一种用于电力维修的爬杆机器人设计
2021-03-15国网安徽省电力有限公司电力科学研究院吴少雷国网安徽省电力有限公司铜陵供电公司
国网安徽省电力有限公司电力科学研究院 冯 玉 吴少雷 吴 凯 国网安徽省电力有限公司铜陵供电公司 李 君
国网安徽省电力有限公司芜湖供电公司 何水兵 安徽工程大学 韩 波
自二十世纪七十年代以来国内外专家学者从事对爬杆机器人的研究,目前研制出的爬杆机器人主要可分为三大类:连续运动式爬杆机器人、步进式爬杆机器人和冗余自由度爬杆机器人。
连续运动式爬杆机器人利用机器人与杆体接触表面的摩擦力来实现快速爬杆运动,主要代表有国网霍邱公司研制出载人登杆装置,其主要优点是运动连续,爬杆效率高和良好的负载特性,缺点是对于非圆杆物体或者圆杆物体表面存在障碍物时无法进行爬杆运动;步进式爬杆机器人通过循环往复的伸缩运动来实现爬杆运动,主要代表有武汉理工大学设计的曲柄滑块机构爬杆机器人,但是其存在爬升速度低且无法越障等问题;冗余自由度爬杆机器人主要有蛇形机器人,通过缠绕在杆体的外表面,然后执行一套固定的时序动作从而实现爬杆运动,主要有上海交大开发的CRS 蛇形爬杆机器人、波士顿动力公司研制出RiSE V3多足攀爬机器人。
以上这些爬杆机器人存在整体质量较重、承载能力不足、攀爬效率低下以及攀爬路径导航困难等问题,严重制约了其应用和推广,难以直接应用到配电杆塔等作业环境。
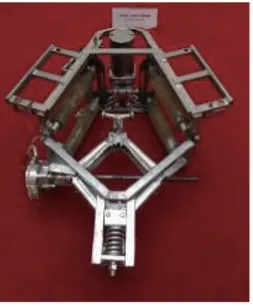
图1 国网霍邱公司载人登杆装置

图2 曲柄滑块机构爬杆机器人
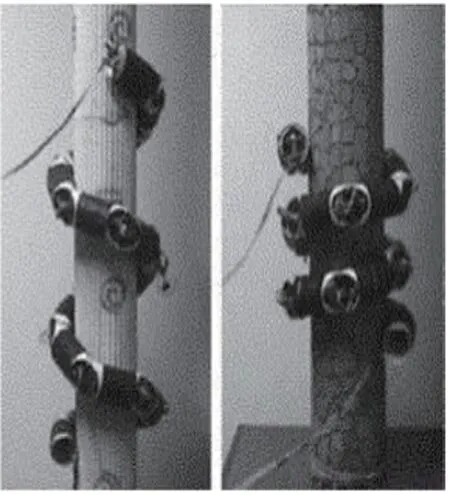
图3 上海交通大学CRS 蛇形爬杆机器人
1 爬杆机器人机械结构简介
本文中的爬杆机器人有左躯干和右躯干两部分,主要采用类似人借助脚扣登杆的攀爬式原理,左右躯干分别具有上下两个握爪机械手,类似人类的左右手和脚,左躯干和右躯干的握爪机械手对杆身交替夹紧放松,通过升降执行装置使左躯干和右躯干二者交替升降,实现攀爬并可跨越如抱箍、横担等部分杆上障碍,而且通过抱爪上的轮式机构实现承载平台的绕杆旋转运动,使爬杆机器人可灵活越障和准确到达作业位置,并为带电作业操作机构提供稳定灵活的作业平台。

图4 人借助脚扣登杆攀爬原理图
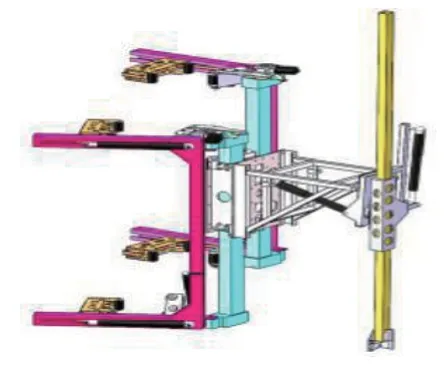
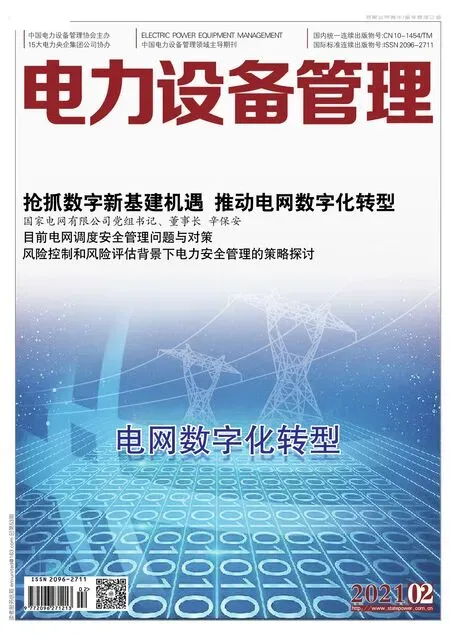
图5 爬杆机器人总体结构图
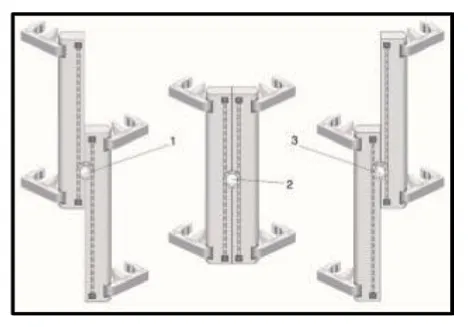
图6 爬杆机器人躯干总成工作原理图
爬杆机器人躯干总成工作原理如图6所示,其中1、2、3是动力总成的输出链轮的三个运行状态,1的状态是右旋,左躯干上升;3的状态是左旋,右躯干上升;2的状态是旋转至“0”位,躯干回中,此时四肢同时握杆时左、右部分是错开的。执行机构电机输出轴连接减速机组成动力总成,动力总成的输出端安装两片链轮,两条传动链分别上、下对兜包裹于链轮上。
握杆抱爪机构。爬杆承载平台四肢末端共四个握杆抱爪,上、下结构完全一样,左、右外观及内部布局结构完全对称,拟采用的结构如图7所示。握杆抱爪可以抓握等径杆和拔梢杆,自动适应杆径大小,自动完成抱杆、握紧杆、自锁、撤杆的四个顺序动作,并且能够按实地工况要求实现绕杆圆周转体动作,配合躯干的运动可以在爬杆过程中有效的避开、翻越障碍物,如图8所示。
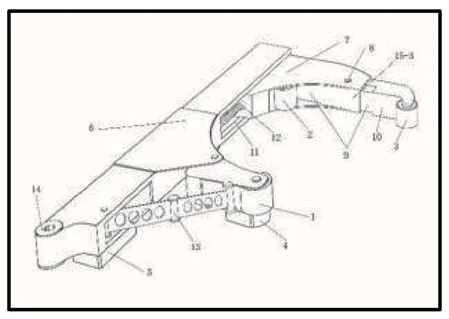
图7 握杆抱爪机构结构图
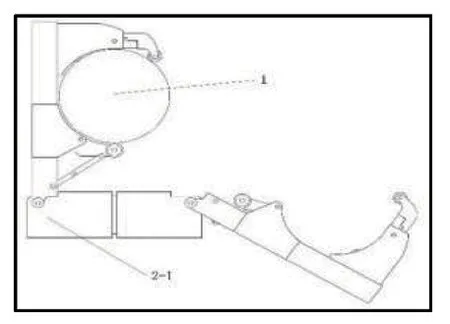
图8 抱杆与撤杆动作示意图
2 爬杆机器人电气系统简介
本文中的爬杆机器人主控器使用西门子S7-1200系列可编程控制器,S7-1200作为一款功能模块化设计的PLC,拥有高精度AD 模块、DA 模块、串行通讯模块以及网络通讯模块,可根据任务实际需求配置不同的功能模块。S7-1200可完成各种复杂的逻辑控制,同时对于电机的运动控制提供的专业的功能模块。
电动推杆不同于气动推杆利用气体介质的压缩来实现推杆的运动,电动推杆通过内部的传动机构将内部电机的旋转运动转换为推杆的直线运动。电动推杆作为一种电力驱动装置,可实现远距离、自动化控制。本文中使用电动推杆作为爬杆机器人的抱爪的执行单元,机构简单可靠,可以简易的实现爬杆机器人的抱杆动作。
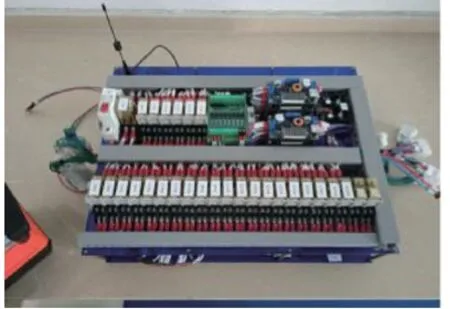
图9 基于S7-1200的主控制器

图10 握杆抱爪电动推杆
3 爬杆机器人软件系统设计
爬杆机器人动作时序。爬杆机器人的单个运动周期可分解为两个左右两侧躯干对称的运动过程,以左躯干运动进行简单介绍:初始状态时,左躯干抱紧,右躯干抱紧;步骤1,左夹爪松开,左躯干旋转至最外侧;步骤2,左躯干上升至指定位置;步骤3,左躯干旋转至抱杆位置;步骤4,左夹爪抱紧,左右躯干此时恢复抱紧状态。
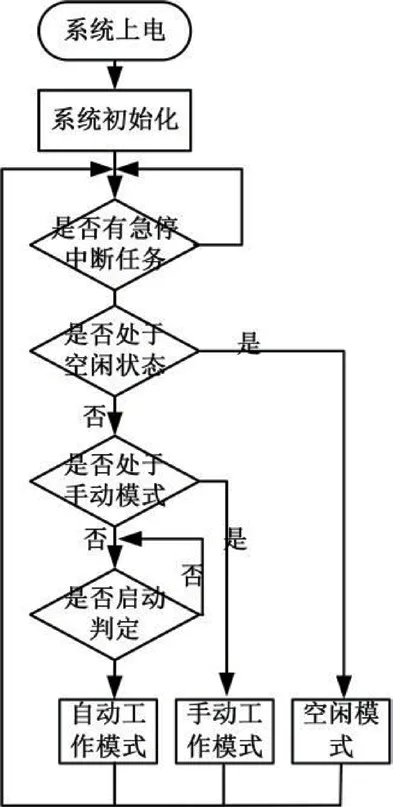
图11 爬杆机器人控制流程图
目前随着电网维护工作的日益繁重,高强度的工作量和较高的危险系数对基层的电网维护工作人员是一种较大工作的负担。设计一款高效的爬杆机器人来逐步替代人工进行电网的维护工作是迫在眉睫的大事,本文中设计的爬杆机器人通过搭载不同的作业工具可以执行不同的维护任务,可以有效的降低人工的工作量,对整个电力系统的改善有着积极的影响。