一种杆类维修和清洁爬杆机器人设计
2022-10-26王伟WANGWei李雄LIXiong符国通FUGuotong
王伟 WANG Wei;李雄 LI Xiong;符国通 FU Guo-tong
(湖南工业大学机械工程学院,株洲 412007)
1 研究背景及其意义
随着现代城镇经济和建设现代化的进程步伐不断地快速发展,城市建筑物中随之出现了许多具有美观性的如各种建筑路灯杆、电线杆、广告牌立柱及各种铁路大桥钢索柱体等建筑杆件物体(图1),它们常年地裸露在空气中,因逐渐受到了大量强酸性物质的腐蚀,缩短了使用寿命,影响着其外表美观,所以对于它们就需要人工进行定期检查和清洗及维护。但在目前的高空维修作业领域普遍存在高空劳动强度系数偏大、效率又偏低、危险性还大、成本也太偏高等问题。

图1 各种建筑杆件物体
目前,为了克服清洗维护杆件这一难点,多选择的清洗方法,主要是采用水枪加压去渍法、人搭坐车梯除污法和人坐吊篮除污法。尽管采用水枪加压的方法对于杆上污渍的清洗有一定的成效,但是这一方法也存在不足之处,如水枪加压清洗需要持续的水供应,造成水资源的浪费,产生的成本较高,同时由于水喷射中高度过高而导致速度大大减小,因此只能处理矮杆,对于高的杆件难以清洗。分析之后可以十分清楚地看出,这种利用在高空进行自动清扫作业的升降平台进行自动的清洗、检测及检查和维修金属杆件的方法也都有高成本,低效率,高风险三个主要缺点。研发这样一款可以攀爬的高空杆件机器人来完成日常维护清洁相关工作便可以很好地来代替传统的人工攀爬方式,从而实现了维护和清洁成本的大大节约,同时工作效率也有明显提高。
2 爬杆机器人的整体结构说明
此机器人由上下两组夹紧松开机构和苏格兰轭传动机构组成,通过减速电机带动曲柄及顶件进行运动,实现机器人的爬杆动作。整体结构如图2所示。
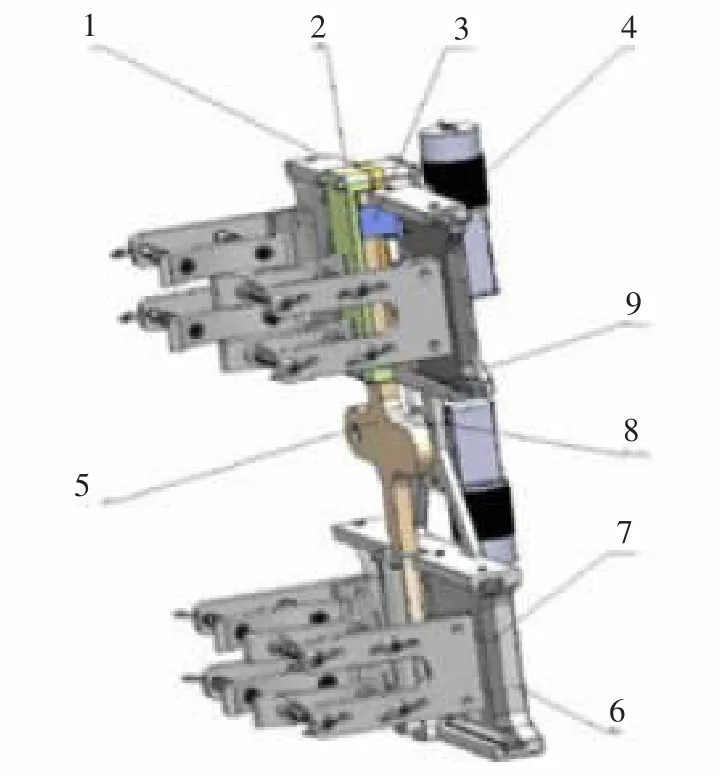
图2 爬杆机器人总装图
3 运动方案的选择
为了使机器人能够灵活地在杆件上下运动,就必须有两个功能,一是贴附功能,二是移动功能;而贴附的方式大多由吸附方式和夹持方式这两种方法实现,移动方式有轮式移动、履带式移动、蠕动式和腿式移动的方法。爬杆型机器人的整体外形的设计往往会因各种作业环境场景要求和实际操作活动对象特性有所不同,因此对于其的移动及固定放置方式设计选择方面与机器人在贴附与安装等方式的设计方式上进行的设计合理度选择等方面同样可能存在着与其他行业诸多技术因素差异。通过广泛研究与对比分析现有机器人各类机械移动的方案和机器人的贴附式移动固定方案,本型机器人的设计和方法主要模仿尺蠖的爬行与运动的步态模型设计出发,结合现有机器人的夹持式机械的贴附移动固定的方式和与蠕动式的机械移动结合的固定方式,组合成具有结构紧凑、操纵容易、负载驱动能力强、稳定性能好、对不同大小立杆适应能力强的爬杆类机器人。
4 夹紧与松开方案分析
夹紧和松开机构是爬杆智能机器人附着在杆上的重要内部结构。爬杆智能机器人不仅要具有一定负载综合能力,还应该满足爬杆智能机器人对杆的一定适应能力。图3显示了攀爬机器人上部夹紧机构和抱爪结构的三维相关模型。上部夹紧机构和松开机构应由夹爪、上曲柄、上顶件、双向移动滑轨等组成。两个上夹紧板借助四个双向移动滑轨与上安装架连接,并且横向可以左右相互移动。此外,上方左右两块夹紧板通过轴承连接可以变滑动摩擦为滚动摩擦,从而减轻上顶件与夹紧板移动槽的磨损。两个滑轨间歇水平位置移动,以完成爬杆智能机器人的夹紧和松开动作。同时,为了适应不同范围大小的直径杆,采用半月抱爪,在半月抱爪上贴附一定摩擦系数的橡胶材料,使得有一定的防滑能力和保护杆件的作用。攀爬智能机器人夹紧和松开动作完成的机理如下:上部直流减速电机5号驱动曲柄在上顶件的凹槽中移动,上部苏格兰轭机构开始工作,上顶件在曲柄的驱动下沿直线上下运动。上顶件上部的滚针轴承在上夹板的凹槽中移动,将竖直运动转化为上夹紧板在上安装架上的横向运动,完成爬杆机器人的夹紧与松开动作。
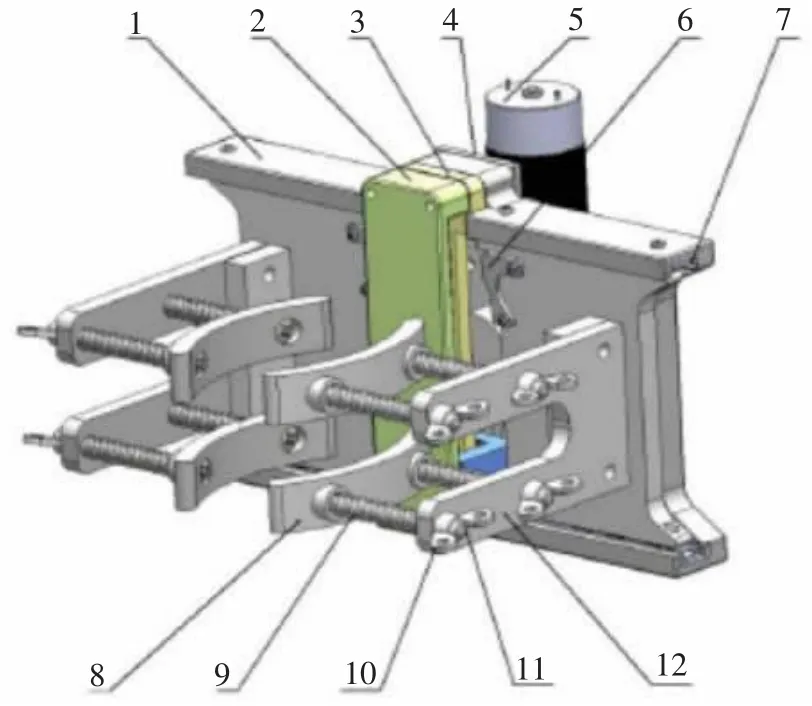
图3 爬杆机器人上部夹紧机构和抱爪机构
5 传动方案设计
传动系统作为现代爬杆式机器人发展两个重要的分支组成的关键之一,需要系统将来通过自旋逆转使电机转子发出强大的控制伺服机械力来直接通过传动元件分配作用到构成整个的爬杆式机器人体系中的各个主要机械的执行系统构件。通过模仿尺蠖人的爬行步态而完成爬杆式机器人步态的设计,即尺蠖双前足松开后双足抱紧,上躯干前伸,然后前双足抱紧,后双足松开,后躯干向上伸,实现向上移动。根据对该步态机器人的初步设计研究和设计方案,采用了苏格兰共轭往复机构来设计作为爬杆式机器人的某一特定主要的机械及传动或辅助控制构件。苏格兰轭机构可以将曲柄的旋转运动转换为轭的直线运动。如图4为传统的苏格兰轭机构图和三维图。

图4 传动方案设计
由图可知,在曲柄旋转的过程中,顶杆4的总行程是曲柄2长度的二倍,因此针对苏格兰轭的传动方式和结构特性,来设计爬杆机器人的关键传动机构,采用的这种苏格兰传动轭机构除能更有效可靠地实现对爬杆型机器人更为平稳且更加有效和可靠的传动设计外,更能够真正实现将垂直且平行于杆件方向上移动方向的机械结构进行优化处理并避免使位于该运动方向上移动的机械结构显得过于庞大臃肿。
6 爬行杆件及变直径杆分析
目前国内大部分小区和繁华街道的附近多采用下边大上边小这种分段式的圆柱杆,杆件的长度也多半低于10m,下部杆直径大约为150mm,下杆安装的总高度大多在约1.4m或以下,连接着顶部安装的法兰盘。上杆则是采用直径约为75mm的等直径杆,其中在顶部安装监控。对于等直径杆,研究对象为直径大小为150mm和75mm的杆件。然而变直径杆件,比如以路灯杆的锥形杆为例,考察知道变径路灯的整体锥度要求在1:100以内,若爬杆工业机器人要在上述类型杆件自由上下爬行,则必须突破爬行变长直径杆件搭设上的障碍,以增强爬竿自动化机器人对该类型杆件搭设的适应性,方可在该类型杆件搭设上正常完成作业。故对于变直径杆取杆的长度为5m,小端直径为60mm,大端直径为140mm。
关于变直径杆件进行夹紧的这一技术问题,使用柔性的夹紧机构可以有效地解决。爬杆夹机器人中的半月抱爪夹紧模块结构如图5中所示。由于对于小径处会导致抱爪片与爬杆件的有效接触面积减小,故要在半月抱爪和抱爪安装板座之间另加装一个预紧弹簧,用于支撑和位置调整,同时在半月抱爪与杆座接触部的外表面处加装用于增加与安装杆件表面摩擦量的橡胶片,加大弹簧摩擦系数,橡胶材质柔软,还起到保护杆件不受损害的作用。在爬杆机器人第一次在杆件上安装时,可以通过调节预紧螺栓弹簧初始变形,从而使得半月抱爪和杆的位置可以调节,来增强爬杆机器人在变直径杆件表面的爬行和适应安装的工作能力。
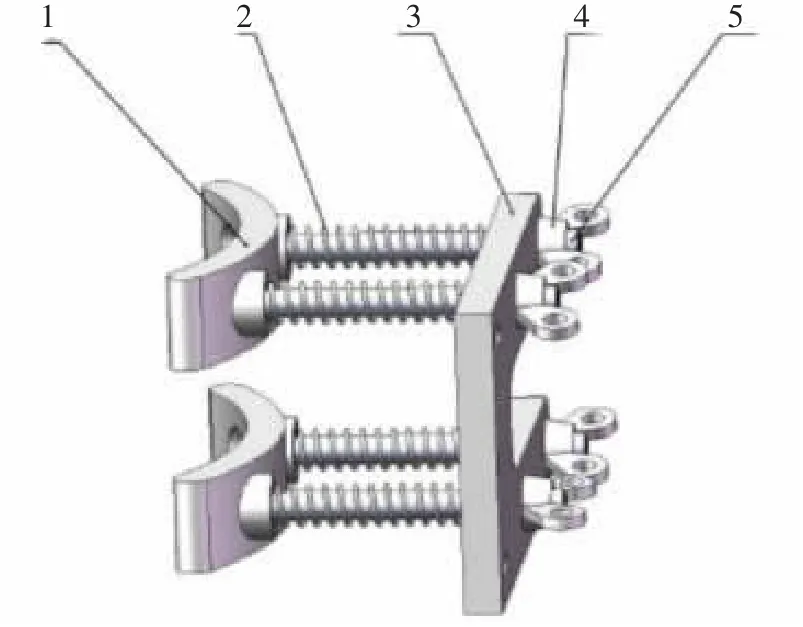
图5 半抱爪夹紧模块结构
7 结论
爬杆机器人采用夹持式贴附方式与蠕动式移动方式并通过苏格兰轭机构作为传动机构,完成爬杆机器人上下抱爪交替夹紧-松开,以苏格兰轭机构曲柄两倍长度为一个行程向上攀爬。同时,对于变直径杆问题,采用柔性抱爪解决这一问题,通过预紧弹簧调节抱爪与杆之间的接触,从而来提高爬杆机器人的适应能力。
