混合动力汽车动力系统建模与仿真
2022-10-25刘艳,魏凯*
刘 艳,魏 凯*
(1. 大连大学大连市环境感知与智能控制重点实验室,辽宁 大连116622; 2. 大连大学信息工程学院,辽宁 大连116622)
1 引言
随着资源短缺和环境污染日益加重,国内外汽车研究机构和企业都致力于改善汽车的排放和燃油经济性,将新能源汽车作为研究重点。受电池等储能技术的制约,纯电动汽车行驶里程短、充电时间长、环境适应能力差。混合动力汽车兼具传统燃油汽车和纯电动汽车的优点,可以有效地改善燃油消耗及降低排放,是目前解决节能环保问题最有效的方案之一[1]。在实车的设计和研发过程中,计算机仿真是一个有力的辅助工具,可以有效地提高研发效率,缩短研发周期,降低研发成本。在混合动力汽车系统开发中主要应用的是基于模型的设计方法[2]。
混合动力汽车是一个多领域复杂系统,包含了机械、电子、液力、控制等不同学科领域,具有很强的非线性特性,需要采用多领域统一建模方法[3]。胡均平等[4]运用功率键合图法建立混合动力汽车动力系统数学模型,在Simulink软件平台上建立了混合动力系统模型,但相比于物理模型不够直观。曹景升等[5]利用AVL-CRUISE软件建立插电式混合动力汽车动力系统的模型,在NEDC工况下对该模型整车性能及整车动力性进行仿真分析,验证了模型的有效性,但AVL-CRUISE中的各部件模型核心代码不对用户开放,无法灵活更改。佟刚等[6]在原有的ADVISOR平台基础上进行二次开发,建立了混合动力汽车的后驱模型,然而ADVISOR在2004年停止更新,已有的车辆模型不能很好展示现有的汽车技术。郑竹安等[7]利用Matlab/simulink软件建立混合动力汽车动力学模型,采用的数值建模法虽然提高了建模精度,但对特定实验数据依赖大,通用性较差。王浩淼等[8]在系统仿真软件Matlab/simulink中,采用理论模型和真实试验数据相结合的建模方法,建立了插电式混合动力汽车整车模型,所建立的模型未采用实车所需的CAN总线进行模块间通信。
本文以并联混合动力轿车为对象,基于Simscape建立混合动力汽车动力系统物理仿真模型,按硬件装配的模式用搭积木的方法完成电气系统和机械系统的统一建模,在提高模型可信度和复杂度的同时增强模型易检验性与可修改性。利用Vehicle Network Toolbox建立控制器局域网络,让动力系统和控制系统模型通过CAN总线实现信号共享,旨在使混合动力系统仿真模型信号传递与雅阁混动汽车情况相符。在NEDC循环测试工况下,采用实车参数对模型动力系统性能和燃油经济性进行分析,验证所建混合动力系统模型的有效性和实用性。
2 动力系统结构
如图1所示,并联式混合动力系统有发动机和电动机两套驱动系统,有单独驱动和协同驱动两种运行模式,主要包括发动机、电动机/发电机、DC—DC、电池、机械耦合装置等。发动机和电动机输出动力经机械耦合装置合成动力总成驱动汽车行驶。动力系统与控制系统通过CAN总线连接并实现信号共享。
3 动力系统模型
混合动力系统是个复杂的工程系统,采用底层建模方法相当麻烦,且模型检验和维护困难,为此,本文采用多领域物理建模工具Simscape工具箱中的Driveline构建动力系统模型,实现跨学科建模与仿真研究,减低因领域经验不足对模型可信度的影响。
3.1 车辆动力学模型
分析研究汽车加速、制动过程中动力系统的驱动能力需要考虑车辆的纵向动力影响。汽车行驶中的受力分析如图2所示,车辆行驶过程中会受到驱动力、滚动阻力、空气阻力、加速阻力、坡道阻力,因此,可按(1)式计算汽车行驶中的驱动力。
Ft=Ff+Fw+Fi+Fj
(1)
其中,Ft为汽车的驱动力,Ff为滚动阻力,Fw为空气阻力,Fi为坡度阻力,Fj为加速阻力。
如图3所示,车辆动力学模型由车身、魔术轮胎、齿轮箱等构成。模型的输入信号是空气阻力和道路坡度,输出为汽车车速。本文以雅阁混动轿车为例对整车基本参数进行配置,如表1所示。

表1 整车基本参数
3.2 发动机模型
如图4所示,发动机模型采用的是Simscape中的通用发动机模型Generic Engine,配置转矩传感器Ideal Torque Sensor采集发动机扭矩、转速传感器Ideal Rotational Motion Sensor采集发动机转速,用于控制系统的逻辑控制。模型输入信号为节气门信号T,输出信号是发动机的扭矩和转速。为实现节能减排,混合动力汽车中的发动机应工作在最佳燃油区域,且要满足纯发动机驱动下对应最高车速的功率要求[9]。本文以雅阁混动车中的2.0L发动机为例,配置最大功率为107kW,对应转速为5500r/min,依据发动机的扭矩和转速计算出燃油消耗量,依据图5确定最佳工作区域。
3.3 电动机/发电机组模型
目前,混合动力汽车以双电机驱动为主,当发动机驱动力不足或者燃油消耗较大的时,电动机提供辅助驱动力;当动力电池剩余电量低于设定下限时,发电机为动力电池充电;当汽车减速时,电动机制动将动能转化为电能给电池充电。
永磁同步电动机具有高效率、高控制精度、高功率密度、良好的转矩平稳度、低噪声等特点,是当前混合动力汽车驱动电机的主流选择[10]。电动机和发电机的模型采用Simscape中的Simplified PMSM Drive模块,鉴于电机运行过程存在损耗,本模型中电机的整体效率设为90%[11],使所建车用电机模型更符合实际运行的工况。模型输入是来自控制系统的电动机和发电机的扭矩需求,输出为电动机和发电机的转速,电动机/发电机组的模型如图6所示。
3.4 电池模型
锂离子电池具有能量密度高、高温性能好、低记忆效应等优点[12],在混合动力车中得以广泛应用。如图7所示,本文电池组使用Simcape中的电池通用动态模型Battery建模,将电池型号设置为Lithium-Ion,模拟锂离子电池的充放电特性。
电池模型的容量设为6Ah,电压为259.2V,SOC区间选择30%~80%,避免出现过充和过放问题。
4 控制系统
混合动力汽车行驶中,发动机通常在最佳燃油点附近运行,以减少燃油消耗;电池在设定的SOC区域内运行,以提高电池使用寿命。为此,本文设置了5种控制模式。
1)电机驱动模式。汽车起步或者低速行驶时,发动机的燃油经济性较差,由电机单独驱动;
2)发动机驱动模式。汽车中高速行驶且中等负荷,发动机运转于高效率区间时,仅由发动机驱动;
3)混合驱动模式。汽车加速或爬坡时,电机单独驱动无法提供足够扭矩时,由发动机和电机共同驱动;
4)发电机充电模式。汽车行驶过程中电池SOC低于最小设定值,发动机带动发电机为电池充电;
5)再生制动模式。电动机将部分动能转化为电能存储于动力电池中,提高续航能力。
如图8(a)所示,控制系统的模型由功率分配模块、发动机控制模块、电动机控制模块、发电机控制模块、控制逻辑模块组成。图8(b)的发动机控制模块采用典型PI控制,输入目标车速对应的发动机转速期望值和实际发动机转速,输出节气门开度。图8(c)为电动机控制模块,输入目标车速对应的电动机转速期望值和实际电动机转速,输出电动机输出扭矩的期望值,用于控制电动机的实际扭矩大小。图8(d)的发电机控制模块输入SOC值,输出发电机输出扭矩的期望值,用来控制发电机的实际扭矩大小。图8(e)控制逻辑模块输入实际车速、SOC值和发动机转速,输出电动机和发电机的使能信号,控制电动机和发电机的启停,具体控制逻辑见表2。
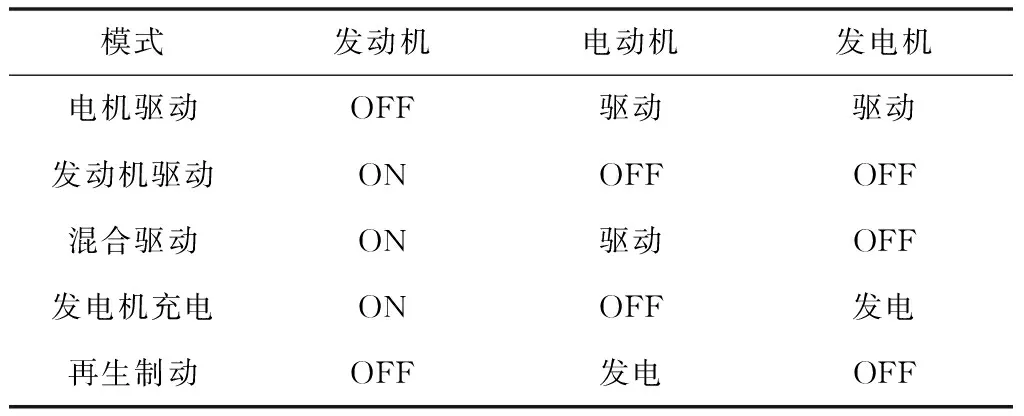
表2 控制逻辑
5 CAN总线建模
本文利用simulink中的工具箱Vehicle Network Toolbox建立CAN总线模型。用CANdb++编辑器创建动力系统的CAN网络数据库(DBC)文件。如图9所示,DBC文件包括网络节点(Nodes)、报文(Messages)、信号(Signals)。
配置CAN Configuration模块,建构两个虚拟通道,进行数据收发,信道波特率设置为500000。使用CAN Pack模块将传输的信号数据加载到DBC文件报文中,使用CAN Unpack模块将接收到的报文解包为信号数据,同时指定目标报文名称、报文标识符、报文ID和报文长度。
CAN Pack模块和CAN Transmit模块共同构成图10(a)所示CAN发送块,CAN Receive模块和CAN Unpack模块共同构成图10(b)所示CAN接收块,收发模块以报文形式进行数据传输,整个动力系统中的CAN总线模型见图10(c)。
6 仿真结果与分析
为验证模型的动力系统性能,选择新标欧洲循环测试(NEDC)工况进行仿真,模型的车速跟随性如图11所示,实际车速与期望车速几乎完全重合,说明所建混合动力汽车模型动力性能良好,CAN总线传输准确性和实时性满足要求。整个循环工况中车辆的油耗为4.76L/100km,符合车辆运行中的实际油耗情况。
图12中SOC初始值为80%,在四个市区工况循环下SOC缓慢下降16%;在郊区工况下SOC下降16%,制动时增加9%。很好反映了实车运行中的SOC工作状态。
图13为发动机和电动机的NEDC工况下的转速变化曲线。车速低于20km/h时仅电动机参与驱动;车速高于20km/h时,加速阶段发动机和电动机共同参与驱动,匀速阶段发动机单独驱动;车速高于80km/h时,发动机和电动机共同驱动,整个运行工况中发动机的转速位于1000~4000r/min区间内,位于图5所示的最佳工作区。
7 结论
本文利用Simulink/Simscape建立了混合动力汽车动力系统的物理仿真模型,用工具箱Vehicle Network Toolbox建立了CAN总线。模型结构直观,各模块易于灵活更改。仿真结果表明,所建动力系统的模型能反应不同的工况下混合汽车动力系统的动态性能和燃油消耗情况,CAN总线的实时性和准确性满足实车需求。因此,本模型可为混合动力汽车的深入研究提供基础。