线控主动四轮转向汽车控制策略及试验研究
2022-10-30刘文光徐畅王志民刘浩伟
刘文光,徐畅,王志民,刘浩伟
(212013 江苏省 镇江市 江苏大学 汽车与交通工程学院)
0 引言
转向系统与汽车的操纵稳定性、机动性和安全性密切相关。经过多年的发展,四轮转向技术在越来越多的车型上得到应用[1]。目前应用较为广泛的四轮转向技术为主动后轮转向。四轮转向的控制方法大多是针对这种四轮转向形式,但由于只能控制后轮转角,因此只能较好地控制汽车的1 个状态变量(质心侧偏角或者是横摆角速度),因而对车辆操纵稳定性的改善功能有限[2-4],因此,前后轮转角皆可主动控制的四轮转向汽车成为车辆工程领域的研究热点[5]。
近些年来,越来越多的学者将各种控制理论与控制方法应用于四轮转向车辆的控制系统,取得了一定的研究成果。2014年,北京理工大学的刘启佳[6]等人使用扩展卡尔曼滤波算法建立了3 种非线性质心侧向速度估计模型,基于LQR 最优控制理论建立了基于权函数的四轮转向最优控制策略。仿真表明,该控制策略有效改善了汽车的操纵稳定性。2020 年,NOROUZI[7]等人针对自动驾驶四轮转向车辆面临的不确定性影响,提出了一种自适应滑模控制策略,仿真结果表明,该控制策略对路面附着条件等不确定性具有鲁棒性,能很好地适应不同路况。2021 年,罗玉涛[8]等人针对四轮转向-驱动汽车转角转矩的协调控制提出了一种基于遗传算法的时变LQR 控制系统,仿真结果表明,该控制策略效果优异,能确保车辆具有较好的轨迹跟踪能力。
目前,虽然有部分研究实现了四轮转向汽车前后轮转角皆可主动控制,但仍存在控制要求高以及高速转弯工况下横摆角速度下滑等问题。线控主动四轮转向技术能较好地解决以上问题,因此,本文以线控主动四轮转向汽车为研究对象,首先建立四轮转向汽车二自由度模型;在此基础上提出模型参考滑模控制策略,采用模糊逻辑对抖振进行抑制,实现对前后轮转角的主动控制,使其能够同时跟踪理想的质心侧偏角和横摆角速度;最后搭建了整车试验平台并进行测试。
1 四轮转向汽车系统动力学建模
首先建立四轮转向汽车二自由度线性模型,只考虑汽车的侧向和横摆2 个自由度[9]。二自由度四轮转向车辆模型的运动坐标系如图1 所示。
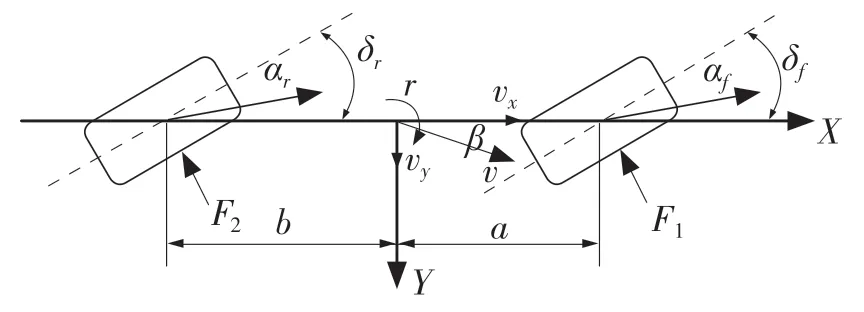
图1 二自由度四轮转向车辆模型Fig.1 2DOF four-wheel steering vehicle model
通过图1 推导得到线性二自由度四轮转向汽车的动力学微分方程为:
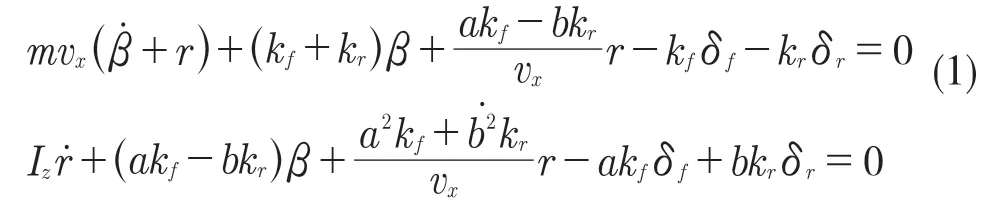
式中:δf,δr——汽车前、后轮转角;m——整车质量;Iz——绕Z轴转动的横摆转动惯量;r——横摆角速度;β——汽车质心侧偏角;a、b——质心至前后轴的距离;kf、kr——汽车前后轴两侧轮胎综合侧偏刚度;vx——车辆沿X轴方向的速度。
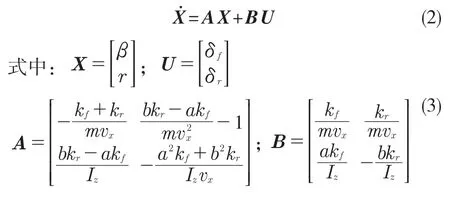
将式(1)转化为状态空间方程形式:
2 四轮转向系统模糊滑模控制策略设计
2.1 四轮转向系统模型参考滑模控制策略设计
以前轮转角输入作为系统参考输入,经过理想参考模型得到四轮转向汽车理想横摆角速度和质心侧偏角,滑模控制器控制前后轮转角,使汽车跟随理想的横摆角速度和质心侧偏角。
理想的四轮转向车辆跟踪模型应能保证车辆在附加了后轮转角之后,其转向灵敏度(横摆角速度稳态增益)能和传统的前轮转向汽车保持一致(即保持驾驶员的驾驶感觉不发生较大变化),同时又能满足质心侧偏角尽量为0(即转向时无侧滑)的要求[10],因此本文理想参考模型是基于线性二自由度前轮转向车辆模型得出:
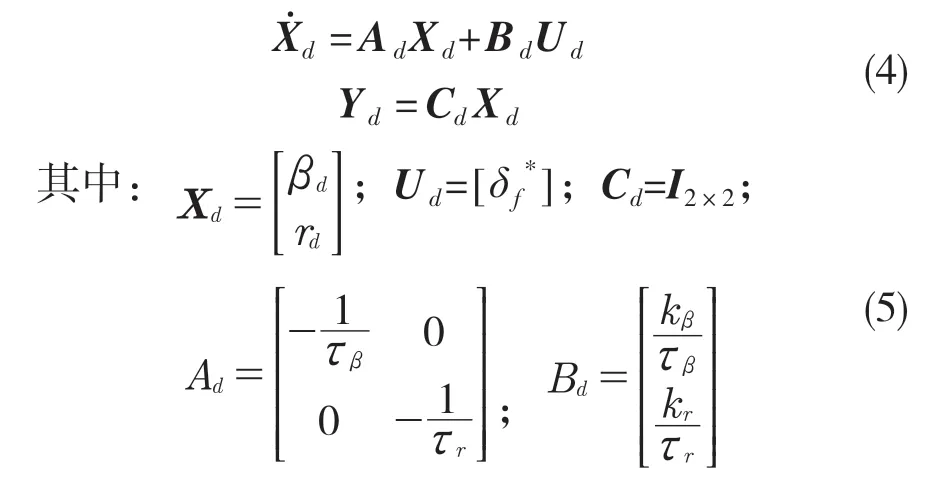
式中:δf*——参考前轮输入转角;kβ——质心侧偏角增益,kβ=0;kr——稳态横摆角速度增益;τβ,τr——理想质心侧偏角与横摆角速度的时间常数。
本文设计滑模控制器的控制目标为在车速、参考前轮转角和汽车参数给定的情况下,控制器控制主动四轮转向汽车的前后轮转角,使主动四轮转向车辆的横摆角速度能追踪理想横摆角速度的值,并且使车辆质心侧偏角尽可能小。
定义实际系统与理想参考模型间跟踪误差为e:

对其求导可得:
构造滑模切换面为:

对切换函数求导,并代入式(7),可得:

本文采用等速趋近率:

式中:G——滑模控制切换增益。

根据式(9)和式(10),可以得到线控主动四轮转向汽车的滑模控制律为:

设计的主动四轮转向汽车滑模控制器由两部分组成:(1)等效控制Ueq,维持系统在滑模面的运动;(2)不连续的非线性切换控制Unl,其作用是使系统状态运动到滑模面上。
设计滑模变结构控制器原理图如图2 所示。
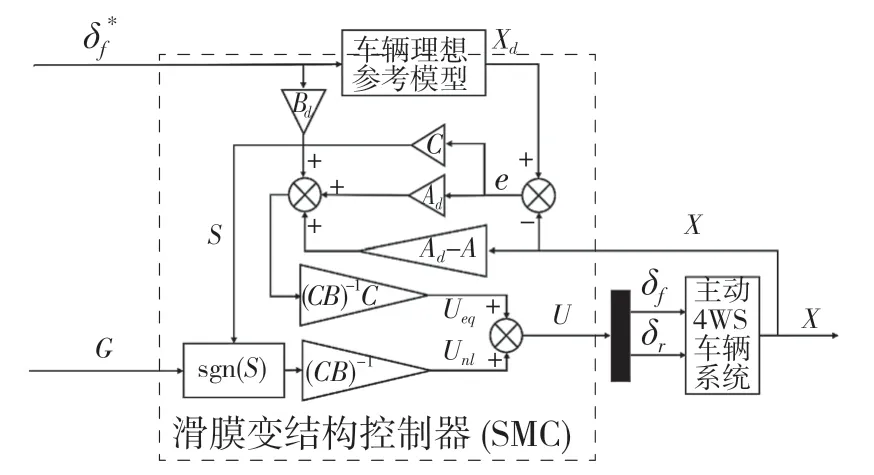
图2 滑模变结构控制器原理图Fig.2 Schematic diagram of sliding mode variable structure controller
2.2 基于模糊控制的滑模变结构抖振抑制
主动四轮转向汽车模型参考滑模控制律中的切换增益G显然会造成系统的抖振。为了满足滑模存在性条件,G值也要随之改变。为了抑制抖振,采用模糊控制方法来动态调整切换增益G的值,改变切换作用的强度来抑制抖振。
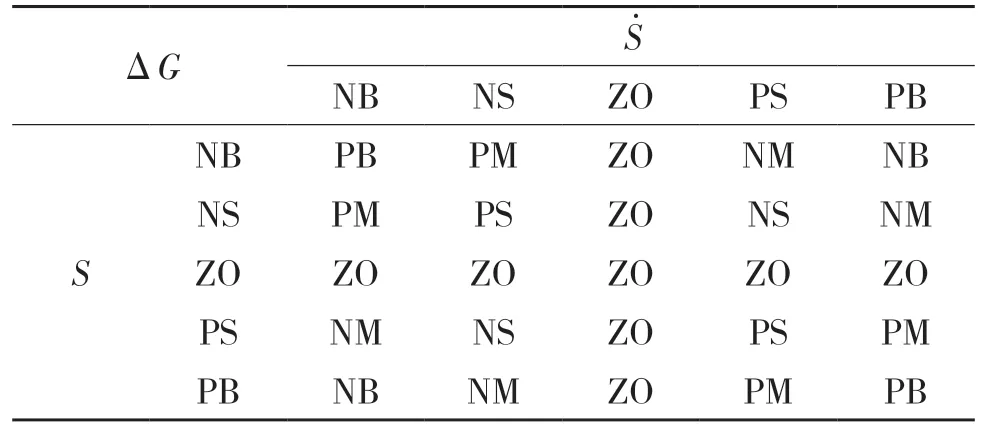
表1 模糊控制规则表Tab.1 Fuzzy control rule
模糊控制规则三维图如图3 所示。
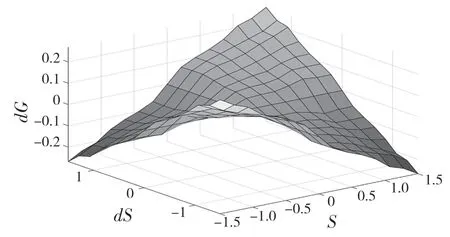
图3 模糊控制规则三维图Fig.3 Three-dimensional graph of fuzzy control rules
3 仿真结果分析
为了验证本文所设计的基于模糊逻辑的模型参考滑模控制方法的有效性,本节通过 MATLAB/Simulink 进行仿真分析,设置仿真参数如表2 所示。
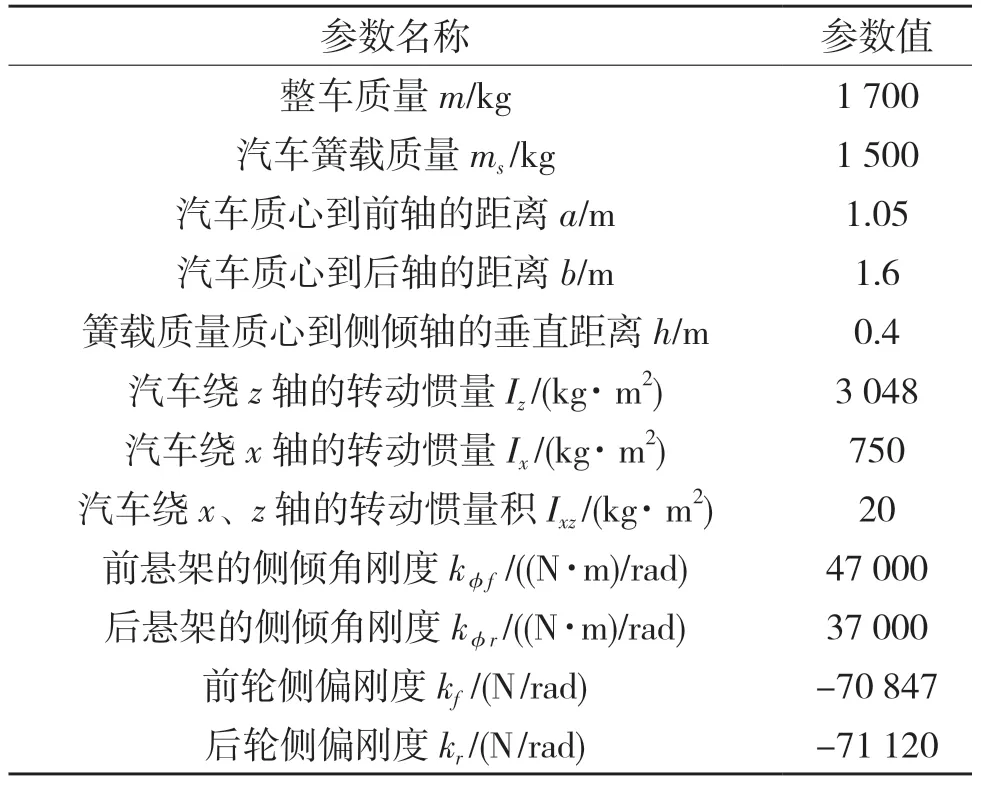
表2 仿真参数Tab.2 Simulation parameters
在汽车低速行驶工况下,目标车速为20 km/h,前轮角阶跃输入下的汽车质心侧偏角和横摆角速度的响应曲线分别如图4、图5 所示。

图4 质心侧偏角阶跃响应Fig.4 Sideslip angle step response
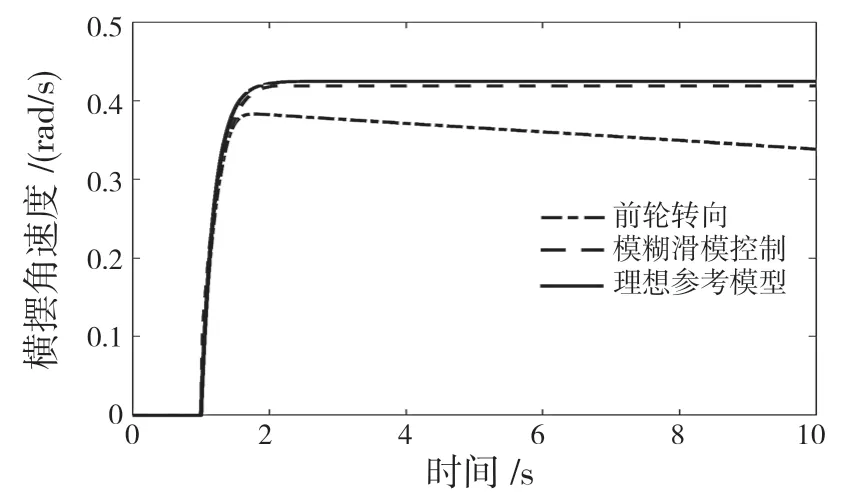
图5 横摆角速度阶跃响应Fig.5 Step response of yaw rate
从图4、图5 可以看出,在低速工况下,采用模糊滑模控制的四轮转向汽车的质心侧偏角和横摆角速度能很好地跟随理想参考模型,而前轮转向汽车的质心侧偏角和横摆角速度与理想参考模型相比有较大的偏差。模糊滑模控制的四轮转向汽车转向更加灵活,更轻便。
在汽车高速行驶工况下,目标车速为80 km/h,前轮角阶跃输入下的汽车质心侧偏角和横摆角速度的响应曲线分别如图6、图7 所示。从图6、图7 中可以看出,采用模糊滑模控制的四轮转向汽车可以很好地跟随汽车的理想质心侧偏角和横摆角速度,质心侧偏角基本为零。且横摆角速度相比于前轮转向汽车没有出现大幅度下滑,驾驶员的驾驶感受相比于前轮转向汽车不会出现明显差异。
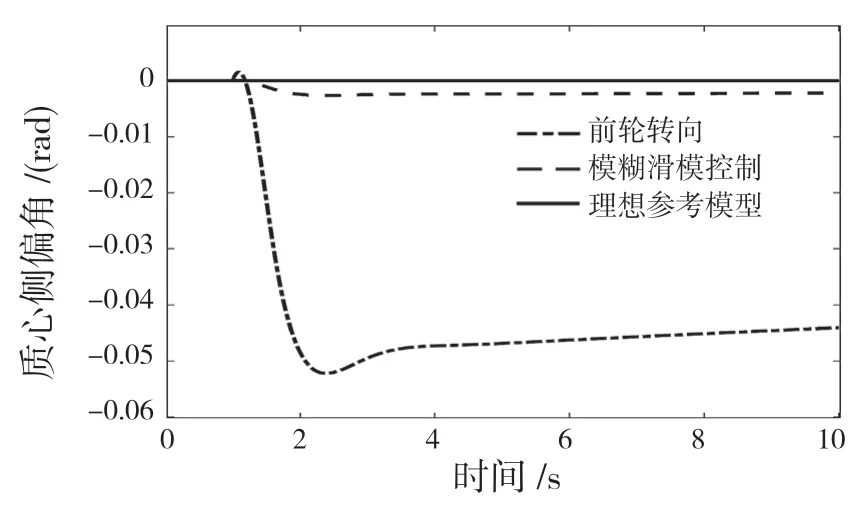
图6 质心侧偏角阶跃响应Fig.6 Sideslip angle step response
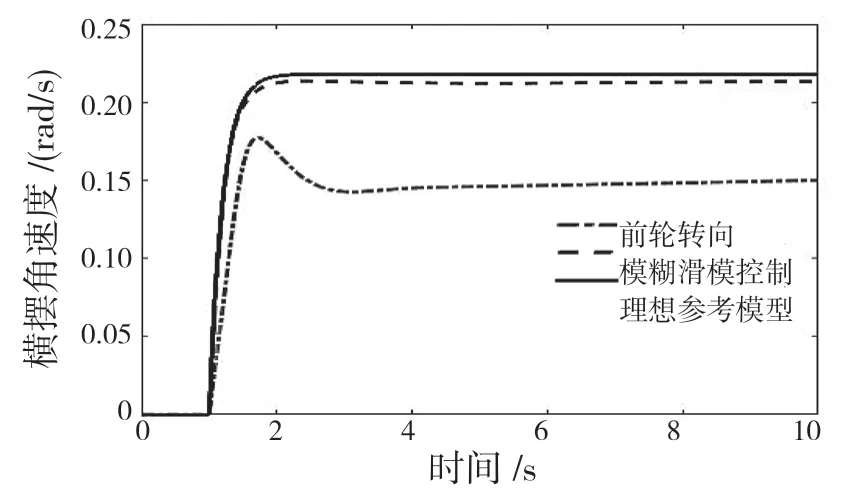
图7 横摆角速度阶跃响应Fig.7 Step response of yaw rate
车速为80 km/h 时,前轮转角正弦输入下的汽车质心侧偏角和横摆角速度随时间的响应曲线如图8、图9 所示。
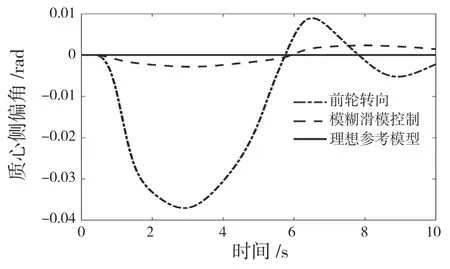
图8 质心侧偏角正弦响应Fig.8 Sinusoidal response of sideslip angle
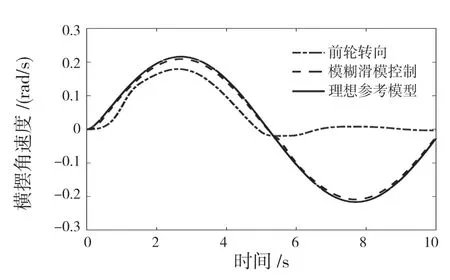
图9 横摆角速度正弦响应Fig.9 Sinusoidal response of yaw rate
从图8 和图9 中可以看出,在汽车高速行驶工况下,采用模糊滑模控制的四轮转向汽车的质心侧偏角很小,且横摆角速度能很好地跟随理想模型的横摆角速度,而前轮转向汽车的质心侧偏角和横摆角速度相比于理想参考模型出现了较大的偏离。
车速为80 km/h 时,线控主动四轮转向汽车的前后轮转向角如图10 所示。给定参考前轮转向角输入,前后轮转向角同向转动,且均可实现主动控制。前后轮转向角经过短暂调节后进入稳态,通过模糊控制算法的调节,抑制了抖振现象。
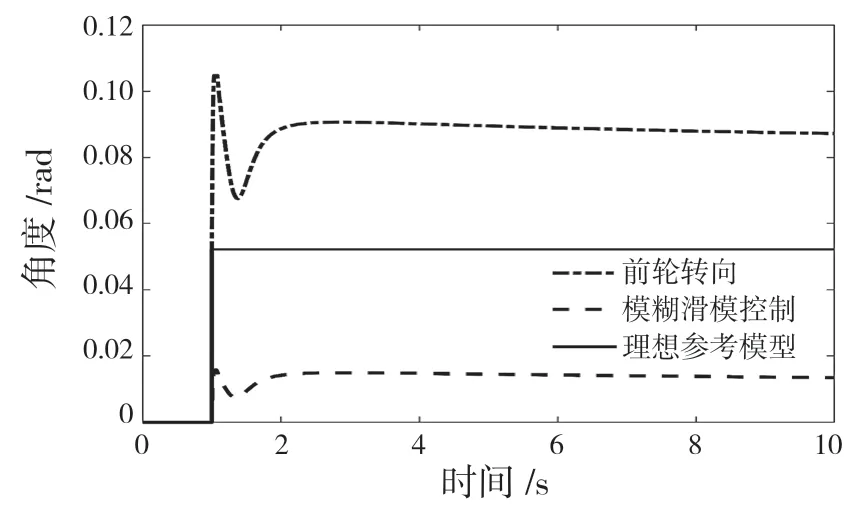
图10 前后轮转向角Fig.10 Steering angle of front and rear wheels
4 试验样车搭建和测试
4.1 试验样车搭建
该试验样车前后轮转向系统均采用线控转向技术,由路感电机反馈路感信息,转向执行机构由有刷直流电机驱动,前后轮转向角度由电控系统控制,可实现线控主动四轮转向。该试验样车主要由轮毂电机模块、电池模块、方向盘模块、前后轮转向执行模块、车辆状态传感器、转向系统控制单元和整车控制单元(ECU)等组成。前后轮转向角和方向盘转动角度由转角转矩传感器测得,并反馈给转向系统控制单元。加速度传感器和横摆角速度传感器集成在一款惯性传感器中,可把车辆行驶时的状态信息传递给整车控制器,整车控制器通过CAN 通信将车辆的状态信息包括车速等发送给转向系统控制单元。
在线控四轮转向模式下,方向盘转角信号作为参考输入,转向系统控制单元根据当前汽车运行状态,通过设计的控制算法计算出理论前后轮转角,然后控制前后轮转到相应的角度,前后轮转角传感器实时反馈实际的前后轮转角,从而实现闭环控制。
试验样车的主要参数如表3 所示。
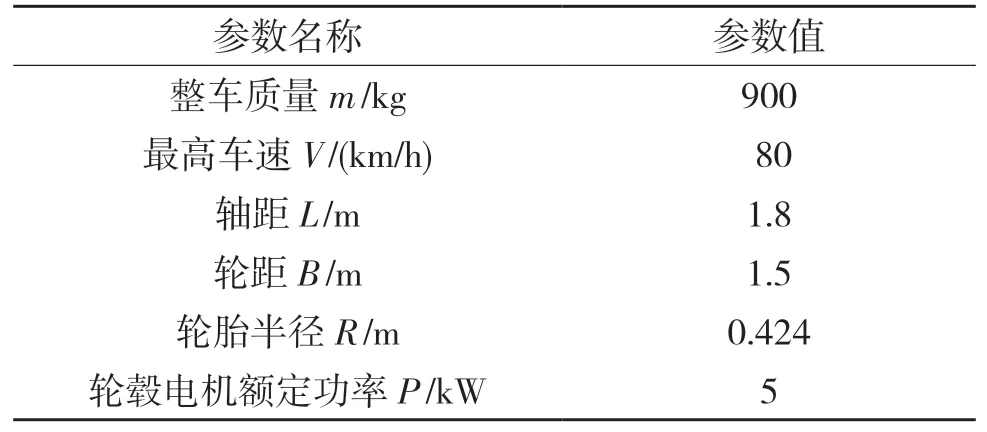
表3 整车参数Tab.3 Vehicle parameters
4.2 试验样车转向系统测试
对搭建的线控主动四轮转向试验样车进行测试。测试结果显示:该试验样车不仅能实现普通汽车的前轮转向功能,通过模式切换,还能实现线控主动四轮转向、平移换道、原地转向等功能。前后轮转向角反向模式如图11 所示。
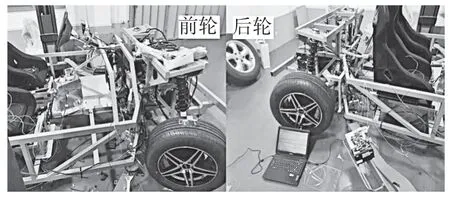
图11 前后轮转向角反向模式Fig.11 Steering angle reverse mode of front and rear wheels
前后轮转向角同向模式如图12 所示,该试验样车的前后轮同向转动。本试验样车的前轮转向系统的转向轴上安装有电磁离合器,可以实现前轮转向模式和线控主动四轮转向模式之间的切换。

图12 前后轮转向角同向模式Fig.12 Steering angle of front and rear wheels in the same direction mode
5 结论
线控主动四轮转向技术在提高汽车操稳性和机动性方面具有广阔的应用前景。本文以线控主动四轮转向汽车为研究对象,首先建立四轮转向汽车二自由度模型,在此基础上提出模型参考滑模控制策略,采用模糊逻辑对抖振进行抑制,实现对前后轮转角的主动控制,使其能够同时跟踪理想的质心侧偏角和横摆角速度。最后搭建了整车试验平台并进行测试。通过仿真与试验研究,主要得出以下结论:
(1)所设计的基于模糊算法的模型参考滑模控制策略能够有效改善汽车的转向性能,同时能够很好地匹配线控四轮转向车辆。
(2)搭建了线控主动四轮转向试验样车并进行测试,结果表明该试验样车能够实现理想的前后轮转角同向模式和反向模式。
