行星齿轮箱太阳轮轴承外滚道故障特征增强研究
2022-10-27熊晓燕牛蔺楷谢宏浩郑一珍祁宏伟
肖 飞, 熊晓燕,2, 牛蔺楷,2, 谢宏浩, 张 炜, 郑一珍, 祁宏伟
(1. 太原理工大学 机械与运载工程学院,太原 030024;2. 太原理工大学 新型传感器与智能控制教育部重点实验室,太原 030024)
由于结构紧凑,传动比大,噪音低等优点,行星齿轮系统广泛用于许多工业应用中。但是由于行星齿轮箱结构复杂并且工作环境复杂恶劣,容易造成内部部件发生故障。特别是当轴承与齿轮发生复合故障时,由于轴承故障特征信号相对于齿轮故障特征信号较小,容易被齿轮故障信号淹没。因此,对行星齿轮箱太阳轮-轴承外滚道复合故障进行动力学建模,研究其动力学响应具有重要意义。
国内外许多学者对行星齿轮系统动力学建模做了很多研究。Kahraman等[1]分别建立了单级行星轮系的纯扭转模型以及非线性时变动态模型,并得到了系统扭转固有频率的方程与行星齿轮系统的均载特性; Inalpolat等[2]基于行星齿轮系统模型和试验分析研究了行星齿轮组的调制边带;Eritenel等[3]建立了有限元/接触力学模型,研究了不同转速和扭矩条件下行星齿轮系统的动态响应;Chaari等[4]建立了基于变刚度的行星齿轮系模型,对太阳轮裂纹与点蚀故障的频谱边带特性进行了研究。孙智民等[5]考虑了行星架的弹性变形,轮系的弹性耦合和负载惯性,建立了封闭行星齿轮传动系统的动力学计算模型。并用数值解法获得了系统在时变啮合刚度和齿频综合误差激励下的动态响应;孙涛等[6]考虑行星齿轮传动系统的刚度波动,推导了行星齿轮系统微分方程组的解析谐波平衡法。并通过算例得到了行星齿轮传动的非线性频响特性,研究了时变啮合刚度、误差和齿侧间隙对系统非线性动力学行为的影响;Zhao等[7]考虑摩擦力和分形接触理论,建立了较为全面的齿轮啮合刚度模型,分析了摩擦因数和分形参数的函数关系。Xiang等[8]针对齿轮剥落故障的多级齿轮系统,建立了多级齿轮系统的侧向扭转动力学模型。基于改进的能量法,建立了齿轮剥落故障的计算模型,分析了齿轮剥落故障对时变啮合刚度的影响。
另一方面,大量的学者对于滚动轴承的动态行为也进行了研究。Gupta[9]提出了最具代表性的轴承动力学模型之一,该模型中每个轴承元件均具有6个自由度以完整地描述轴承元件的三维运动。牛蔺楷等[10-12]基于Gupta的研究,建立了许多轴承动力学模型来对轴承的局部损伤、润滑以及保持架不平衡等问题进行研究。随着有限元技术的发展,越来越多的学者通过有限元的方法对轴承进行了研究。Laniado-Jácome等[13]提出一种用于模拟滚动轴承的有限元模型,并与Harris-Jones提出的模型进行对比,得到轴承有限元模型的承载区域实际上并不是对称的结论。Singh等[14]提出了具有外滚道表面损伤的滚动元件轴承的动态非线性有限元模型,该模型可用于研究具有复杂几何形状表面缺陷的轴承的振动特性。Wen等[15]用几何约束关系对缺陷进行建模,取代了以往研究中提出的激励函数,建立了表面缺陷的角接触球轴承完整的多自由度动力学模型。通过对高速工况下轴承动力学响应的分析,揭示了不同尺寸和位置角的外滚道缺陷对轴承动态特性的影响。
虽然已经有大量的学者对行星齿轮箱以及滚动轴承的动力学模型进行了研究,但是对于太阳轮与太阳轮轴承复合故障的动力学响应的研究较少。由于行星齿轮箱中的太阳轮轴承与太阳轮有着强烈的耦合作用,导致太阳轮轴承的故障信号容易被太阳轮故障信号淹没。课题组试验表明,在太阳轮与太阳轮轴承外滚道同时发生故障的情况下,从包络谱中无法找到明显的轴承外滚道缺陷特征频率。因此,为了在强大的太阳轮故障信号的背景下高效提取微弱的轴承故障信号,有必要从故障机理的角度对太阳轮断齿-太阳轮轴承外滚道缺陷复合故障进行研究。
本文提出一种带有太阳轮轴承的行星齿轮箱刚-柔耦合动力学模型。该模型将箱体、轴承外圈以及齿轮轴柔性化,考虑了轴承的径向游隙与兜孔间隙,轴承保持架与滚动体保留6个自由度。利用该模型对太阳轮轴承外滚道缺陷以及太阳轮断齿进行建模,并对动力学响应进行时域和频域分析。最后,基于该模型分析太阳轮轴承表面损伤难以通过频谱分析进行诊断的原因。提出了太阳轮轴承外滚道缺陷特征增强的方法,并在仿真与试验中得到验证。
1 刚-柔耦合模型的建立
本研究需要考虑太阳轮与太阳轮轴承的耦合作用,以及齿轮箱箱体上不同位置的响应。因此纯刚性模型不能满足研究的要求,需要将弹性变形对系统有较大影响的一些部件设置为柔性体。
1.1 行星齿轮箱三维模型的建立
本文以如图1所示的行星齿轮箱综合故障模拟试验台为研究对象建立模型。该行星齿轮箱为单级行星齿轮箱,其中内齿圈固定,太阳轮输入,行星架输出。齿轮以及太阳轮轴承相关参数如表1和表2所示。其中太阳轮轴承为6212深沟球轴承,轴承保持架为浪型保持架。
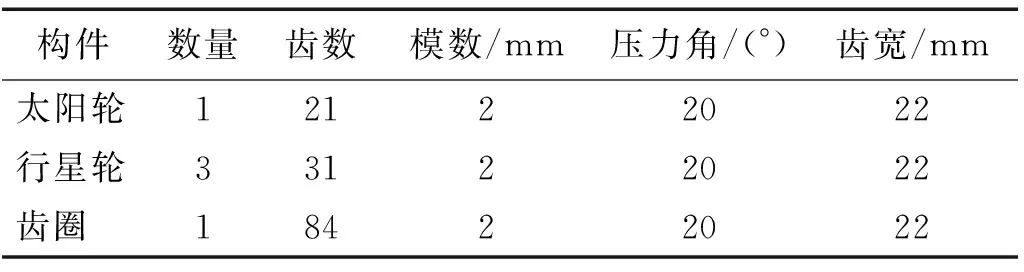
表1 齿轮相关参数Tab.1 Gear related parameters
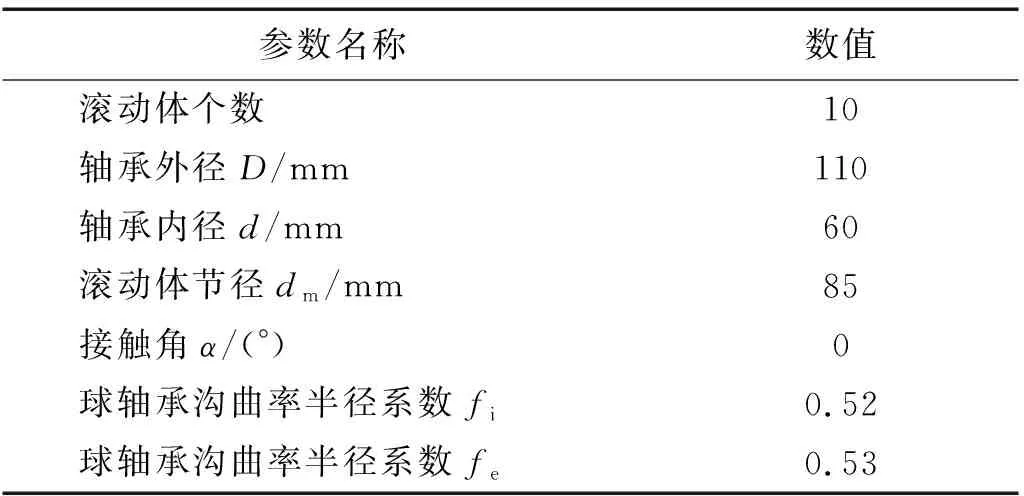
表2 太阳轮轴承相关参数Tab.2 Sun gear bearing related parameters
本文根据上述行星齿轮箱参数建立三维模型,其爆炸图如图2所示。
对于轴承局部表面损伤,将轴承内外滚道局部表面损伤故障表面轮廓建模为矩形[16]。其中:L为矩形表面损伤的长度;B为矩形表面损伤的宽度;H为缺陷的深度,如图3(a)所示。而太阳轮齿轮局部损伤建模为断齿,如图3(b)所示。
1.2 行星齿轮箱刚-柔耦合模型的建立
为了考虑齿轮啮合与轴承的耦合作用,有必要对太阳轮轴与行星架轴以及轴承外圈连同箱体进行柔性化处理。本文在ANSYS中创建柔性体,选择SOLID187进行网格划分。通过输出模态中性文件(MNF)来完成柔性体的创建。
将实体模型导入到ADAMS中,设置材料属性,并将柔性化部件用相应MNF文件进行替换。在ADAMS中按照实际的传动关系对行星齿轮箱中各个构件施加约束:①输入轴与大地之间施加旋转副;②太阳轮与输入轴之间施加固定副;③轴承内圈与输入轴之间施加固定副;④箱体与大地之间施加固定副;⑤输出轴与大地之间施加旋转副;⑥输出轴与行星架之间施加固定副;⑦行星架与行星轮之间施加旋转副;⑧分别在太阳轮与行星轮、行星轮与内齿圈、轴承滚动体与轴承内外圈之间添加接触;⑨分别在太阳轮轴添加驱动,在行星架轴添加负载。
1.3 参数的设定
行星齿轮箱通过齿轮啮合以及轴承滚动体与轴承套圈的接触来实现动力与运动的传递。在ADAMS中,利用Impact函数来计算2个构件之间的接触力。Impact函数的定义为
(1)
式中:K为接触刚度,N/mm;x1为碰撞过程中两物体的初始距离,mm;x为碰撞过程中两物体的实际距离,mm;e为非线性指数;C为阻尼系数,N·s/mm;d为击穿深度,mm。
接触刚度的计算公式定义为
(2)
行星齿轮箱各构件相关材料参数如表3所示。
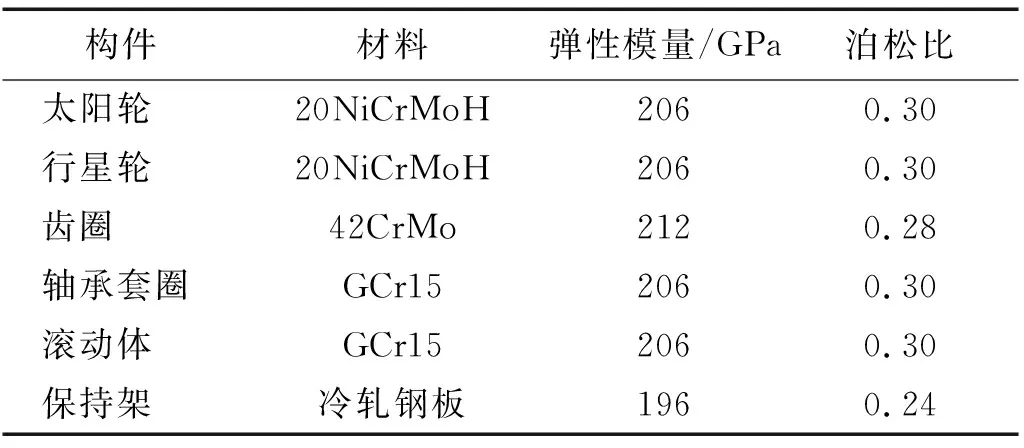
表3 行星齿轮箱参数Tab.3 Material parameters of compound planetary gear box
仿真求解器选择NEWMARK,积分误差设定为1×10-9,以提高计算的准确性。仿真时间为5 s,仿真步数50 000。通过阶跃函数定义的扭矩STEP(time,0,0,0.1,-10 000)将-10 000 N·mm的负载扭矩施加在输出轴上,同时由驱动STEP(time,0,0d,0.1,10 800 d),施加1 800 r/min的转速在输入轴上。建立的刚-柔耦合动力学模型如图4所示。
2 试验验证
为了验证构建的动力学模型的正确性,为后续的轴承特征增强方法提供基础,本章首先将仿真分析与试验的振动响应的包络频谱进行比较。本文仿真信号的幅值单位为mm/s2,试验信号的幅值单位为mV。由于本文主要关心包络谱中存在哪些特征频率,而不关心其具体幅值的大小,因此本文的包络谱中幅值均为归一化处理后的无量纲幅值。
行星架转频fcarrier、齿轮啮合频率fm以及太阳轮故障特征频率fsun的表达式分别为
(3)
(4)
(5)
式中:Zr为内齿圈的齿数;Zs为太阳轮的齿数;fs为太阳轮转频,Hz;N为行星轮个数。
太阳轮轴承外滚道故障特征频率fo如式(6)所示
(6)
式中:n为滚动体个数;d为轴承内径,mm;dm为轴承节圆直径,mm;θ为接触角。
在输入转速为1 800 r/min条件下,该行星齿轮箱的主要特征频率如表4所示。

表4 行星齿轮系统主要特征频率Tab.4 Main characteristic frequency of planetary gear system Hz
本文分别对健康齿轮箱、轴承外滚道表面局部损伤、太阳轮断齿分别进行仿真与试验。轴承外滚道表面损伤尺寸为L=0.5 mm,B=1.6 mm,H=0.3 mm,太阳轮故障为断齿。
其中轴承的外滚道损伤与太阳轮断齿实物图,如图5所示。
2.1 健康齿轮箱分析
健康齿轮箱的振动信号包络谱如图6所示。在图6(a)可以找到齿轮啮合频率fm及其倍频以及行星架转频fcarrier及其倍频。同时在局部放大图6(c)中,可以找到啮合频率受到行星架转频以及太阳轮转频调制的边频带fm±fcarrier,fm±2fcarrier,fm±3fcarrier,fm±fs。对于仿真信号图6(b)、图6(d)同样可以准确找到上述的特征频率。
2.2 太阳轮断齿局部故障分析
太阳轮断齿局部故障的包络谱如图7所示。图7(a)与图7(b)中均能找到太阳轮故障特征频率fsun及其倍频,以及齿轮啮合受到齿轮故障调制的边频带fm±fsun。
2.3 太阳轮轴承外滚道表面局部损伤分析
外滚道表面损伤仿真信号与试验信号的包络谱,如图8所示。在图8(a)与图8(b)中均能找到轴承外圈故障特征频率fo及其倍频,以及fo及其倍频受到太阳轮转频调制的边频带fo±fs,2fo±fs,3fo±fs。
由于健康齿轮箱以及轴承外滚道缺陷、齿轮断齿情况下仿真得到的包络频谱与试验结果均有较好的对应关系,因此该模型可以用于行星齿轮箱太阳轮轴承外滚道故障特征增强研究。
3 复合故障下轴承外滚道故障特征增强研究
对于太阳轮断齿-轴承外滚道缺陷复合故障,由于轴承外滚道早期故障,局部损伤尺寸较小,在包络谱中难以找到轴承外滚道故障特征频率。如图9所示,当轴承外滚道缺陷尺寸为L=0.4 mm,B=0.6 mm,H=0.2 mm,太阳轮为断齿时,在试验信号的包络谱中可以找到齿轮故障特征频率fsun,但是轴承外滚道故障特征频率fo被太阳轮故障信号掩盖。因此对于复合故障,不能通过简单的频谱分析来对轴承故障进行诊断。本文从太阳轮轴承与齿轮的耦合作用以及滚动体-外圈接触力的角度,对产生该现象的原因进行分析,并提出相应的解决方法。
3.1 通过接触力分析频谱分析失效原因
滚动体通过局部表面损伤时的示意图,如图10所示。由于轴承外滚道表面存在局部损伤,在承载区域滚动体通过局部损伤会产生一个较大的冲击力。利用建立的动力学模型可以查看各个部件之间的接触力大小,其中单个滚动体与轴承外圈的接触力的时域图,如图11所示。
单个滚动体与轴承外滚道缺陷接触的周期Δt可以用式(7)计算得到。
(7)
从图11中可以观察到滚动体通过缺陷的产生的冲击的幅值变化较大,这一现象产生的原因是由于轴承与齿轮的耦合作用。如图12所示,太阳轮与行星轮之间的接触力的大小与方向随着行星齿轮箱的运转而发生变化,导致太阳轮质心在径向平面发生位移。又由于轴承内圈固定在太阳轮轴上,当太阳轮发生径向位移时则会带动轴承内圈也发生径向位移。本文的太阳轮轴承外圈与齿轮箱固定,轴承内圈的径向位移将会导致轴承的承载区域发生变化。当轴承表面缺陷与滚道体接触区域在承载区域内,产生冲击的幅值较大,反之较小。除此之外,太阳轮断齿啮合产生的冲击也会导致轴承内圈撞击滚动体产生图11中的其他较大的冲击。
由于轴承通过缺陷时产生的冲击时强时弱,且较弱的冲击相较于如图13所示齿轮啮合产生的冲击幅值较小,因此容易被齿轮啮合产生的振动所淹没,导致在进行频谱包络分析时在包络频谱中不能找到轴承外滚道故障特征频率fo,因此在太阳轮断齿与轴承外滚道早期缺陷的复合故障下通过频谱分析难以对轴承故障进行诊断。
3.2 复合故障下轴承外滚道故障特征增强方法研究
在滚动体与外圈表面缺陷接触时,产生的冲击力的示意图如图14所示[17],该力可以分解为水平分量和铅垂分量。由于轴承外圈与齿轮箱箱体固定,因此每次产生的冲击都在同一位置。而对于太阳轮断齿故障,断齿与单个行星轮啮合的频率fbm通过式(8)得到为24 Hz,又已知行星架转频fcarrier为6 Hz。因此行星架旋转一周,断齿与单个行星轮啮合4次。由于行星架旋转一周的啮合次数为整数,因此在各个周期内冲击的位置都固定不变。
(8)
做出单个行星轮与太阳轮的接触力以及单个滚动体与轴承外滚道接触力在径向平面上的分布,如图15所示。从图15(a)中可以看出太阳轮与单个行星轮的接触力与理想情况类似,在一个周期内有4次冲击;又由于三个行星轮相同且均匀分布,因此三个行星轮与太阳轮断齿的啮合冲击是均匀分布的12个冲击,如图15(b)所示;对于单个滚动体与外滚道的接触力,由于缺陷的存在且位置不变,因此在缺陷方向的冲击力明显大于其他方向且方向基本不变,如图15(c)所示。
分别对如图16所示的三个位置的外滚道损伤以及太阳轮断齿-外滚道45°损伤复合故障四种条件下的行星齿轮箱进行仿真。在动力学模型的柔性齿轮箱上按照如图17所示,添加两个“Marker”作为加速度传感器,箭头方向为加速度正方向。在ADAMS后处理中导出这两个点在图示方向的加速度信号ax和ay。
根据图16可以推断,在理想情况下:①当缺陷位置与水平夹角为15°时,ax与ay中的冲击信号符号相同,并且ax幅值远大于ay;②当缺陷位置与水平夹角为45°时,ax与ay中的冲击信号符号相同,并且幅值相近;③当缺陷位置与水平夹角为135°时,ax与ay中的冲击信号符号相反,并且幅值相近;④当太阳轮断齿,ax与ay在不同的时刻,幅值与符号的关系不同。
作出四种条件下加速度信号的时域图,如图18所示。前三种情况下的仿真结果与理想情况一致;第四种情况与前文描述相符:ax与ay在不同的时刻,幅值与符号的关系不同。由此可见,相对于太阳轮断齿故障,轴承外滚道缺陷的加速度信号ax与ay中的冲击信号在符号和幅值上有着明显的规律性。而极坐标系中点的极径与极角又是由直角坐标系的点的符号和幅值所决定的,因此可以考虑通过将直角坐标系中的加速度信号ax与ay转换到极坐标系中,来对外滚道损伤与太阳轮断齿进行区别。
MATLAB软件中的“cart2pol函数”可以将直角坐标系中的点转换到极角为[-π,π]的极坐标系中,其原理如图19所示。图19中:r为极坐标系上点的极径;φ为极坐标系上点的极角;x为直角坐标系的横坐标;y为直角坐标系的纵坐标;“actan2函数”由式(9)计算。在极坐标系中r可以反映加速度信号的幅值大小,而φ可以反映ax与ay的幅值与符号关系。
(9)
将图18中的4组加速度信号转换到极坐标系中,得到如图20所示的极坐标图。从图20中可以看出,轴承外滚道缺陷的点在极坐标系中的分布有着明显的趋势,并且趋势的方向与缺陷的位置有关;而太阳轮断齿情况下,点在极坐标系中的分布近似于一个圆。
通过3.1节中对轴承接触力的分析可以知道,当存在复合故障时,轴承的某些冲击被齿轮的啮合产生的冲击所淹没,导致在包络谱中不能找到轴承外圈故障特征信号的频谱。但是由于滚动体通过轴承外滚道缺陷时会产生部分幅值较大的冲击,这部分冲击在极坐标系中不会被太阳轮断齿产生的冲击所掩盖,因此可以用这个方法对复合故障下轴承外圈故障特征进行增强。
对太阳轮断齿与轴承外滚道缺陷复合故障进行仿真,并进行包络分析与坐标变换得到如图21所示的包络谱与极坐标图。从图21中可知,在复合故障下包络谱中有明显的太阳轮故障特征频率fsun及其倍频,但是外滚道故障特征频率fo并不明显。然而从极坐标图中可以发现点的分布有着明显的趋势,因此可以推断齿轮箱存在轴承外滚道缺陷。
3.3 所提方法的试验验证
在试验台上同样按照3.2节图17所示安装两个加速度传感器,采集水平与铅垂方向的加速度信号ax和ay,安装好的传感器如图22所示。分别对健康齿轮箱、轴承外滚道缺陷、太阳轮断齿以及太阳轮断齿-轴承外滚道表面损伤复合故障四种情况进行了试验,得到的极坐标图如图23所示。通过图23能够区分太阳轮断齿和太阳轮断齿-轴承外滚道缺陷复合故障,解决了本节提出的试验中复合故障情况下轴承故障信号被断齿故障信号掩盖而不能通过包络频谱分析对轴承外滚道缺陷进行诊断的问题。
由于太阳轮齿根裂纹与太阳轮断齿故障产生的冲击在空间中的分布规律类似,因此将该方法应用于齿根裂纹与轴承外滚道的复合故障,在行星齿轮箱故障试验台上进行试验,太阳轮齿根裂纹如图24所示。
将采集的加速度信号转换到极坐标中,得到的极坐标图如图25所示。从图25中可知,在太阳轮齿根裂纹的情况下,点在极坐标中的分布近似于一个圆,而在太阳轮齿根裂纹与轴承外滚道复合故障的条件下可以观察到复合故障下极坐标中点的分布具有明显趋势。说明所提出的方法对于太阳轮齿根裂纹与轴承外滚道复合故障同样适用。
4 结 论
(1) 以行星齿轮箱综合故障模拟试验台为研究对象,建立了行星齿轮箱三维实体模型,并利用ADAMS动力学分析软件与ANSYS有限元分析软件建立了含有太阳轮轴承的刚-柔耦合行星齿轮箱动力学模型。
(2) 分别对健康轴承、轴承外滚道缺陷以及太阳轮故障三种条件下的行星齿轮箱进行仿真与试验。将仿真结果与试验结果进行对比,在频域验证了该模型的合理性与实用性。
(3) 从滚动体与太阳轮轴承外滚道接触力的角度分析太阳轮与轴承外滚道复合故障下太阳轮轴承故障信号不能通过频谱包络分析进行诊断的原因。通过分析不同接触力的特性,得到在太阳轮轴承滚动体通过外滚道损伤时的接触力的方向有着明显趋势,而太阳轮断齿与行星轮啮合的接触力分布较为均匀的特点。通过滚动体通过外滚道损伤产生的冲击具有方向性这一特性,提出将两个垂直放置的传感器采集的水平与铅垂方向加速度信号转换到极坐标系中对太阳轮轴承外滚道缺陷特性进行增强的方法,并在仿真与试验中均得到验证。将该方法推广至太阳轮齿根裂纹与轴承外滚道复合故障。经试验验证,该方法在对于太阳轮齿根裂纹与轴承外滚道复合故障下同样适用。
