绳驱动下肢外骨骼结构设计及运动学分析
2022-10-22林硕,刘庆
林 硕,刘 庆
(安徽理工大学,安徽 淮南 232000)
0 引言
下肢外骨骼康复机器人是一种穿戴在使用者下肢外部,为不同损伤状态、不同恢复状态、不同年龄和不同身体特征的下肢运动功能障碍患者在康复训练或自由行走时,提供具有准确合理助力、正确步态引导、全方位保护、身体支撑等特性的人机一体化系统,使患者在医院或家中均能进行科学的康复训练。
此外,机器人在稳定性、重复性方面有先天的优势。传统疗法的训练过程建立在定性观察的基础上,缺乏准确性、可控性和定量的数据,而康复机器人在制定科学的训练计划、提高训练效率等方面具有巨大的潜力和优越性。综上所述,基于外骨骼式的下肢康复机器人的研究具有重要的现实意义,拥有广阔的市场[1]。
传统刚性下肢外骨骼重量一般较大,可能会增加穿戴者的能量消耗;同时,刚性机构对关节的运动自由度会造成一定限制,进而会改变穿戴者的自然步态模式。为了避免刚性机构对关节的约束,减少系统重量,防止对人体的二次伤害,本文提出了一种基于绳-滑轮机构驱动的下肢外骨骼康复机器人[2]。
1 下肢外骨骼结构设计
1.1 绳驱动原理分析
通过查阅相关文献,只要使用比自由度多一根的腱绳数目就可以完全控制下肢各关节,因此本文主要采用n+1型绳索-滑轮方式进行驱动,采用此驱动方式,能够减少驱动电机的数量,降低整机复杂性,减小整机质量,降低成本。绳驱动原理图如图1所示,绳索与距离关节中心轴一定距离的关节进行固定相连[3]。
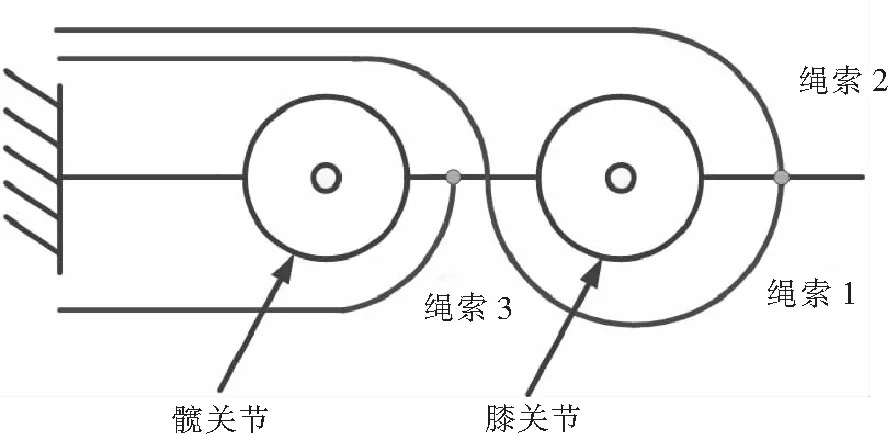
图1 绳驱动原理图
由绳索1、2共同控制膝关节的屈/伸,由绳索1、2、3共同控制髋关节的屈伸。因此,其结构矩阵可以表示为[4]:
其结构矩阵第1行第1列表示绳索1对关节1产生的力矩,第1行第2列表示绳索1对关节2产生的力矩,第1行第3列表示绳索1对关节3产生的力矩。其他同理:正负号代表产生不同方向的力矩。
1.2 下肢外骨骼整体结构设计
人体骨骼中的关节结构、关节的运动形式以及步行的运动特征等都是外骨骼型下肢康复机构设计的基本依据。无论机构是进行平面构型设计还是空间构型设计,都必须穿着于人体的骨骼框架之上,并要求保持机构结构与人体形态的统一协调,以满足人体运动的需要。
该下肢外骨骼整机构型如图2所示。下肢外骨骼主要由小腿内杆、小腿外杆、大腿内杆、大腿外杆、调节装置、滑轮、捆绑装置、驱动装置以及绳索组成。为了满足康复条件下简化下肢外骨骼设计驱动原理的目的,本文仅在膝关节以及髋关节处设计驱动装置,驱动装置(电机)放置在背部支撑板,绳索一端与电机连接,通过导向轮以及髋关节和膝关节的滑轮;另一端与下肢连接,由腱绳远程驱动下肢关节,拉动大、小腿绕关节轴旋转。其驱动示意图如图3所示。
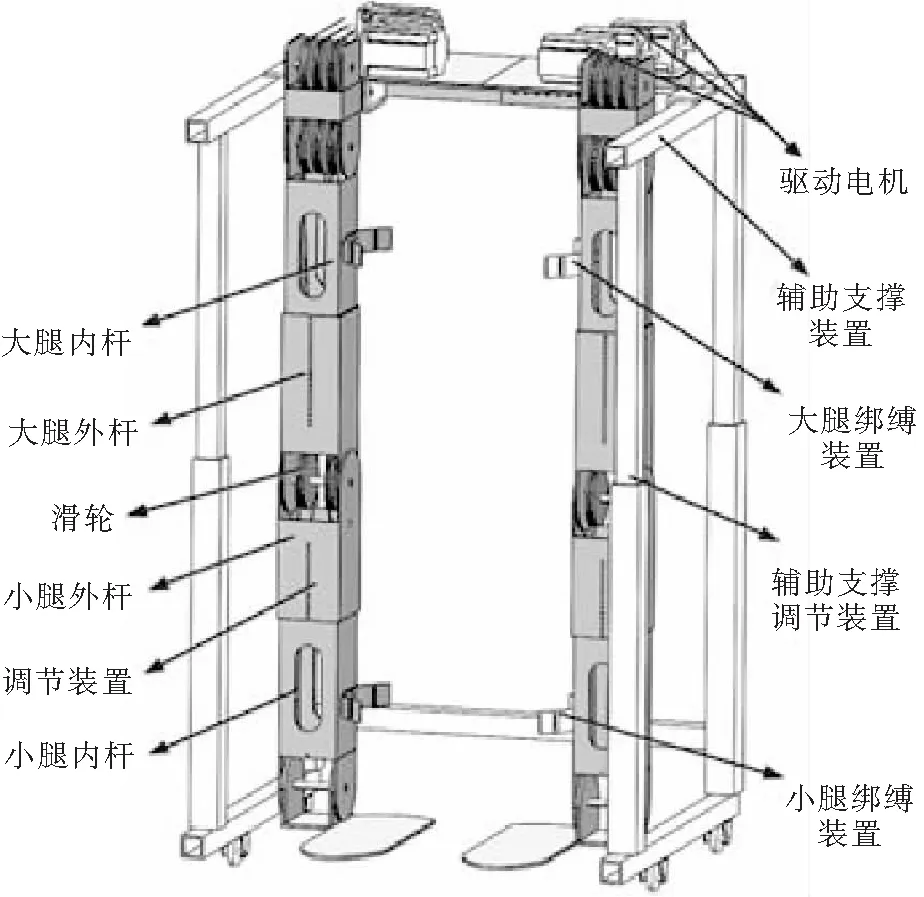
图2 下肢外骨骼整机
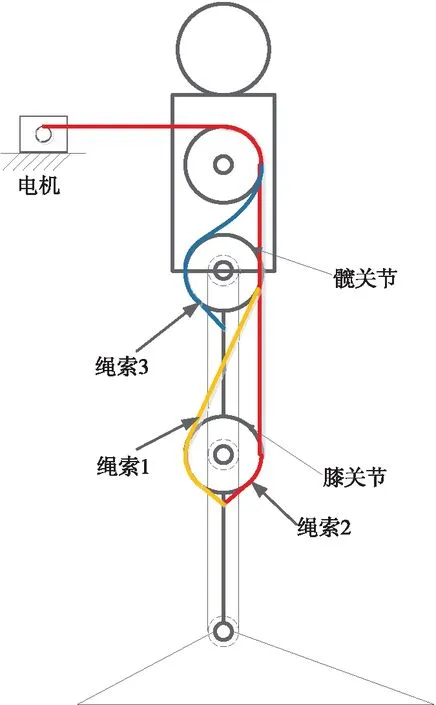
图3 绳驱动连接示意图
为了提高下肢外骨骼机器人尺寸的兼容性,需要其各部件结构尺寸具有可调性。通过查阅人体下肢尺寸参数表(GB10000-88),其调节范围(见图4),调节尺寸为385~530 mm,小腿调节尺寸为300~420 mm,臀宽调节尺寸为273~360 mm。
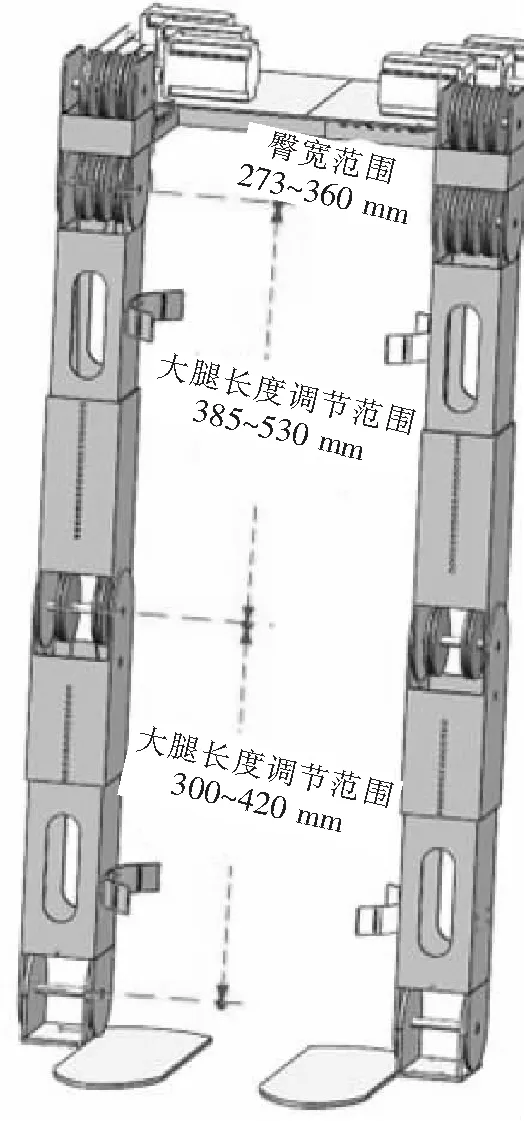
图4 下肢外骨骼调节范围示意图
2 下肢外骨骼机器人运动学理论分析
运动学主要是已知机器人连杆长度以及膝关节和髋关节的角度变化量后,求解末端在其坐标系下的位姿变化规律。本文设计的下肢外骨骼机器人属于关节式机器人,是一个复杂的连杆机构,其下肢结构左右对称,运动形式也基本相似,因此取其中一侧作为研究的对象,将腰部中点位置定义为基坐标。基于D-H法建立模型坐标系,各连杆坐标系如图5所示。根据三维模型得到的D-H参数表如表1所示[5]。
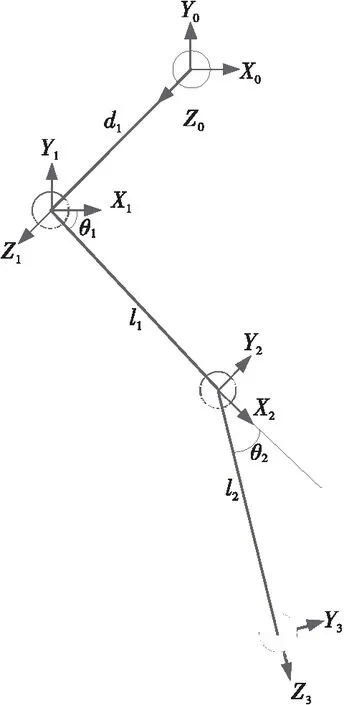
图5 下肢外骨骼模型D-H坐标系
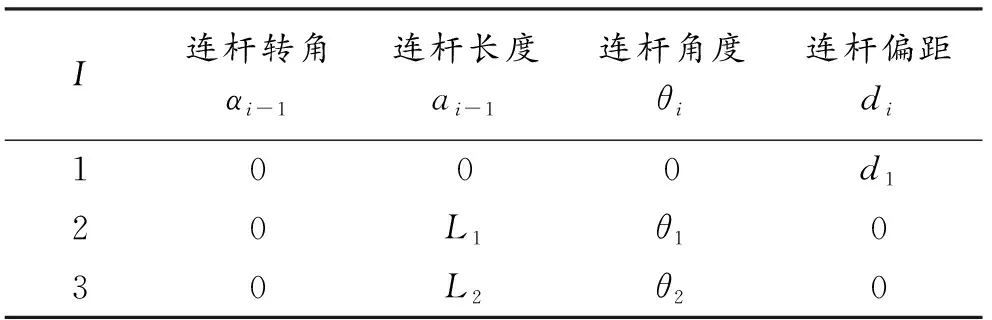
表1 下肢外骨骼模型D-H参数表
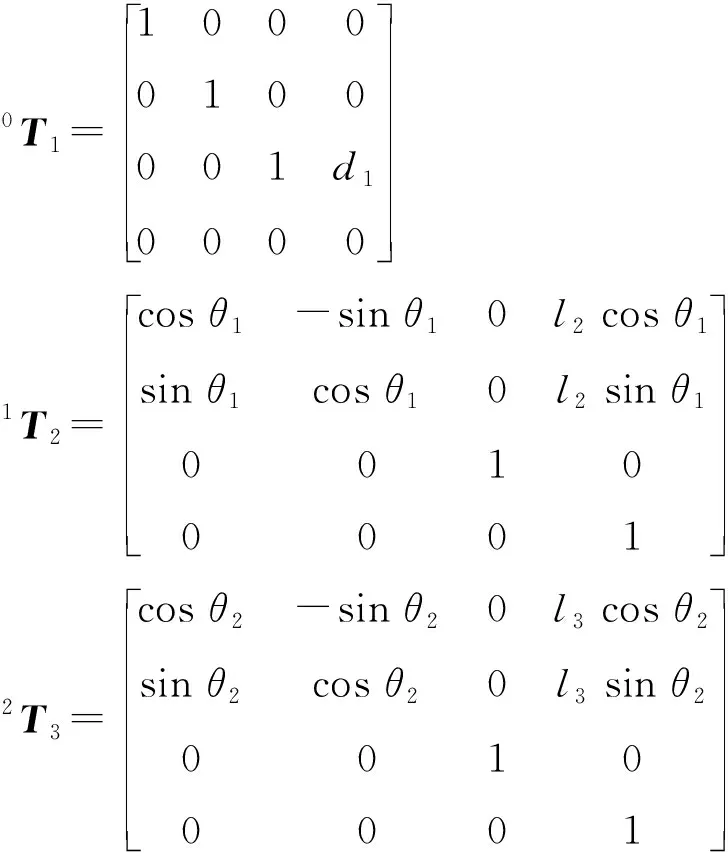
则下肢外骨骼机器人机械腿末端的位姿矩阵为:
式中:c12代表cos (θ1+θ2),s12代表sin(θ1+θ2)。下肢外骨骼机器人机械腿相对于腰部中点基坐标位移的表达式为:
3 机器人工作空间
通常来说,机器人的工作空间是指由末端执行器经历所有可能的运动后末端经过的全部体积,是衡量机器人工作能力的一个重要的运动学指标,受限于机器人的几何结构和各个关节的运动范围。
本文采用随机概率法——蒙特卡罗法,其采用随机抽样来求解数学问题的一种数值方法,计算流程图(见图6)。在对机械臂的可达工作空间进行计算时,首先利用蒙塔卡罗法在每节软体机械臂关节空间内选取不同的关节参数组合,然后将所选取的关节参数导入到运动学理论公式中,通过位姿变换矩阵T计算出软体机械臂末端参考点在空间坐标系中的空间位置矢量,最后将这些所求得的空间位置矢量在MATLAB中进行可视化处理,通过处理后所得到的三维图像即为该软体机械臂的可达工作空间。可达工作空间可视化图像的疏密程度反映了软体机械臂末端参考点运动到该空间位置的概率[6]。
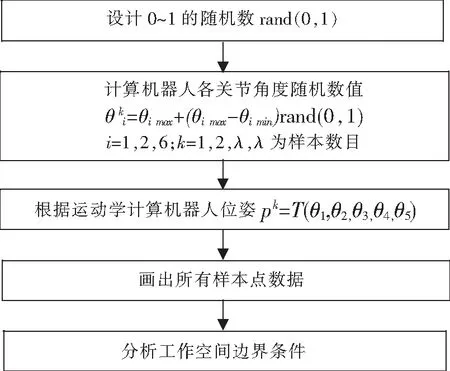
图6 机器人工作空间计算流程图
根据其位移表达式以及所设计的下肢外骨骼参数,利用蒙特卡洛方法对本文所设计的下肢外骨骼康复机器人进行运动学可达空间仿真时,随机采样点的数目设置为500 000个,通过MATLAB对其进行计算求解,由于本文所设计的下肢外骨骼康复机器人模仿下肢运动,在步态行走时仅在矢状面内作运动。因此本文仅给出工作空间三维视图、x-y平面视图如图7~8所示。
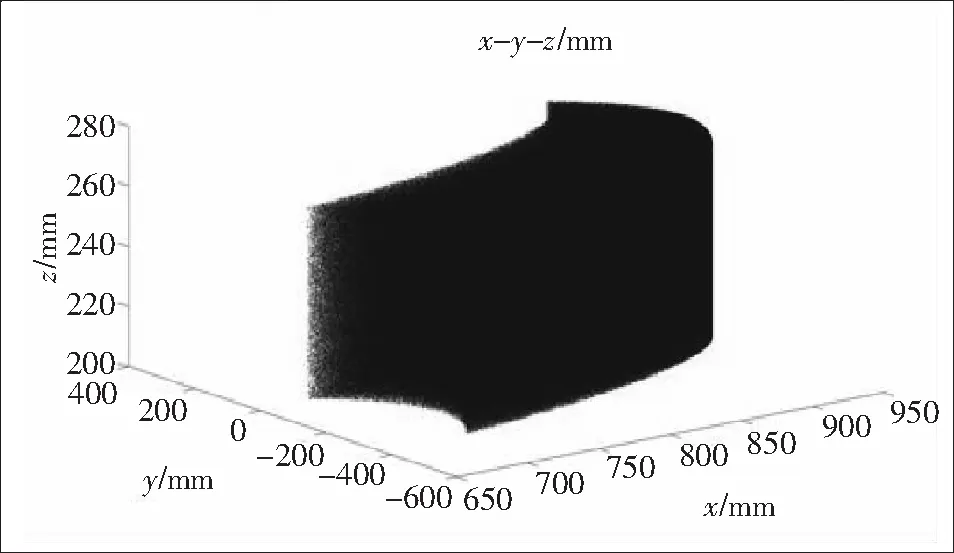
图7 工作空间三维视图
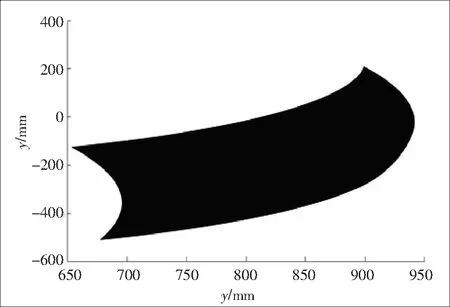
图8 工作空间x-y平面
4 运动学仿真
通过运动学可以分析所设计机构的干涉情况,主要是研究各个零件在运动的时候会不会相撞,这样在运行完以后,可以对其中不合适的零件尺寸进行修改,为下一步的设计打下基础。可以把运动状态生成视频,这样方便在设计机构完成以后,做成视频和客户进行交流,让客户更直观地看到设计的产品。
本文通过ADAMS对其进行运动学仿真,将其在Opensim中的步态仿真数值通过MATLAB傅里叶级数拟合,得到其角度与时间关系的函数,求导,得到角速度。此处应注意,ADAMS软件中默认使用弧度制,因此将数据处理,转换为弧度制,并且以(.txt)格式保存,将其导入ADAMS中,进行与实际物理样机状态相似的仿真[7]。
在ADAMS/Solver后处理模块得到其髋关节以及膝关节的角度曲线(见图9~10),从图中可以看出关节角度变化圆滑,没有尖角。
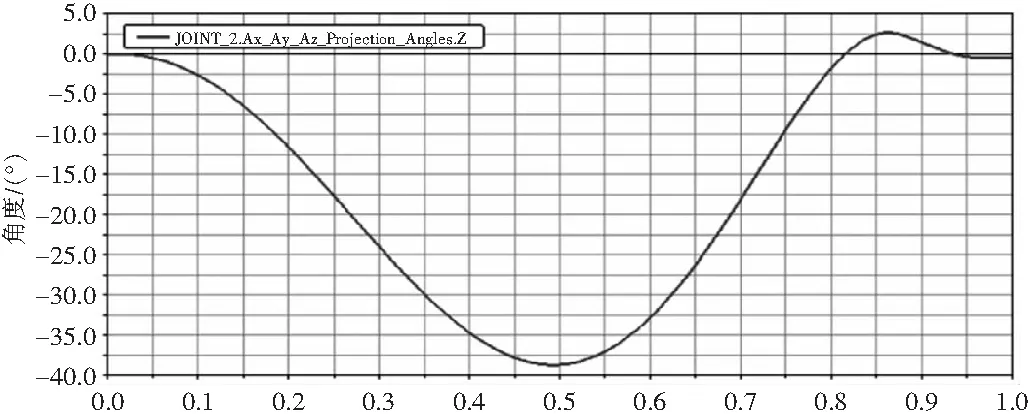
图9 髋关节角度曲线
图10 膝关节角度曲线
5 结语
对于刚性外骨骼,本文所设计的基于绳驱动的下肢外骨骼,能降低整个机器人的重量,减少穿戴者的能量消耗;并且配备有辅助支撑装置以及调节装置,适用于大多数人群。本文对其驱动原理作了描述,给出其结构矩阵,能为控制理论提供基础,并且对其进行运动学分析,提供了数学模型。通过运动学仿真,其角度变化平稳,无干涉现象,表明本文所设计的下肢外骨骼应用效果良好,设计具有可行性。
