间的跨距都小于20 m,不能满足支架位置要求. 在地形剖面2 ~ 4 的计算结果中,3 种方法算得的大部分支架位置基本一致,只有少数支架位置有微小的差异.
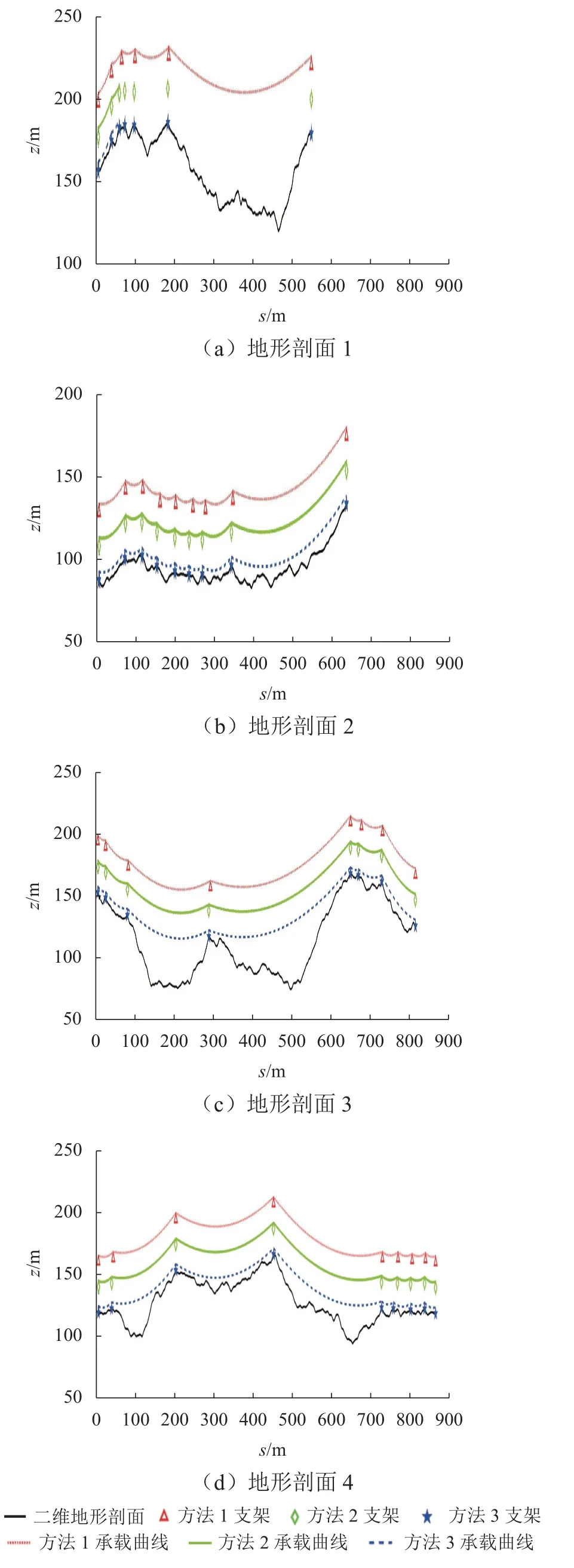
图8 地形剖面支架位置搜索结果样例Fig. 8 Search results for profile examples of trestle position
表1 展示了使用本文提出的3 种方法对这10 万个二维地形剖面算例进行索道支架位置搜索的成功率和计算时间(计算机处理器:英特尔 Core i7-9700 @3.00 GHz 八核,内存为8 GB).
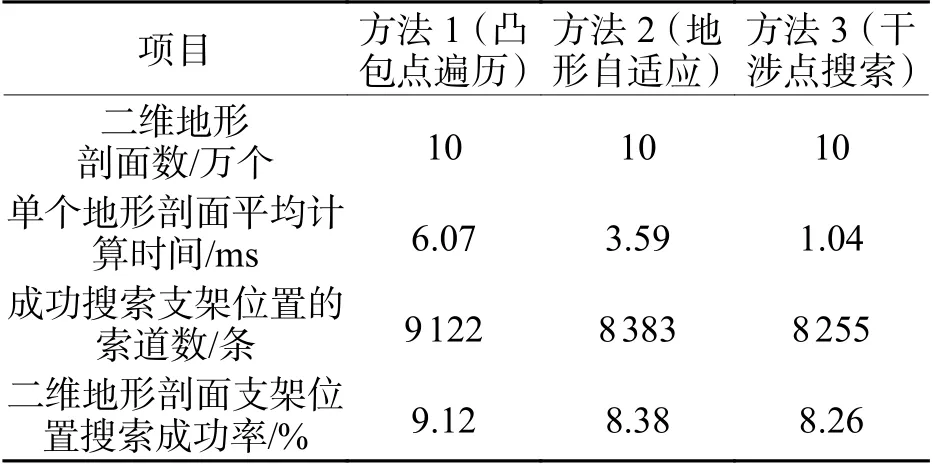
表1 本文提出的3 种方法的计算结果对比Tab. 1 Comparison of results obtained by three proposed methods
通过对比发现:这3 种方法的支架位置搜索成功率差别不大,但单个地形剖面的平均计算时间差异较大. 方法1 的支架位置搜索成功率最高,方法2 次之,方法3 最低;3 种方法的成功率由高到低依次为9.12%、8.38%、8.26%. 方法3 对单个地形剖面进行处理的平均时间最短,仅需1.04 ms;方法2 次之,需3.59 ms;方法1的时间最长,为6.07 ms. 综合对比之后发现:虽然方法3 的支架位置搜索成功率略低于另外两种方法,但其计算速度是方法2 的3.5 倍,是方法1 的5.8 倍. 因为3 种方法的成功率并没有明显的差异,所以在实际工程应用中,推荐使用支架位置搜索速度最快的方法3.
3.2 各因素对支架位置搜索成功率的影响
通过对这10 万个算例的计算结果进行统计分析发现,地形剖面的水平长度、最大高度差和梯度的均方根都对支架位置搜索成功率有较大的影响,图9(a) ~ (c)分别展示了这3 个因素对支架位置搜索成功率的影响. 如图9(a)所示,随着地形剖面的水平长度由200 m 增加到约1 600 m,3 种方法的支架位置搜索成功率基本保持一致,均由50%逐渐降低到1%以下. 如图9(b)所示,随着地形剖面的最大高度差由0 增加到约240 m,3 种方法的支架位置搜索成功率基本保持一致,均由40%逐渐降低到1%以下. 如图9(c)所示,随着地形剖面的梯度的均方根由0.2 增加到约0.8,3 种方法的支架位置搜索成功率基本保持一致,均由40%逐渐降低到5%左右.
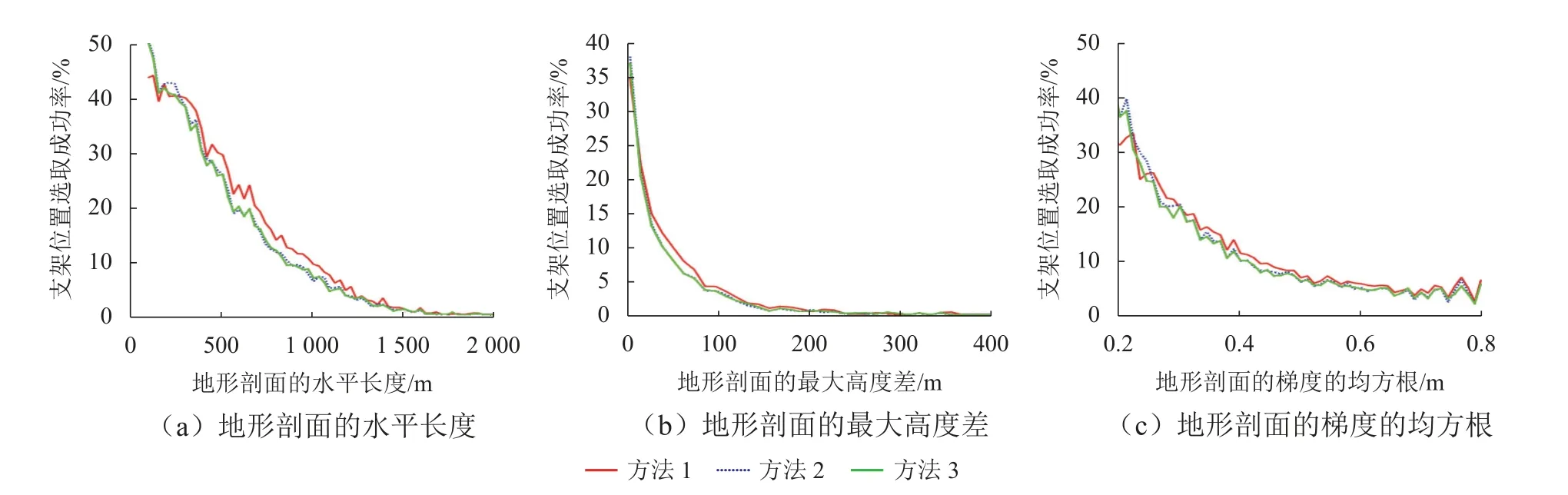
图9 各因素对支架位置搜索成功率的影响Fig. 9 Influence of various factors on success rate of trestle position search
4 结 论
本文提出并对比研究了3 种索道支架位置自动搜索方法:凸包点遍历法、地形自适应法和干涉点搜索法. 使用这3 种方法对10 万个二维地形剖面算例进行索道支架位置搜索,通过对结果进行统计分析发现:凸包点遍历法的求解速度最慢,但求解成功率最高;干涉点搜索法的求解速度最快,其求解成功率最低. 3 种方法都能够在提供的二维地形剖面上自动搜索满足要求的索道支架位置,为输电线路货运索道路径自动化规划提供有效支持,进而为降低输电线路专用索道的运输成本和提高运输效率提供有力保障.
为进一步降低输电线路施工物料的运输成本和提高运输效率,后续将以本文提出的3 种索道支架位置自动搜索方法为基础,开展输电线路货运索道路径自动规划技术研究;同时结合货运索道设计计算及选型方法研究,实现货运索道的路径规划、设计计算与部件选型一体化技术研究;在此基础上,结合公路、水路等运输路径规划方法,实现输电线路施工物料运输路径的协同规划.
