水面垃圾清理设备的研究现状及发展趋势
2022-10-30高增亮钱明星白文强唐保成
刘 瑾, 高增亮, 钱明星, 白文强, 唐保成
(1.山东建筑大学机电工程学院, 山东 济南 250101; 2.山东浩顺机械有限公司, 山东 昌乐 262415;3.山东德润能源控股集团有限公司, 山东 昌乐 262408; 4.青岛润勃水产有限公司, 山东 黄岛 266500)
0 引言
水面垃圾不仅影响环境美观,还易造成河道堵塞、湖水异味等问题。目前常见的水面垃圾主要有4 种:地表植物覆盖层,人类废弃物,意外事故漂浮物以及环境变化滋生的植物等[1]。对于水面垃圾的清理,目前大多数仍采用人工打捞的方式,这种方式清理的范围有限,耗时长且效率低。 针对水面垃圾的自动清理清理,目前出现了诸多的新型设备,本文从设备结构形式、垃圾收集方式、动力驱动装置、设备控制系统及能源供给等方面进行了分析研究。
1 设备的结构形式
1.1 双船体
双船体的设计分为左、右两个独立的船体,可以更好地利用两边的配重, 不仅能满足船上工作操作时的平稳要求,还能满足船上各机构的安装要求[2];每个独立体上宽下窄,可以使船体更加的瘦长,减小阻力与行驶时产生的波浪[3];同时下尖型的船底设计会使船体的重心上移,使双船体的设计比普通船体的稳定性更强,在大风浪来袭时可以稳定工作,不易左右晃动;双船体的设计也使得船中部形成一条贯通整条船的天然流道[4],更易于收集垃圾。如蔡孟凯等[5]设计的城市小型湖泊水面智能清洁装置采用的是双船体结构,船体尺寸为700×800mm,当达到最大入水深度100mm 时,最大载荷为40N;邱智等[6]设计的遥控型水面垃圾收集装置其双船体尺寸为1200×950mm, 吃水深度为400mm,见图1。
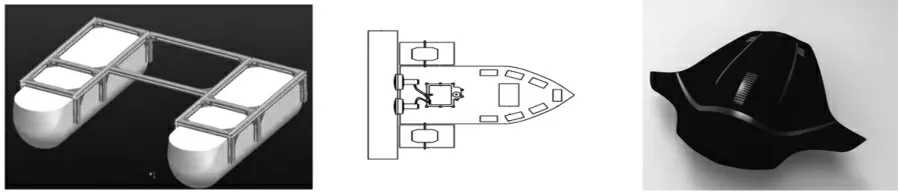
图1 双船体结构图Fig.1 Structure of double hull
1.2 单船体
单船体自身体型相差较大,小型的单船体结构更加灵活,但是单次收集作业的最大容量较小,且小型单船体结构不适合一些机械装置的安装, 因此其一般适用于小型水域人工清理[7]。但单船体解决了双体结构船不能收集岸边垃圾的缺点,安全,高效,可以广泛用于水面清理[8]。如陈嘉伟等[9]设计的水面垃圾保洁船使用的是单船体,船体尺寸为4300mm×1400mm, 最大吃水深度为350mm;邱成果[10]设计的水面垃圾清理船使用的单船体尺寸为14000mm×4000mm,最大吃水深度为800mm,见图2。
图2 单船体结构图Fig.2 Single hull structure diagram
1.3 仿生机器人
仿生来源于自然界,主要以科学技术创新在工程和设计领域提供创新性思维, 从而进行学习和模仿, 解决目前存在的诸多问题[11]。 水面垃圾清理机器人通过模仿鱼类的外形和游动,可以显著降低流体阻力,提高推进效率,更容易在水中保持平衡。 如刘国苹等[12]设计的水面清污器和郭李雯等[13]设计的水面清洁机器鱼都运用了仿生设计,见图3。
图3 仿生机器人Fig.3 Bionic robot
2 垃圾收集方式
2.1 带传动式
带传动式收集装置设置在船艏,外形如履带[14],以防止垃圾回水;带倾斜,一端浸入水中, 另一端固定在船上。当传送带转动时水面上的垃圾会随着传送带传动被打捞上来。这种收集装置能够实现长时间连续作业。但需连续运转,能量消耗大。 如何晓凤[15]设计的一种优化航迹规划的水面垃圾清理船;占金锋[16]设计的水上垃圾清扫船,其收集速度达60m/min,输送带有效宽度1m,伸缩有效行程10m,见图4。
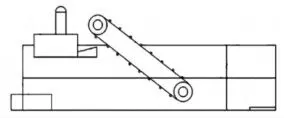
图4 带传动式垃圾清理船Fig.4 Belt drive garbage removal vessel
2.2 叶轮造流式
叶轮造流式收集装置是将船舶前方的垃圾吸入垃圾翻斗中, 由集圾叶轮与导流板组成。 该装置主要通过转动的叶轮使船艏方形成向叶轮的水流, 将漂浮在水上的垃圾导入到垃圾翻斗中,其中叶轮的形式、叶片数、叶轮的浸深和直径都会对垃圾的收集效果产生影响。这种垃圾收集方式适用于环境复杂的水域, 但其结构形式较为复杂,影响垃圾收集效果的因素多。 如温洁[17]设计的珠江水面垃圾清扫船中,收集装置采用的是叶轮造流式,见图5。

图5 叶轮造流式垃圾清理船Fig.5 Impeller flow garbage cleaning vessel
2.3 翻斗式
翻斗式收集装置是一种类似于装载机执行机构的垃圾清理作业装置, 该装置由铲斗打捞垃圾,铲斗入水深度可以随河流深度调整,在船体的运动过程中铲斗可以进行连续作业, 翻斗翻转使垃圾进入垃圾收集箱内。翻斗式收集装置体积大,能耗低,对于一些较光滑的水面漂浮物收集效果比较好, 是一种专门清理湖泊及城市河道等场所垃圾的装置。 市面上一种机械翻斗式清洁船的装载体积可达7.4m3[18],如张玉新等[19]设计的水面垃圾清理船的执行机构采用的是翻斗式收集装置,见图6。

图6 翻斗式收集装置Fig.6 Tip bucket collecting device
2.4 流体涡旋式
流体涡旋式收集装置主要由垃圾收集桶、潜水泵、垃圾储存仓等组成。 在垃圾桶底部安装潜水泵,抽水泵将收集进垃圾桶的水排出桶外,由过滤网实现对垃圾和水的分离,潜水泵实现水的不断循环,并提供涡旋向心吸力。 该装置可以实现船体附近360°无死角连续打捞。 如曹金梅[20]等设计的水面垃圾收集机器人使用的是流体涡旋式打捞装置;王加浩等[3]设计的基于流体涡旋向心吸力的水面清洁机器人,使用的型号为ZQB6X8-12 的水泵,额定功率:120W, 额定流量:2m3/h, 额 定 扬 程:4m,见图7。
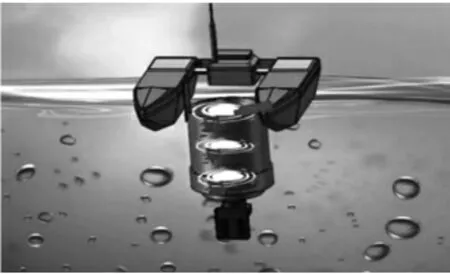
图7 基于流体涡旋向心吸力的水面垃圾收集机器人模拟图Fig.7 Simulation of surface garbage collection robot based on fluid vortex centripetal suction
3 动力装置
3.1 螺旋桨
使用螺旋桨驱动是指用桨叶在水下旋转, 将发动机转动功率转化为推进力,可有两个或较多的叶与毂相连,叶的向后一面为螺旋面或近似于螺旋面的一种推进器[21],见图8。 桨叶的数目、桨叶角和直径都对螺旋桨的性能产生重要影响,使用螺旋桨驱动时驱动力较强; 但使用螺旋桨驱动的转向不易控制[14],这就容易造成危险。 如市面上一种垃圾打捞运输船装载体积为8m3,GJ-H-A 型清洁船装载体积为3m3,二者使用的是艉轴螺旋桨驱动[18];李彧雯等[22]设计的小型水域水面垃圾清理系统使用的是双螺旋桨推动。
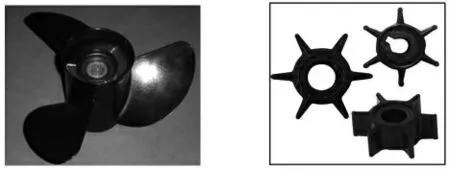
图8 螺旋桨Fig.8 Propeller
3.2 叶轮
叶轮在船体两侧成对称布置,在水面驱动,转动过程中起到了水体增氧的作用, 且叶轮在转动时不容易卷入水生植物,易控制转向,但是动力比较弱,驱动效率较低,叶轮照片见图9。如杨云等[14]设计的小型水面垃圾清理机器人中,选用4 个直径为10cm 的叶轮,对称分布在船体外侧;卢思雨等[23]设计的一种水车式湖面垃圾清理船采用的是叶轮驱动。
图9 叶轮Fig.9 Impeller
3.3 明轮
明轮的直径非常大, 入水深度一般不超过半径的一半, 因此可以避免垃圾缠绕, 而且可以直接看到明轮的运行状态, 便于维护,但是明轮的结构笨重、运行效率低, 在遇到风浪时不易保持航向且容易损坏。 朱永强等[24]设计的海洋垃圾回收船使用的是明轮推进, 该明轮的最大直径为1080mm,工作面大小为300×680 的叶片,工作面的入水深度为150mm 左右,见图10。
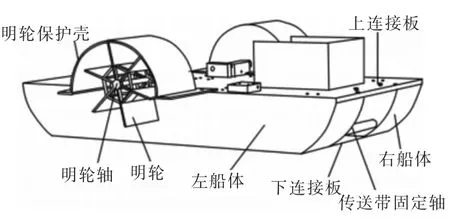
图10 明轮推进的船体结构图Fig.10 Hull structure of paddle wheel propulsion
4 硬件系统
4.1 控制系统
(1)基于ARM 内核的控制系统,具有高速、程序高容量的特点,功耗低,便于实现与上位机的通信;如朱林等[25]设计的一种无人清理船;ARM 驱动各传感器进行数据采集并实现遥控调速[6],完成规定区域内自动打捞工作;携带的GPS 模块随时监测船体位置,无线WiFi 模块可实现无人船的远程遥控,如农建成[26]的无人驾驶水面清污装置中采用的WiFi 无线通讯和手机监控终端。
(2)基于STC15 等单片机的控制核心,具有超强的抗干扰能力以及运行速度快、成本低,特别是开发快捷,稳定性高等特点,如吴海都等[4]设计的水面清洁小卫士使用STC15 作为控制模块,是这方面的典型应用。
4.2 能源供给
水面垃圾清理设备的电源大多使用蓄电池,随着近几年硅材料的不断发展, 太阳能电池板的应用也逐渐增多,但由于制作成本高,推广它的普遍使用还有一定的时间。
(1)以太阳能板+蓄电池为能源供给。 太阳能发电板为铝合金框架,强度高,抗冲击能力强,抗腐蚀性能好,光电转换效率高, 在白天光照充足的情况下可以收集光照将光能转化为电能,储存到蓄电池中,为水面垃圾清理设备直接供给能量,且供能稳定,可以有效节约能源。 如朱盛颖等[27]设计的一种涡旋式水面清洁机器人采用12V 的太阳能电池板,38Ah 蓄电池太阳能电瓶充电作为主要供能系统;陈宏强等[28]设计的水上漂浮发电装置使用了太阳能发电板与蓄电池,其连接原理见图11。

图11 太阳能发电装置电路原理图Fig.11 Schematic diagram of solar power plant circuit
(2)以蓄电池为能源供给。常用的蓄电池一般是铅酸蓄电池,它的电压稳定,价格便宜,但使用寿命比较低,需要日常维护, 将其放置在远离人员的地方, 避免发生危险。 如徐启明等[29]设计的微型水面垃圾清理机器人采用的是蓄电池供电,电压为12V,最高输出电流5A。
5 发展趋势
现有的水面垃圾清理设备主要存在以下问题: 自动化水平低;可清理的范围小,效率不高;能耗大,资源浪费严重;垃圾收集装置容量小,垃圾占用空间大。 未来在水面垃圾清理设备的设计上,有如下发展趋势:
集成化:垃圾收集装置的设计应合理设计尺寸,水面垃圾收集到设备后及时进行压缩处理,使其占用更少的空间从而可以一次清理更多的垃圾,做到在打捞的同时对垃圾进行压缩,可摒弃多种结构形式的简单叠加,节约时间并提高效率。
绿色化: 水面垃圾清理设备的发展趋势是绿色、环保,应合理的利用能源和材料,在减少水面垃圾的同时,降低污染;在回收的过程中,尽量做到分类收集和垃圾的循环利用,提高资源的利用效率[30]。
智能化:实现水面垃圾清理设备的自动探测、寻找和识别水面垃圾,无人操作是水面垃圾清理设备的发展趋势之一,实现人机分离,减轻人工劳动强度,提高清理效率。
