基于深度学习的某型远火武器系统故障诊断方法研究
2022-10-27李思雨王沁蓉黄少罗姚恺刘华清
李思雨,王沁蓉,黄少罗,姚恺,刘华清
(1.陆军工程大学石家庄校区,河北 石家庄 050003;2.西北大学 信息科学与技术学院,陕西 西安 7100683.武警山西省总队,山西 太原 030012)
远程火箭炮武器系统,简称远火,具有打击射程远、突防能力强、毁伤范围大等优点,但部队在实际组训中,由于其装备操作复杂、信息化程度高、受训场地有限等原因导致参训人员难以真正掌握武器装备操作和维修技能,一旦装备或机构出现损坏将严重影响训练和科研工作的进度[1]。借助深度学习方法,基于半实物仿真的训练模拟器,采用与实装一致的组合面板,构建系统硬件环境,通过计算机模拟组合内部电路功能、实现各组合的逻辑控制,建立一个逼真的人机交互操作界面,可以在脱离实装的情况下进行相关的训练,模拟出故障情况,作为算法的输入,通过神经网络训练优化,得出故障诊断结果。
1 深度学习
深度学习核心思想是无监督学习,每次用无监督学习只训练一层,将其训练结果作为更高一层的输入,用自顶而下的监督算法去调整所有层。其中具有代表性的深度学习是卷积神经网络(CNN)、深度信念网络(DBN)和堆叠自动编码机(SAE)。
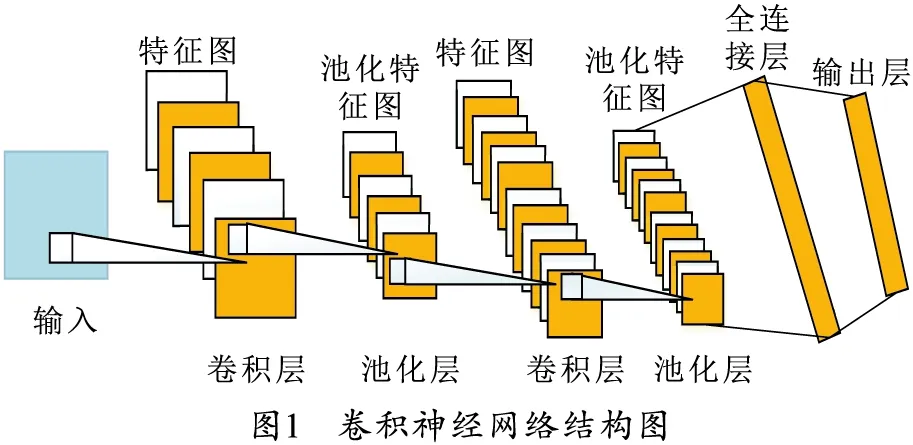
卷积神经网络(CNN)是一种前馈神经网络的深度学习,它的人工神经元可以响应一部分覆盖范围内的周围单元,对于大型图像处理有出色的表现。该网络模型结构包括输入层、多个卷积层和池化层,以及全连接层和输出层[2]。输入层通过梯度下降学习算法,处理不同维度数据;卷积层内含多个卷积核,通过特征提取进行标准化;池化层的功能是完成相关的特征图统计量;全连接层处于神经网络隐含层的末端,仅向其他全连接层反馈信号;输出层的运行原理、基本结构与一般前馈神经网络输出层功能相同。常用的卷积神经网络结构,如图1所示。
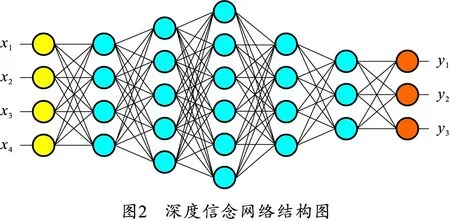
深度信念网络(DBN)既可以用于非监督学习,相当于自编码机,也可以用于监督学习,相当于分类器。由若干层神经元组成,组成部分受限玻尔兹曼机(RBM)。可以对训练数据进行深层表达的图形模型,借助RBM逐层叠加,从中获取多种有效的特征[3]。然后通过贪心算法对各层网络进行训练和优化,最后以反向微调的方式提高DBN的故障识别能力,无监督训练算法,能自适应的完成数据的特征提取和故障诊断,并且具有处理非线性和高维数据的能力,因此适合解决新时期的“大数据”问题,深度信念网络采用的是层与层之间的全连接方式,其常用结构如图2所示。
堆叠自动编码机(SAE)模型是一个由多层稀疏自编码器组成的深度神经网络类型,上一层的自编码器的输出作为后一层自编码器的输入,最后一层是一个分类器,也就是一个逐层累加的过程,每层的输入数据作为一种特征表示,加入到自动学习的特征里面,来逐渐提高学习的能力,深度神经网络预训练的关键方法,从低层开始,每个AE进行单独训练。利用作标签的数据对整个深度神经网络进行微调整,来得到最优化方案[4]。
综合比较上述几种算法,深度信念网络(DBN)的网络结构是全连接的方式,且有预训练,训练时间过长,运算量相对较大,对于问题的分类,存在精度不高,且记忆功能不足;堆叠自动编码机(SAE)训练方法是梯度下降法,更擅长处理数据降维、降噪等多元问题;卷积神经网络可以自动的对特征进行提取,卷积滤波器发挥作用,训练得出模型泛化能力强,与上述两种神经网络相比,更适用本文研究。拟采用卷积神经网络的学习算法来对远火装备进行故障诊断[5]。各种神经网络比较如表1所示。
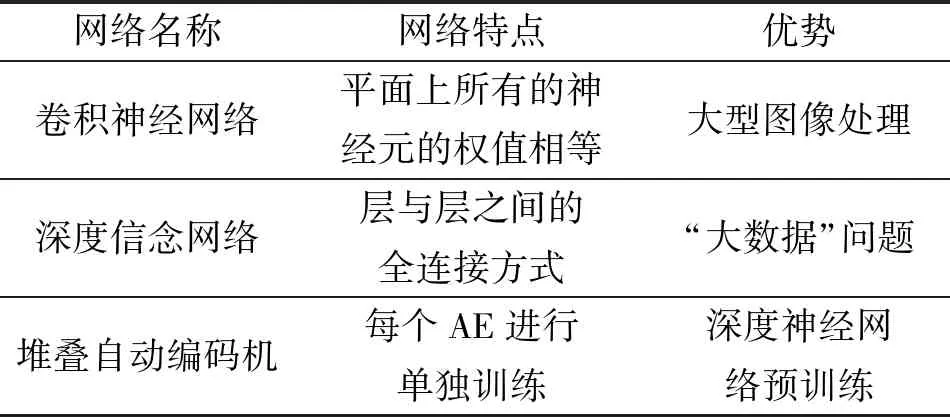
表1 各种深度神经网络比较
2 远火故障模式与机理建模
2.1 工作状态模拟
以远火指控系统面板上的操作示意图为例,说明如何完成对其工作状态的模拟,原理框图如图3所示。
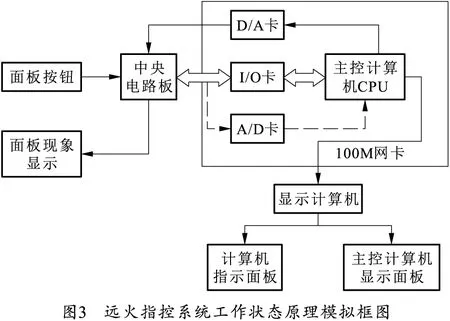
当按下系统面板上的操作按钮时,按钮的状态改变(由低电平转换成高电平,或由高电平转换成低电平),该状态改变信息经面板控制电路传送到中央电路板,经调理、驱动处理后,传送到主控计算机的I/O卡。经采集后,由主控计算机进行数据处理,从数据库中调出相应的火箭炮控制系统显示信息,一部分通过I/O经中央电路板传送给相应的面板控制电路,再由面板控制电路控制相应的指示灯显示;一部分通过D/A卡转换为模拟量,再经中央电路板传送给相应的面板控制电路,再由面板控制电路控制相应电表显示;一部分通过网卡传送给显示控制计算机的显示器上显示相应的图像信息[6]。
火箭炮控制系统面板上的手轮操作模拟与按钮操作模拟类似,不同之处是数据录入主控计算机是通过A/D卡转换后录入的[7]。
2.2 远火故障状态模拟
为了贴近部队装备保障的实际需求,提高保障效率和维修水平,对远火武器系统装备故障模式及故障机理进行建模研究是十分必要的。远程火箭炮武器系统内部结构高度信息化集成,设备之间的连接与控制关系复杂,故障发生时,模式较多。同时,由于软件的作用更增加了系统故障的耦合性和不确定性。所以,故障模拟是远火武器系统虚拟维修实现的难点之一[8]。对于远火武器系统故障模拟建模需要完成两方面。
首先对装备发生故障时的模式进行研究。结合远火装备构造特点,对装备的层次、类别划分,详细描述每个层次单元的故障模式以及对装备功能性能的影响,将各种故障模式分为显性故障、隐性故障、软故障、硬故障、软件故障、硬件故障等多种类型,依据故障产生的影响进行故障分级。
其次对于故障机理进行建模。方法是把原理分析和实装试验分析二者结合。单体设备方面从其功能和构成出发,借助以可靠性为中心的维修(RCM)和失效模式与影响分析(FMEA)等理论,对于组成设备和其软件部分可能发生的故障进行研究,通过分析得出各个单体设备的故障模式、发生现象、产生的故障信号特征;然后,分析各单体设备之间的连接关系和工作原理,通过分析传输信号的种类、数据组成、收发时序等参数,明确单体设备之间的故障影响模式,建立相应的故障机理模型。对于实装方面,在实际装备上进行故障试验,着重采录单体操作面板的故障现象、采集单体设备输入、输出端口的信号特征等,对故障机理模型进行修正和完善。以远火武器系统训练模拟器为例,远火故障状态模拟原理如图4所示。
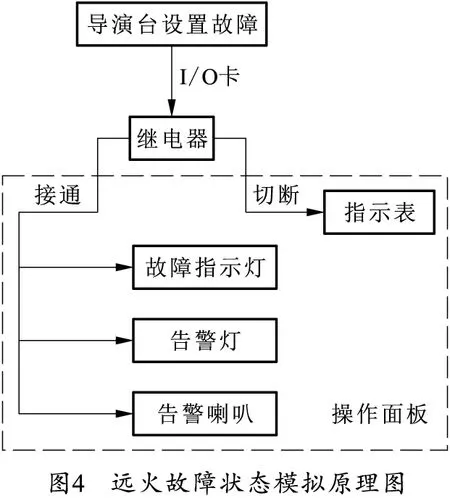
远火武器系统训练模拟器的导演台(指控系统)的主控计算机设置故障类型产生故障状态,可以从数据库查找到对应的故障点,经由I/O卡设置相应的继电器为故障状态,继电器则切断远火指控系统操作面板上相应指示表的正确指示,同时接通告警灯、告警喇叭以及对应的故障指示灯,从而正确显示故障现象,参训人员就可以通过故障现象判断相应的故障类型。
3 实验验证与分析
上述提到的火箭炮故障状态模拟的方法在很大程度上方便了维修操作人员对远火武器系统的故障判别和诊断,由于是人工操作,与智能诊断相比,还有一定的差距。而深度学习算法的引入,使实现模拟器中诸多类型故障的智能分类变为可能。将远火训练模拟器模拟产生的故障和深度学习的智能诊断算法结合,实现远火武器系统故障的智能诊断。
3.1 深度学习诊断方法
相较于机器学习,通过人为识别信号灯进行故障诊断方法有两点不足之处:一是由指控系统(导演台)可以设置的故障有50多种,但是利用操作面板显示故障类型却只能达到32种,同时对于耦合故障和一种故障多种原因的情况,人工分析并不能通过读取操作面板的指示灯显示分析得到;二是在工作效率和判断故障的准确度方面,人工操作与计算机的运算速度是无法相比。因此,笔者将导演台可设置的所有可能的故障情况和与之对应的故障原因作为分析的故障数据,即卷积神经网络的输入,经过卷积神经网络学习之后,可用于故障情况的判别和分析[9]。
3.2 实验验证
实验以远火武器系统的营连射击指挥车在操作训练过程中常见的故障情况为例,借助训练模拟器进行故障模拟,以卷积神经网络为主的深度学习算法进行故障诊断分析,如表2所示。
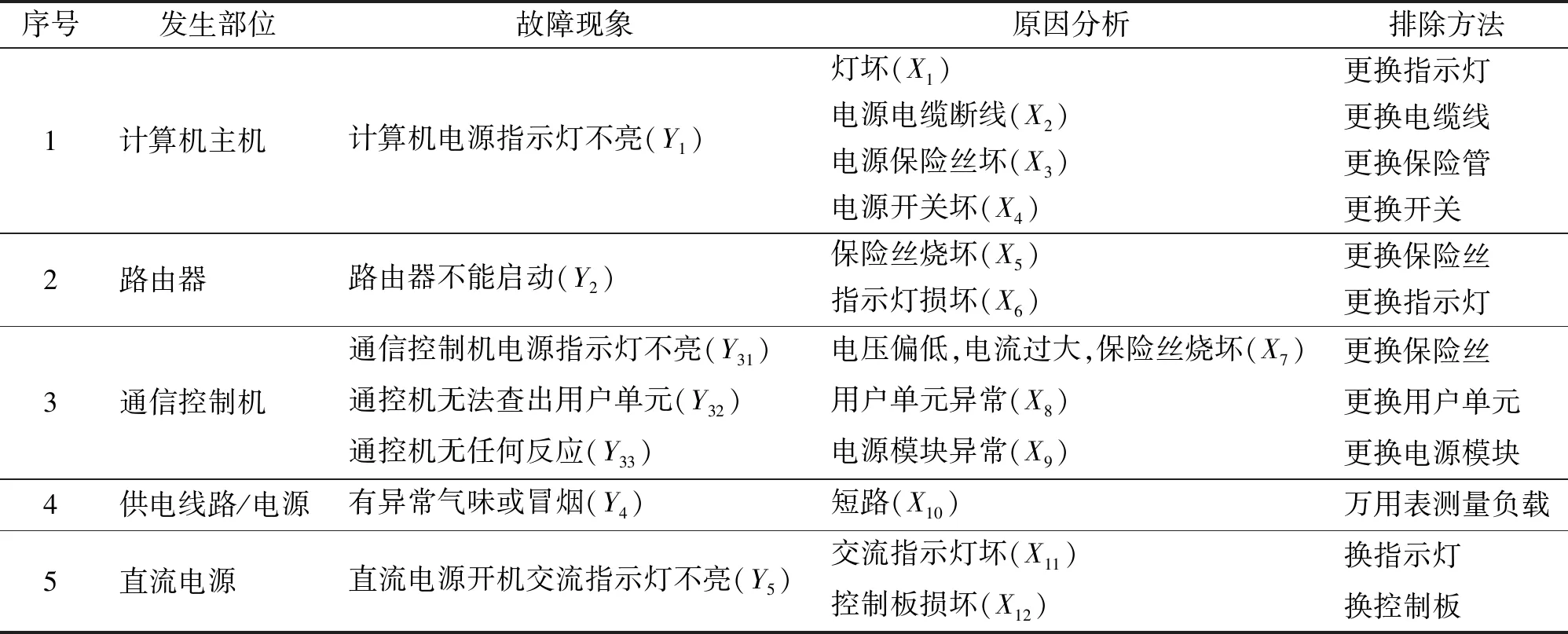
表2 几种常见故障及原因
实验步骤:
1)产生实验数据。在表2中,描述了远火营连射击指挥车的5种故障现象和相对应的12种故障原因,故障现象是由多种不同的故障原因引发,二者之间存在关联。设Y为故障数据,则对应上述5种故障,可将Y划分为:Y1,Y2,Y3(Y31,Y32,Y33),Y4,Y5;设X为故障原因(不同的故障原因可能导致同一个故障的发生),可将X划分为X1,X2,…,X12,则一组故障数据如下:Y1-X1,Y1-X2,Y1-X3,Y1-X4,Y2-X5,Y2-X6,Y31-X7,Y32-X8,Y33-X9,Y4-X10,Y5-X11,Y5-X12。
通过训练模拟器将上述表中的5种故障模式(Yi)和故障原因(Xi)重复设置100次,即可得到100组故障数据(故障现象与故障原因对应,组成故障数据)进行记录,将数据作为输入,其中随机选取70组数据作为深度学习的训练数据,其余的30组数据作为测试数据。
上述的故障数据是作为机器学习的输入,而本文的目的则是到达能够智能判断故障类型的效果,所以故障类型作为机器学习的输出。
2)通过训练获取参数。卷积神经网络的核心和关键在于卷积层和池化层,为了选取适合本文故障数据的最优网络结构层数,分别选取不同的卷积网络结构进行实验,通过对比实验结果,选取最优的网络结构[10]。卷积神经网络不需要过多层数就能达到很好的训练效果,而过多的层数反而会带来运算量过大,影响训练效率等问题,为此,笔者选取较少的网络结构层数作为实验分析的过程,不同结构的卷积神经网络对比分析如表3所示。
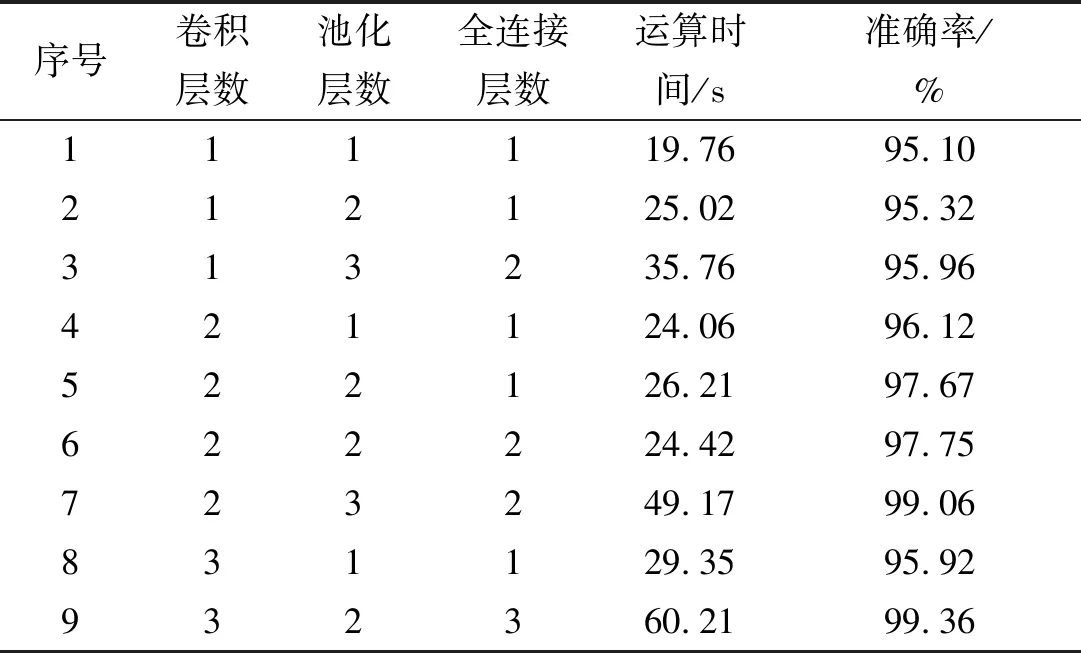
表3 不同结构的卷积神经网络对比分析
从表3中可以看出,训练时间最短的是19.76 s,精度最高的是99.36%,然而过多的网络层数会导致过长的训练时间,而过少的网络层数则会带来准确率较低的问题,为此,权衡训练效率和训练精度,笔者拟采用的卷积神经网络的结构为:卷积层2层,池化层2层,全连接层2层。
在确定网络结构之后,通过MATLAB软件,应用其中的深度学习部分功能,将上述部分实验得到的数据作为输入对学习机进行训练。对于卷积神经网络的迭代次数、训练批次和学习效率都是需要进一步确定的参数,迭代次数的训练过程如图5所示。蓝色曲线表示拟合曲线,是尽可能平滑的曲线;绿色曲线表示实际训练过程的曲线,从图中可以看出其上下起伏的次数较多,可以说明该曲线是符合实际情况的复杂性;红色虚线表示理想情况下得到的曲线,通过观察对比可以看出绿色曲线大致在红色虚线附近,进一步验证了该曲线是符合实际情况的。
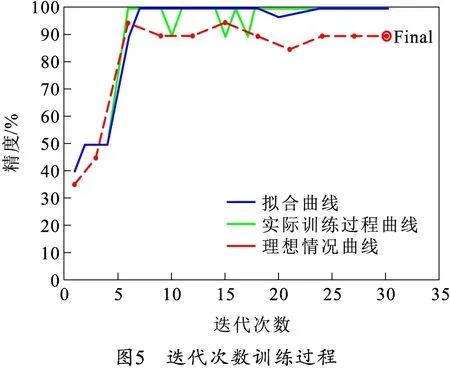
从图5中可以看出,迭代次数达到8次的时候,训练结果的准确度就不再随着迭代次数的增加而上升,因此,可以判断最优的迭代次数为8。
3)验证实验数据。经过上述70组训练数据的训练已经得到了最优的CNN结构和相应的网络参数,经过训练CNN更像是一台学习机器,之后使用剩余的30组数据作为测试数据,即可得到 DBN、SAE中的实验结果。通过分析实验结果,进一步说明CNN诊断效果的优越性,不同算法之间的结果比较如表4所示。

表4 不同算法之间的结果比较
通过分析表4的实验结果可知,其中深度信念网络(DBN)在训练时间和训练结果的准确度方面都不如其他两个网络的诊断效果好,而堆叠自动编码机(SAE)在训练时间、诊断结果的精度上与卷积神经网络相比较低,因此,可以说明卷积神经网络更加适合本文的诊断数据。同时,更加说明深度学习算法相比人工识别而言,在使用的训练时间和诊断的精度方面的优势更加不言而喻[11]。
4 结束语
远程火箭炮武器系统训练模拟器采用了一体化综合模拟设计方法,借助半实物仿真技术,能够替代实装的结构、动作教学,可以进行结构分解结合、故障设置与排除等一系列维修活动。通过训练中可能存在的多种故障模式分析研究进行模拟仿真,之后又使用深度学习的方法实现了对多种故障情况进行诊断实现智能分类。笔者从故障机理建模和深度学习算法两个方面详细阐述了远火训练模拟器如何使用深度学习的智能故障诊断方法实现故障诊断。通过实验证明,深度学习的智能诊断方法为解决复杂武器系统的故障诊断和识别提供了一种新的技术途径。该方法能够大大减少对装备的损耗,降低训练成本,具有明显的军事和经济效益,同时也为其他现代化武器系统提供了一种新的训练模式。
