融合多源信息的智能座椅群控系统
2022-10-26陶文心伍建辉
易 驰,周 芳,陶文心,伍建辉
(湖南理工学院 信息科学与工程学院,湖南 岳阳 414006)
随着我国经济水平的高速发展,人们对汽车座椅的需求不断提升,在保证汽车座椅安全运行的前提下,人们对汽车座椅舒适性和智能性的要求也在不断提高. 刘宝华[1]等提出基于机器学习的座椅位姿调整方法,降低座椅姿态调整的误差,提高座椅姿态调整效率. 朱辉[2]等以BLDCM电动座椅控制系统为例,对座椅姿态调节和记忆系统的软硬件进行了分析和阐述. 王秀芳[3]等提出一款基于MC68HC908单片机的智能座椅,该智能座椅通过控制继电器驱动电机控制汽车座椅运动从而达到调节座椅的目的. 张瑞锋[4]等设计一款基于Android平台的儿童安全座椅控制系统,该系统通过蓝牙通信的方式实现对座椅进行远程控制.吴春建[5]设计一款基于DSM的座椅智能控制系统,该系统电动机带有霍尔信号传感器,给DSM发送座椅位置信号及位置变化的信号,以实现座椅姿态记忆功能. 为进一步满足人们对汽车座椅的智能化和舒适程度的需求,本文提出了一套智能座椅设计方案,主控芯片以STM32F407为核心,通过LD3320语音识别模块、手机APP和按键模块对座椅姿态进行调整,以指纹认证的方式实现身份识别,使用GPS、GPRS和惯性导航模块组成安全守护系统.
1 系统构成
图1 为智能座椅群控系统框架. 汽车内的座椅分为主驾驶位、副驾驶位、后主座椅以及后副驾驶座椅,每个智能座椅控制部分大体由三个部分组成,分别是控制器、遥控器和手机App,其中控制器主要有座椅姿态的控制、通风、加热、按摩模块的驱动、定位和座椅之间蓝牙自动组网等功能; 遥控器主要有指纹身份识别、语音控制和按键操作控制等功能; 手机App 主要有对座椅姿态群控、绑定用户信息和安全守护等功能.
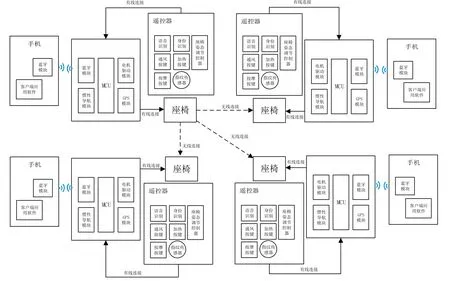
图1 智能座椅群控系统框架
2 硬件设计
智能座椅群控系统的硬件电路主要由控制器和遥控器两大部分组成,其中控制器电路主要由MCU 电路、蓝牙通信电路、记忆电机驱动电路、GPRS 与GPS 电路、惯性导航电路和霍尔信号处理电路组成. 遥控器电路主要由MCU 电路、语音识别电路、身份识别电路、功放电路等组成. 下面重点介绍智能座椅群控系统中的部分关键电路.
2.1 MCU 电路
MCU 电路主要由供电电源、STM32F407 芯片、晶振电路、SWD 接口电路和复位电路组成,其中晶振电路选择使用8 MHz 的石英晶振,供电电源先利用隔离电源12S05 将12 V 转换为5 V,再利用稳压芯片AMS1117 芯片将5 V 转换为3.3 V,数字地与模拟地均采用0 Ω 电阻进行隔离.
2.2 记忆电机驱动电路
如图2 所示,记忆电机驱动电路主要由光耦EL357N、三极管8050、双向继电器ET2-B3M1、肖特基二极管SS14 和自恢复保险丝组成. 若Forward-MCU 为低电平,则光耦U5 导通,三极管Q1 截止、三极管Q2 导通,双向继电器正向导通,记忆电机正转; 若Back-MCU 为低电平,则光耦U4 导通,三极管Q1 导通、三极管Q2 截止,双向继电器反向导通,记忆电机反转; 当Forward-MCU 和Back-MCU 为高电平时,三极管Q1 和Q2 都截止,双向继电器不导通,记忆电机不动作.

图2 电机驱动电路
2.3 记忆电机霍尔信号处理电路
如图3 所示,记忆电机霍尔信号处理电路主要由放大器LM358 和光耦EL357N 组成. 当记忆电机旋转一圈时,霍尔信号输出端口输出一电流方波信号. 本系统拟根据电流霍尔信号的脉冲计数来确定记忆电机旋转圈数. 记忆电机电流霍尔信号UD_HALL+经放大器LM358 差分放大与比较后,输出一低电平为0 V、高电平为12 V 的方波信号,再经光耦EL357N 隔离输出至MCU 捕获端口,以此使MCU 实现脉冲计数功能.
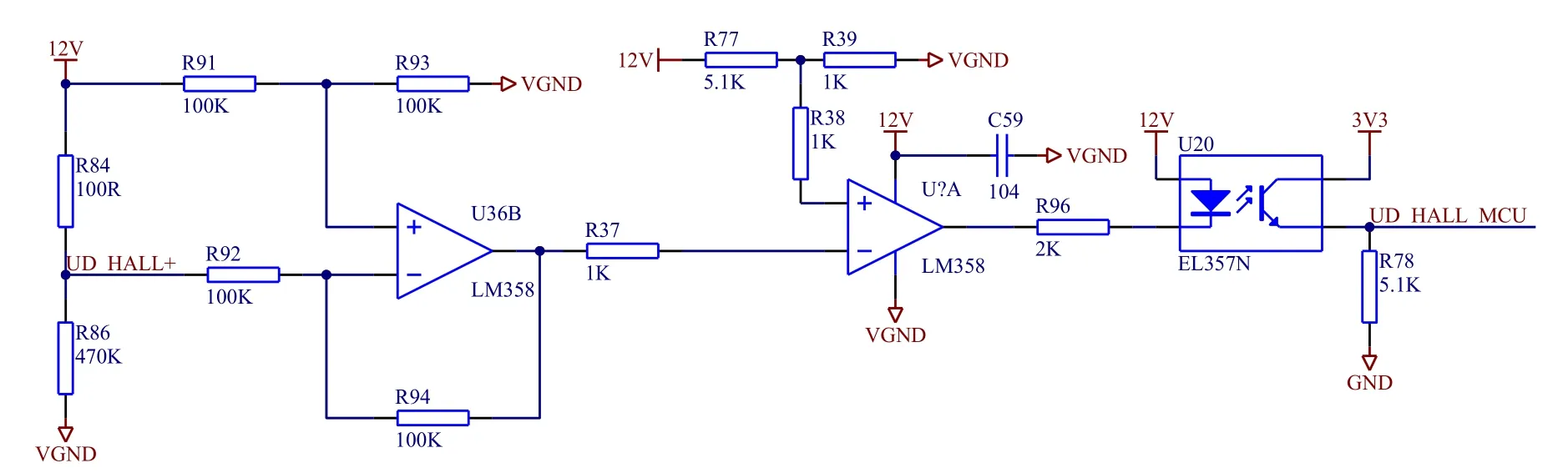
图3 电机霍尔信号处理电路
2.4 语音识别电路
如图4 所示,语音识别电路主要由LD3320 芯片、咪头、喇叭和晶振组成. 音频信号从LX_MICP 和LD_MICN 端口输入至LD3320 中的音频输入口,经LD3320 内部语音信号处理后,通过SPI 方式传送至MCU,以此使MCU 实现语音识别功能. LD3320 内部语音信号处理是通过频谱分析和提取语音特征,再与已设置的关键词语进行比较和打分,并将得分最高的值储存到C5 寄存器中,C5 寄存器的值通过SPI 方式发送给MCU.
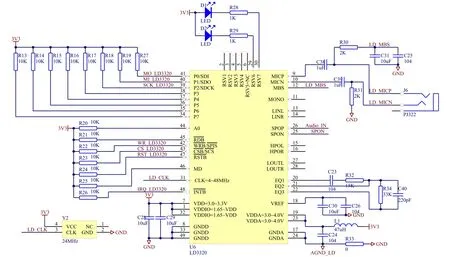
图4 语音识别电路
3 软件设计
基于Keil 软件进行智能座椅群控系统的软件设计. 系统软件设计主要包括: 主程序软件设计、语音控制软件设计、蓝牙通信软件设计、惯性导航模块软件设计、身份识别软件设计和手机App 软件设计等. 下面重点介绍智能座椅群控系统中的部分软件设计.
3.1 主程序软件设计
智能座椅群控系统主程序流程如图5 所示. 智能座椅群控系统主程序主要由初始化、惯性导航、语音识别、身份识别、蓝牙通信、通风调节、加热调节和按摩调节等模块组成. 模块初始化后,主程序进入循环,等待蓝牙与手机建立连接,接收手机客户端发送过来的指令. 一旦收到有效指令,就对记忆电机驱动电路进行控制,实现对座椅的智能控制. 若没有接收到指令,则进行按键检测,通过按键来触发不同的功能模块,分别实现语音控制、身份识别和座椅姿态调节、加热、按摩和通风等功能.
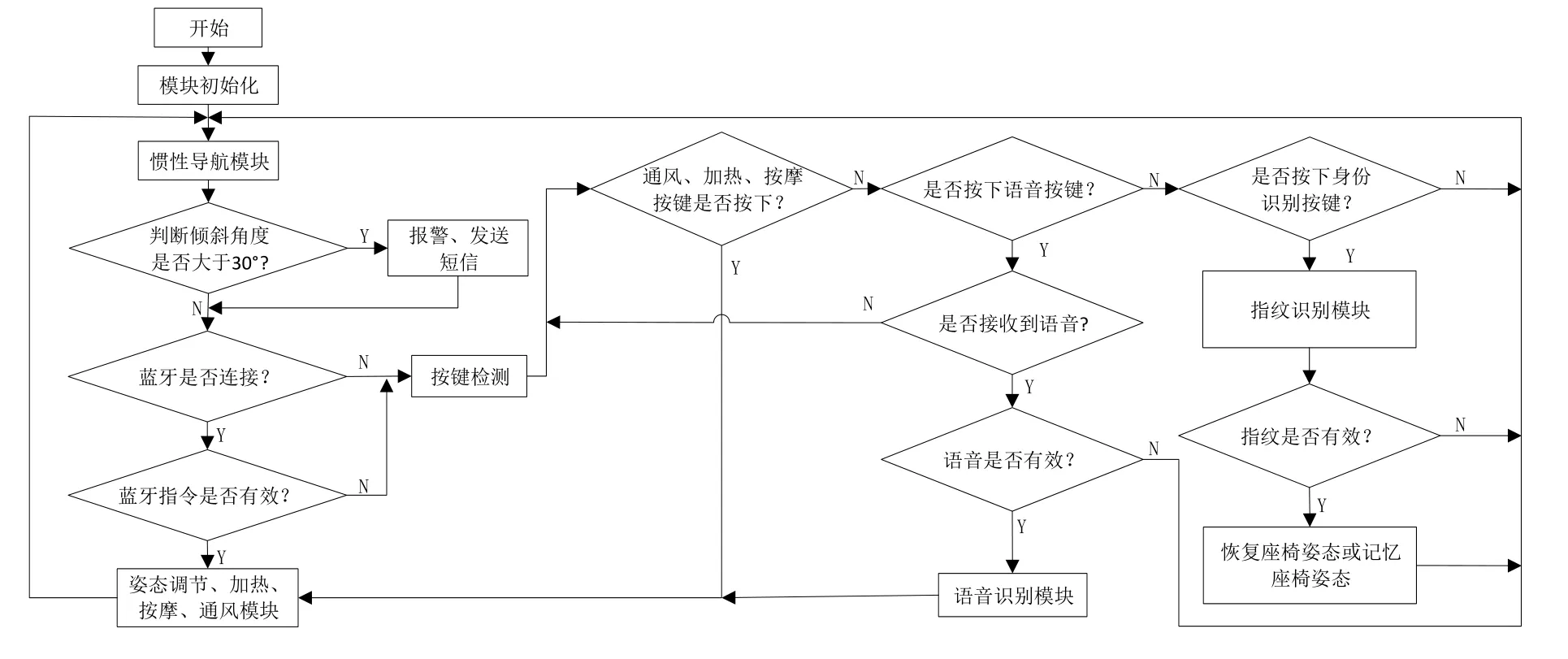
图5 智能座椅群控系统主程序流程
3.2 语音控制软件设计
智能座椅群控系统语音识别流程如图6 所示. 首先程序等待语音按键触发,一旦检测到按键触发,先进行LD3320 初始化,然后判断LD3320 内部的DSP 是否空闲,若空闲则发出提示语音,等待语音输入并进行计时,如果超过10 分钟没有语音输入则重新进行按键检测循环; 当有语音输入时LD3320 进入轮询模式[6],将语音写入识别列表,系统开始进行语音识别,并准备好中断响应函数,初始化寄存器,打开中断允许位; 识别完成后,将最可能正确的值写入C5 寄存器并通过SPI 方式发送给MCU,执行相对应指令的操作,同时初始化计时器.

图6 智能座椅群控系统语音识别流程
3.3 身份识别软件设计
身份识别是基于电容式指纹识别模块开发设计,通过按键唤醒指纹识别,然后等待录入指纹,指纹录入后提取有效的指纹特征,若没有提取到指纹特征则语音提示重新录入指纹; 若提取到指纹特征则将指纹与记忆库中指纹进行匹配. 如果相匹配则恢复已记忆的座椅姿态; 反之则调整座椅姿态,再长按记忆按键记忆当前座椅姿态. 智能座椅群控系统身份识别软件设计流程如图7 所示.
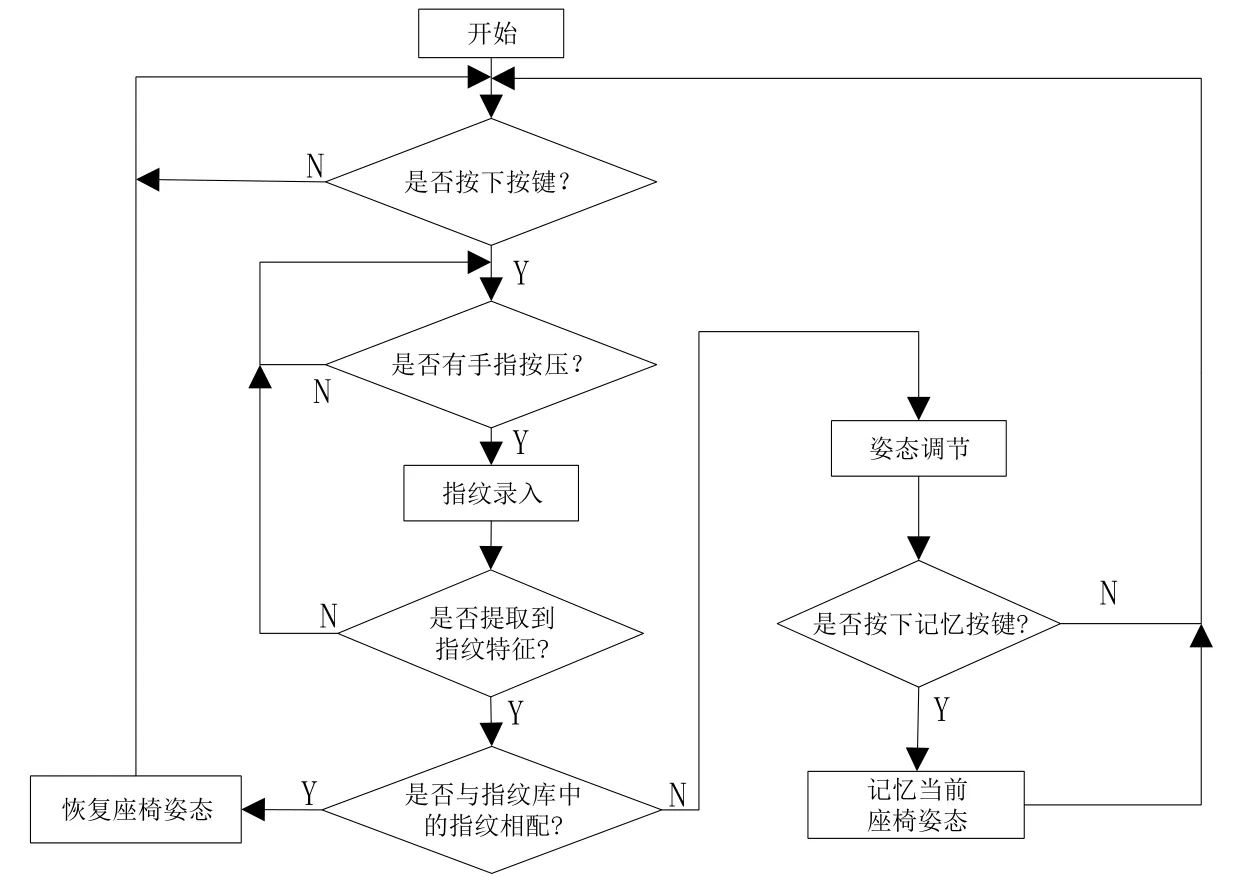
图7 智能座椅群控系统身份识别软件设计流程
3.4 手机App 软件设计
手机App 基于蓝牙进行通信. 用户使用手机App 通过蓝牙可对座椅进行群控; 同时手机App 能够对汽车进行定位追踪并实时显示地图; 能够绑定用户手机号码,当发生紧急情况时,能够发送报警短信至已绑定的号码上; 当用户离开车辆时,用户仍然可以通过手机App 连接网络从而实现对座椅状态的远程设置操作. App 软件设计流程如图8 所示.

图8 手机App 软件设计流程
4 功能测试
4.1 语音控制功能测试
语音控制要求系统在用户触发语音按键之后,对输入的语音与已设置的关键词进行匹配,并输出相对应的指令控制智能座椅. 定义语音识别率为

由于LD3320 会将识别结果存储到C5 寄存器,然后输出到MCU 中,因此只要给LD3320 咪头反复输入待识别语音,判断MCU 中C5 寄存器的值是否与输入语音对应的值相匹配. 实验次数为100 次,识别正确次数为96 次,语音识别率为96%. 实验结果表明该系统语音控制功能较好.
4.2 手机App 功能测试
智能座椅手机APP 界面如图9 所示,包括座椅控制、安全守护和用户设置三个页面. 座椅控制页面能够通过蓝牙完成对各个座椅的六向姿态调节、通风、加热和按摩等控制功能; 安全守护页面能够对汽车当前位置的进行定位和追踪; 用户设置页面能够完成蓝牙的连接和电话号码的绑定,在发生危险时能够发送短信给已绑定的电话号码. 报警短信接收界面如图10 所示.
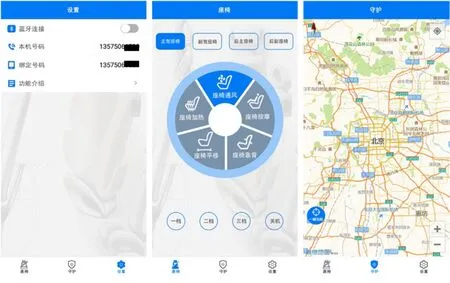
图9 手机APP 界面
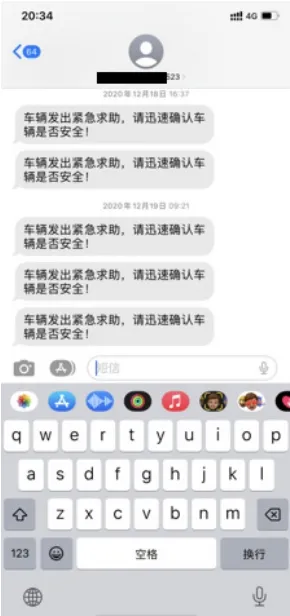
图10 报警短信接收界面
4.3 身份识别功能测试
身份识别测试目的是测量恢复后的座椅姿态是否能达到记忆时的座椅姿态. 先调整座椅为某一姿态,并记录该姿态的各项位置数据,再将座椅复位至初始状态,然后用指纹验证恢复至调整姿态,比较当前数据与姿态复位之前的数据,测试结果见表1. 在实际工作中,由于电机的转动惯量、计数器和霍尔传感器的误差等原因,无法实现理论上的完全记忆,必然会产生姿态误差.

表1 理论记忆值与实际恢复值对比
5 结束语
本文提出了一套完整的智能汽车座椅硬软件系统设计方案,并基于STM32F407 平台进行开发与实现,智能座椅在姿态调节的基础上加入了通过语音和指纹对座椅的姿态进行调整和记忆的功能,使用蓝牙mesh 自组网实现对座椅的群控功能,使用惯导模块对座椅姿态进行监测,实现了座椅姿态异常时发送短信给紧急联系人的安全守护功能. 这些功能提高了用户使用智能座椅的体验感,减少了人们对汽车座椅的不舒适感,打造出更加舒适和智能的车内环境.
