基于改进RHT及均值漂移聚类方法的双孢菇图像目标提取研究*
2022-10-27马聪陈学东周慧
马聪,陈学东,周慧
(宁夏农林科学院农业经济与信息技术研究所,银川市,750002)
0 引言
双孢菇又名白蘑菇、洋蘑菇、圆蘑菇,菌肉色质白嫩、口感鲜美、营养丰富,市场消费需求量逐年攀升。双孢菇栽培具有原料多样、环境限制少、收益率高等优势,标准化种植、批量生产成为产业发展的趋势。随着栽培技术和信息技术的发展,工厂化生产菇房已经实现了环境监测及设备调控的自动化或智能化控制,但是双孢菇长势监测及采收等工作目前尚未完全实现无人化[1]。据宁夏某双孢菇生产企业调研,出菇期需要每天专人巡检2~3次,人工记录出菇数量和大小,根据长势统计数据并及时调整环境控制参数;单批次双孢菇采菇时间一般为25~30天,采菇周期1~2天,人均每天采菇约100 kg,盛菇时期每间中等规模的菇房需要15~20人全天采收。人工巡检及采摘的效率无法应对规模化双孢菇生产的需求,且人工成本较高、采收季劳动力缺少等问题也是制约产量提升的因素。因此,研制高效率、高可靠性的智能型长势监测及采收设备十分必要。目标提取是智能设备视觉系统研究的重要内容,通过处理分析采集的图像,去除背景和噪声,准确地提取目标,在此基础上计算目标空间位置、数量、大小等信息,输入系统进行长势监测及预判,或控制末端执行器完成采摘动作[2-5]。双孢菇菌盖整体呈白色,栽培基质呈灰黑色,双孢菇图像中目标颜色与背景颜色存在明显差异。因此,主要采用设置图像灰度阈值的方法,分析蘑菇中心点以及寻找边界,此方法效率高,适用于光照均匀、菌菇生长规则等环境条件[6]。但是在实际生产中,由于管理方法、环境参数等外部条件存在差异性,双孢菇生长过程中还存在菌菇成簇粘连、菌柄倾斜、白色菌丝繁盛等复杂情况,采用常规方法提取目标的结果不佳,无法完全适应实际生产要求,因此需要进一步研究算法以改进完善双孢菇图像的目标提取方法。
本文以工厂化栽培方式的双孢菇图像为对象,采用改进的随机霍夫变换圆形检测算法与滑动平均聚类算法结合的方法,研究实际生产环境下双孢菇复杂图像的目标准确提取和计数。
1 材料与方法
1.1 数据采集
数据采集试验地位于宁夏银川市某双孢菇种植生产基地,该基地安装了远程视屏监测及自动控制系统,可以扩展搭载目标提取及计数算法等程序,实现食用菌无人化巡检和产量动态监控功能,具备将研究结果推广应用的产业基础和软硬件基础。
在实际生产环境下,采集不同菇房、不同生长区域的产菇期的双孢菇原始图像,共500张作为测试样本集。图像采集器分辨率为4 608像素×3 456像素,焦距为3.97 mm,将采集器固定在距离菇床基质面正上方20 cm处,数据采集时通过外置光源补光保证图像清晰。采集目标为菌盖半径范围为1~6 cm的双孢菇,图像包含了菌盖洁净、菌菇均匀分布、菌菇间挤压堆积以及菌丝成片等不同生长情况。
1.2 双孢菇图像目标提取方法
1.2.1 改进随机霍夫变换及均值漂移聚类方法
1) 数据预处理。对采集到的原始图像进行预处理,去除干扰噪声,并将双孢菇图像区域与背景区域分离。图像预处理流程如图1所示。
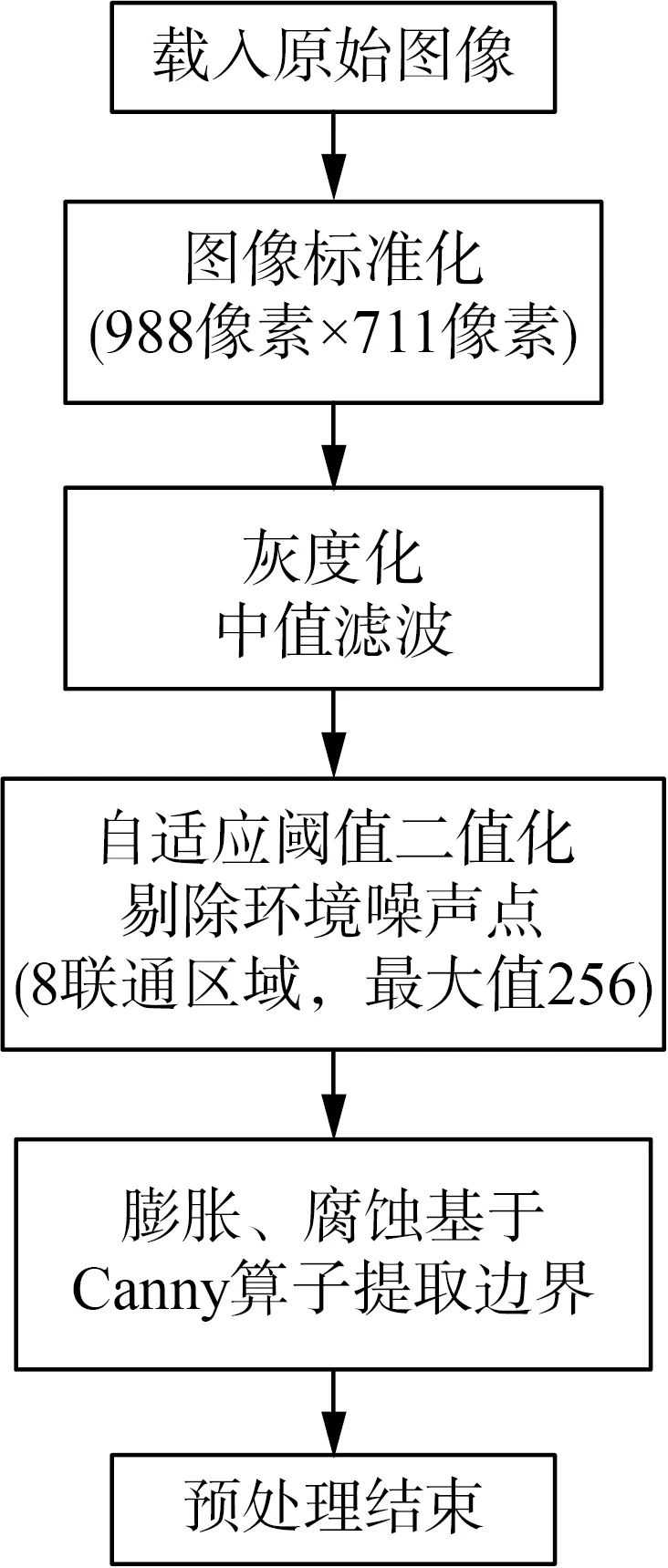
图1 双孢菇图像预处理流程图
图像转换。为提高数据处理效率,将原始图像等比例缩小至标准模式,对标准图像进行灰度化及滤波处理,进一步降低图像干扰并保留目标特征,在此基础上采用自适应阈值方法将图像转为二值化图像。
图像处理。栽培基质与双孢菇的颜色差异较大,按照灰度值提取双孢菇图像目标速度最快,但在实际双孢菇出菇过程中,存在菌盖附着泥土、菌丝面积大于菌菇、蘑菇较大面积堆叠等复杂情况,易影响图像的目标提取结果,需在预处理过程中尽量减少背景中的干扰因素。工厂化条件下同批次蘑菇生长速度差异较小,菌盖半径在可知范围,据此在图像二值化基础上,设置联通区域阈值,删除小于阈值面积的图像点,即可快速地剔除背景中部分干扰性斑块或斑点。对处理后的图像进行腐蚀和膨胀处理,使图像进一步平滑、完整。
2) 改进随机霍夫变换检测圆形。完整的双孢菇菌盖类似于圆形,图像识别算法中通常采用Hough变换方法检测类圆几何形状。Hough变换实质是利用点与线的对偶性转换坐标,将图像空间线条变为参数空间聚集点,计算满足圆参数形式的边界点,判断中心点投票是否达到峰值,以此检测图像内圆形特征边缘。
Hough变换对图像中圆度较好的圆形检测效率较高,但是由于双孢菇图像并非标准的圆形,直接运用Hough变换检测圆形效果不好,且直接应用于多个双孢菇粘连生长或菌丝较多的图像时,Hough变换会产生识别率低、错误率较高等问题。
随机霍夫变换(RHT,Randomized Hough Transform)方法是对Hough变换方法的改进,在图像边缘点集合中随机选取多个点计算圆参数,投票累加至满足阈值时确定目标圆。RHT减少了参与计算的边缘点数量,但是处理复杂图像时,容易产生无效样本累积、虚假圆形过多等问题[7-9]。双孢菇图像具有类圆形目标多、背景干扰多的特点,直接采用RHT方法处理图像效率低、计数不准。
针对上述问题,本文通过改进边缘点取样方式及投票器累加的方法,提高双孢菇外圆的识别能力。将双孢菇边缘曲线看作是由多段曲线片段相接组成,离散化的曲线片段对应在边缘点集合中是不同的分组连续点。随机选取曲线片段进行圆形检测计算,充分利用了双孢菇圆弧形边缘的特点,从而避免整体识别双孢菇非标准外轮廓圆形产生的误识别或遗漏。
本文采用的改进RHT圆形检测方法原理如图2所示。以图像提取后的轮廓构建边缘点集合,以固定间隔长度选取的边缘点进行空间变换,获得圆的半径长度。霍夫变换的坐标系下,圆弧上的连续点表现为点坐标在[rmin,rmax]区间分布。结合图像大小和计算速度对比测试,本文将边缘点集合按照10点一组划分为多组数据。通过多组随机取样,同一圆上的边缘点计算出的圆心位置将指向同一区域,经过霍夫变换计算得到边缘点集合所属的圆心位置或像素点区域。
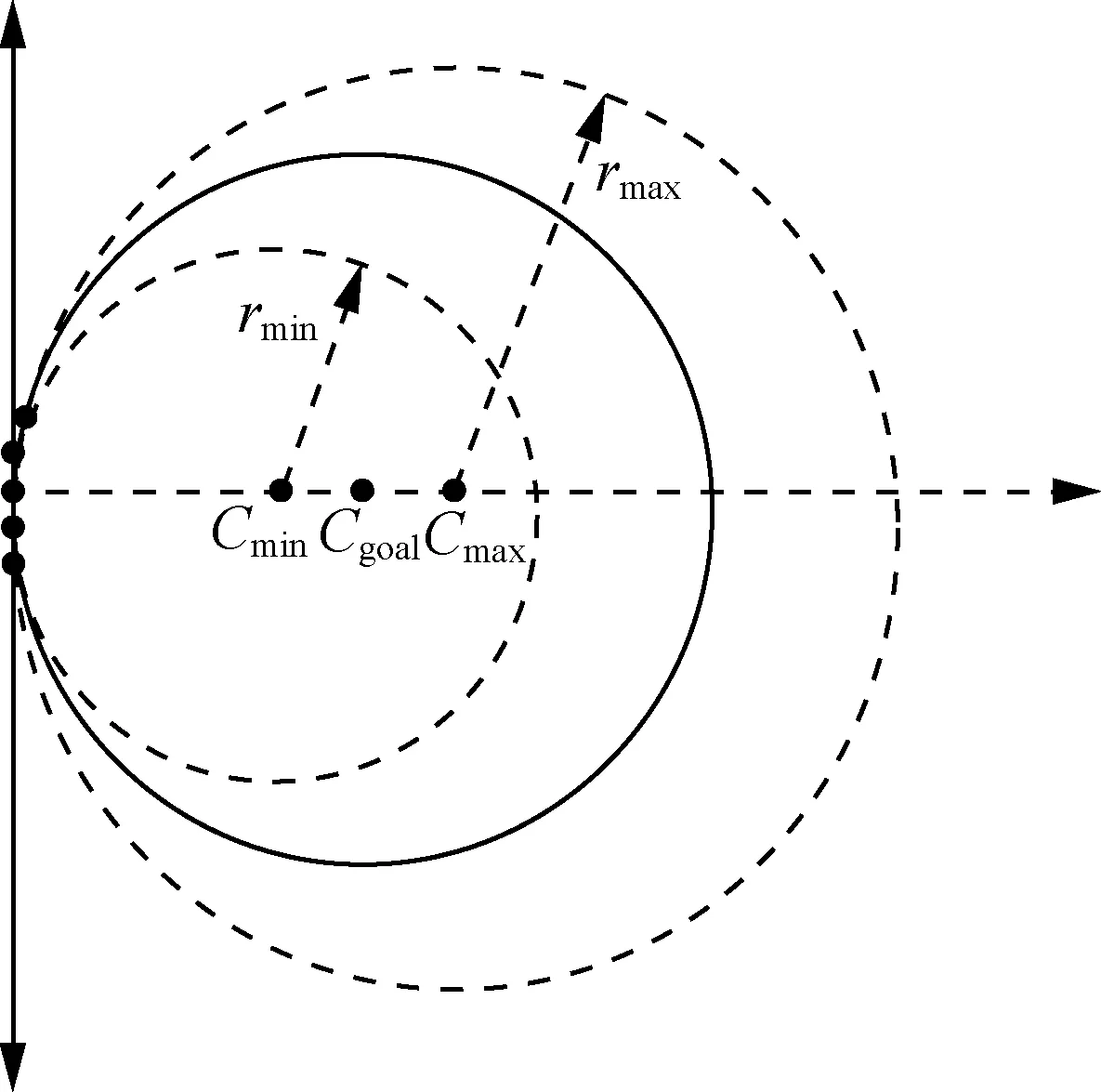
图2 改进RHT圆形检测方法原理
建立投票机制,以霍夫变换确定的圆心点或区域进行投票器累加,计算出累加值最高的圆心C和半径r的位置。以累加值最高的圆形参数作为最终确定圆。剔除半径超出菌盖半径范围的圆形参数,完成圆形识别。
改进RHT圆形检测方法流程如图3所示。

图3 改进RHT圆形检测方法流程图
3) 双孢菇圆形聚类及计数。通过改进的霍夫变换,仍有部分虚假圆的存在,同一双孢菇可能会识别出两个以上的圆形目标。同一双孢菇识别出的多个圆形目标具有圆心坐标相近、圆形面积重合较大的特点,以双孢菇图像检测出的所有圆形为目标,采用均值漂移(Mean Shift)聚类算法合并同类圆形,绘制目标轮廓并计算数量,降低识别错误。
Mean Shift是圆形滑动窗口沿着密度上升方向寻找聚簇点的迭代方法,窗口初始中心点为样本随机点,窗口半径依据样本特征设置,偏移均值是窗口内所有点到中心点的距离向量的平均值,新区域中心点是上一时刻中心点叠加偏移均值后的位置[10-14]。窗口滑动是重复计算均值、中心点移动的过程,通过反复迭代计算不断逼近最佳中心点,当满足预先设置的约束条件时均值漂移结束,聚类完成。Mean Shift优点是不需要预先明确聚类的数量,不限制聚类的形状,受窗口均值影响较小,普适性强,满足本文双孢菇图像目标聚类要求。
本文采用的双孢菇圆形聚类及计数流程如图4所示。对全部聚类后判别为同一个体的蘑菇进行再次判断,设置判断规则,进一步确认聚类是否合理。判断规则是根据圆形检测与原图对应分布特点设计:聚类圆形内存在背景色较多(二值化后黑色区域大于50%),认为是背景纹理产生的虚假圆形,不计入目标轮廓(圆弧投票产生的误识别);聚类在一起的圆形边缘包含多个角点,认为是多个小面积圆形相接的效果,各圆形分属于不同目标轮廓,不能聚类成为一个目标。聚类判断完成后,完整提取聚类后目标边缘,统计图像内封闭曲线数量作为双孢菇计数结果。
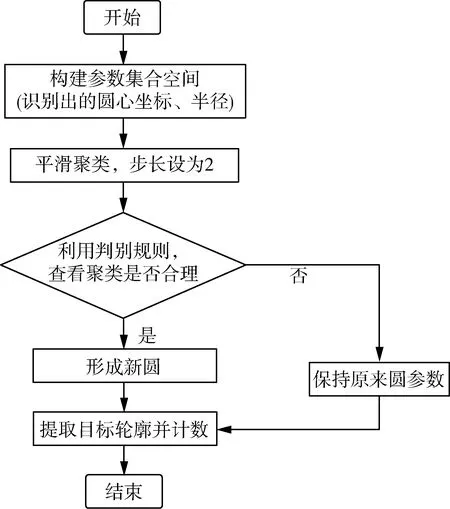
图4 双孢菇圆形聚类及计数流程图
1.2.2 对比方法
通过对双孢菇图像目标识别及分级等相关文献资料分析,目前双孢菇识别主要采用阈值分割、分水岭算法等方法处理双孢菇图像。为对比验证本文改进RHT及均值漂移聚类方法识别效果,采用全局阈值分割与分水岭算法提取相同图像数据,对比算法结果。
全局阈值法是通过反复迭代计算后得到图像最佳分割阈值的方法。基本计算流程:初始化,计算双孢菇图像的平均灰度值T0,作为图像分割的初始值,分割图像:图像分割,计算大于T0的像素点集合的平均灰度值g1,计算小于等于T0的像素点集合的平均灰度值g2;阈值计算,计算g1、g2平均值,作为分割阈值新值T1。多次重复图像分割、阈值计算的步骤,当分割阈值新值之间的差小于5即认为获得最佳分割阈值T,停止计算。
将双孢菇图像转为灰度图,对灰度值大于T的像素点赋值1,其他像素点赋值0。将0值区域标记为图像背景,通过计算从灰度图像中去除背景点,获得目标区域图像。
对已提取的图像区域采用标记符控制的分水岭算法提取目标。基本计算流程:对提取的图像区域灰度化并进行滤波,获得处理图像;采用分水岭算法对图像变换,得到带有区域标记的图像;符合双孢菇面积的独立或近似独立区域识别为目标,较大区域以外侧随机点为起始点并获取该点区域的标记值(N),将与起始点区域连通的标记值为[N-1,N+1](双孢菇中心亮度与边缘差异值统计值差值为1)区域与起始区域合并,计算为识别目标。去除识别目标后迭代识别后续目标。
2 结果与分析
2.1 改进随机霍夫变换及均值漂移聚类方法目标提取结果
2.1.1 双孢菇图像预处理
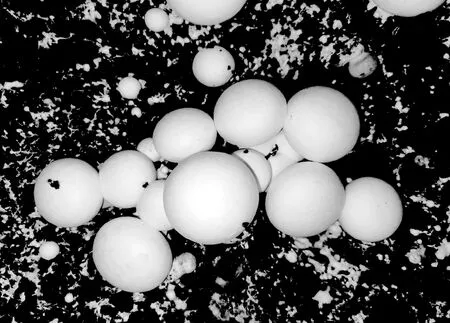
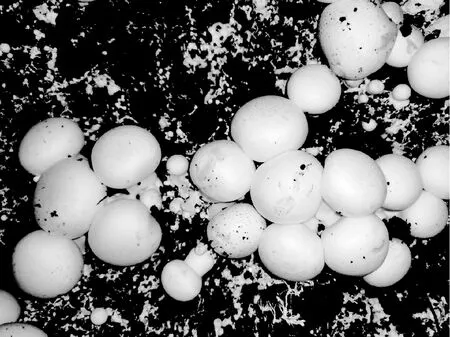
本文分别选取了双孢菇出菇过程中呈现的规则、边缘粘连、堆叠等生长不同状态的图像,作为本文算法应用示例。图像原图及预处理结果如图5~图7所示。

(a) 原图
(a) 原图
(a) 原图
预处理后的图像,去除了部分菌丝干扰,目标边缘轮廓清晰。提取所有边缘点构建点集合,作为后续圆形检测的基础。
2.1.2 基于改进随机霍夫变换的双孢菇图像圆形检测结果
基于改进RHT方法检测双孢菇图像中的圆形目标,处理结果如图8~图10所示。
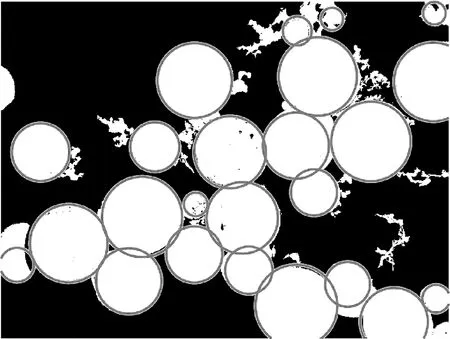
图8 规则生长状态双孢菇图像圆形检测结果

图10 菌盖变形状态双孢菇图像圆形检测结果
通过圆形检测结果可以看出:对于边缘清晰、菌盖间有间隙或堆叠、背景干扰少、菌菇直立的双孢菇图像,采用改进RHT方法可以快速、准确地提取出双孢菇菌盖轮廓;对于存在菌柄倾倒、大片菌丝、菌盖堆积严重等情况的复杂图像,提取结果出现了菌柄或菌丝被识别为圆形的现象。因此在圆形检测基础上,本文采用聚类分析方法进一步处理圆形提取结果。
2.1.3 双孢菇图像圆形聚类结果
以改进RHT的双孢菇图像圆形检测结果为基础进行平滑聚类计算,目标圆形聚类结果如图11~图13所示。

图11 规则生长状态双孢菇图像目标提取结果

图12 粘连生长状态双孢菇图像目标提取结果

图13 菌盖变形状态双孢菇图像目标提取结果
对比圆形检测与聚类目标提取结果可以看出:对于边缘清晰、菌盖间有间隙或堆叠、背景干扰少、菌菇直立的双孢菇图像,目标提取结果一致;对于存在菌柄倾倒、大片菌丝等情况的复杂图像,属于同一双孢菇菌盖的不同圆形聚类合并成同一目标,菌柄和菌丝被检测出的圆形没有划为目标轮廓。
2.2 对比方法目标提取结果
采用全局阈值与分水岭算法结合的方法提取双孢菇图像目标,以不同颜色及对应数字标注出双孢菇目标,处理结果如图14~图16所示。

图14 规则生长状态双孢菇图像对比算法提取结果

图15 粘连生长状态双孢菇图像对比算法提取结果
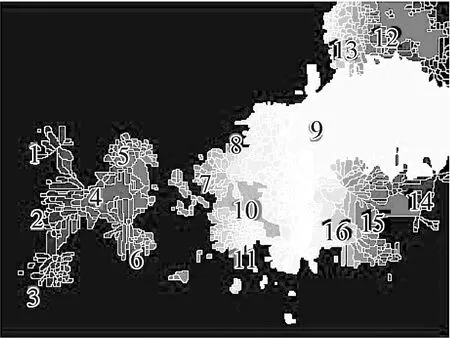
图16 菌盖变形状态双孢菇图像对比算法提取结果
通过提取结果可知:分水岭算法分割图像的结果整体不佳,对于边缘紧密相接或者堆叠状态的双孢菇目标几乎无法分割。图像灰度值是分水岭算法分割准确性的关键因素,在图像分割过程中出现误差的主要原因:当菌盖边缘与中间部位颜色略有差别时,采用分水岭算法易出现过度分割、同一目标被划分为不同区域的结果;当菌盖粘连较多、不同菌菇图像颜色接近时,采用分水岭算法易出现多个目标被分割成同一区域的结果。
2.3 结果与分析
为验证本文研究方法的可用性和有效性,随机从样本集中选取双孢菇图像80张。人工标注并统计每张图像内半径大于20像素的双孢菇数量,分别采用改进RHT及均值漂移聚类方法、对比方法处理双孢菇图像自动提取双孢菇轮廓及数量。以人工识别计数的结果作为评定标准,统计各方法的提取正确率。采用不同方法提取目标的结果见表1。

表1 不同方法的目标提取结果Tab. 1 Object extraction results of different methods
通过自动识别计数结果与标准对比可知:采用改进RHT及均值漂移聚类方法,单张图像的识别正确率最低为82%、最高为100%,图像识别平均正确率为96%;采用全局阈值与分水岭方法,单张图像的识别正确率最低为50%、最高为90%,图像识别平均正确率为68%。本文采用的方法针对复杂双孢菇图像的目标提取正确率显著高于对比方法,更适用于实际生产过程。
在此基础上,针对改进RHT及均值漂移聚类方法的提取结果进行分析。按照双孢菇生长分布特点将测试图像分为4类,分别统计每类图像的平均正确率,计算结果见表2。

表2 本文方法目标提取结果Tab. 2 Target extraction results of the method in this paper
通过提取结果分析,本文采用的方法识别正确率与目标生长状态的复杂程度紧密相关。根据图像的识别正确率是否大于90%,将出现误差的测试图像分为两类。
1) 菌菇均匀分布、菌盖少量附土、菌盖间少量堆叠或变形较小等状态的双孢菇图像,图像预处理能去除大部分背景干扰因素,改进RHT可以快速、准确地检测出大部分类圆目标轮廓,Mean Shift处理能正确地合并同一双孢菇的圆形、剔除误识别虚假圆形,算法处理速度较快,此类图像目标提取正确率均大于92%。
2) 大面积菌丝包围菌菇、菌菇成簇倒伏、不同菌菇的菌柄倾斜交错、不同规格的菌菇密集掺杂、菌盖相互堆积或严重挤压变形等状态的复杂双孢菇图像,改进RHT和Mean Shift处理过程中存在不同程度的目标误判和漏判,此类图像目标提取正确率最低为82%。
分析处理过程数据可知,目标提取出现错误的主要原因是圆形检测不准确。
1) 双孢菇轮廓被挤压变形或与多个双孢菇边缘粘连。菌盖变形后边缘处于不规则形状,圆弧片段少、与圆形差距大,目标边缘点集通过霍夫变换后参数投票数不满足设置值,圆形检测失败。因此此类双孢菇在圆形检测无法检出,出现目标漏判。
2) 成簇菌柄倾斜、菌丝与双孢菇粘连。边缘点集中任意点(xi,yi)对应在a-b-r坐标系中是一个圆,同一个双孢菇边界的点在a-b-r坐标系中是多个相交圆,圆形数量最多的交点是最终圆心。当不同目标的边界粘连,粘连处弧线段上的点分别与不同边界点所属圆形相交,圆心投票数满足设定阈值时划分点集所属目标。因此多个双孢菇边界粘连时,处于中间位置的双孢菇所属弧线段的圆心投票数小于其他目标获得的投票,此类目标均被划为其他双孢菇范围,出现目标漏识别。
3 讨论
本文提出的算法具有实用性,可将算法嵌入在智能控制系统中,满足工厂化菌菇生产过程中长势自动监测、出菇统计、预测预警等需求。通过算法处理识别计算出的图像中各双孢菇中心点位置,基本处于菌盖中心区域范围,目标轮廓曲线与菌盖边缘基本吻合,因此可将计算出的中心和边缘参数作为采摘机器人末端执行器运动数据基础,为自动采摘目标抓取提供数据支撑。在生产销售环节,双孢菇按照菌盖半径分为不同等级商品,采摘后需要人工二次分选,存在增加劳动量、菌菇磕碰的问题,可在本文目标提取基础上,结合立体定位技术,进一步研究基于图像的动态快速分级方法,驱动采摘机器人按照设定尺寸分级采摘,提高采收效率。
4 结论
本文采用改进的RHT与Mean Shift结合的方法研究了双孢菇图像目标提取和计数,通过对目标圆形检测及聚类,实现对双孢菇轮廓的准确提取和数量检测,对于规则图像的提取正确率达到92%,对于复杂图像的提取正确率达到82%,采用的算法数据处理量小、计算速度快、适应性强。根据实际生产过程调研反馈,针对复杂状态的双孢菇图像,轮廓识别和计数正确率大于80%时,即可满足长势动态监测、日常巡检和趋势预测的统计需求,因此算法提取结果可满足应用实际要求。针对复杂图像出现的部分提取不准确的问题,在后续研究中将通过改造图像采集设备、优化自适应算法等方法进一步提升目标提取正确率。