基于DSP的单铁磁悬浮实验平台设计与实现
2022-10-22唐晓丹廖景雯胡淑怡
唐晓丹,何 青,聂 焕,廖景雯,胡淑怡
(长沙理工大学电气与信息工程学院,湖南 长沙 410000)
0 引言
中低速磁悬浮列车是我国新型绿色出行方式,是未来城市交通发展的重要方向。目前中低速磁浮列车主要采用了电磁型磁悬浮系统(Electric Magnetic Suspension,EMS),由于该系统为非线性时变系统,需要通过外加主动调节来保持悬浮系统电磁力浮力稳定状态。磁悬浮系统控制器是稳定悬浮的关键技术,决定是否具备悬浮条件以及直接影响悬浮控制效果。佘龙华等对磁悬浮列车磁悬浮控制系统通过机械解耦的方式转化为单铁悬浮控制的方案展开磁悬浮系统控制问题研究。
本文设计了一个单铁磁悬浮实验平台,简化了低速磁浮列车悬浮控制问题研究,设计与使用磁悬浮实物装置进行调试,进一步验证自主设计的控制器可行性。
1 磁悬浮控制原理及其模型
磁悬浮控制原理在于利用通过电磁铁线圈绕组的电流,使绕组产生与导轨相互吸引的电磁力,与车厢本身的重力相互平衡以达到支撑车厢的悬浮状态,主要通过传感器采集电流、间隙等反馈信号传送至控制器,控制器判断实际数据与悬浮给定值差值进行调整控制,最终使得电磁铁整体悬浮,如图1所示。
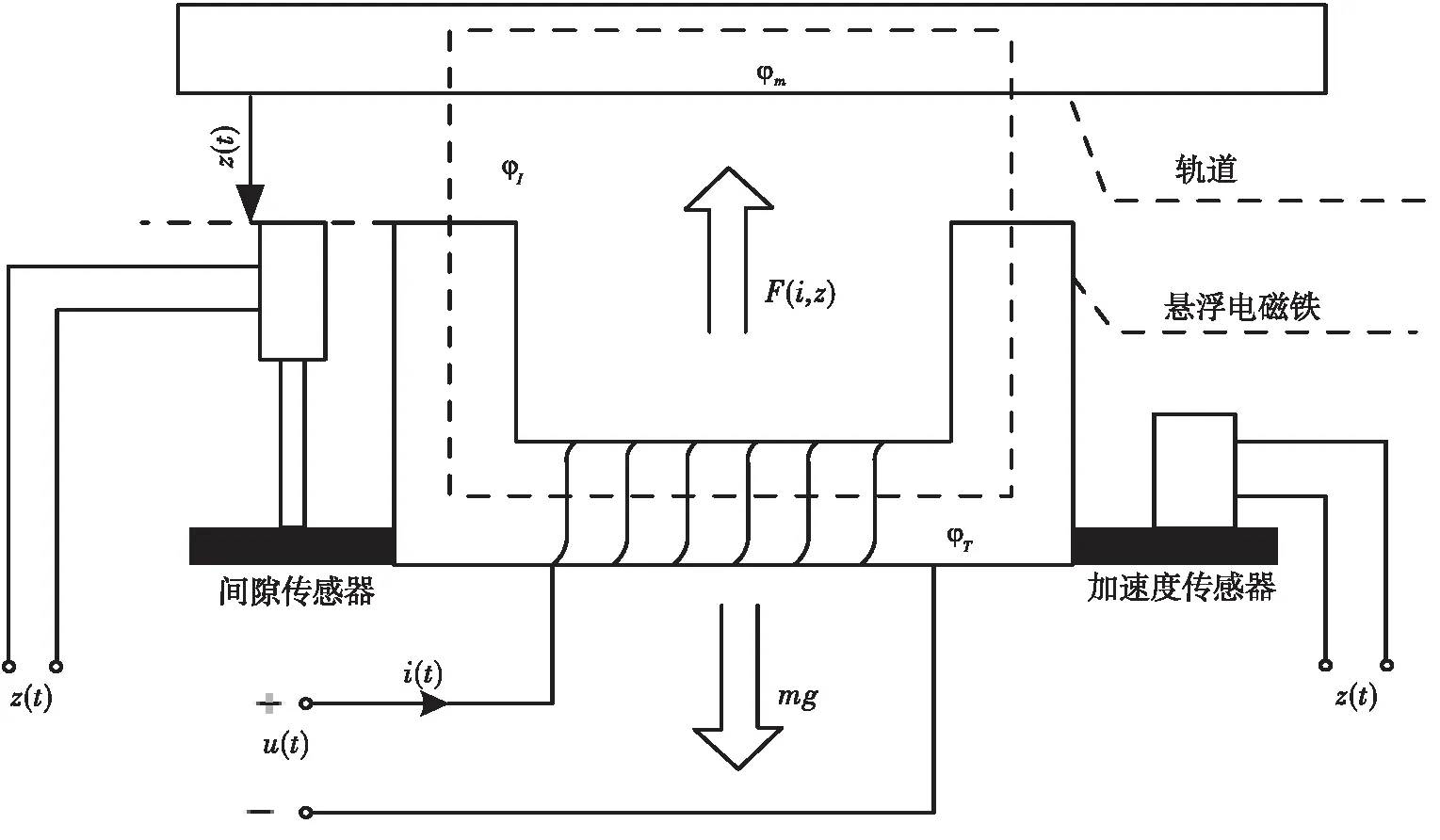
图1 单铁磁悬浮实验平台原理图
若漏磁通量、铁磁阻大小、导轨的磁阻大小忽略不计,其数学模型如下。
(1)
(2)
(3)
式中:符号z(t)为悬浮间距即电磁铁与钢轨之间的距离;i(t)是电磁铁线圈电流大小;F(i,z)表示电磁力大小;Δi为电流的变化量、Δz为气隙的变化量;悬浮平衡点(i0,z0);电磁铁及其承载的总质量为m;重力加速度为g;A为铁芯极面积;N为电磁铁线圈匝数;R为电磁铁线圈电阻;μ0为空气中的总磁导率。
2 系统硬件设计
系统硬件由机械结构、电气控制两大模块构成。机械结构模块由电磁铁、支架、轴承等部分组成;电气控制模块是以DSP控制芯片为核心及其外围模块电路部分组成。机械结构如图2所示。
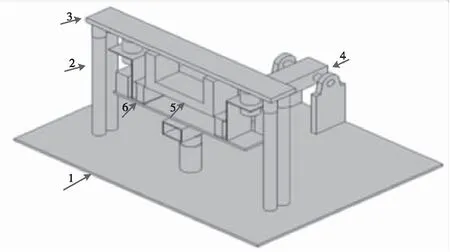
1—底座;2—钢架;3—钢轨;4—支架和轴承;5—铜线圈和铁线构成的绕组(电磁铁);6—传感器和固定传感器所用的支架。图2 单铁悬浮轨道实验平台3D模型图
为了实现对电磁铁精确、稳定的控制,磁悬浮系统整体控制结构以DSP芯片为核心控制,使用电源模块为各个模块供电,主要包括传感器信号采集电路、电磁铁电路、保护电路、故障处理电路、通信电路等。综合考虑芯片性能、内部存储空间大小,最终确定选取型号DSP TMS320F28335芯片作为磁悬浮系统的主控芯片。
传感器模块、间隙传感器选择电容式金属距离传感器,即导轨作为被检测的对象,传感器本身检测表面和外界之间构成的电容器,存在初始振荡、停振状态,当测量表面间距逐渐减小,传输回路电容量变化,状态被转换为电信号,经过放大电路转换为二进制开关信号,最终以电信号的形式将两种状态输出,进而反馈出具体距离;加速度传感器,选择压电加速度传感器,具体选型为SA-IEC500;该传感器在压电加速度传感器电荷输出端接一个以场效应管为核心的IEPE电路,利用同一根线对其输出和恒流源进行供电,以一个直流量级为基础叠加一交流(振动)信号,以此来实现加速度的测量。
电磁铁控制电路模块,悬浮电流控制采用方形波式控制方式,输出电路设计上选用H桥作为输出电路,利用维持下桥接地MOS管的导通,控制上桥300 V与地的MOS管相互导通,可让电路输出300 V、0 V,并且可通过死区设置防止上下桥同时导通而使电路元器件烧毁。MOS管的选择为IPB60R099C6,其漏-源极最高可通过650 V的电压、导通阻值为0.099 Ω,通断周期为110 ns,符合系统对开关元件电压、频率的要求。
3 系统软件设计
3.1 双闭环控制算法设计
建立被控对象,控制器的搭建分为内环及外环,内环的PI控制器由比例控制与积分控制组成,通过比例与积分控制消除误差从而达到给定位置稳定;外环采取梯形积分模糊PID控制器。
3.2 系统程序设计
系统设计主要在于通过判断电磁铁的悬浮状态来调用控制子程序实现电磁铁悬浮。首先,系统初始化,配置外设引脚,对设定变量给定地址以及赋值。其次,进行使能中断,开启定时器、启动AD转换,以设定初始值驱动控制电磁铁起浮。最后,通过读取到的实时电磁铁状态数据,如间隙距离、加速度等重要数据判断悬浮位置,调整输出控制信号。
4 实验平台整体测试
4.1 平台整体功能测试
在完成系统各个模块单独调试基础上,将电磁铁各模块机械结构进行整体组装,经过整体平台测试,测试结果显示性能良好。各模块依次是电源板提供电源供给接收控制板的PWM控制信号;控制板输出PWM信号和接收处理信号;电磁铁由电源板输出的电流控制悬浮;采集电磁铁状态的传感器与显示状态的示波器,实物结构图如图3所示。
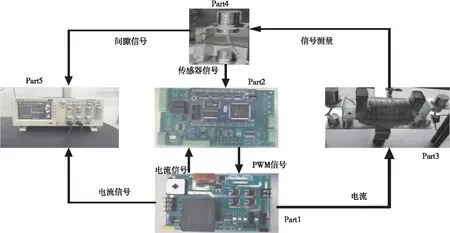
图3 仿真实验平台实物结构图
4.2 悬浮控制算法测试
采取内环PI控制器、外环梯形积分模糊PID控制算法进行了悬浮控制的实验,测量电磁铁浮起状态的间隙、电流波形图如图4所示。
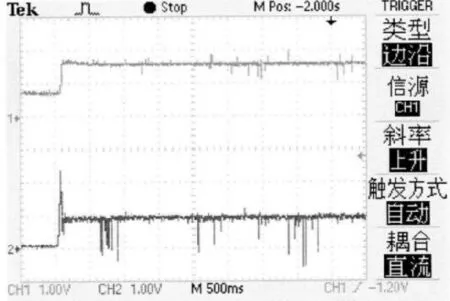
图4 电磁铁浮起间隙、电流波形图
根据实验结果下降时间、峰值时间、超调量参数显示,具有较高控制精度,且改善电流抖动;加入负载后抖动问题得到了明显的改善,动态性能、鲁棒性有明显提升。
5 结语
以磁悬浮列车悬浮控制系统为研究对象,通过机械解耦,对单铁磁悬浮控制系统开展硬件与软件设计,搭建实物平台并进行了整体测试。采用基于梯形积分模糊PID控制算法进行了悬浮控制的实验,实验结果显示该平台在系统性能、控制精度方面均实现了较好的效果,满足不同控制算法实验需求,为后续开展磁悬浮控制系统研究提供一个实用专业平台。
