基于ADVISOR电动汽车制动能量回收策略设计及优化
2022-11-01韦超毅许哲覃小婷黄大明
韦超毅,许哲,覃小婷,黄大明
(1.530004 广西壮族自治区 南宁市 广西大学 机械工程学院;2.530200 广西壮族自治区 南宁市 南宁学院交通学院)
0 引言
由于全球变暖、大气污染和能源危机等问题,新能源汽车的研究与发展成为汽车行业的大势所趋。研究表明,传统汽车在制动过程中会以热能的形式消耗将近一半的有效牵引能量[1-2],而配备有制动能量回收系统的新能源汽车能够回收部分损耗的能量。制动能量回收技术作为新能源汽车的一项关键技术[3],对于增加汽车续航里程和整车经济性具有重要意义。
目前,对于制动能量回收策略研究的重点在于如何合理分配汽车制动时前后轴制动力,并协调再生制动力的占比,在保证汽车制动稳定性的前提下,尽可能回收更多的制动能量。Gao[4]针对混合制动系统的制动能量回馈效率问题,提出了3 种经典制动力分配策略。基于β线的并联式制动力分配策略,有控制结构简单、制动稳定性高的特点。南友飞[5]根据不同的制动强度,对β值进行优化,提升汽车的制动能量回收效果,但并联式策略不能充分发挥电机的制动回收潜力;Khaled[6]参考ECE法规,提出一种以其作为约束的制动力分配方法,同时与滑模控制的方法进行了对比分析,结果表明,以ECE 法规为约束的策略能有效提高制动能量回收率。尹安东[7]采用模糊控制的方法分配再生制动力,并提出了利用遗传算法对模糊控制的隶属度函数进行优化的方法。
以上述研究作为理论储备,针对某款前驱型电动汽车,参考I 曲线及ECE 法规曲线,提出一种依据制动强度划分的前、后轮制动力分配方法。电机制动力的占比使用模糊控制进行调控,使汽车制动时既能满足制动稳定性的需求,又能使制动能量回收率得到有效提高。
1 汽车前、后轮制动力分配
选取某款前驱型电动汽车为研究对象,制动力分配主要依据汽车的整车主要基本参数计算,其主要结构尺寸参数如表1 所示。

表1 某款前驱电动汽车整车主要基本参数Tab.1 Main basic parameters of a front-wheel drive electric vehicle
1.1 汽车制动I 曲线
对于汽车制动过程而言,汽车的前、后轮同时抱死是最为稳定的工况。通过制动时汽车受力分析,在任意附着系数φ的路面上,可得到前、后车轮同时抱死的条件为
通过联立方程消去变量φ可得:
式中:Fμ1,Fμ2——前、后轮制动器制动力;G ——汽车的重力;φ——地面附着系数;b——汽车质心到后轴中心线的距离;a——汽车质心到前轴中心线的距离;hg——质心高度;L ——轴距。
由式(3)可绘制曲线,该曲线表示前、后轮同时抱死时前、后轮制动器制动力的关系,即I 曲线。制动器制动力依据I 曲线分配能够充分利用地面附着条件,制动时的汽车方向稳定性也较为良好。
1.2 ECE 制动法规
为了保证汽车制动时的制动稳定性,联合国欧洲经济委员会对前、后轮制动力分配提出了明确的要求,制定了ECE R13 制动法规。以轿车为例,法规规定[8]:对于φ=0.2~0.8 的各种车辆,要求制动强度满足
在制动极限情况下,车轮的利用附着系数达到最大值,则有φ=z,通过推导可得到基于ECE 法规的前、后轮制动力分配关系曲线公式[9]:
1.3 基于I 曲线及ECE 法规的前、后轮制动力分配
基于上述原理,根据式(3)、式(5)可绘制I 曲线及ECE 法规曲线。这里引入f 线作为新的约束条件,f线是后轮还没有抱死,前轮已抱死时的前、后轮制动力关系曲线,其公式为:
通常沥青或混凝土路面干燥时的峰值附着系数范围为0.8~0.9,雨天路面湿滑的情况下附着系数值会降低,取φ=0.7 为基准进行分析计算。图1为前、后轴制动力分配曲线图,图1 是根据计算所绘制的I 曲线、ECE 法规曲线、f 线。
计算可得图1 中B 点的坐标为(1 567,0),对应的制动强度z=0.125;C 点为ECE 法规曲线与f 线的交点,坐标为(5 391,1 195),对应的制动强度z=0.525。制动力分配策略将根据制动强度分为以下3 个判定区间:
(1)0<z<0.125。当制动强度在该区间时,前、后轮制动力沿着线段AB 分配,由于制动强度较低,制动力全部分配给前轴。前轴是电机驱动轴,此时可直接采用电机制动的方式进行制动,间接提升能量回收率。该阶段的前、后轮制动器制动力为
(2)0.125< z <0.525。当制动强度在该区间时,前、后轮制动力沿ECE 曲线BC 段分配,与I 曲线相比能使得前轴有能力分配更多的总制动力占比,同时满足了ECE 法规的要求,制动稳定性也能得到保证。该阶段的前、后轮制动器制动力为
(3)z >0.525。当制动强度在该区间时,前、后轮制动力则沿DE 段分配。衔接上一区间的制动强度上限,由C 点作等制动强度线交I 曲线于D 点,由D 点起始按I 曲线进行前、后轴制动力分配。随着制动强度的提高,沿I 曲线分配制动力更注重制动稳定性,采取的制动方式也以摩擦制动力为主,此时前、后轮制动器制动力为
2 基于模糊控制的制动能量回收策略
2.1 前轮电机制动力分配
模糊控制是模糊逻辑在控制领域中的应用,其属于一种智能控制理论[10],由于制动回收系统是一种复杂且多因素影响的非线性系统,选用模糊控制来对电机制动力进行分配具有优良的鲁棒性。以制动强度(z)、车速(v)、电池荷电状态(SOC)为模糊控制的输入,并输出比例系数k。k 值代表电机制动力的占比,根据k 值可计算得到相应的电机制动力。图2 为基于模糊控制的制动能量回收策略的整体结构图。
2.2 模糊控制器的设计
设计了以制动强度(z)、车速(v)、SOC 为输入,电机制动力比例系数k 为输出的模糊控制器,该控制器选用Mamdani 型推理方法。模糊化过程是把输入信号经过隶属度函数的处理变为模糊系统能够识别的模糊量,然后依据模糊规则推理得到模糊变换量,最后对模糊量进行解模糊化转变为可直接用于实际计算的数值。
模糊控制隶属度函数的设计如下:电荷状态SOC 的模糊子集为{L(低),M(中),H(高)},论域为[0,1];制动强度z 的模糊子集设为{L(低),M(中),H(高)},论域为[0,1];车速v 的模糊子集为{L(低),M(中),H(高)},论域取[0,100];电机制动力比例系数k 的模糊子集设为{L(低),ML(较低),M(中),H(高)},论域为[0,1],输入量的隶属度函数均选用gaussmf 型、gauss2mf 型的结合,输出量的隶属度函数选用trapmf 型。电荷状态SOC、制动强度z、车速v、比例系数k 的隶属度函数曲线如图3 所示。
模糊控制器的性能取决于制定的模糊规则[11],模糊规则库则由若干“if-then”形式的条件句组成,在模糊系统中起核心作用,通常依据相关理论及专家实际工程经验确定。根据理论分析和大量试验,所制定的模糊控制规则如表2 所示,共27 条规则。

表2 模糊规则表Tab.2 Fuzzy rule
3 基于ADVISOR 的控制策略建模
ADVISOR 是由美国可再生能源实验室开发的可配置于MATLAB 的一款汽车仿真软件,其电动汽车的顶层模型如图4 所示,“<vc>ev”为ADVISOR 预置的整车控制策略模块,底层文件中包含制动力控制策略。通过Simulink 搭建所设计的控制策略,解锁数据库来替换其中的预置模型,并嵌入汽车仿真顶层模型中,实现对ADVISOR 的二次开发。
ADVISOR 是后向为主,前向为辅的仿真软件,整车控制模块包含前向和后向的制动控制模块[12],二次开发需要对前、后两向的策略同时进行修改。本文只阐述修改后的后向路径策略模型,策略模型如图5 所示。该策略模型以需求车速计算得到制动强度,根据制动强度进行判定,并执行对应的子系统,最后输出前、后轮制动力。输出端的前、后轮制动力均为摩擦制动力,这是由ADVISOR 预置的电动汽车整车模型决定的。电机制动力等于扣除前、后轮摩擦制动力后剩余的需求总制动力,公式为:
式中:Fe——电机制动力;Freq——需求总制动力。
4 自适应神经模糊控制优化
自适应神经模糊系统(Adaptive Network-based Fuzzy Inference System,ANFIS)是由神经网络理论和T-S 模糊理论结合而成的,模糊控制主要依靠经验确定模糊规则,缺少自学习和调整的能力,与神经网络理论融合可以弥补模糊控制的缺点。本文通过自适应神经模糊的理论方法对原提出的模糊控制隶属度函数进行优化,所建立的T-S 模糊神经网络简化结构图如图6 所示。
第1 层为输入层,以车速v、制动强度z、SOC 作为输入;第2 层 为隶属度函数层,每个节点代表一个语言变量值,对 应{L,M,H},该层对输入量进行模糊化,计算各输入分量对应语言变量值的隶属度函数;第3 层为模糊规则层,每个节点代表一条模糊规则,根据规则计算出相应的适应度;第4 层为归一化处理层,作用是实现归一化计算;第5 层是输出层,也是后件网络,起着计算每条规则后件的作用,其加权和即为系统输出。
通过大量仿真,对制动相关数据进行筛选,选出符合本文设计要求的数据作为ANFIS 的训练样本,所选取的部分训练样本如表3 所示。利用MATLAB 中的自适应神经模糊ANFIS 工具箱,建立符合上述设计的输入、输出结构,并导入训练数据进行训练,训练结束后精度误差为0.004 559,表明训练结果较为理想,网络精度高。通过自适应神经模糊理论推算得出的模糊规则及隶属度函数,相比人工经验总结的更具有客观性,同时也起到了优化作用。
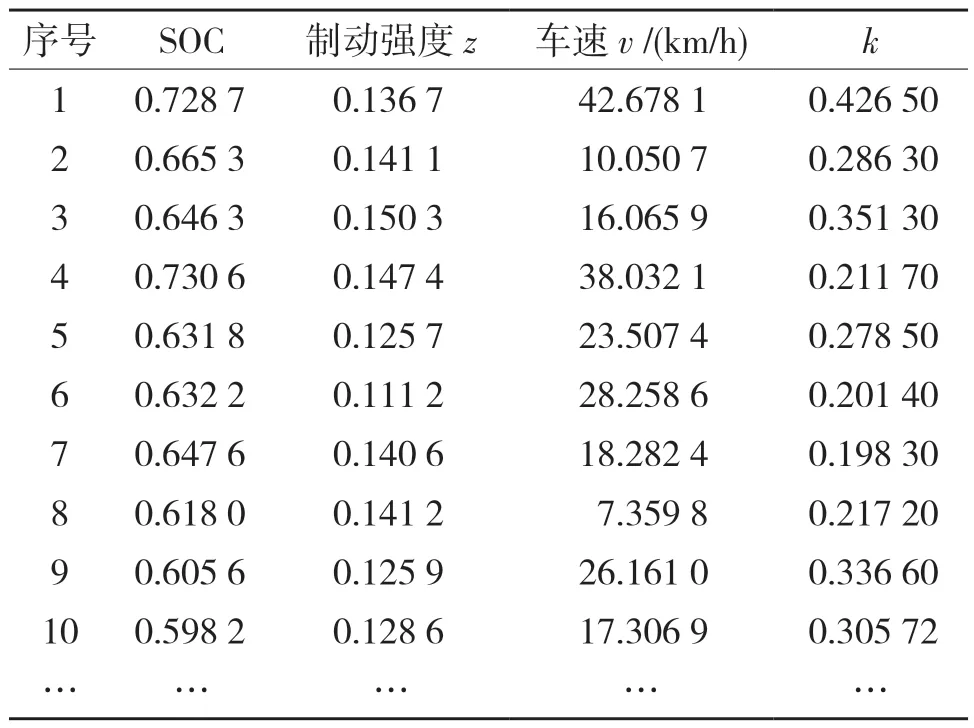
表3 部分训练样本数据Tab.3 Part of training sample data
5 仿真与分析
电动汽车制动能量回收的潜能除了受汽车整车参数、控制策略影响外,还受行驶工况的影响[13]。选用美国城市道路UDDS 工况作为仿真工况,图7为UDDS 工况图。该循环工况的基本参数如下:行驶距离为12 km,行驶时间为1 369 s,平均速度为31.51 km/h,最大速度为91.24 km/h。由图7 可知,该工况制动频繁且较符合日常市区用车情况,用于评价制动回收效果具有一定的科学性。
将研究对象的整车参数通过M 文件写入ADVISOR,选用软件预置的电机(MC_AC75)和电池(ESS_PB25)模型,电机与电池的主要参数见表4、表5。将仿真初始SOC 值设置为0.75,分别对3 种策略进行仿真,仿真结果见表6。

表4 电机(MC_AC75)主要参数Tab.4 Main parameters of motor (MC_AC75)

表5 电池(ESS_PB25)主要参数Tab.5 Main parameters of battery (ESS_PB25)

表6 不同策略的仿真结果对比Tab.6 Comparison of simulation results of different strategies
图8 是3 种策略SOC 变化曲线图,由图8 可知,仿真结束时,FUZZY 策略对应的SOC 值高于ADVISOR 预置策略,表6 数据表明FUZZY 策略下的制动能量回收率为62.34%,较预置策略有明显提高。优化后的ANFIS 策略仿真结果表明,回收能量为767 kJ,较优化前回收能量相比提高了约10%,制动能量回收率也提高了13.3%。综上,说明FUZZY 策略的制动能量回收效果要优于ADVISOR 预置的制动能量回收策略,采用的自适应神经模糊控制的优化方法具有一定的优化效果,制动回收率及回收能量均得到了优化。
6 结语
汽车前、后轮制动力的分配是制动能量回收的关键,通过ECE 法规曲线及I 曲线来约束制动力的分配,能保证汽车制动的稳定性。模糊理论能有效解决多变量的非线性问题。本文提出基于模糊控制的制动能量回收策略,通过仿真结果表明能有效提高制动能量回收率,回收率达到了62.34%,相较ADVISOR 预置策略比能量回收效果有显著提高。为克服模糊理论存在的缺陷,采用自适应神经模糊的理论对原模糊控制的隶属度函数进行优化,制动能量回收率优化了13.3%,对提升电动汽车制动能量回收效果具有一定意义。
