北京三号卫星自主任务规划设计与在轨应用
2022-11-02陈雄姿田帅虎
陈雄姿,杨 芳,谢 松,蔡 熙,田帅虎,郭 琪,黄 敏
航天东方红卫星有限公司,北京 100094
0 引 言
相比于以地面测控为主要手段的卫星传统运行管理方式,星上自主任务规划具有充分发挥卫星在轨使用效能、提高卫星紧急任务响应能力、大幅减少对地面测控的依赖和支持多星自主协同配合执行对地观测任务等诸多优势[1-3],将成为未来智能化卫星/星群的一项标配技术.
近些年国内外相继开展了卫星自主任务规划技术的研究,随着规划模型和算法的日趋成熟,自主任务规划技术在工程实践与应用上的案例也越来越多.国外方面,1999年NASA研制了首颗自主任务运行卫星DS-1[4],它基于远程智能体技术,采用25MHz主频的RAD 6000处理器在几个小时内完成了几天的任务规划,成功进行了自主规划调度技术的在轨演示;2001年EAS发射了专门用于验证星上自主技术优越性与可行性的PROBA-1卫星[5],它可以接收观测目标的经纬度坐标执行短期规划,自动计算观测时间并生成指令序列;2004年JPL开发的自主任务规划软件系统ASE在EO-1卫星上取得巨大成功[6],规划效能相比DS-1提高了20倍以上;2008年法国航天局研发的星上自主系统GTATA在敏捷对地观测卫星Pleiades上进行了实验[7],该系统考虑的规划约束条件包括:时间窗口、卫星姿态机动能力、星上能源和存储空间、任务优先级、观测任务的观测角度等;2015年德国空间中心开发的航天器自主任务规划在轨验证系统VAMOS在Biros卫星上进行了实验验证[8-9],它能够实时监测与管理星上存储资源状态,处理地面上注的高优先级任务,还可快速规划由图像处理过程中发现的新需求,实现自主发现、自主监视目标等功能.国内方面,为了提升卫星的好用易用性,中国空间技术研究院航天东方红公司的CAST3000卫星平台设计了星上指令自主解译系统[10],卫星在接收到地面上注的元任务指令块后,基于星上装订的指令模板动态生成分系统指令序列,该系统在2015年发射的高分九号卫星上完成验证并应用;中国空间技术研究院总体部研制的高分三号卫星同样设计了9种自主任务规划指令模板[11],并于2016年开展了在轨验证;上海航天技术研究院2015年发射的浦江一号卫星设计了基于单星电磁信号监测载荷与光学成像载荷综合应用的自主任务规划[12],解决了电磁信号检测与光学成像高效协同的问题.由此可见,上述案例中实现的自主任务规划各具特点,差异性较为明显,主要是由卫星任务本身的多样性决定的;国内相关研究起步较晚,高分九号和高分三号尚属于“地面规划+星上解译”的半自主规划,浦江一号卫星实现了成像任务的完全自主规划,但它非敏捷卫星,也没有考虑数传任务规划,任务调度求解相对简单.
相比于上述卫星,北京三号卫星[13]是国内第一颗具有完全星上自主任务规划能力的敏捷光学遥感卫星,于2021年6月11日成功发射,运行在轨道高度约500 km的太阳同步轨道,星上配置了高分辨率双相机组合体,可获取星下点地面像元分辨率0.5 m/多光谱2 m的高精度图像,星下点幅宽优于22 km.它具有超高敏捷、超高稳像和超高精度成像的“三超”特征,实现了单斜条带、多斜条带拼接、斜条带拼幅等多种主动推扫成像模式,是国际上第二款具备沿任意航迹成像能力的遥感卫星.北京三号卫星的自主任务规划支持成像任务和数传任务的一体化规划,用户仅需上注期望拍摄任务的地理位置和可用数传窗口,星上即可在短短数分钟内完成全天的任务规划.本文介绍北京三号卫星自主任务规划的设计及在轨应用情况.
1 卫星工作模式
1.1 运行模式
北京三号卫星的运行模式如图1所示,卫星在南北两极上空对日定向充电,中低纬度阳照区为对地成像区间,地影区保持对地定向.
D点为出地影点,卫星到D点时需要转对日定向,Df点完成姿态机动;C点为进地影点,卫星到C点时转对地定向,Cf点完成姿态机动;Af点为第一个观测/数传任务开始时间,为了在Af点相机指向目标,卫星需要在A点开始姿态机动;B点为南纬60度点,卫星过B点后转为对日定向姿态,到Bf点时姿态机动完成.在[A,B]区间范围内,当两个任务间隔大于5 min时,卫星转为对日定向.

图1 北京三号卫星运行模式Fig.1 Operating mode of Beijing-3 satellite
1.2 成像模式
北京三号卫星搭载两台支持正反推扫的TDI线阵相机,具有25(°)/10 s的超敏捷机动能力,同时配置了实现载荷稳像控制的“主动指向超静平台”.如图2所示,它不仅能够支持同轨多点目标成像、同轨多条带拼接成像、同轨两/三视立体成像、动态监视成像等传统敏捷成像模式,还能够实现多种沿任意航迹的主动推扫成像模式[14],包括:单斜条带成像、斜条带拼接成像和斜条带拼幅成像等.

图2 北京三号卫星成像模式Fig.2 Imaging modes of Beijing-3 satellite
(1)单斜条带成像
单斜条带成像指的是对与星下点轨迹成任意夹角的斜条带进行成像,斜条带是由地球表面两点确定的一段过地心的大圆弧(劣弧),斜条带宽度为相机幅宽.
(2)斜条带拼接成像
通过卫星的快速姿态机动可实现多个斜条带首尾相接成像,即斜条带拼接成像,适用于边境线、河流、道路等狭长弯曲目标的高效覆盖.
(3)斜条带拼幅成像
斜条带拼幅成像是利用多个斜条带进行幅宽拼接,北京三号支持垂轨拼幅成像和正南正北拼幅成像.前者斜条带与星下线垂直,适用于东西方向幅宽较大的区域目标的覆盖;后者斜条带与地理经线平行,可满足用户特定的图像获取需求.两种拼幅方式均可采用正反推扫结合,提升卫星的成像能力.
1.3 数传工作模式
北京三号卫星的数传工作模式有五种,分别是记录模式、近实传模式、回放模式、智能处理模式和固存擦除模式.其中,记录模式和近实传模式可选全色2.5∶1和4∶1两种压缩比,回放模式支持按文件号回放和按时间回放,固存擦除模式支持序号擦除和全部擦除.
对地数据传输速率为900 Mb/s,使用两副点波束数传天线,分别位于卫星底板左右两侧,传数时被选用的天线通过二维转动实现对地面站的跟踪.
2 自主任务规划总体设计
2.1 卫星操控方式
基于星上自主任务规划,用户操控北京三号卫星不用再涉及任何卫星指令层的操作,只需专注于在地图上挑选期望观测的目标.卫星在轨操控期间的信息流如图3所示.
在一个任务规划周期内,用户将所有待观测目标的经纬高位置和可用数传窗口等原始任务信息上注到星上,运行在平台综合电子协处理模块的自主任务规划软件接收完这些信息后,一次性完成全部观测任务和数传任务的优化编排,并将生成的元任务指令块序列发送给星务中心计算机,星务应用软件根据元任务指令块中指定的发送时间将元任务指令块拆分为分系统程控块并分发给星务、控制、相机和数传分系统执行.同时,自主任务规划软件通过遥测不断向地面滚动播报星上安排的观测计划和数传计划.
当地面需要安排紧急任务时,同样只需要上注紧急原始任务信息,由星上自主完成任务的重规划.区别主要在于需要先通知星务删除与重规划时间区间交叠的全部旧元任务指令块,再输出重规划生成的新元任务指令块.

图3 北京三号卫星在轨操控信息流Fig.3 Information flow of Beijing-3 satellite operation
2.2 自主任务规划核心功能
(1)支持观测任务和数传任务的一体化规划,观测任务的类型涵盖全部传统敏捷成像模式和动中成像模式,还包括3种辐射定标模式(偏航±90°和180°),支持多种成像模式的组合交叉;数传任务同样包含全部5种工作模式.
(2)支持接收地面紧急任务进行观测任务和数传任务的重规划,重规划要求将未执行的观测任务和数传任务与紧急任务一起全部重新编排,紧急任务优先编排.
(3)能够自主动态管理载荷数据存储状态,支持小固存记录、按时间回放、文件重传和文件擦除任务的规划.
(4)任务优化编排需综合考虑固存容量、星上能源等星上资源约束条件以及姿态机动能力、载荷模式切换时间等卫星使用约束条件,充分发挥卫星的效能.
2.3 关键技术指标
(1)最长任务规划周期:24 h.
(2)单个规划周期可规划最大观测目标个数:300个.
(3)单个规划周期可规划最大数传窗口数量:30个.
(4)单圈可编排最大观测任务数量:50个.
(5)各分系统动作执行时间精度:0.1 s.
(6)一次性完成24小时规划窗口300个目标规划的最大耗时:2 min(被动点目标)和12 min(主动线目标).
3 协处理模块硬件设计
自主任务规划涉及复杂的轨道计算、成像姿态计算、观测窗口迭代搜索等,具有计算量大且浮点运算多的特点,为最大化提升规划运算的速度,在平台综合电子中为其设计了专用的协处理器模块.
图4给出了协处理模块的原理设计框图,它由1个 DSP处理器、1片PROM、1片Flash、1个FPGA和2片SRAM组成.运行自主任务规划软件的国产DSP处理器具有960MFLOPS强浮点运算能力和抗辐照能力,设置的工作频率为120 MHz.PROM中运行协处理器系统软件,负责引导和重构任务规划软件.协处理模块与星务中心计算机之间通过RS422异步串口连接,串口数据的收发由FPGA实现,FPGA同时负责外部SRAM的EDAC.

图4 协处理器原理设计框图Fig.4 System composition of coprocessor
4 规划软件数据接口设计
自主任务规划软件与星务软件之间采用主从式的通信方式,数据交互关系如图5所示.交互内容可分为两大类型:一种是星务发送给任务规划的间接指令、地面上注数据块和卫星实时状态数据块,任务规划返回给星务接收应答;另一种是星务发送遥测数据轮询、元任务指令块轮询和元任务指令删除块轮询,任务规划返回相应的数据块给星务.其中,最为重要的是地面上注的原始任务数据块和规划输出的元任务指令块与元任务指令删除块.

图5 自主任务规划与星务之间的数据交互关系Fig.5 Data interaction between autonomous mission planning and OBDH
4.1 输入原始任务数据块
根据自主任务规划的功能需求,设计了6种地面上注的原始任务信息数据块,分别是规划窗口数据块、观测任务数据块、数传窗口数据块、按时间回放数据块、文件重传数据块和文件擦除数据块.其中,观测任务按目标类型和属性差异又分为点目标、线目标、区域目标和智能处理目标4种数据块.数传窗口也可细分为窗口注入和窗口删除,后者仅用于紧急重规划时删除原有普通规划上注的数传窗口.各种数据块包含的参数设计如表1所示.
4.2 输出元任务指令块
北京三号卫星实现了整星的高精度时统,不再使用传统整星层级的指令模板,星务、控制、相机和数传4个分系统都各自管理和维护着分系统层级的指令模板,星务只分发自主任务规划输出的元任务指令块中包含的各个分系统的程控数据块.元任务指令块的格式和内容设计如表2所示.
为了尽可能的减少元任务块的个数并将属于同一个任务的分系统动作同步发出,将4个分系统的程控块集中编排到了一个元任务指令块中.执行元任务指令块时,星务先根据“分系统程控块标识”拆解出有效的分系统程控块,然后将它们在指定的“元任务块发送时间”一起分发给所属分系统,各分系统再解析程控块中的动作类型、动作执行时间和动作参数等信息,使用指令模板生成分系统的指令序列并执行.
这种设计的优点在于各分系统动作可以独立并行的执行,分系统间的协同与配合全部由任务规划安排的动作执行时间来保证,不仅可以有效缩短任务执行完成所需的时间,还降低了各分系统间非必要的指令耦合和星务指令管理的压力.
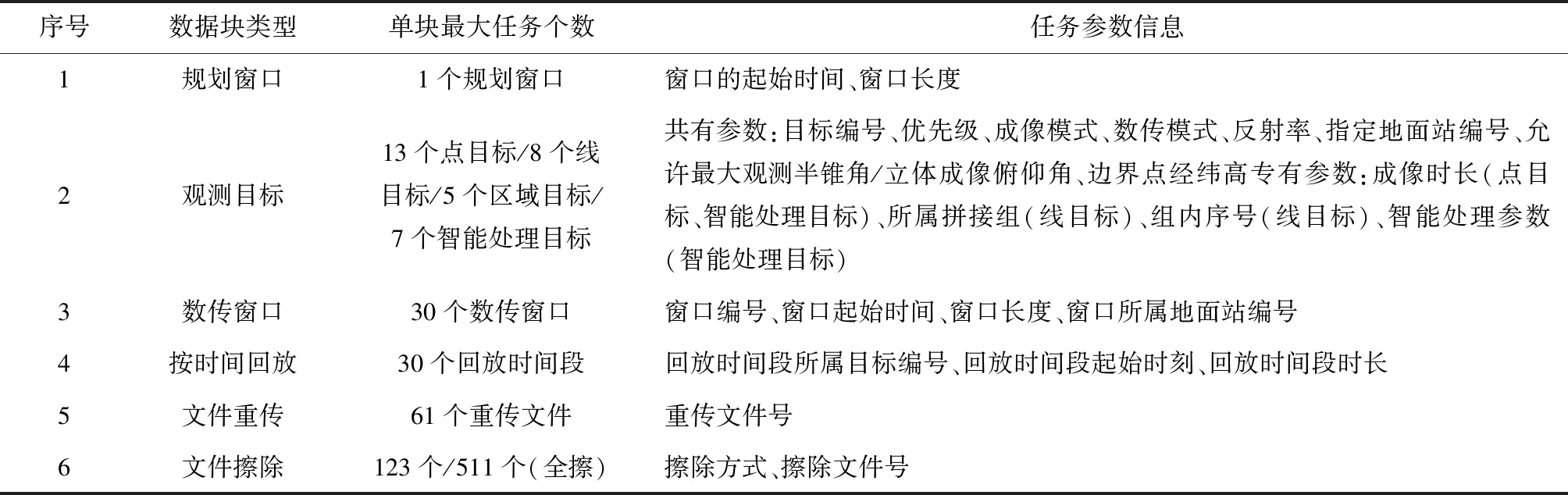
表1 输入原始任务数据块信息Tab.1 Injected original task data block information
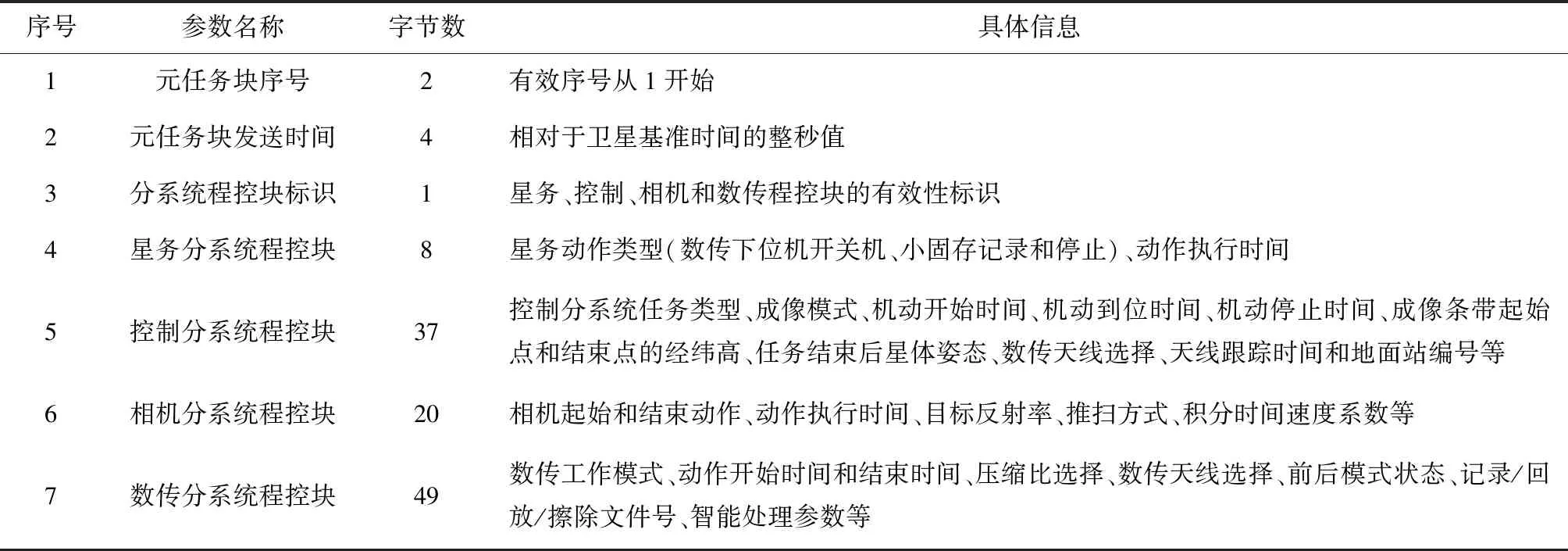
表2 输出元任务指令块信息Tab.2 Generated meta-task command block information
4.3 输出元任务指令删除块
紧急任务重规划时,在发送重规划生成的新元任务指令块之前,需要先输出一个元任务指令删除块,让星务将前面规划未执行且与重规划周期有交叠的元任务指令块删除,避免造成指令冲突.元任务指令删除块给出了待删除元任务指令块发送时间的区间范围.
4.4 上注数据量比较
表3给出了北京三号多种典型任务场景下星上规划和地面规划地面上注数据量的对比情况.其中,地面规划上注按一个数据块(249字节)包含两个元任务指令块(121字节)统计,由于数传下位机开机需要单独成块以及小固存记录等辅线任务需要额外上注,实际地面规划上注量要大于给定值;星上规划上注数据量包含了1个规划周期数据块和1个轨道数据块,是准确值.可以看出,各场景星上规划上注数据量均显著减少,当点目标和大区域目标较多时,星上规划上注量可降至地面规划上注量的十分之一.
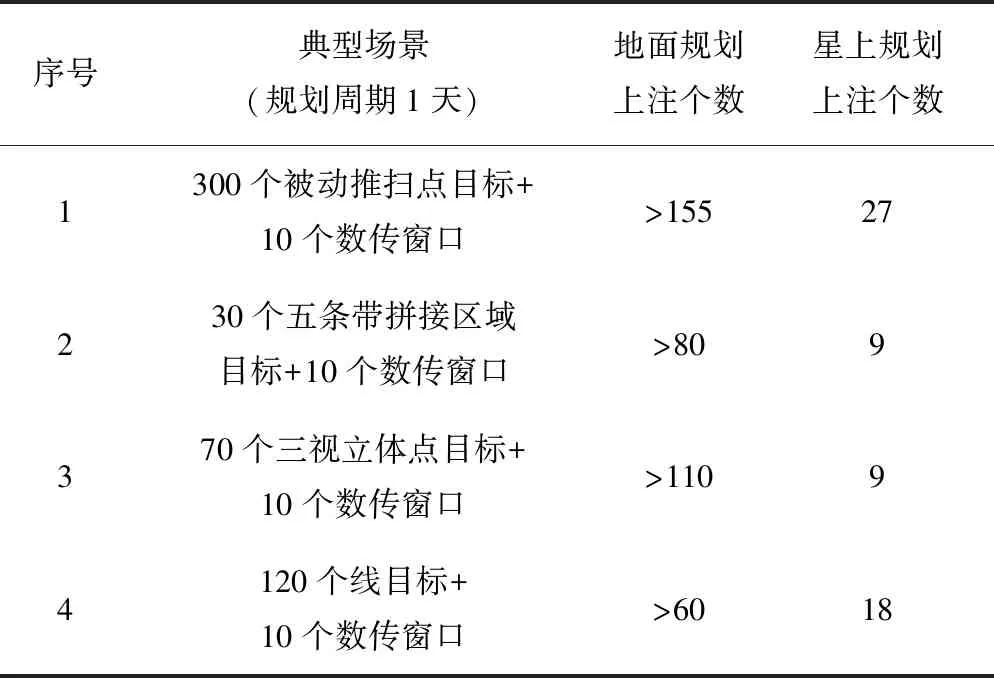
表3 两种规划方式上注数据量比较Tab.3 Comparison of injection data between the two planning modes
5 规划软件功能模块设计
如图6所示,自主任务规划软件主要由5个大的功能模块组成,分别是运行管理模块、轨道计算模块、任务预处理模块、智能任务规划模块以及动作序列与元任务块生成模块.
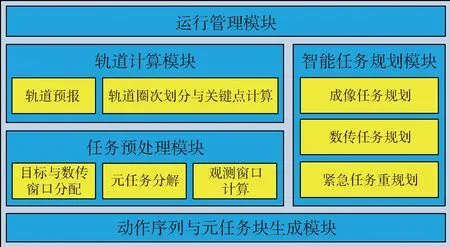
图6 自主任务规划软件功能模块Fig.6 Function Module of autonomous mission planning program
5.1 运行管理模块
该模块主要负责任务规划软件运行流程的管理和外部数据交互,具体包括:串口通信和Flash读写等硬件操作、软件运行状态切换控制、原始任务数据接收状态管理、任务数据存储管理、地面上注指令和数据块的处理、遥测更新以及软件维护等.
5.2 轨道计算模块
任务规划解决的是卫星与地面上的观测目标以及数传站之间的时空关系问题,卫星轨道预报的准确性直接影响规划结果的正确性.轨道计算模块负责基于星载GPS提供的实时轨道参数或地面上注的轨道根数,对卫星未来规划周期内的位置、速度进行外推,作为计算目标观测时间和卫星姿态的依据.考虑到观测任务调度在卫星的各个轨道圈之间具有较好的独立性,同时为了有效减少计算量,星上规划采用单个轨道圈作为最小的规划时间单元.因此,轨道计算模块还需将预报获得的轨道进行圈次划分,并计算出B、C、D等关键点对应时刻.
5.3 任务预处理模块
在执行任务调度之前,需要先将任务进行预处理,主要包括3个方面:首先,根据目标的地理位置、数传窗口时间与卫星飞行轨道之间的时空关系将目标和数传窗口合理的分配到对应的轨道圈次;然后,基于目标的类型(点目标、区域目标、线目标)、成像模式、相机幅宽以及预报的轨道进行元任务分解,得到覆盖观测目标的成像条带;最后,结合目标允许的最大观测半锥角、卫星的姿态机动能力以及目标的元任务分解结果,计算出目标的可供使用的观测窗口,作为任务调度的输入.
5.4 智能任务规划模块
智能任务规划模块主要包括成像任务规划、数传任务规划、紧急任务重规划3个部分.
(1)成像任务规划
当前敏捷卫星对地成像任务规划算法理论研究成果[15-18]较多,大致可分为确定性算法、启发式算法和搜索算法三类,这些算法在不同的应用场景下各有优劣.对于星上自主任务规划,要求规划算法具有效率高、开销小和稳定收敛的特点.为了尽可能的多拍目标,同时最大程度的提升成像质量,北京三号卫星采用了“及早观测搜索+最佳窗口平移+固存约束检查”的三阶段成像任务优化调度策略.
第一阶段:采用深度优先的树搜索技术[19-20]搜索观测收益最大的最优成像目标序列,在搜索过程中利用冲突消解规则、收益预测规则对搜索树剪枝,以缩小搜索空间、加快搜索速度.其中,定义观测收益为观测目标序列的优先级累加和,观测目标的优先级数值越大表示优先级越高;另外,冲突消解规则是指相邻两个任务均安排时若无法正常切换,即存在任务冲突时,则舍弃安排观测后一个任务对应的分支;收益预测规则是指若当前树节点累计收益与后续所有节点假定全部安排观测时的收益的总收益小于等于前面已经获得的最优观测序列的收益,则直接裁剪当前节点后续搜索分支.整个搜索过程的大致步骤如下:1)依据目标的可用观测窗口进行排序,构造搜索树;2)采用深度优先搜索算法遍历搜索树,用冲突消解规则、收益预测规则裁剪搜索树;3)按择优规则比较新获取成像目标序列与已获取最优成像目标序列,更新最优序列;4)搜索完成,确定最优成像目标序列.搜索过程中,任务是否能安排需要考虑任务间的姿态切换时间、载荷工作模式切换时间以及数传天线转动时间(近实传任务).
第二阶段:第一阶段搜索得到的是满足观测目标指定最大观测半锥角要求的观测收益最大的成像序列,每一个目标安排的成像窗口都是它允许的最早成像窗口.因此,第二阶段在不影响前后安排目标的前提下,将当前目标的观测时间向后平移到最靠近最佳观测窗口的时刻,使其成像质量最佳,最佳成像窗口可选为成像的起始和结束时刻卫星观测半锥角相等的观测窗口.为了确保平移不影响任务的可执行性,从编排序列的最后一个目标开始倒序逐个平移,每次基于后一个任务向后平移的结果计算当前任务可向后平移的时间区间,直至完成观测序列中第一个目标的平移.
第三阶段:所有轨道圈均完成前两个阶段成像任务调度之后,执行固存使用约束检查.通过计算积分时间估算图像大小,对剩余可用文件号和可用固存容量使用贪婪算法获得收益最大的观测序列,删除由于固存资源限制无法安排的任务.
(2)数传任务规划
数传任务规划主要包括三个方面:1)基于地面上注的文件擦除要求,安排固存擦除任务;2)定期安排小固存记录任务;3)基于可用数传窗口、固存中文件号的状态、地面上注的重传文件和按时间回放要求等安排回放任务.
设计的文件下传优先级次序为:当前规划周期的紧急任务文件、当前规划周期两档最高优先级的文件、按时间回放、之前规划周期未下传的文件(含重传文件)、当前规划周期两档最高优先级以外的文件.该设计既可以确保用户能及早获取高时效性要求的新观测数据,又能保证所有文件都能及时下传,避免出现未下传旧文件积压的情况.基于上述回放顺序,在每一个数传窗口采用贪婪算法最大化数传窗口的使用率,完成回放任务的编排.
(3)紧急任务重规划
紧急任务重规划在地面上注紧急任务之后启动,首先确定普通任务的删除区间,然后将未执行的观测任务和数传任务与紧急任务一起全部重新编排,与普通的成像规划和数传规划流程基本相同,区别主要在于:1)任务冲突时紧急任务会最优先编排;2)需要在执行紧急规划前将之前安排的未执行的普通任务对应的文件号状态恢复到未执行的状态;3)输出重规划元任务指令块之前先输出一个元任务指令删除块,通知星务删除位于重规划周期内的旧元任务指令块.
5.5 动作序列与元任务块生成模块
该模块负责根据成像任务和数传任务的规划结果,生成各个分系统的动作序列,然后再将各个任务的分系统动作组合生成表2所示的元任务指令块和重规划的元任务指令删除块.
6 在轨应用情况
北京三号卫星自主任务规划的功能和技术指标在地面研制阶段经过了充分的测试验证.2021年6月11日卫星发射入轨,在完成相机调焦和姿控调参之后,6月15日至17日基于星上自主任务规划技术顺利完成了载荷工作模式测试和成像能力指标测试.测试项目覆盖了全部的成像模式和数传模式,星上累计规划观测目标65个(成像条带97个),数据回放窗口8个(用户当时仅开放北京站),接收地面上注的原始任务数据块合计只有24个,规划平均用时约30 s,输出元任务指令块147个,包含各分系统程控指令块一共360个,所有指令各分系统均正确执行;地面接收图像数据总计约3Tbit,被动成像和动中成像拍摄的图像均景物层次丰富、纹理清晰、色彩分明,条带搭接控制合理,目标区域覆盖准确,自主任务规划技术在轨验证成功.
图7是在轨测试期间星上任务规划安排获取的典型图像示例.其中,图7(a)是单轨连续40个城市点目标被动推扫成像的缩略图,每个城市成像3 s;图7(b)是通过4个斜条带拼接方式对长江西南段成像的缩略图,图像总长度约360 km,整个拍摄过程用时92 s;图7(c)是使用垂轨斜条带拼幅方式对旧金山成像的缩略图,规划划分了3个正反扫(2正扫+1反扫)的条带,每个条带成像9 s,成像过程中卫星滚动和俯仰角速度同时达到0.8(°)/s,偏航角速度达到0.3(°)/s,整个拍摄过程用时41.7 s.
截止到2022年6月21日,用户已经常态化使用星上自主任务规划执行业务订单任务满一年,卫星累计执行观测成像和数据回放元任务10258个.协处理模块工作状态良好,星上规划软件运行稳定,规划结果准确协调,在轨表现优异.
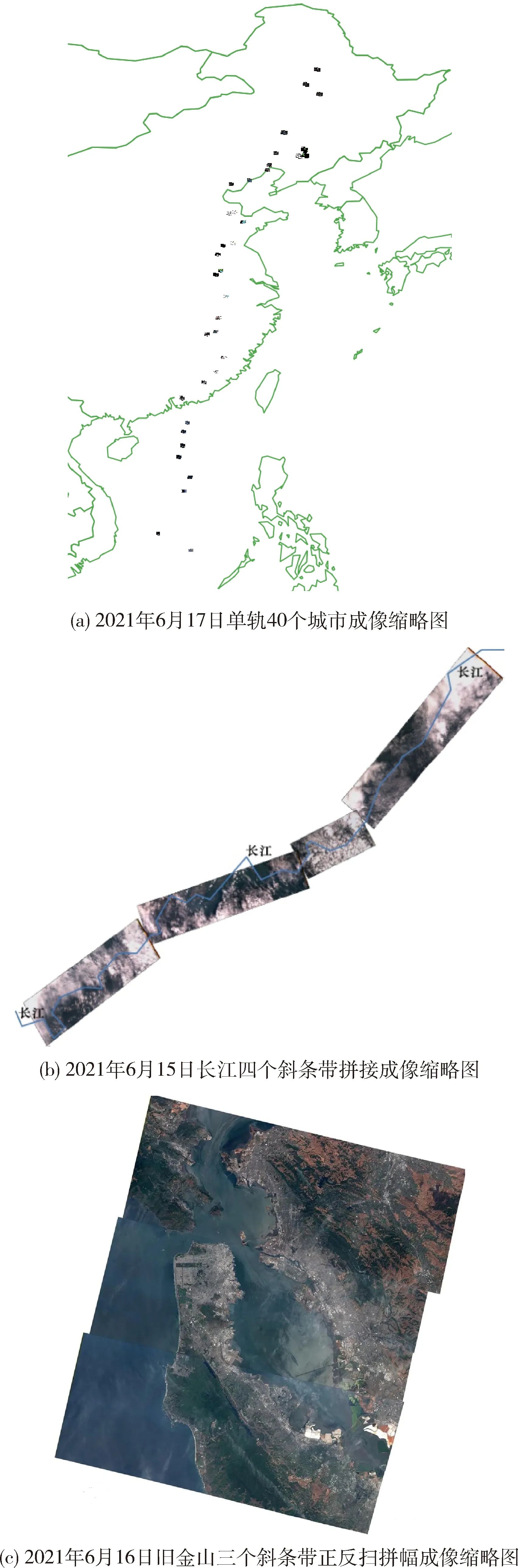
图7 飞控测试期间获取的典型图像示例Fig.7 Representative imaging during in-orbit test of Beijing-3 satellite
7 结 论
本文对北京三号卫星自主任务规划的设计和在轨应用情况进行了详细介绍.北京三号卫星自主任务规划具有以下特点:1)实现了敏捷光学遥感卫星成像任务和数传任务的星上完全自主一体化规划和重规划,用户安排任务只需上注原始任务信息,上注数据量在任务较多时可降低为地面规划上注量的十分之一;2)支持传统敏捷成像任务和单斜条带、斜条带拼接、斜条带拼幅等动中成像任务的规划,成像任务规划采用了“及早观测搜索+最佳窗口平移+固存约束检查”的三阶段任务调度策略,在最大化观测目标数量的基础上将成像质量调整到最优;3)实现了载荷数据存储状态的自主动态管理和偏航定标、小固存记录等辅线任务的规划,全方位解放用户;4)设计了任务规划专用的协处理器硬件系统,可在数分钟内快速的完成全天任务的规划,用户在上注原始任务的测控弧段就可以获取到规划结果.自主任务规划技术大幅提升了北京三号卫星的好用易用性和智能化水平,在轨应用一年期间其稳定优异的表现证明了其设计的合理性和有效性,可为敏捷对地遥感卫星自主任务规划设计提供参考.
