卫星抖动对激光干涉测量影响的仿真分析
2022-10-25王璐钰李玉琼
王璐钰,李玉琼,蔡 榕**
(1. 中国科学院空天信息创新研究院,北京100094; 2. 中国科学院大学航空宇航学院,北京101408; 3. 中国科学院力学研究所,北京100190)
1 引言
中国科学院“太极计划”拟定于2033年左右发射三颗绕日轨道的卫星,其构型为星间距为300万公里的等边三角形。针对星间的多普勒频移效应,“太极计划”采用外差式激光干涉方法学,并通过四象限光电探测器(four-quadrant photodetector,QPD)测量干涉信号相位的变化来反演引力波。空间中,卫星受天体引力梯度、宇宙射线、太阳风和星际磁场等非保守力的影响而发生抖动。一方面,远端卫星抖动导致激光器出射激光的传播方向发生抖动(激光器出射光束自身的抖动考虑在内),同时本地卫星的接收望远镜受镜片平整度与打磨精度等因素的影响,使接收到的激光产生波前畸变,从而引起干涉信号的相位发生变化,导致激光干涉测量产生误差。根据“太极计划”的方案设计,由远端卫星抖动所引起的激光指向抖动噪声应≤ 1nrad/√Hz@0.1mHz-1Hz。另一方面,本地卫星姿态抖动会引起该卫星上的测试质量(test-mass,TM)产生倾斜,导致从TM反射的本地激光光束发生角度倾斜,引入额外的光程差,并产生角度相干干涉效应,即所谓的TTL耦合噪声。同理,根据“太极计划”的方案设计,由本地卫星抖动所引起的TTL耦合噪声应≤ ±25μm/rad@±300μrad。
在激光指向抖动噪声抑制方面,Heinzel 等人通过采用由伺服系统控制的迈克尔逊干涉仪自动对准系统进行了激光指向抖动噪声抑制,实验研究结果表明指向抖动噪声低于10nrad/√Hz@0.1Hz-100Hz;Hyde等人设计了激光指向抖动噪声抑制的时域仿真系统,仿真结果显示指向噪声的抑制水平可达到4nrad/√Hz;本研究小组董玉辉等人通过利用差分波前传感技术(differential wave-front sensi-tivity,DWS),将幅值为5μrad、频率为10mHz的正弦激光抖动输入信号抑制到100nrad/√Hz@1mHz-1Hz以下。在TTL耦合噪声抑制方面,Tröbs、赵亚以及Chwalla等人,采用由凹凸透镜组成的成像系统进行了相关的研究,证明了TTL耦合噪声会导致光程变化,引入成像系统可有效抑制该噪声至±25μm/rad@±300μrad以内。纵观国内外的研究成果,针对“太极计划”需求的宽、低频率范围(0.1mHz-1Hz)的激光指向抖动噪声抑制效果尚需进一步改进;由于采用凹凸透镜组合成像系统抑制TTL耦合噪声的技术方案存在光路调控难度大、成像系统设计要求高等缺陷,因此需进一步优化该成像系统的设计方案。

2 激光指向抖动噪声抑制系统
如图1所示,基于DWS技术的激光指向抖动噪声抑制系统主要由比例-积分-微分(proportion integration differentiation,PID)控制器、QPD、快速控制反射镜(fast steering mirror,FSM)组成。在系统运行的过程中,首先,由QPD探测、相位计读出、DWS技术计算得到远端传播激光和本地激光之间的相位差信号Δθ,并转换求出它们之间的偏角α (计算方式如等式(1)),然后通过PID控制器调控FSM对α进行角度补偿,使得本地激光平行于传播激光,降低激光指向抖动噪声对激光干涉测量精度的影响。

(1)
其中,=0.5mm为QPD的光敏面半径,=1064nm为激光波长,为与之间的转化因子(由特性可知,理论上,水平、垂直方向的转化因子==),代入QPD及激光参数,由等式(1)可得K ≈ 2506。因为用相位计读出的Δθ精度可达到μrad/√Hz量级,所以由等式(1)可知,α的测量精度可达到nrad/√Hz量级。

图1 激光指向抖动噪声抑制系统原理图
2.1 系统建模
如图2(a)所示,本系统中使用的FSM是由德国PI公司研制的二维反射镜平台S-330,具有水平、垂直2个方向的偏转度,内部的精密位移检测传感器由压电陶瓷微位移器构成。该FSM输出位移信息转化为角度信息后的传递函数为

(2)
其中=12N/μm,=07,=9600rad/s。
如图2(b)所示,系统中QPD是中国电子科技集团公司第四十四研究所开发的一款四象限弱光探测器。根据QPD的参数计算出其传递函数为


(3)
其中=27,=24,=51,==10,=01。
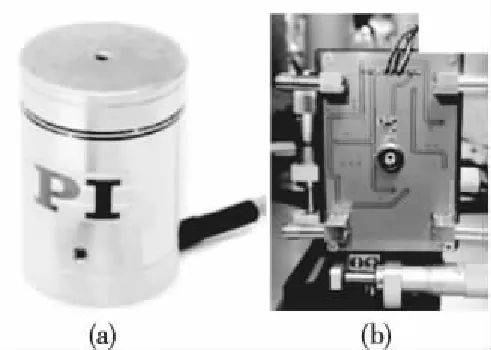
图2 实物图(a)S-330;(b)QPD
PID控制器传递函数为

(4)
其中,,,是要确定的控制参数,需根据实际系统性能进行调整确定。
如图3所示,基于以上构建的各模块系统传递函数并结合其功能,在Simulink中搭建了激光指向抖动噪声抑制系统。该系统以含抖动信号的传播激光入射到QPD的方向作为参考,对α(系统输入量)进行高精度测量,根据测量结果调整本地激光使其平行于传播激光以便产生稳定的干涉信号;系统输出量为噪声抑制水平。
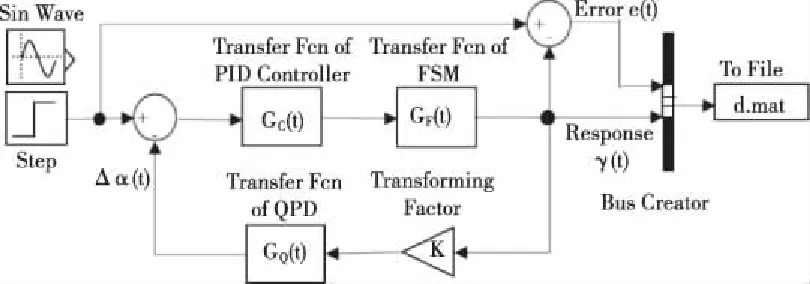
图3 激光指向抖动噪声抑制系统仿真模型
2.2 仿真与分析
经多次调试后,确定了该系统的最佳PID参数:=768,=1*10,=0。如图4(a)显示了在α(t)=300μrad的阶跃输入响应(图中虚线)下系统的时域仿真结果,其中实曲线代表系统的输出响应曲线,点画线代表输入信号和输出信号之间的误差信号。从图4(a)可以看出:
1)系统的稳态误差接近于零;
2)稳态响应γ(∞)可以达到300μrad;
3)调整时间为0.617ms;
4)计算得超调量为4.556%。
由此可知,控制系统工作状态良好,且调整时间短、超调量小、稳态误差小。
基于时域仿真确定的PID控制器参数,将输入信号设置为α(t)=5*sin(0.02πt)μrad的正弦信号模拟传播激光携带的抖动噪声大小,并用MATLAB程序对输出数据进行处理,得到频域内的噪声水平。为了准确评估结果,使用由德国马普协会爱因斯坦研究所开发的线性幅度谱密度(line amplitude spectrum density,LASD)方法处理输出数据。图4(b)显示了频域噪声处理结果,由此可知,激光指向抖动噪声≤ 0.1nrad/√Hz@ 0.1mHz -1Hz,该结果优于“太极计划”的要求,并为后期的物理实验提供了理论指导。
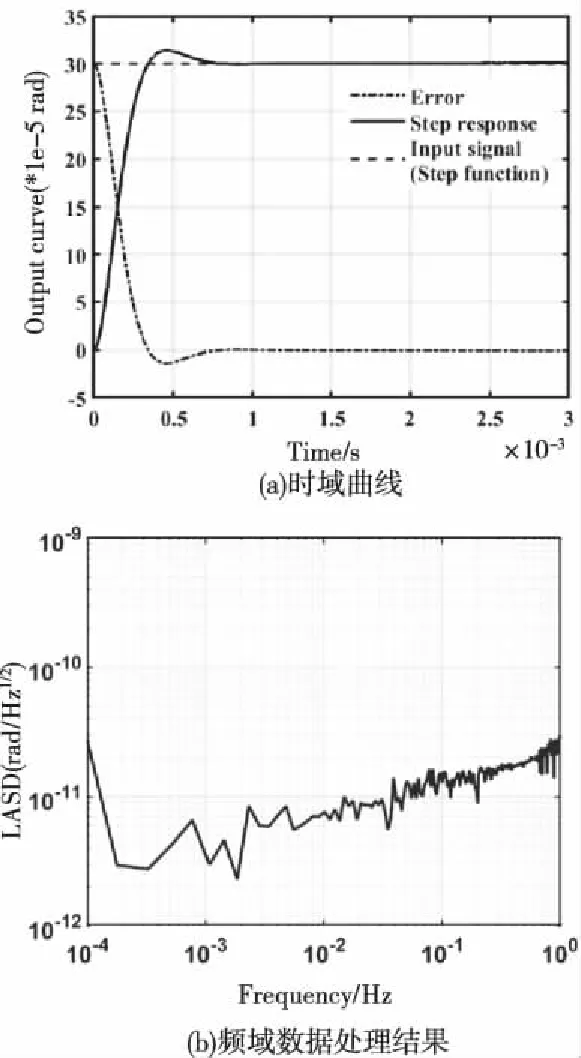
图4 激光指向抖动噪声抑制仿真结果
3 TTL耦合噪声抑制系统
3.1 系统设计
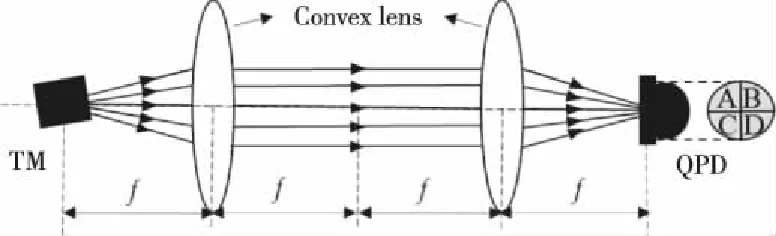
图5 TTL耦合噪声抑制系统原理图
如表1所示为该系统中所使用的双凸透镜(两透镜完全相同)的参数,其型号为Thorlabs LB1757-C,材质为N-BK7,折射率为1.50669,这款透镜是根据太极任务地基实验中使用的QPD孔径大小(半径为0.5毫米)和光学平台尺寸大小(半径为29厘米)设计的。

表1 4成像系统中双凸透镜的参数
3.2 仿真与分析

1)如图6(a)所示,仿真得到该过程中从-300μrad到300μrad,增量为10μrad的测量激光和水平方向传播的参考激光的传播路径;
2)如图6(b)所示,利用共轴球面光学系统成像计算公式求得测量激光与参考激光之间的光程差,即纵向光程信号;
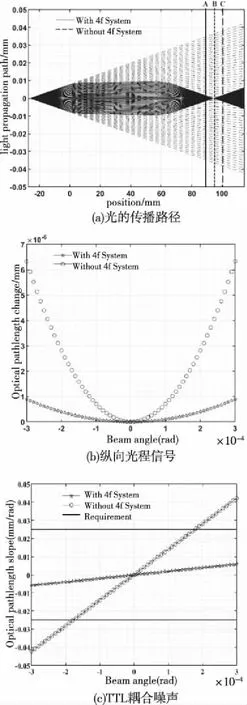
图6 TTL耦合噪声抑制仿真结果
分析结果可知,图6(a)中,A、B、C分别代表QPD光敏面在物理实验中的三个不同位置。其中A为本文仿真系统中QPD所处的位置(理论计算出的像方焦平面处),B为使得TTL耦合噪声为0的位置(实际成像系统的像方焦平面位置),C和A关于B对称。由此可知,物理实验中将QPD放置于A、C之间(大约12 mm的距离)的任意位置时,都有TTL耦合噪声≤ ±6 μm/rad @±300μrad。由此可知,该设计相较于目前文献中所使用的由凹凸透镜组成的成像系统的优势是:TM、QPD及凸透镜组的相对位置根据透镜焦距即可确定,且QPD的位置可调。
4 结束语
本文依据空间引力波探测“太极计划”中对激光干涉测量精度的要求,设计了两个仿真系统,研究了激光抖动和TTL耦合这两个影响干涉测量精度的噪声可被抑制到的水平。仿真结果可得:
1)激光指向抖动噪声≤ 0.1nrad/√Hz@0.1mHz-1Hz;
2)TTL耦合噪声≤ ± 6μm/rad@±300μrad;
3)以上噪声水平不但可以满足“太极计划”的要求,而且为空间实验中可能存在的其它噪声留有足够的噪声裕量;
4)相应的物理实验搭建简便、数据测量精度高、稳定性好,为后期建立空间“太极计划”激光干涉测量系统奠定了一定的基础。