基于智能聚类的遥感卫星成像任务自主聚合方法
2022-11-02王云鹏
张 聪,袁 利,王云鹏,李 勇
1.北京控制工程研究所,北京 100094
2.中国空间技术研究院,北京 100094
3.空间智能控制技术重点实验室,北京100094
0 引 言
近年来,天基遥感需求迅速增长,遥感卫星承担任务日趋丰富,为充分发挥卫星效益,需对待执行任务进行统筹规划.由于时延的影响,传统星地大回路的任务规划方式,难以发挥天基遥感资源的最大效益,在轨自主任务规划成为发展的主流方向[1-17].文献[1]建立了敏捷遥感卫星自主任务规划问题模型,提出了一种基于启发式滚动规划的敏捷遥感卫星自主任务规划方法.文献[2]提出了一种基于专家系统的低轨光学遥感卫星在轨自主任务规划及实现方法.文献[3]提出了一种面向遥感卫星的新型星上自主任务规划框架,基于该框架可实现满足多种应用模式的星载自主任务规划样机及地面集成开发与验证环境.文献[4]提出了一种基于K-NN算法的遥感卫星自主任务规划方法,该方法可根据各种约束条件下的自主任务规划模型、卫星到达的动态性及气象环境因素对系统自主任务规划任务的影响,给出一种面向动态环境的遥感卫星自主任务规划模式.文献[5]提出了用于航天器任务规划与调度的软件系统(ASPEN),将用户提出的高级任务目标自动转换为航天器系统能够识别的一组可执行命令.文献[6]提出了用于航天器星上自主任务规划与调度的软件系统(CASPER),该系统可在任务执行过程中持续监控航天器的状态、环境数据以及新任务的输入,对已规划方案进行迭代更新,实现了在轨动态任务规划.
具有自主任务规划能力的遥感卫星还需要面对多源复杂任务输入问题,任务来源包括来自多终端用户提出的成像任务、地面应急注入的高优先级成像任务、多星协同场景下前序卫星通过星间链路发来的协同引导任务以及星上感知决策模块自主发现并生成的成像任务等.因为以上多源成像任务未经过地面系统的统筹处理,所以存在局部区域待观测的地面目标点分布密集的特征.如果按照文献[1-17]介绍的常规自主任务规划方法将这些地面目标点均作为独立的待观测目标考虑,那么在地面目标点分布较为密集的区域,遥感卫星将会在频繁姿态机动上消耗大量时间,影响任务执行效益.
针对以上问题,目前相关研究[18-19]所提出的方法均是基于卫星观测扫描方向平行于卫星飞行方向,卫星成像时刻为被动扫描模型,即卫星俯仰、滚转姿态保持不变,且聚合后规划结果输出仅是条带扫描形式.本文从工程化应用的角度出发,考虑到敏捷遥感卫星所具备的动中成像能力、条带拼幅区域成像能力,提出了一种基于智能聚类的遥感卫星成像任务自主聚合方法,在遥感卫星收到多源输入的成像任务并完成当前规划窗口的任务筛选后,通过局部规划窗口范围内任务密集程度识别、密集任务子集合智能划分、密集子任务集合地面目标点的外接多边形计算、成像任务聚合类型判定、多条带观测模式任务生成及推扫条带划分、区域观测模式任务生成及推扫条带划分,将原本独立的密集地面点目标自主分类合并为多条带观测任务或者区域观测任务.其中密集任务子集合智能划分采用基于密度的智能聚类方法,通过样本地理空间分布的紧密程度确定密集子任务集合.聚合完成的任务为星上自主任务规划算法提供更加优化的任务输入,充分发挥敏捷遥感卫星所具备的复杂路径姿态机动能力,从而大幅提升遥感卫星单位时间内的任务执行效能.
1 问题描述与定义
考虑运行在地球圆轨道上的对地遥感卫星,轨道高度为H,成像载荷幅宽为b.默认姿态下,卫星本体系与卫星轨道系重合,轨道系定义如下:
1)Z轴:由卫星中心指向地心;
2)X轴:指向卫星运动方向,与Z轴垂直;
3)Y轴:与X和Z轴组成右手系.
载荷相机安装在本体-Z轴方向,默认姿态下指向星下点.遥感卫星除了对星下点进行成像外,也可以通过姿态机动对星下点附件区域进行成像,成像的最大滚动角和俯仰角分别为φ和θ.
该卫星的待成像目标集为S={si,i=1,2,…,N},其中N是任务的数量,si=(longi,lati,alti)为地面点目标i对应的经度longi、纬度lati、高程信息alti.目标集合中可能存在密集点目标,对密集点目标成像存在同一区域多次重复成像的问题,严重影响卫星效益.将区域密集点目标聚合为多条带或面目标进行统一规划成像,可大幅提升卫星效益,如图1所示.

图1 任务聚合场景示意Fig.1 The scenario of imaging tasks aggregation
2 自主任务聚合方法
本文提出的遥感卫星成像任务自主聚合方法可将密集地面点目标自主聚合为多条带或区域观测任务,从而提升遥感卫星单位时间内的任务执行效能,具体流程如图2所示.

图2 遥感卫星成像任务自主聚合流程Fig.2 The process of imaging tasks aggregation
2.1 任务密集程度识别
在遥感卫星自主任务规划的短周期局部时间窗口(遥感卫星自主任务规划的短周期内包括多个局部时间窗口)精细规划过程中,针对每个局部时间窗口,例如(T1,T2),根据遥感卫星的轨道外推信息,以及滚动、俯仰方向的最大机动能力,计算得到局部时间窗口对应的地面目标点可观测区域范围;根据星载任务池中各个待观测地面目标点的经纬度、高程信息,筛选出地理位置处于此区域范围内的所有地面待观测目标,形成待优化的候选待观测任务集合ST1,T2={si},i=1,2…m.在此基础上,基于候选待观测任务集合ST1,T2中各地面目标点之间相对地理距离,识别该候选待观测任务集合是否需要进行任务自主聚合,基本方法如下:
1)如果该区域范围内存在相邻地面待观测目标之间的距离小于ΔL,则识别出该区域范围内存在可优化的地面待观测目标(地面待观测目标为任务需要进行观测的地面目标点),启动任务集合中任务的自主聚合ST1,T2;
2)否则,则认为该区域范围内不存在可优化的地面待观测目标,不进行任务自主聚合,即当前局部时间窗口对应的待观测目标不需要进行任务聚合.
上述方法中ΔL的设定主要考虑相邻目标卫星过顶时刻偏差以及对其成像时卫星滚动角度偏差2个因素.其中卫星过顶时刻指的是以俯仰零姿态对目标进行成像的时刻.认为只有当相邻地面待观测目标的距离差较小且卫星对其成像的滚动角度相差较小时,对相邻待观测目标进行任务聚合才是有意义的.将以上2方面因素转换为距离方面的表述,可以得到ΔL的计算方法
(1)
其中,L1为星下点轨迹上相邻待观测目标之间的距离,L2=2Rarctan(Hsin(Δφ)/R),Δφ为卫星ΔTv=L1/v内滚动方向姿态机动角度,v表示卫星星下点线速度模值,H为轨道高度,R为地球半径.相邻目标是指星下点轨迹上2个相邻视场中,2个中心点目标,如下图所示.

图3 相邻目标示意图Fig.3 Neighbouring targets
本文中假设相机视场为方形,幅宽为W,因此L1=W,ΔTv=W/v,
(2)
其中,Tω=ωmax/dωmax,ωmax为卫星最大姿态角速度,dωmax为最大姿态角加速度.
2.2 密集任务子集合划分
如果识别出局部区域任务密集,需要进行对地观测密集任务自主聚合,首先识别出该局部区域内满足地面目标点相对距离小于阈值的各处密集子区域,生成各处密集子区域对应的密集任务子集合.基于筛选出的候选待观测任务集合ST1,T2,通过计算各个地面目标点地理位置之间的相对距离,采用基于密度的智能聚类方法,进一步将ST1,T2划分为若干个密集任务子集合sub1,…,subn.
基于密度的智能聚类算法可以从样本密度的角度来考察样本之间的可连接性,并基于可连接样本不断扩展聚类簇,最终实现所有样本的聚类划分[21].本文采用DBSCAN密度聚类算法对密集子任务进行聚类划分.该算法基于一组临域参数(,MinPts)来刻画样本分布的紧密程度.对于待划分任务集ST1,T2={si},定义如下几个概念:
2)核心任务:如果si的-临域中至少包含MinPts个样本,即card(N(si))≥MinPts,那么si就是一个核心任务,其中card(N(si))表示N(si)中元素的个数.
3)密度直达:如果sj∈N(si),并且si是核心任务,则称sj由si密度直达,记为si→sj.
4)密度可达:如果存在样本序列p1,p2,…,pn,使得si→p1→p2→…→pn→sj,那么称sj由si密度可达,记为si⟹sj.
5)密度相连:如果sk⟹si,sk⟹sj则称si和sj密度相连.
导出的最大密度相连集合.给出基于密度的密集任务划分算法如下:
算法1:基于密度的密集任务划分算法
输入:任务集合ST1,T2,临域参数(,MinPts)
过程:
1 初始化核心任务集合:SΩ=∅
2 对于i=1,2,…,m
3 确定任务si的-邻域
4 如果card(N(si))≥MinPts那么
5 任务si加入核心任务集合SΩ=SΩ∩si
8 初始化聚类簇数:k=0
9 初始化未访问任务集合:SΓ=ST1,T2
10 当SΩ≠∅时
11 记录当前未访问样本集合Sold=SΓ
12 随机选取一个核心任务s∈SΩ,初始化队列
13SΓ=SΓ-{s}
14 当Q≠∅时
15 取出队列Q中的首个样本s
16 如果N(s)≥MinPts那么
17 令Δ=N(s)∩SΓ
18 将Δ中的样本加入队列Q
19SΓ=SΓ-Δ
21 循环结束
22k=k+1,生成密集子任务集合subk=Sold-SΓ
23SΩ=SΩ-Sk
24 结束循环
输出:{sub1,sub2,…,subk}
2.3 任务集合地面目标点的凸外接多边形计算
对于密集子任务集合,分别计算各个密集任务子集合subisubi内各地面目标点的凸外接多边形.计算方法为
算法2:目标点的凸外接多边形计算算法
输入:任务子集合subi={s1,s2,…,sp}
过程:
1 计算subi内各地面目标点的几何中心
2 对于j=1,2,…,p
3 计算各个任务点到几何中心的距离
di=dist(si,o)
5 计算最大距离max{d1,d2,…,dp},并将最大距离对应的任务记为v1
6 初始外接凸多边形的顶点队列V=
7 令tmp=1,flag=1
8 当flag==1时
9 对于j=1,2,…,p,sj≠vtmp


12 计算最大夹角,并将最大夹角对应的任务记为vtmp+1
13 如果vtmp+1=v那么
14flag=0
15 否则
16V=V∪vtmp
17tmp=tmp+1
19 结束循环
输出:外接多边形顶点集合V
2.4 成像任务聚合类型判定
在上小节中计算得到的各个密集任务子集合的外接多边形基础上,针对各个外接多边形,分别根据其中地面目标点的分布密集程度确定子任务集中的任务聚合方式,具体方法为
1)将subi划分为ni个边长为载荷相机幅宽b的方形小格;
2)计算地面目标点的分布密集程度参数ui=card(subi)/ni,ui越大认为任务越密集;
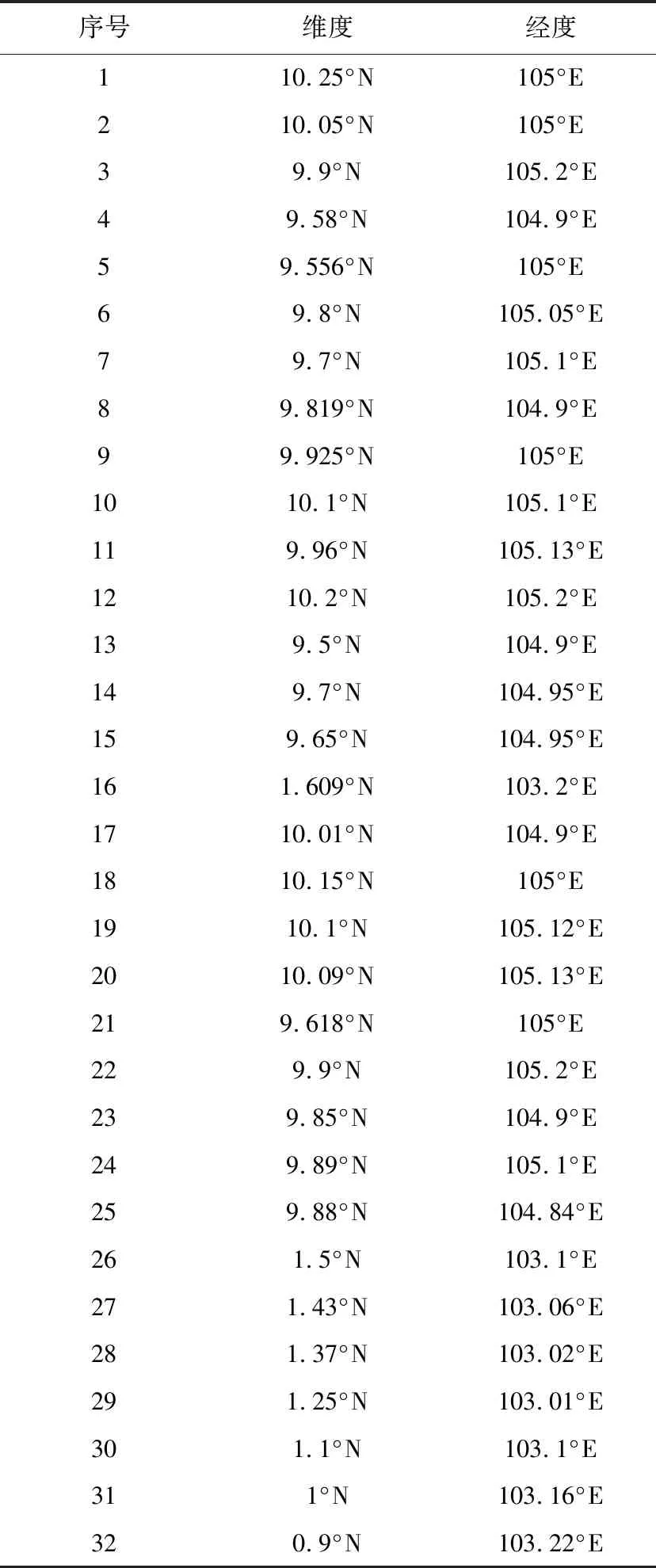
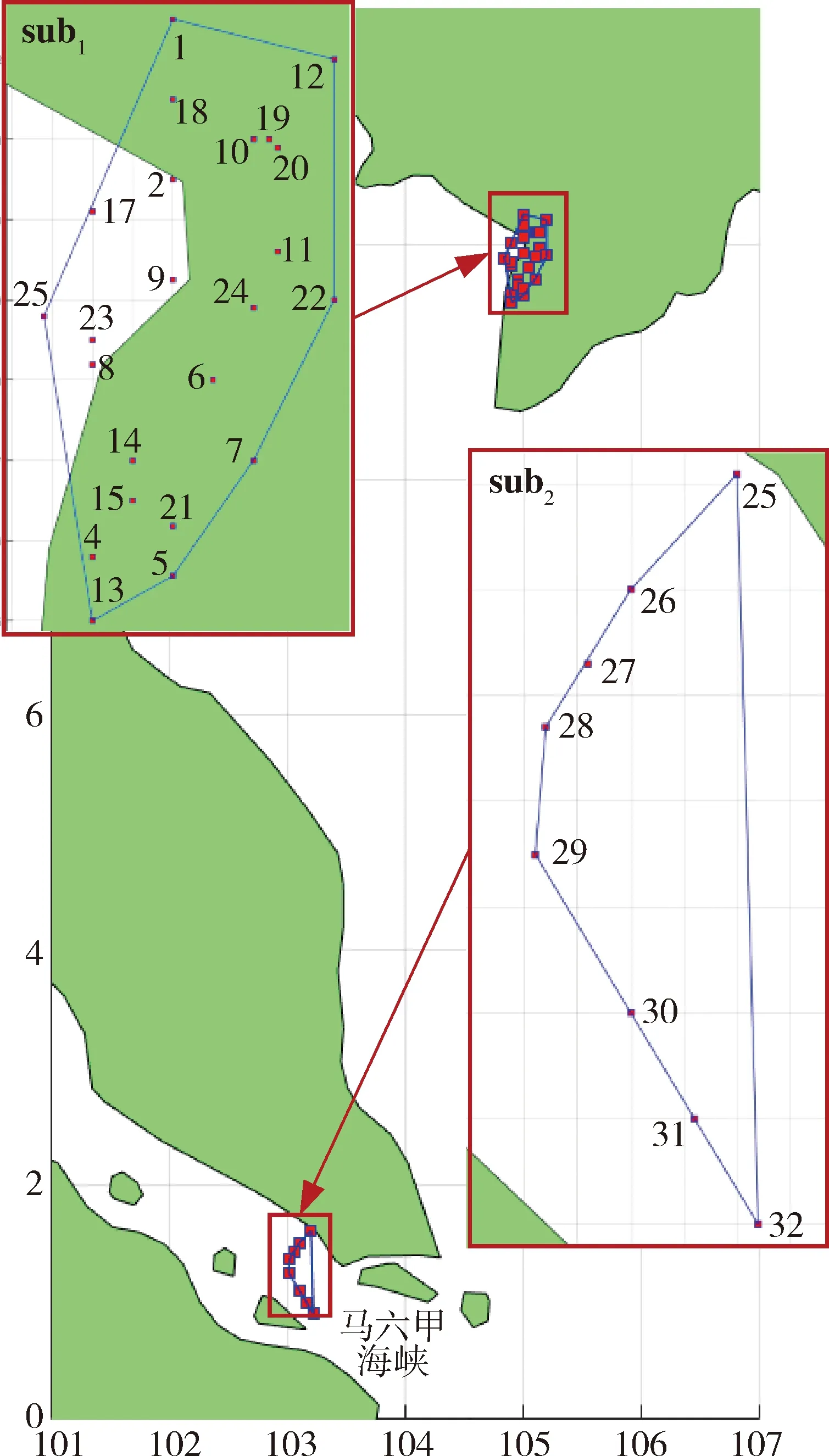
3)如果ui 4)如果ui≥U,认为subi中的地面点目标在该子区域内分布较为密集,则按照区域观测方式进行subi中各地面点目标观测任务的聚合. 其中U为判断阈值,一般取值范围为(0,1]. 对于多条带聚合子任务集subi,通过优化求解的方式将其中的地面点目标聚合为条带目标,优化问题设置如下: 2)约束条件 a)卫星具备点对点姿态机动能力; b)姿态预置角速度平均值ω1(°)/s; c)被动成像推扫线速度平均值vkm/s; d)主动成像匀地速跟踪推扫角速度平均值ω2(°)/s; e)指向地面目标点之前的成像提前时间tpre、指向地面目标点之后的成像延后时间tafter. 其中:Tman为相邻条带间姿态机动时间之和;Timgae为各条带推扫时间之和;α1、α2为优化目标调节系数,取值范围为0-1, 根据优化目标公式可以看出,优化指标J与条带观测聚合覆盖的目标观测点个数成正比,条带间姿态机动时间和条带推扫时间成反比,因此设计此优化目标的原则就是利用尽量少条带推扫时间,而覆盖尽可能多的地面成像任务.对于该优化问题可采用迭代贪婪算法IGA[1](iterated greedy algorithm)进行求解. 对于区域观测聚合任务子集,为减少卫星平台机动次数,减少载荷开始时间以及节约平台能源,区域观测目标推扫条带划分策略采用覆盖给定区域内目标前提下,所分割条带最少、成像时间最短的策略,具体区域观测任务的条带划分方法如下: 对于条带覆盖大于外接多边形的部分,或者条带一端无地面目标点部分,进行相应的裁剪,降低无效的推扫路径. 考虑运行在地球轨道上的遥感卫星WorldView-4 2022年6月7日4时的轨道根数,如表1所示.仿真开始时间设为2022年6月7日4时59分59秒.目标选取地点为马六甲海峡附近,仿真不考虑目标高程信息,具体目标经纬度如表2所示.卫星成像载荷幅宽为15 km,最大滚动和俯仰成像角度为20°,卫星最大角速度2.5(°)/s,最大角加速度0.5(°)/s,点目标单独成像所需时间为5 s,动中成像最大推扫速度为15 km/s,卫星星下点线速度v=6.9056 km/s. 表1 WorldView-4卫星轨道根数Tab.1 Orbital elements of WorldView-4 表2 目标经纬度Tab.2 The longitude and latitude of targets 按照场景设置,参照2.1节定义计算可得ΔTv=2.17 s,Δφ=0.59,L1=15 km,L2=12.66 km,于是有ΔL=19.63.采用2.1节方法对任务密集程度进行判断可知,存在密集任务. 采用第2.1~2.3节方法对目标任务进行聚合,聚合结果如图4所示,图中红色小方块为地面目标点,从图中可以看出共聚合生成2组密集任务:目标1~25为一组记为sub1;任务26~32为另一组,记为sub2. 首先采用传统点目标任务规划方法对32个目标进行规划,采用贪婪算法求解任务规划方案,任务执行结果如图5所示,图中黑色实线为载荷相机视线与地面交线,红色虚线为卫星星下线,黄色透明方块是卫星一次成像区域.从中可以看出sub1中任务8~19、20~24和sub2中任务32无法完成成像,其余任务都能完成成像. 采用2.4节的方法对sub1和sub2进行聚合类型判断,其中sub1中有25个任务,可以划分为16个小方格,目标点分布均匀程度参数分别为1.5625;sub1中有7个任务,可以划分为8个小方格,目标点分布均匀程度参数分别为0.8772.判断阈值取1,那么以此为依据分别对sub1和sub2采用区域观测和多条带观测方式进行任务的聚合,聚合及任务规划结果如图6所示.可以看出sub1和sub2中的所有点目标任务都已执行.sub2中的任务如果采用传统方法,从第一个成像任务开始到最后一个成像任务结束需要71.6 s,而多条带推扫任务从扫描开始到结束共39.46 s,显然在更短的时间内完成了更多的成像任务. 图4 密集任务划分结果Fig.4 Result of dense tasks clustering 图5 点目标任务规划结果Fig.5 Task planning result of point targets 图6 任务自主聚合及规划结果Fig.6 Result of tasks aggregation and planning 基于DBSCAN智能聚类方法,提出了一种遥感卫星成像任务自主聚合方法,通过局部规划窗口范围内任务密集程度识别、密集任务子集合划分、密集子任务集合地面目标点的外接多边形计算、成像任务聚合类型判定、多条带观测模式任务生成及推扫条带划分、区域观测模式任务生成及推扫条带划分,将原本独立的密集地面点目标自主分类合并为多条带观测任务或者区域观测任务,为星上自主任务规划算法提供更加优化的任务输入,充分发挥敏捷遥感卫星所具备的复杂路径姿态机动能力,从而大幅提升遥感卫星单位时间内的任务执行效能.2.5 多条带观测聚合任务生成及推扫条带划分
2.6 区域观测聚合任务生成及推扫条带划分


3 仿真验证
3.1 场景设置

3.2 密集任务划分结果
3.3 任务自主聚合及规划结果


4 结 论
