防空高炮武器系统仿真设计与实现
2022-10-27王华天张春曹润清
王华天,张春,曹润清
(1.西北机电工程研究所,陕西 咸阳 712099;2.西安航空计算技术研究所,陕西 西安 710065)
伴随着计算机领域的飞速发展,仿真科学与技术也得到了长足发展。尤其在国防、军事领域,探索基于信息化作战能力的新型武器装备体系,评估武器系统的作战效能,优化改进现有装备体系的设计,需要基于模型系统工程的建模仿真分析[1]。仿真水平的不断提高,可以大幅度降低武器装备的研制成本,缩短研制周期,提高科研效率,并为武器的生产制造提供安全保障。
得益于仿真技术的发展,基于模型的系统工程设计思想,可以建立防空高炮系统的全系统仿真模型,利用计算机技术建立可以对防空高炮武器进行设计、研制、实验和评估的集成化虚拟环境[2-3]。利用基于模型的防空高炮武器总体仿真系统,可以改进武器系统的需求论证,评估军事对抗体系中防空高炮武器的作用和效能,以军事需求指导武器系统的战术、技术指标。同时由于防空高炮武器本身的复杂性和传统实验条件的限制,采用基于模型的系统仿真能够更加有效地对防空高炮武器的总体设计中性能要求和指标评估进行科学分析,大幅提升武器的研制效率[4]。
为此,笔者运用基于模型的系统工程设计思想,使用面向对象的软件开发环境,设计了通用防空高炮武器总体仿真系统。通过对各分系统模块进行理论建模和程序仿真,以模型基线取代文档基线[5],并对各分系统进行联调测试,实现各分系统模块数据流互通,并能够对模型数据进行理论分析,完成对防空高炮武器的整体性能评估,以系统论证、设计、测试、保障的数字化,为武器系统的全寿命周期管理和后续型号改进奠定模型基础。
1 系统总体设计
建立基于模型的防空高炮武器仿真系统的首要任务是从总体角度出发,对系统进行总体设计,采用基于模型的模块化设计思想,构建模块互联互通的总体数字样机仿真系统[6]。对防空高炮武器的总体仿真框架进行梳理,有利于在逻辑上打通作战流程,明确各个分系统模块的功能和状态,缩短武器研发周期,设计对应的系统数字样机。
1.1 仿真总体架构
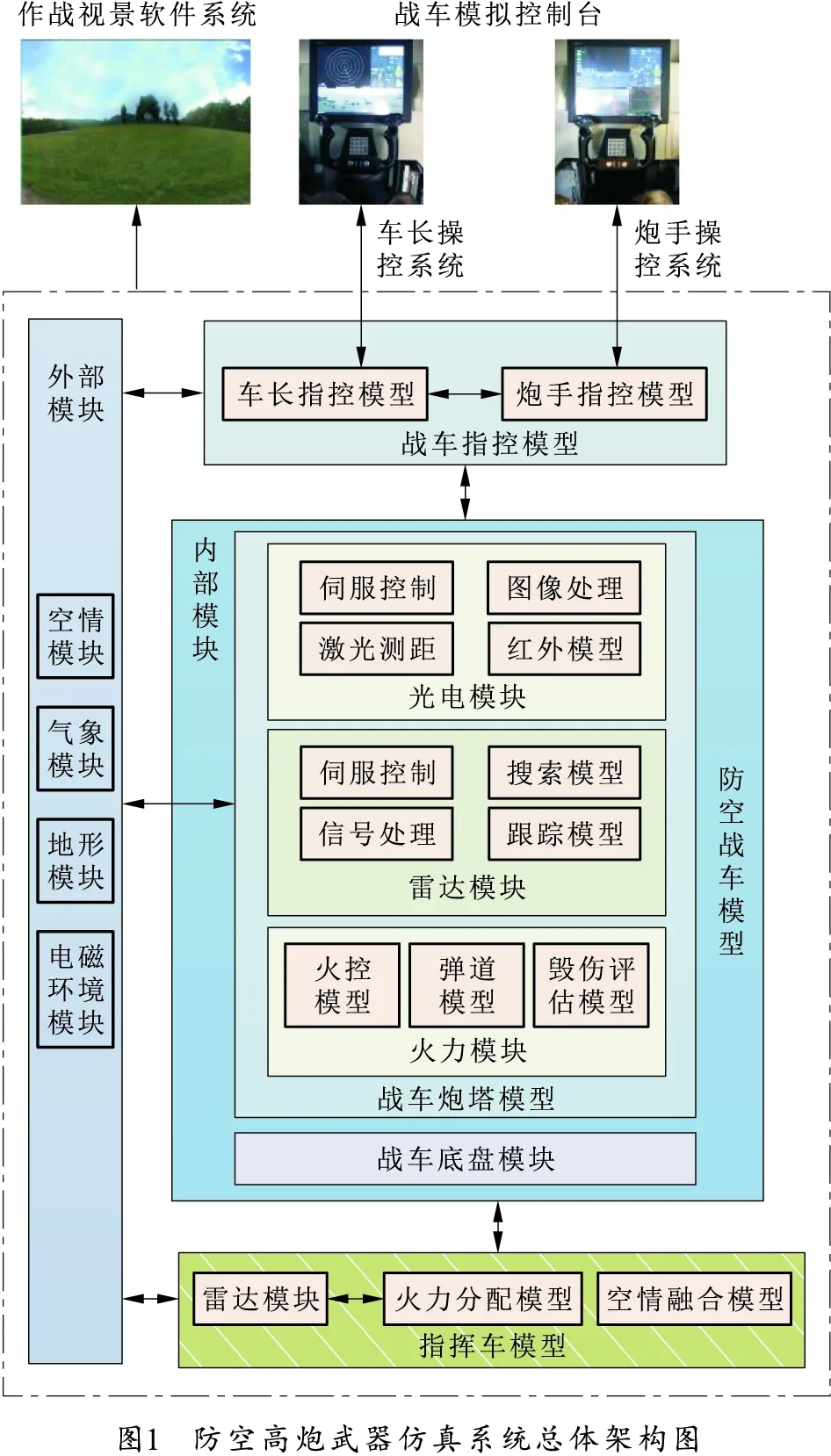
根据防空高炮武器的典型作战任务流程,可以将仿真模块分为外部模块和内部模块两部分。外部模块主要包括跟作战环境相关的模块,用来全面系统地模拟虚拟的战场环境。内部模块则根据防空高炮武器的作战流程,梳理各个子模块的数据流关系,并考虑武器模型与外部环境的互动,形成完整的虚拟作战仿真。防空高炮武器仿真系统的总体架构图的梳理如图1所示。
1.2 仿真基础设备
设计防空高炮武器的数字样机及构建各层级的仿真模型,对于武器系统研发至关重要。可靠的仿真基础设备和软件系统则是完成各种仿真实验的必要条件。
目前,防空高炮武器的各层级仿真,主要采用了银凯公司开发的3D视景展示软件系统以及美国ADI(Applied Dynamic International)公司的ADEPT 10.0实时仿真模型部署软件。前者提供体系级仿真的想定设置、环境仿真、战场模拟、战术验证和3D视景展示;后者运行武器系统级仿真模型源代码,为仿真实验提供模型数据驱动。仿真系统的硬件设备架构如图2所示。
3D视景展示软件系统运行在视景图形工作站上。实时仿真模型部署软件运行在安装QNX硬件实时操作系统的实时仿真机上(主次仿真节点)。此外,体系级仿真硬件配备了高亮度投影仪和综合信息显示屏用来显示3D仿真场景,以及仿真操控台为人在回路的仿真提供操作设备。仿真控制与监控机运行ADEPT 10.0软件,用来把武器系统级仿真模型部署到仿真节点,监控、采集仿真数据流、控制仿真进程。

2 系统功能模块设计
系统功能模块设计旨在通过对总体设计中的各个分系统模块进行数学建模与仿真,构建包含几何信息、材料信息、结构信息、动力学信息、用电功耗信息等全面化数字模型样机,用以分析和评估武器系统的功能和性能,从而为实物样机的设计和研制提供模型参考和数据支撑,有效提高研制效率[7-8]。在实施过程中,可以首先对系统的各模块进行需求和功能分析,构建相应的数学模型,在此基础上分析各仿真模块的性能,评估防空高炮武器系统的整体作战效能。
2.1 系统架构
2.1.1 外部模块
外部模块主要提供作战想定仿真的虚拟环境。主要包括空情模块、气象模块、地形模块和电磁环境模块等。虚拟作战环境越贴近现实战场环境,则仿真的可信度越高[2]。
1)空情模块主要用来生成假想作战对象及其飞行路线、参数。结合防空高炮武器的作战使命和任务,防空作战目标主要包括巡航导弹类、中小型战术无人机、武装直升机和固定翼飞机。空情模块输出数据包括:目标类型,敌我属性,空间坐标,运动特性,结构几何特征,雷达散射截面,红外辐射特性等。
2)气象模块主要用来模拟真实的气象环境,并对战车模型在各种气象条件下的作战模拟提供外部环境支持。包括大气密度对弹道的影响,能见度对光电系统的影响,风速条件下弹道的修正,太阳位置对作战战术的影响等。气象模型输出数据包括:大气密度分布,风速,温度,湿度,能见度,太阳位置等。
3)地形模块主要模拟真实战场环境的地形变化,对防空战车在不同地形下的作战模拟提供地形环境支持。包括起伏地面俯仰状态下随动的控制,地面行进状态下射击等。地形模块输出为三维虚拟地形数据。
4)电磁环境模块主要模拟真实战场的复杂战场电磁环境,及各种无源电磁干扰和有源电磁辐射对战车用频设备的影响。包括敌方频谱压制、战场箔条干扰、有源诱饵、拖曳式无源诱饵、地海杂波干扰、我方用频干扰等。
2.1.2 内部模块
内部模块主要模拟防空火炮本身各分系统模块功能和模块之间的数据交互。主要模块包括雷达模块、光电模块、火控模块、随动模块和火力模块等。每个模块均有数学模型用于原理和功能仿真,同时规定了规范的输入、输出数据接口,以便于各模块之间的数据流贯通和系统误差分析。
1)雷达模块根据功能分为搜索雷达和跟踪雷达模块。搜索雷达模块主要用来在大范围内探测空情目标信息,并进行敌我识别,掌握空情态势。战车跟踪雷达接收搜索雷达的目标指示信息,对交战目标进行进一步的截获和跟踪[9]。在仿真时,根据搜索、跟踪雷达性能,配置相应的仿真模块参数,包括:方位、俯仰扫描范围,方位角、高低角误差,扫描转速,雷达高低、方位波束宽度,最大、最小探测距离等。搜索雷达模块接收数据应包括:空情目标位置,目标散射截面积。搜索雷达模块输出数据应包括:目标方位角,目标高低角,目标距离,信噪比。跟踪雷达模块接收数据包括:搜索雷达指示的目标方位角、高低角、目标距离。跟踪雷达模块输出数据包括:精确度更高的目标方位角,目标高低角,目标距离,信噪比。
2)光电模块主要辅助雷达完成截获、跟踪、低空补盲,具备对空、对地作战功能。需要根据光电系统具体性能配置相应仿真模块参数,包括:最大、最小探测距离,方位角、高低角范围,跟踪最大加速度,跟踪误差等。光电分系统接收数据包括:跟踪雷达或搜索雷达指示的目标方位角、高低角。光电分系统输出数据包括:目标图像,目标方位角、高低角,激光测距目标距离。
3)火控模块根据指挥车搜索雷达信息、跟踪雷达信息和光电模块信息,对威胁目标的信息进行融合[10],得到准确的目标信息(方位角、俯仰角、斜距离、目标速度、雷达散射截面等)。根据防空战车的防区划分以及毁歼概率来确定采用不同火力模块对目标进行拦截,并根据目标飞行轨迹,对目标未来点或火力前置点进行解算,控制对应的随动系统指向目标未来点或火力前置点。火控系统接收数据包括:跟踪雷达指示目标方位角、高低角和距离,光电系统指示目标方位角、高低角和距离,底盘系统提供的自身位置和俯仰状态。火控系统输出数据包括:目标未来点,目标方位角、高低角和距离融合信息。
4)随动系统控制火力炮台的方位角、火力线的高低角,以实现火力线的随动追踪[11]。可根据随动系统的相关参数,比如跟踪速度、跟踪加速度、运行范围、转动惯量、摩擦力矩等,来配置随动仿真模块。随动系统接收数据包括随动主令、速度和加速度信息。随动系统输出数据包括:随动控制炮台的方位角、火力线的高低角和跟踪误差等。
5)火力模块应根据所采用的火炮类型,对应配置相关的火炮仿真模块参数,包括弹药的弹形系数、质量、炮弹初速等,如采用精确制导弹药,则应配置相应的空气动力参数、导引方式参数。如果采用非制导炮弹,则可以用质点外弹道方程或射表查询法进行外弹道仿真[12]。如果采用精确制导弹药,则可以用刚体六自由度模型对外弹道进行仿真计算。
2.2 仿真作战流程
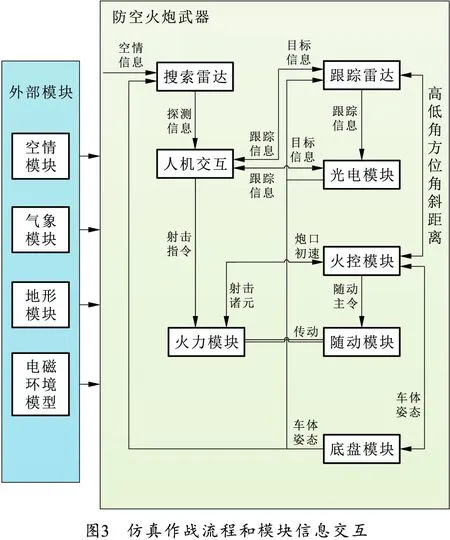
假设空情生成模型产生模拟空中目标参数(方位、距离、高度、速度、航向等),发送到作战视景软件系统、防空战车模型。作战视景软件系统接收空中目标参数后,驱动空中目标三维模型在三维场景中显示。防空战车模型接收空中目标参数后,作为战车雷达模型、光电瞄准系统模型、火炮模型和火控模型的探测源。仿真作战流程的梳理如图3所示。
战车车长和炮手通过战车模拟控制台产生搜索操控指令,控制防空战车模型搜索目标,当截获到目标后,将探测到的目标数据发送到战车模拟控制台显示器显示。同时,战车模型将搜索目标动作参数发送到作战视景软件系统,驱动三维场景中防空战车雷达天线和光电瞄准系统动作,对目标进行跟踪。
火控系统根据目标截面积特性、飞行速度、飞行轨迹等对目标类型进行初步判断。当目标进入防空高炮射击范围时,战车车长和炮手通过战车模拟控制台产生射击操控指令,控制防空战车模型对目标进行跟踪、射击,同时将战车状态信息发送到战车模拟控制台监视器显示。防空战车模型将战车状态信息发送到作战视景软件系统,驱动三维场景中火炮显示射击过程和目标命中情况。当战车模型采用无人在回路的自动工作模式时,战车操控模型自动替代模拟控制台,产生操控指令进行作战。
3 仿真结果展示与分析
在ADEPT仿真平台上对各个仿真模块进行测试和联调,可以实现从空情生成、搜索雷达探测、跟踪雷达截获跟踪[9]、未来点解算、射击诸元解算[10]、随动控制[11]到外弹道计算[12]、毁歼概率计算的模块间数据流贯通,模拟仿真防空高炮武器的作战基本流程。以上作战流程中的各仿真模块均有数学模型对其进行描述,但由于篇幅限制,略去计算过程的表述。使用ADEPT平台的数据采集模块,在仿真过程中采集中间数据并保存,并用第三方仿真分析工具MATLAB对过程数据进行分析、处理和展示。
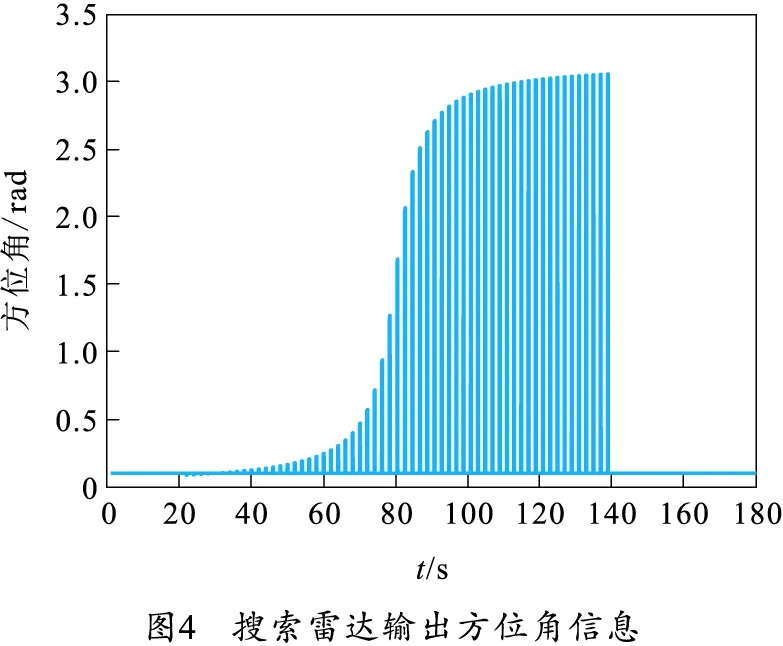
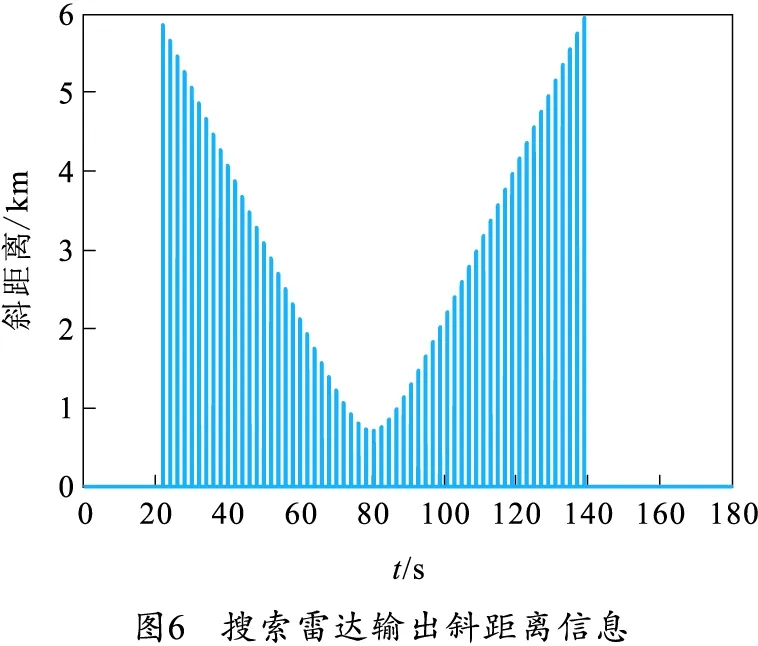
以防空高炮武器对单个空情目标作战为例,对仿真系统部分功能进行展示。选定假想目标初始坐标,设定其飞行方向和速度。火炮位于坐标原点。在仿真过程中,空情生成模块输出目标的实时三维坐标。设定搜索雷达转速、发射机功率、天线增益等仿真参数,在ADEPT实时仿真平台上根据雷达方程进行仿真计算[9],可以得到空情目标的方位角、高低角和斜距离实时检测信息,如图4~6所示。可以看出,搜索雷达虽然探测范围广,但目标位置更新较慢。作战射击时,需要将目标数据传给跟踪雷达,以便截获后实时跟踪目标位置。

跟踪雷达接收搜索雷达提供的目标方位、高低和距离信息,对目标进行截获和跟踪,并将跟踪到的目标信息输出到火控模块。跟踪雷达观测结果(蓝色)和火控输出随动主令(红色)对比如图7所示。横坐标为仿真时间,单位为秒,纵坐标分别为方位角和高低角,单位为密位。可以看出,经过短暂延迟后,火控输出方位和高低角与跟踪雷达的目标数据重合,即炮口开始跟踪目标位置。同时,火控开始解算目标未来点位置,随后火炮口指向目标未来点位置,以便随时根据弹道解算结果进行射击。
根据外弹道仿真模块可以计算不同发射时间的炮弹外弹道轨迹,并与空情目标轨迹进行对比。图8给出了目标与弹道坐标在X方向随时间变化的对比和各次射击的着发毁歼概率。图8中轨迹相交点为理论弹目交汇点。根据火控模块解算,此次仿真中射击窗口理论上有6次射击可以击中目标,但毁歼概率随斜距离而变化,可以用毁歼仿真模块进行预测。
根据仿真运行的弹目交汇预测,毁歼模块可以计算火炮单次发射毁歼概率,并在平台上显示。假设每次发射为独立事件,随目标飞临,毁歼概率增加。毁歼模块此次仿真中单次着发毁歼概率与目标斜距离的关系曲线如图9所示。
4 结束语
建立基于模型的防空高炮武器总体仿真系统,对武器系统研发具有重大意义。在梳理划分武器分系统模块的基础上,通过对各模块进行功能、需求分析和建模仿真,再通过数据流贯通形成武器总体仿真系统,实现了通用防空高炮武器数字虚拟样机设计,对武器系统的整体作战效能评估提供了技术支撑,并对后续装备的维护和升级提供模型和数据支持。笔者主要考虑了系统级的信息流仿真、系统精度仿真、时间特性仿真、系统功能仿真、作战运用仿真,之后可以考虑在此基础上增加结构力学仿真、目标终点效应仿真、电磁环境仿真和错峰供电仿真等。
