全自动式安全擦玻璃机械人设计分析
2022-11-01江兴宇孟凡召刘浩然叶红艳
江兴宇,孟凡召,刘浩然,叶红艳
(山东华宇工学院 机械工程学院,山东 德州 253000)
高层住户窗户双层玻璃清洗难度大,危险程度高。为解决此问题,发明了双层玻璃清洗工具。
市场上现有的擦玻璃工具主要分为机械式擦玻璃工具和永磁铁式磁力玻璃工具两大类。机械式擦玻璃工具主要研究安全伸出窗外、能够伸缩,以扩大擦洗范围;磁力擦玻璃工具主要研究磁铁的移动控制、磁力控制和磁性保护、清洁条、刮水条等固定设计等方面。通过调研发现,磁力擦玻璃工具有一个显著的缺点,室外工具在磁力作用下随室内工具移动,经常由于操作者擦洗移动速度不稳或突然加快导致室外工具吸力不足而坠落。虽然大部分室外工具都用安全绳与操作者联系,但仍有一定的安全隐患。
研究开发了全自动安全擦玻璃机械人,可以有效保障磁力擦玻璃机械人的安全功能、吸附功能、行走功能、擦洗功能。
1 存在的问题
机械人在家庭中不断普及,但实用性有待提高,一些技术性问题有待解决。其主要存在以下问题:一是性价比低。有95%的城市高楼玻璃外壁采用的是人工清洗完成,因用户不满足现有擦玻璃机械人的擦拭效果,且价格偏高,一般在2 000~5 000元,无法真正服务于人们。二是清洁效率低,路径规划复杂。擦玻璃机械人一次只能进行一个面的擦拭,擦拭效率低。路径规划上,机械人在碰撞边框后要进行复杂的掉头与拐弯,掉头与拐弯过程中会产生对已擦拭部位的二次污染,擦拭效率低且擦拭效果差。三是清洁效果不佳。擦玻璃机械人能够将玻璃表面擦拭干净,但是窗户边框与直角部位很难擦拭到,擦拭效果不好。采用圆盘式清洁模块的机械人难以擦拭边框和窗户直角区域。四是擦玻璃机械人存在技术问题。每种吸附方式和行走方式均有优缺点,很难同时满足灵活的行走性和稳定的吸附性要求。擦洗移动速度不稳或突然加快,对室内工具影响不大,但对室外工具来讲会因为吸力不足导致坠落。
2 安全式全自动擦玻璃机械人的设计
2.1 结构设计
本装置主要包括室内工具和室外工具,室内工具主要由壳体、移动机构、定位与扫描机构、防磁化机构、可调永磁机构、清洁条、刮水条等部分组成,室外工具主要由壳体、永磁铁、清洁条、刮水条、安全绳等部分组成。

图1 安全式全自动擦玻璃机械人设计结构简图Fig.1 Schematic diagram of the design structure of the safe fully automatic glass wiping robot

图2 安全式全自动擦玻璃机械人设计结构简图Fig.2 Schematic diagram of the design structure of the safe fully automatic glass wiping robot

1.室内工具;2.室外工具;3.内壳体;4.麦克纳姆轮;5.第一清洁条;6.第一刮水条;7.滑动的磁铁块;8.外壳体;9.第二清洁条;10.第二刮水条;11.安全绳;12.螺纹杆;13.矩形块;14.滑动块;15.T型块;16.调整旋钮;17.传感器图3 可调节磁铁设计结构简图Fig.3 Schematic diagram of adjustable magnet design structure
该装置分为室内工具和室外工具两部分。将室外工具靠在窗户双层玻璃外侧,同时室内工具靠在窗户双侧玻璃内侧,两者在磁力作用下隔着玻璃吸在一起,使得磁铁块滑动,磁力达到适当的值。采用麦克纳姆轮实现机械人的灵活转弯与运动,设有传感器,主要作用是扫描定位。在内壳体后端面设有控制装置,包括电源模块、稳压模块、控制单元、传感器、电机电调、无刷减速电机、麦克纳姆轮。控制单元的输入端与稳压模块电连接,稳压模块与电源模块电连接,控制单元与传感器电连接。传感器有多个,其中一个为陀螺仪,控制单元与电机电调电连接,电机电调与无刷减速电机电连接,从而驱动麦克纳姆轮。
安全绳的设置应避免室外工具坠落,将安全绳的另一端固定在室内。
内壳体内可转动设有螺纹杆,螺纹杆螺纹连接有前后滑动的矩形块,矩形块前端固定连接有滑动块,与磁铁块固定连接。
内壳体内前后方向的T型槽内设有可滑动的T型块,T型块内端贯穿T型槽,与滑动块固定连接。
螺纹杆后端贯穿内壳体且固定有调整旋钮。通过旋拧调整旋钮使螺纹杆转动,从而完成磁铁块滑动,调节内壳体内磁力的大小。
2.2 控制系统设计
控制单元采用STM32F40,陀螺仪采用MPU6050,CAN通信模块为TJA1050。
由电源模块进行供电,经过稳压模块稳压后给控制单元供电,控制单元接收传感器的信息并进行分析,通过CAN通信给电机电调发送移动指令,使无刷减速电机驱动麦克纳姆轮执行相关的灵活移动,但是由于麦克纳姆轮移动的灵活性,需要引入陀螺仪对校对角度进行测量并对方向进行实时矫正。
技术路线设计如图4。

图4 安全式全自动擦玻璃机械人控制总体硬件方案结构图Fig.4 Structure diagram of overall hardware scheme of safety fully automatic glass wiping robot control
2.3 吸附结构设计
安全式全自动擦玻璃机械人的主要工作坏境是居民住宅(楼)、商场等,目前主要的吸附方式有真空吸附、磁力吸附、推力吸附。3种吸附方式对比如表1所示。

表1 擦玻璃机器人行走方式比较Tab.1 Comparison of walking style of the glass wiping robot
对3种吸附方式进行比较,结合玻璃厚度,该擦玻璃机械人选用永磁铁吸附方式。设置调节磁力大小装置,使其适用于不同厚度的玻璃。
2.4 行走方式设计
行走方式主要包括车轮式、履带式、框架式、脚步式。由于框架式与脚步式只能采用真空式吸附方式,选用永磁铁吸附,所以只能采用车轮式或履带式。比较4种行走方式,如表2所示。
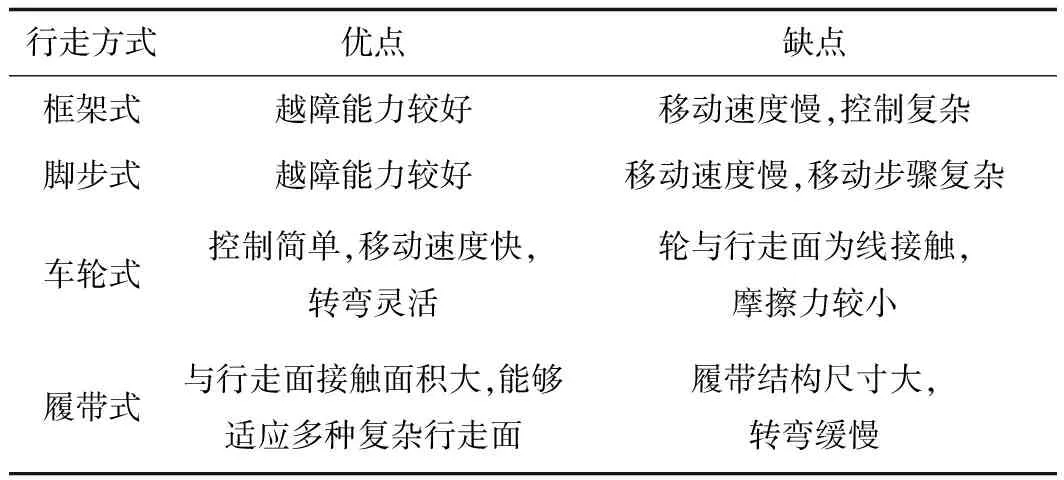
表2 擦玻璃机器人吸附方式比较Tab.2 Comparison of adsorption mode of glass wiping robot
安全式擦玻璃机械人要考虑速度、稳定、转弯能力,因此选择车轮式行走方式。为了提高转弯能力,轮子选取麦克纳姆轮(该轮采用全向驱动技术,可以实现任意方向的平移与原地旋转)。
2.5 工作运行设计
擦玻璃时,用洗涤液浸润第一清洁条和第二清洁条,固定安全绳于室内,将室外工具靠在窗户双层玻璃外侧,同时室内工具靠在双侧玻璃内侧,两者在磁力作用下隔着玻璃吸在一起,选择磁力调整旋钮,使磁力达到适当的值,随后打开控制装置IDE开关,本装置可在移动的同时将玻璃清理干净,正常行进路径根据传感器识别的窗户数据自动规划。如果本装置行进至窗框边缘,受到阻力时,麦克纳姆轮可自动转向保证本工具自动正常运行,不会导致工具脱离窗户玻璃而坠落。当玻璃表面完全擦洗干净时,使用者关闭控制装置IDE开关,错开室内工具与室外工作一定角度,使其磁力减弱以脱开,分离本装置的室内外工具恢复原状,继续上述步骤继续擦洗玻璃直至完成全部玻璃的擦洗。
3 安全式全自动擦玻璃机械人的特点
安全式全自动擦玻璃机械人有以下特点:一是采用传感器与控制单元,可以实现玻璃表面清洗时的自动路径规划。二是采用麦克纳姆轮可以避免工具冲出窗框范围,且移动速度均匀缓慢,不会因人力拖动磁力清洗工具的速度不均而使室外工具脱离磁力,发生坠落事故。三是设有防磁化机构,磁化机构护住无刷减速电机,防止无刷减速电机受到磁铁块影响。四是采用先“之”字来回清洁,再沿边一圈进行收尾,清洁效果较好。五是强力吸附使得清洁盘紧贴在玻璃表面,清洁效果显著。六是采用永磁铁吸附式结构,不消耗电能,结构紧凑,室内机内部设有磁铁升降装置和磁力测量模块来调节磁力大小。
4 结语
擦玻璃机械人是家用智能机器人技术应用于服务行业的一个代表性产品,其能够代替人们进行高空擦玻璃作业,避免了擦玻璃过程中的危险,大大节省了擦玻璃时间,减少了劳动强度。擦玻璃机械人有巨大的发展潜力,应注重安全问题,本设计具有广阔的发展前景。