电容层析成像技术研究进展
2022-10-23姚佳烽车权齐李志伟刘凯
姚佳烽,车权齐,李志伟,刘凯
(南京航空航天大学 机电学院,江苏 南京 210016)
0 引言
过程层析成像(process tomography,PT)技术是一种以非侵入性的方式测量感兴趣区域的过程化参数并获得容器反应过程或管道内部流动特征的技术[1],包括电阻和电容层析成像(electrical resistance and electrical capacitance tomography)技术、X射线断层扫描(X-ray computed tomography,X-CT)技术、磁感应断层扫描(magnetic induction tomography,MIT)技术、超声过程层析成像(ultrasonic process tomography,UPT)技术等。PT技术涉及到多个应用领域的研究,例如工业上的多相流参数监测、石油勘探、无损检测等,医学上的人体肺部换气成像、影像诊断、脑部成像等[2-3]。
电容层析成像技术(electrical capacitance tomography, ECT)属于PT技术的一种,是通过测量管道内部两相流或多相流的介电常数分布反映介质分布的过程,主要应用于工业中循环流化床的气固流动检测、水平管道中油/水两相流的检测和火焰燃烧检测等[4]。ECT技术具有非侵入性、无辐射、成本低、响应速度快等特点,被认为是一种最具有潜力的过程层析成像技术之一。
近些年来,ECT技术发展迅速,在工业和生物医学领域取得了重要成就。本文主要从ECT技术的新型电容传感器、硬件设备、图像重建算法以及技术应用等方面进行总结,并对其未来发展趋势进行了探讨和展望。
1 电容层析成像设备
20世纪八九十年代,曼彻斯特大学BECK教授的研究团队首次搭建了一套基于8电极传感器的电容层析成像系统[5],如图1所示,并在之后开发了一套图像重建算法的软件工具,为后续的研究打下了基础。电容层析成像系统主要由电容传感器、数据采集模块和图像重组单元构成。由电容传感器感受微弱的电容信号,经C/V转换电路、放大电路、滤波电路和A/D转换电路等转换为计算机可识别的二进制信号,再通过图像重建算法实现可视化成像。ECT成像技术经过30多年的发展,已经形成较为完善的软硬件系统。

图1 首台ECT系统
1.1 ECT传感器
电容传感器是ECT系统的重要组成部分,在结构上主要分为二维传感器和三维传感器。如图2(a)所示,传统的二维结构传感器主要由分布在管道周围同一横截面上的阵列电极、横向和纵向屏蔽网络组成,在此基础上布置多层电极就形成了三维结构传感器。传感器的性能直接影响到电容测量和敏感场的分布,最终影响到图像重建的质量。对于电容传感器的优化设计,大多数研究者主要是从电极形状、数量和尺寸等参数上进行改良和对比[6-7]。但是在实际工业应用上,传感器自身参数会受到工作条件的限制。因此,基于传统结构设计新型电容传感器十分重要。
分布在管道周围外部的ECT传感器往往不能满足对中心区域的成像效果。2019年,CUI Z Q等提出了一种具有8个外部电极和8个内部电极的ECT传感器[8],如图2(b)所示,8个内部电极放置在被测管道的交叉平面上,传感器的横截面测量区域可以看作是4个相等的扇形区域,每个扇形区域被6个电极包围。通过数值模拟和实验表明,这种内外部电极结合的方式相对于传统的12电极传感器,在测量灵敏度和成像质量上都有明显提高,但是由于侵入测量,会对管道内部的流体产生干扰,并且其潜在应用性也会受到限制。如何最小程度地减小内部结构对流体的干扰是这类传感器研究的方向。
3D传感器相比于2D传感器可以获取流体的体积图像,这种3D-ECT也称为电容体积断层扫描(electrical capacitance volume tomography,ECVT)技术,对于研究像流化床中气泡大小、速度以及运动轨迹等这类问题具有重要价值[9]。由于3D-ECT获取的独立投影数据更多并且相距较远的电极层之间的信号更加微弱[10],这对于图像重建过程和高质量成像是一项严峻的挑战。因此,3D传感器的设计参数备受关注,比如不同平面的电极数量、电极角度分布、电极长度等[11-13]。2020年,SHEN J J等研究了具有不同排列和不同形状电极的3D-ECT传感器[14],如图2(c)所示,包括交错排列的菱形、圆形、六边形电极传感器以及直线排列的矩形电极传感器。结果表明,与传统矩形电极相比,具有交错排列电极的3D-ECT传感器可以减少对被测信号的干扰,有助于提高成像质量。
单模态断层扫描适用于两相流检测,但是无法提供多相流中各组分的分布信息,例如气-液-固(G-L-S)和气-油-水三相流等。双模态断层扫描技术已经被开发,WANG Q等提出了一种双模态电阻和电容断层扫描(ERT-ECT)的新方法[15],用于可视化水平管道中的气-油-水流动;STAVLAND S H等采用双平面电容和伽马射线断层扫描(ECT-GRT)技术进行多模态气液两相流速度的测量[16],将ECT高速采集速率和GRT高空间精度的优势互补,提高了测量的时间分辨率和空间分辨率。但是这两种方法只是在两个临近平面上实现了两类传感器的组合测量,结构较为复杂。CUI Z Q等研发了一种集成的双模态电容和电磁断层扫描(ECT-EMT)传感器[17],可实现对G-L-S三相流成像。如图2(d)所示,传感器主要由分布在管道同一横截面的阵列电极和阵列线圈组成,EMT平面线圈放置在ECT电极的外侧并形成了对内侧电极的屏蔽,对电容测量的影响很小。但是这种传感器的主要局限性在于,当激励信号的频率过高时,ECT电极会对EMT测量产生很大的影响。因此,需要限制激励频率和数据采集速率。
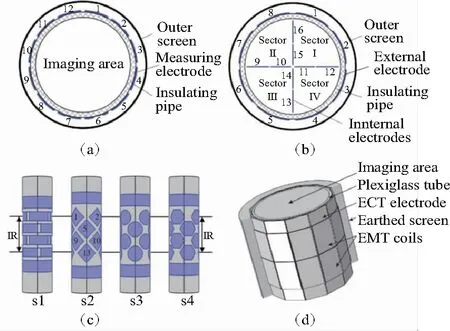
图2 新型传感器
ECT系统的电容传感器正朝着三维化、集成化和多模态方向发展。新型传感器的优化设计对于减小测量误差、提高图像质量具有重要意义。
1.2 ECT硬件设备
电子硬件设备主要包括电容测量电路、多路复用电路和控制处理单元,其功能是实现电容信号的采集、转换和传输以及控制通信等,这对于测量分辨率和数据采集速度提出了较高的要求。
常见的电容测量电路有直流充放电电路、交流锁相放大电路和电容数字转换器(CDC技术)等。由于电容信号一般在pF级别,测量误差较大,因此如何减小噪声的干扰是一个关键问题。YANG W Q等提出了一种高灵敏度的交流电容测量电路[18],基于该电路的ECT系统测量精度达0.01 pF,测量误差为0.000 2 pF。STYRA D对基于交流激励的电路进行了改进[19],如图3所示,采用带有开关反馈电荷放大器实现信号的转换,灵敏度有所提高,但是会导致电路中存在相对较大的杂散电容。对于测量精度、测量范围和响应时间等参数的优化,还需要进行更广泛的研究,以便完善系统的功能和完整性。

图3 带有开关反馈的电荷放大器
在ECT系统中,每个电极存在激励、测量和接地3种模式。这些电极通过多路复用电路开关被连接到电压源和电容测量电路的两端。数据采集方式分为单通道串行和多通道并行两种。单通道串行采集是由一个电压源激励,其余电极依次进行采集,这种方式只需要一个数据采集端(DAQ),成本低,传输便捷,但是会降低采集速度和时间分辨率;多通道并行采集是由一个电压源激励,其余电极同时采集,这种方式的时间分辨率高,但是需要多个DAQ,系统复杂、成本高,数据传输负担加重。GAO R X等提出了一种多激励并行采集模式,也称MECap系统,如图4所示[20],以8电极传感器为例,使用4个信号发生器对4个电极同时施加不同频率的激励电压,其余4个电极同时进行采集,采集的信号经过电荷放大器后,通过8选4多路复用器进入到4个锁相放大器(LIA),每个LIA由低通滤波器、移相器和模拟乘法器组成,通过与相应的函数发生器进行同步并根据指定的频率对输入信号进行滤波。这种方法比传统ECT系统的成像速度更快,更准确,并且具有较高的灵敏度。

图4 MECap系统原理图
数字信号处理器(DSP)通常作为ECT系统数据处理和控制的核心,是一种可编程的芯片。WANG H X等采用TMS3206416处理器对16电极的ECT系统进行控制,图像帧率在200 fps左右。最近,FPGA处理器被广泛使用,系统配置如图5所示[21],其优点是可以托管重建算法的大部分控制/数据流,不需要一系列顺序存储器的访问。2015年,FAJAR FIRDAUS A等提出了一种基于FPGA技术的ECT层析成像算法的新架构[22],可同时执行3种图像重建算法。大量仿真表明,当重建算法在基于2.53 GHz 的奔腾处理器上运行时,所提出的架构计算速度提升了3个数量级。2018年,MAJCHROWICZ M等开发了一种多图形处理系统(GPU)、多节点分布式的3D-ECT成像系统[23],与之前开发的基于Xgrid平台的分布式系统进行了比较,其处理速度明显提高。

图5 基于FPGA测量的系统配置图
2 ECT图像重建算法
ECT技术的图像重建实质是对逆问题的求解,即根据电容传感器测量的电容值求解敏感场内介电常数的分布。由于测量的独立投影数据远远少于图像的像素点,导致其解不唯一,属于欠定性问题。ECT系统本身固有的软场特性会造成求解的非线性问题,而电容值微小的变化会引起介电常数的分布发生很大变动,这是病态性问题。面对图像重建这三大问题,选择合适的处理算法直接影响到成像质量的好坏。ECT技术的图像重建算法理论上可分为3类:非迭代算法、迭代算法和智能算法。
电容值C与介电常数ε分布的关系可以表示为[24]

(1)

将N个电极测量的M个独立投影数据代入到式(1)并对其进行线性化、离散化和归一化处理后得
C=SG
(2)
式中:C为归一化的电容值矩阵,m×1维;S为归一化的敏感场矩阵,m×n维;G为归一化的介电常数分布矩阵,也称像素灰度值矩阵,n×1维。
由电容值矩阵C和敏感场矩阵S求解介电常数矩阵G的分布即为ECT的图像重建。
2.1 传统算法
非迭代算法和迭代算法是基于线性模型的ECT图像重建算法[24]。非迭代算法主要有线性反投影(LBP)算法和正则化方法[25-26]。迭代算法主要有代数重建技术(ART)、同步迭代重建技术 (SIRT)和Landweber迭代法等[27-28]。本文主要对两类算法中具有代表性的Landweber迭代法和正则化方法进行了介绍和总结。
Landweber是一种类似于优化理论中最陡梯度下降法的迭代算法,其迭代公式为[29]
Gk+1=Gk+αkST(C-SGk)
(3)
式中αk为迭代步长,为减小计算量,一般设为固定值。
Landweber算法具有较高的成像精度和速度而被广泛地应用[30]。Landweber算法的局限性在于收敛性差。为改善其收敛性能,一些研究者给出了改进措施,例如,采用投影法和更新灵敏度矩阵减少迭代次数[31];将PI控制器与Landweber方法集成(Landweber-PI)[32],改善半收敛性,提高稳定性和图像质量;在Landweber中加入正则项,减小计算量,提高收敛速度[33];通过Landweber算法与弛豫因子和迭代次数的自适应选择提高图像重建的精度和效率[34]。还有研究者通过改善收敛条件实现快速成像以及从共轭梯度角度对Landweber法进行延伸[35-36]。
正则化方法的基本思路是在先验条件的约束下,用一组与原不适定问题相“邻近”地适应问题的解去逼近原问题的解。其表达式为
(4)
式中:λ为正则化系数;L为正则化矩阵。
式(4)的近似解为
(5)
正则化最小二乘问题的一般形式是:
(6)
式中R(G)为正则化项。
正则化方法可以分为投影法和惩罚法。投影法是将逆问题的解投影到一个特定的子空间,例如截断奇异值分解法。惩罚法是在目标函数中添加一个正则化项,保证解的稳定性。在惩罚法中,常用的正则化方法有Tikhonov正则化、Total Variation (TV)正则化和first-order Tikhonov (FOT)正则化等[37]。Tikhonov正则化是解决欠定性逆问题最常用的手段之一,基于标准Tikhonov正则化的解为[24]
(7)
式中:μ为Tikhonov正则化因子;I为单位矩阵。
Tikhonov正则化质量主要取决于参数μ,通常情况下μ是根据经验值来选择的。
TV正则化方法是用来保持图像边缘的不连续性,但是受噪声影响较大,其正则化项可表示为[37]

(8)
FOT正则化方法可以提高成像的稳定性,但是导致图像边缘过度平滑,其正则化项可表示为一阶微分算子的形式[37]:
(9)
这些传统的算法大部分都是基于线性模型,运用迭代或者非迭代方法去寻找问题的最优解。但是当成像目标较为复杂、数据量过大时,这些方法在运算成本和效率上会大大降低。而基于非线性模型的算法,其图像重建的速度非常慢,无法满足时效性的要求。
2.2 人工智能和机器学习算法
近些年来,人工智能算法和机器学习理论蓬勃发展,应用于各项领域。ECT技术领域的研究人员也将这些基于深度学习的方法扩展到解决这类非线性的逆问题上,这也是图像重建算法未来的发展趋势。
基于神经网络的学习算法在对非线性信号的处理中展现出了良好的效果。2012年,LI J W等提出了一种基于径向基函数(RBF)神经网络的图像重构方法[38],通过仿真软件获得测量数据并和BP神经网络算法进行了比较,每个神经网络具有180个样本训练集。结果显示,RBF方法速度更快,精度更高。2018年,ZHENG J等提出了一种自动编码神经网络来求解ECT的图像重建问题[39],该网络包括一个编码器网络和一个4层的解码器网络,共有40000对样本训练和测试数据集,图像重建效果较好,为解决ECT成像问题提供了可行性。2019年,CHEN E等在自动编码模型的基础上使用模块化深度神经网络(MDNN)进行图像重建,并应用到了多级重建方案中[40]。2021年,DEABES W等提出了一种基于长短期记忆(LSTM)深度神经网络的ECT重构算法[41],简称LSTM-IR算法,如图6所示。通过对创建的16万对大规模仿真数据集进行训练和测试,结果表明,LSTM-IR方法能够更快速、精确地创建ECT图像。

图6 LSTM-IR算法体系结构图
一些其他基于机器学习的算法也有被开发。2012年,WANG H M等提出了一种最小二乘支持向量机(LSSVM)结合细菌菌落趋化性(BBC)的算法[42],用于检测燃烧器喷口过渡流状态的细微变化。通过LSSVM建立的从测量电容到图像灰度值的非线性映射模型具有良好的非线性学习能力和较高的收敛速度,采用具有全局优化和快速收敛能力的BBC算法来构造核参数的目标优化函数,最后收集了112组训练样本集并实现了图像重建。2017年,LEI J等提出了一种基于深度学习的反演方法[43]。成像包括三个阶段:第一阶段,从重建图像到真实图像的先验信息被抽象并存储在深度极限学习机器(DELM)中;第二阶段,构建了一个成本函数,用于封装深度学习模型和成像目标领域先验的专业知识;第三阶段, 将split Bregman (SB) 算法和快速软阈值迭代(FIST)算法组合成一种新的数值方法求解。这种算法减少了图像的伪影和变形,但是在计算效率和实际应用等问题上还需要进一步研究。
训练样本量对机器学习的结果至关重要。2017年,ZHENG J等提出了一种用于ECT图像重建的数据生成平台[44]。在MATLAB 上构建了图形用户界面(GUI),并与COMSOL Multiphysics 5.0中的ECT传感器模型配合使用,目前已经生成了37 850对样本数据集。这种数据生成平台可以生成包括任何流型中介电常数分布和相应电容数据的大规模数据集,这对于基于机器学习方法的探索和测试以及未来基于大规模数据集来研究新的ECT图像重建算法具有重要意义。
3 ECT技术应用
ECT广泛应用于工业中的多相流检测,例如气固两相流中颗粒浓度和速度的动态分布、气泡大小和气泡动态特性以及材料中的水分分布等[45]。在生物医学领域,ECT技术在人体组织成像方面表现出了潜在的应用价值,像乳腺癌扫描和牙齿成像检测等[46]。
3.1 工业应用
流化床是一种利用气体或液体使固体颗粒处于悬浮运动状态的反应装置,主要分为气固流化床和液固流化床,是ECT技术的典型应用。循环流化床(CFB)是一种气固流动系统,常用于锅炉中的煤燃烧和煤气化[47]。由于气固流动动力学会影响煤的燃烧效率和污染排放,因此对流体流动参数和运动状态的测量非常重要。ZHAO T等使用ECT系统对垂直管道中流体催化裂化过程中催化剂颗粒的运动速度和分布等信息进行成像[48];也有研究者比较了ECT和压力波动测量这两种方法,对流化床内最小流化速度、最小流速、主频率和气泡上升速度等流动参数进行测定,结果表明两种测量方法的结果大致吻合[49]。此外,还有研究者对流化床中不同区域的流动状态进行了测量,如图7所示,包括立管底部的密集流动、立管顶部的稀薄流动、旋风分离器入口处的流动、旋风分离器中旋转和湍流流动以及循环密封腔中的流动等[47]。ECT在制药流化床、锥形喷嘴床和滴流床等也有相关应用[50-51]。
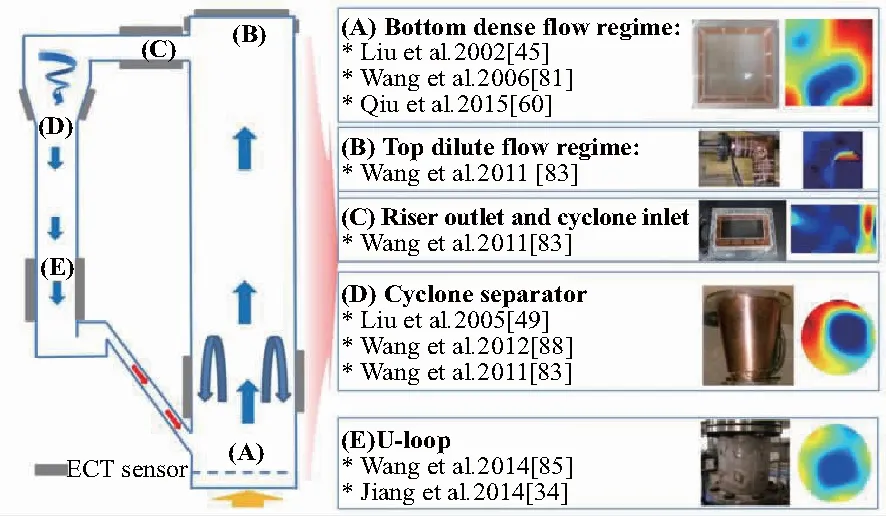
图7 CFB的5种典型流型
ECT的大多数应用都集中在“冷”的气固流动上,而对于工业上的火焰燃烧检测研究较少。2018年,LIU J等使用ECT结合数据融合分析进行了火焰成像[52],但是只是对燃烧过程的定性评估,很难获得详细的定量信息。这是因为火焰的介电常数来自于燃烧过程中产生的化学成分、火焰内部的温度和压力以及某些等离子,这些因素都会影响火焰的介电常数和电导率,很难从单方面测量中获得介电常数分布。
3.2 医学应用
ECT技术因其无辐射和快速成像的特点,适用于医学上的实时成像检测。2012年,TARUNO W P等使用(ECVT)成像技术对人体乳房内的癌细胞块进行实时3D成像[53],重建的图像在健康和异常组织之间产生了明显的差异,有望作为用于乳腺癌筛查的快速、高效、非辐射技术的替代方案。次年,该研究团队首次提出了一种基于ECVT的人脑活动实时成像方案[54],如图8所示,通过测量人脑活动产生的电信号重建脑信号的体积图像。结果表明,ECVT能够检测与人类运动和语言功能相关的大脑活动。
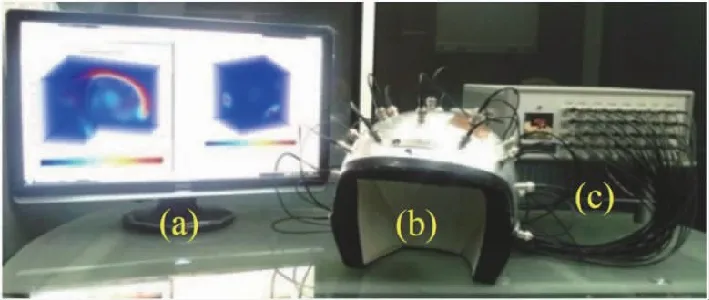
图8 ECVT人脑检测系统
2017年,REN Z等提出了一种使用ECT可视化牙齿表面的新方法[55]。该项研究工作者考虑到口腔空间和牙齿尺寸等方面因素的限制,设计了一种平面开放结构的ECT微型传感器,如图9所示,在柔性印刷电路板(FPCB)上制造了2×2阵列和2×3阵列的微型电极,检测时通过夹具组件将传感器固定在口腔内牙龈表面的两侧,然后使用基于阻抗分析仪的ECT系统测试单个前臼齿,并运用LBP和Landweber迭代算法实现了对单齿横向和纵向截面的图像重建。未来,这项工作主要集中在用颌骨成像目标牙齿和导航牙髓仪,确定牙科器械的位置。有望成为一项用于牙髓治疗的实时成像技术。
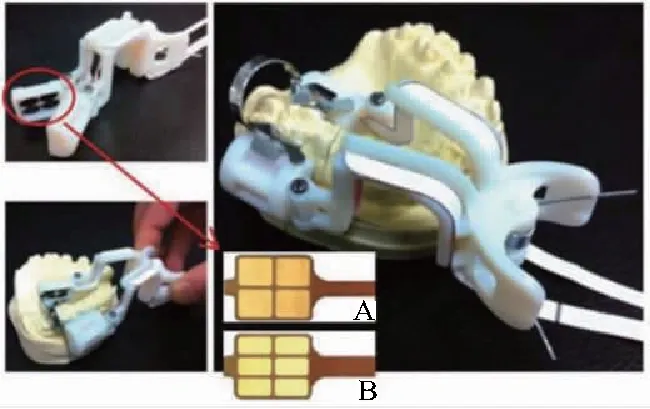
图9 FPBC传感器和牙齿夹具
4 ECT的发展趋势
ECT技术作为过程层析成像领域的热门课题,受到越来越多学者的关注。对于ECT技术的发展趋势,主要呈现在三个方面:设备上趋向小型化、智能化;人工智能和机器学习算法将成为主流算法;应用方向将逐步拓展到生物医学领域。
1)小型化、智能化
小型化是目前大多数工业设备的发展方向。应用于工业上的ECT传感器,其直径通常>1 m,测量系统体积庞大复杂、检测维修费用高,并且传感器的电极间距过大,会导致测量的信号微弱,引起较大的误差。而设备的小型化会大大降低成本,这需要从传感器和硬件设备的结构、尺寸等角度进行优化改良,便携式的ECT系统将会带来更多领域的潜在应用[55]。ECT系统过程层析成像的特点使其在成像速度上具有一定的限制,这也是其他过程层析成像技术普遍存在的问题。随着GPU系统和5G技术的发展,硬件设备趋向智能化、自动化,这对多模态成像以及多项PT技术的融合具有重要意义。
2)人工智能和机器学习算法
大数据时代的发展离不开人工智能和机器学习,这些算法已经较为成熟,能够对图像进行快速地分析和分类。基于机器学习的算法可以大幅度提高成像质量,并且在控制回路中对实现快速反馈和决策提供了强大的支持。训练样本量是机器学习算法的重要基础,因此,通过仿真模拟建立大数据生成平台也是一项具有挑战性的工作。
3)生物医学发展
ECT技术的非侵入性、无辐射、响应快等优势在生物医学领域表现出良好的发展态势。人体的某些组织器官在介电常数上具有显著特性,例如大脑活动产生的电信号、肿瘤组织以及牙齿等。也有些研究者通过尝试利用技术融合的方法应用于医学上的检测,例如目前曼彻斯特大学和千叶大学正在进行一项联合研究,通过ECT和EIT的组合来诊断淋巴水肿[46]。另外,成本低将会是ECT在医学成像技术中的竞争优势之一。
5 结语
ECT技术的理论研究已经较为成熟,并且在工业领域也有广泛的应用,但是由于实际因素以及图像重建的病态问题等,还需要对硬件和算法上进行改进和优化。本文针对ECT系统中新型电容传感器、硬件设备、图像重建算法和技术应用等方面的基本框架和最新研究进展进行了总结和分析。目前,ECT硬件设备正朝着三维化、小型化、智能化和多模态方向发展,获取更多、更准确的图像信息成为了大多数研究者努力的方向。图像重建算法更趋向于人工智能和机器学习,大规模训练样本的需求也促成了数据生成平台的构建。未来,随着5G技术和成像软件的发展,ECT系统在成像速度和质量上将会明显提高,并以其无辐射、成本低等优势逐渐拓展到生物医学领域的研究和应用。
