一套用于海底油气分形迁移研究的实验装置
2022-10-21霍锦华张舒航秦智鹏谢佳玲李会芬门佳坤张世伟张霄朋黄为良
霍锦华,张舒航,秦智鹏,谢佳玲,李会芬,门佳坤,张世伟,张霄朋,黄为良
(广西大学 机械工程学院,广西 南宁 530000)
0 引言
随着防砂完井技术、复合射孔优化新技术、二次储层完井和完井保护新技术以及智能完井技术的发展[1],深海勘测已经成为人类找寻新化石能源资源的重要手段。从2012年-2018年,全球约50%的新发现的油田,约60%的新发现油气储量来自深海水域[2]。因此,进一步完善改进海洋油气勘测技术对于缓解能源短缺至关重要。目前我国急需探索海底资源,但缺乏对于海床亚层油气迁徙机理的了解,主要症结在于不了解海床中碳氢化合流体的迁徙机理。
由于海底亚层结构的复杂性,并且油、气、固多相流动的流动特性远比单相流动复杂,多相流相间存在着界面效应和相对速度,所以导致多相流动过程是一个复杂多变量的非线性动态过程,其机理性研究目前还不够充分。纵观国内外相关多相流多孔介质方面的研究,主要的研究方向还以管道气泡流和弹射流为主,无法模拟海底三维平面的复杂性。1979年,OLE HASSAGER研究了黏性牛顿液体中气体上升体积和形状的变化状态[3];1986年TABELING等[4]在前人基础上研究了在极小间隙下气体指进状态的变化,得出指状的界面不稳定与指进速率有关;2015年,Germán Varas等[5]通过对Hele-Shaw气体联通后气柱边缘呈抛物线的流化床状态,得出流化床的宽度随着速率增加而变大,并且有分散逐渐集中。2019年周彦霞等[6]针对致密油藏用实验的方法模拟了盐水的渗析过程;在现有研究中无法直观看出影响指进现象的因素。
为此,在文献[7-9]的研究基础上,设计制作一套能清楚模拟展现海底油气迁徙过程的实验装置。该装置依靠Hele-Shaw流动模型建立,可调配不同成分的悬浊液以模拟不同海床的沉积岩成分[10],通过注射泵注射气体,用气体的逸出过程模拟油气的迁徙过程,并可以改变气体流速以获得不同情况下的实验结果。实验可以直观展示油气在不同海域海床亚层结构中渗透及迁徙的过程。这对于我国海底油气资源勘测及开采具有重大意义,同时也对于评估不同海域油气开发的成本与风险有借鉴意义,以及对国家海底资源“碳封存”有参考意义。
1 实验装置设计
1.1 实验原理
本实验设计的目的是通过实验定量分析海底油气迁徙的动力学过程,了解和预测渗透位移和行走趋势,非固结介质中气泡的形成和上升的力学机制。即多相流中气体在固、液混合悬浮液中的流动过程。为达到要求,实验即实验装置需满足3种需求:
(1)模拟海底油气迁移的基本环境与条件。由于海床亚层表面是一块平直,且厚度有几百米之高的巨型板块,所以海床板块间气体渗透过程,完全可以简化成一种两无限大平板间的多相流过程。
(2)模拟呈现油气在迁徙过程中以孔隙延展分型的形式扩大的过程。油气在海底以油气藏的形式储存,随着油气藏的膨胀,顶部油气压力增大,最终突破土层的束缚在沉积岩中渗透,油气在迁徙过程中以孔隙延展分型的形式扩大,该实验需要模拟此延展分型的过程。
(3)模拟两相置换过程,即为气相在平流流动的液相中不断扩张、置换和演替推进的过程。
因为海床亚层的气体渗透过程极其缓慢和复杂,无法使用近似模拟的方式与真实海床对比,流体力学中可以根据雷诺数相等的原理将无法模拟的海床亚层按比例缩小,即构建缩小装置来模拟。关于海床油气迁徙的推演模拟实验,目前在油气迁徙过程模拟领域有两种主流模型,一是Hele-Shaw cell模型,二是3D cell模型。3D cell是一种三维的模型,通常以树脂玻璃圆柱体为容器,填充悬浊液后从底部进气,从而形成三维的孔隙结构,但缺点在于难以观测到其内部的孔隙分布情况。因此基于Hele-Shaw流动模型设计实验装置以及实验操作步骤。Hele-Shaw流动模型由英国机械工程师Henry Selby Hele-Shaw在1898年提出,是两个紧密间隔的平行板之间,某相流体在其他流体间的缓慢流动模型,是黏性流动stokes流的一种特例[11-13]。其原理为:假设两平板面积为无限大,且流体为流速极小的充分发展的定常层流、黏性不可压缩流体,则在该系统中,流速仅为垂直于板方向位置的函数,压力仅为平行平板方向位置的函数。研究多相流之间交融现象,由于流体间黏性不同,导致流体形成分叉多行的指状形状。此外,在Hele-Shaw模型中,进入两板间流体的速度满足抛物线分布,流体的流动有旋[14]。但是由于流体垂直于平板方向的涡量分量为零,所以从平板上方观察的时候流动是无旋的。粘度较低的相将比粘度较高的相移动或置换得更快,导致界面不稳定,从而导致出现手指状图案[15]。
实验拟通过两块透明板形成夹层,将海底土质与油气相互作用简化为多孔介质与空气的相互作用,将复杂三维现象简化成二维,从而使实验现象更容易被观察,而这种夹层以及流动的填充液,恰好能够构成Hele-Shaw流动状态的形成条件。实验所模拟的过程即为Hele-Shaw流动过程。在此基础上,加入对于悬浊填充液以及气体流动速率的控制方式,模拟不同环境和条件下的海床亚层气体迁徙过程。可以实现Hele-Shaw流动过程的仪器被统称为Hele-Shaw cell。
同时,实验装置还需能够满足注入填充液,保持气密性,注射气体。为此,本实验装置对主流的Hele-Shaw cell进行了改良,以实现对海底油气迁徙状况的适配性调整:将空气注入到二氧化硅悬浊液中,气相流体进入固液混合相,模拟二维平面流体在Hele-Shaw cell中的流动,观察指进现象,通过添加不同的悬浊液模拟不同海质,以此来体现海底油气过程的迁徙。
1.2 实验装置设计
完整的装置由Hele-Shaw Cell模块、电控模块、监测设备与图形处理系统组成。
Hele-Shaw Cell模块主要由两块平行的玻璃板组成(图1)。将两块玻璃板(长w=350 mm,宽a=200mm,高h=10 mm)通过玻璃胶粘接在一起。为了控制间隙,两个厚度受控的硬质塑料间隔件(厚度为1mm)被粘在两个玻璃板之间。两块玻璃板中心形成流体通道,两玻璃板一端封闭成V字形,另一端打开与大气压相通。同时在一层玻璃板的中心线上打通一个进气口。Hele-Shaw模型被一个铝框架包围,铝框架固定在玻璃板上,硅密封件确保模型的密封性。使用流量计连接压力缓冲器控制气体流量,高像素摄像机记录实验现象。
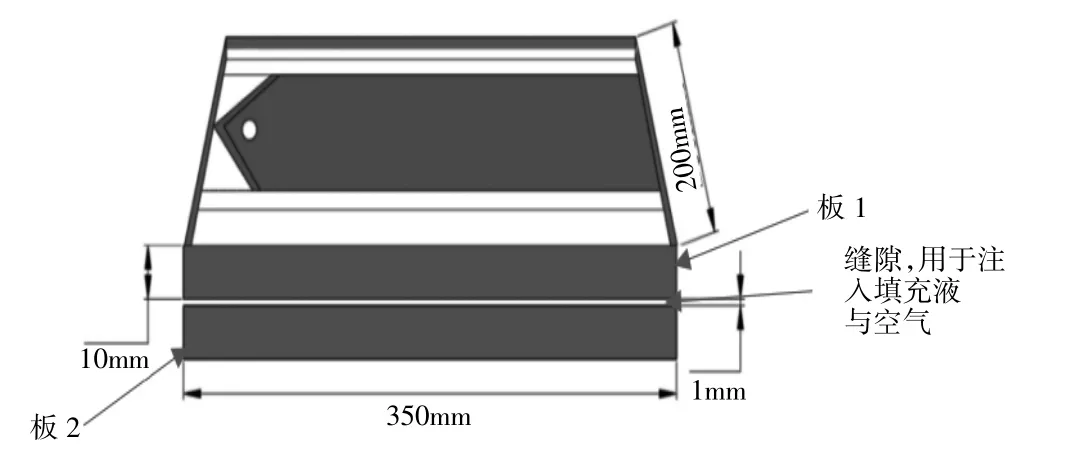
图1 Hele-Shaw Cell模块装配图
在实验时,将空气通入压力缓冲器中,用流量计连接压力缓冲器与模型的进气口,在流量计与压力缓冲器之间安装电控模块,该模块是一个可以控制的阀门,用以调节气体通断,再将由流量计与数据采集器组成的检测设备连接传至电脑。图像处理系统由相机及其组件和电脑组成,使用分辨率更高的相机,型号为MVXG2500GC-T,2500万像素的摄像机安装在距离机身30cm处的框架上,用以固定视野范围,用LED光源板提供平行光源。摄像机与触发信号发生器连接,再将触发信号发生器与流量计连接,通过改变气体流量的大小触发摄像机,将Hele-Shaw cell模块中二氧化硅颗粒通道的形成与变化记录下来(实验装置如图2所示)。
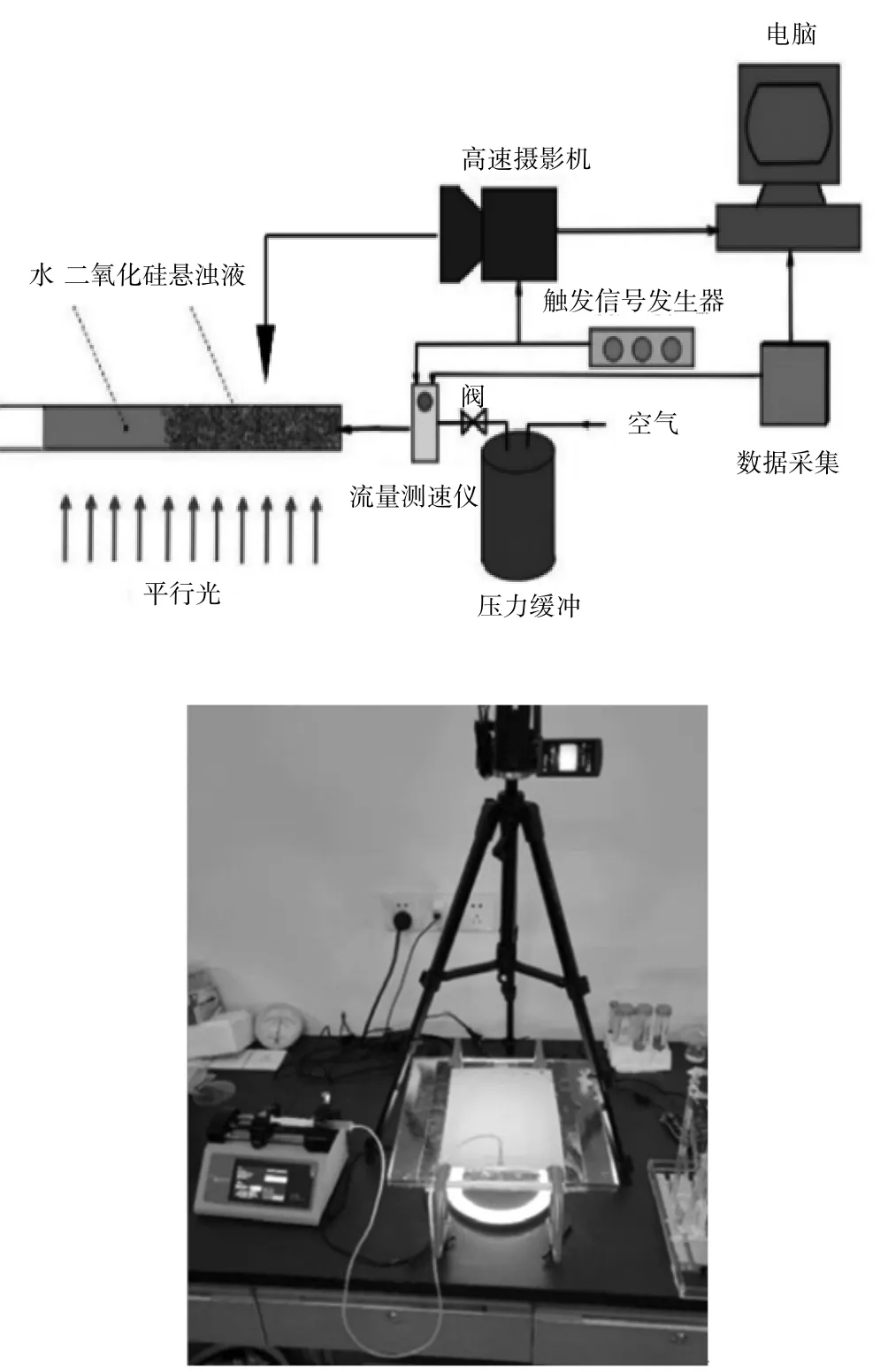
图2 实验装置
使用该实验装置模拟不同情况下的海底油气迁徙过程以及孔隙分布情况并直观表现,尝试复现海底油气孔隙的形态并定性分析部分海床结构特征。由于Hele-Shaw cell模型受到出油孔数目与孔距半径的影响,气体排出率随出油孔数目的增大而增大,随孔距半径的增大而降低[16],因此在此做出预测:流速越低,颗粒平均直径越大,实验指进现象越明显。
2 实验设计与结果
2.1 实验目的
本实验的目的是为了观察气体在多孔介质下的迁徙状态,以此来与数值模型进行对比。海床是一个多孔结构,油气迁徙的过程,本质上就是气与液在多孔介质中的移动过程。本项目组的实验利用二氧化硅与盐水溶液作为填充物模拟海床的多孔结构,注入空气模拟油气。通过空气的在多孔介质的迁徙过程,使油气与通道介质的动力关系以及油气在多孔介质中的迁徙路径可视化。
2.2 实验设计
由于大部分海域天然气水合物沉积物的覆盖层沉积物主要由粘土(<4 μm)和粉土(4~63 μm)和砂(>63 μm)组成,其中粘土、砂占到了70%以上[17],根据前人对于海洋土的研究可以得知海洋土的钠、镁离子较多并且普遍含有绿泥石、碳酸盐砂层[18],所以采用氯化钠溶液与平均直径分别为60 μm、100 μm二氧化硅颗粒。因为二氧化硅二氧化硅的的物理性质、抗拉强度、含水率与沙土相同,其颗粒相较于其他颗粒更稳定,更容易获得,也更经济,且二氧化硅颗粒与饱和氯化钠溶液混合时,对比与纯净水、酒精相混合,更容易在氯化钠溶液中沉降,更容易出现颗粒与溶液分层,形成多孔介质。因此选择大小可控的二氧化硅颗粒与质量分数为5%氯化钠溶液混合,来模拟海底岩土层与海水环境。
实验选取了两个控制变量,分别是二氧化硅的直径(60 μm、100 μm)与注射速率(10 ml/min、5 ml/min)。二氧化硅直径取值基于海底沉积颗粒的平均大小上下浮动,注射速率取值源于低雷诺数,即低流速、低密度、低特征长度和高粘度系数的边界条件,此外后续调整量级变化时只需调整倍数,取值为5、10,以便能够在制流量和图形差异的图像中获得方形的直观图像。驱动气体迁徙的动力学过程的主要因素是注射流速,理论上存在一个阈值流速,使得在流速阈值范围内气体迁徙的指状形状和数量存在差异。为了方便后期计算,流速分别取0.5 ml/min、1 ml/min、5 ml/min、10 ml/min。
2.3 实验步骤
(1)调配悬浮液。悬浮液主要成分是颗粒材料为平均直径分别为60 μm、100 μm的二氧化硅颗粒与质量分数为3.5%NaCl溶液的混合体(二氧化硅与氯化钠溶液的质量比为2∶1),根据实验需要调配体积分数为48%的悬浮液。
(2)充分搅拌混合液,将颗粒与氯化钠混合物在磁力搅拌仪上搅拌3~5min至充分混合(悬浊液为均匀的乳白色状)。
(3)添加悬浮液。从进气口通过注射器引入调配好的悬浮液,直到通道充满颗粒悬浮液。
(4)注射气体。注射泵连接注射器并从进气口注入气体。注射泵可以调节注射的压力大小和气体流量。
(5)通过设定程序定时记录实验照片,使用电脑将照片比对观察不同实验现象,得出实验结论。
2.4 实验现象
第一组实验选用平均直径为60 μm的二氧化硅颗粒,调节注射泵注射速度为10 ml/min,实验装置在1 min20 s前无明显变化,在1 min20 s时,注射口出现细小裂纹并不断扩张,但扩张范围十分有限,出现高度约4 cm的树枝分支(图3),该分支在短时间后与底部断裂变成气泡快速浮动上升。

图3 第一组实验结果
第二组实验选用平均直径为100 μm的二氧化硅颗粒,调节注射泵注射速度为10 ml/min,实验装置在2 min20 s前无明显变化,2 min20 s时,气体开始打通注射口处多孔介质,出现指进现象,并发展为类似树枝结构的迁徙通道,随后该树枝状通道现象不断成长至稳定(图4),分支多且细小。该结构生长至距离玻璃板顶部约五分之一处停止生长。

图4 第二组实验结果
第三组实验选用平均直径为60 μm的二氧化硅颗粒,调节注射泵注射速度为5 ml/min,实验装置在2 min20 s前无明显变化,在2 min20 s时,注射口出现细小裂纹并不断扩张,扩张范围相比2.2 ml/min情况下更明显,但经过短时间扩张后,扩张达到极限,分支停止衍生,经过5 s后分支与装置顶部空气联通。该组产生的树枝分支面积较少,分支直径较大(图5)。
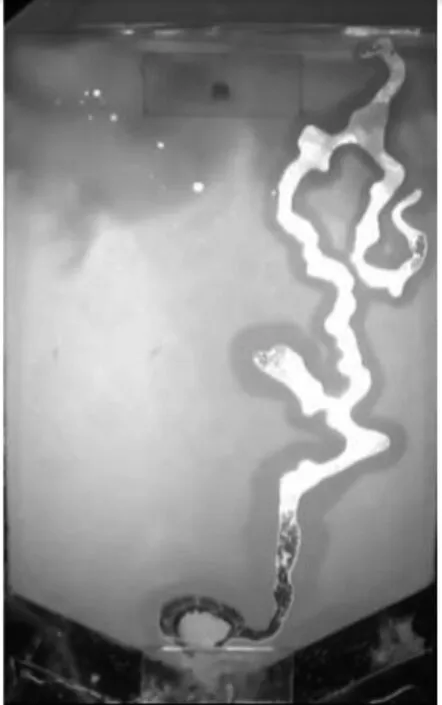
图5 第三组实验结果
第四组实验选用平均直径为100 μm的二氧化硅颗粒,调节注射泵注射速度为5 ml/min,实验装置在2 min20 s前无明显变化,2 min20 s时,气体开始打通注射口处多孔介质,出现指进现象,并发展为类似的树枝结构通道,随后该树枝状通道现象不断成长,形成两个大小几乎一样的树枝结构,分支多且细小。左侧结构生长至距离玻璃板顶部约二分之一处停止生长,而右侧结构成长至联通装置顶部(图6),整个联通过程约18 s。
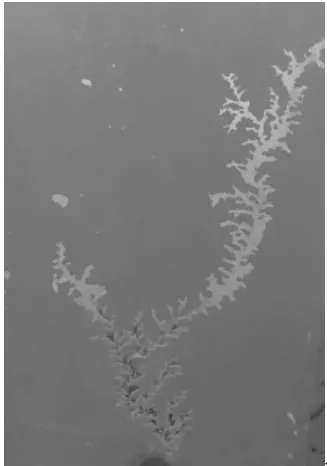
图6 第四组实验结果
2.5 实验结果与分析
注射空气,观察空气在填充物中的演变过程。注入的空气以一种缓慢的、准连续的指进现象变化,在这个过程中,指进通道侧向分支和随机生长方向产生了一个树形结构(图7)。由前进界面汇编而成的压实颗粒前缘沿整个前缘可见为一条狭窄的暗带。由于树枝结构内部的空气压力与界面上的摩擦力之间的力平衡,会出现一个特征树枝宽度。
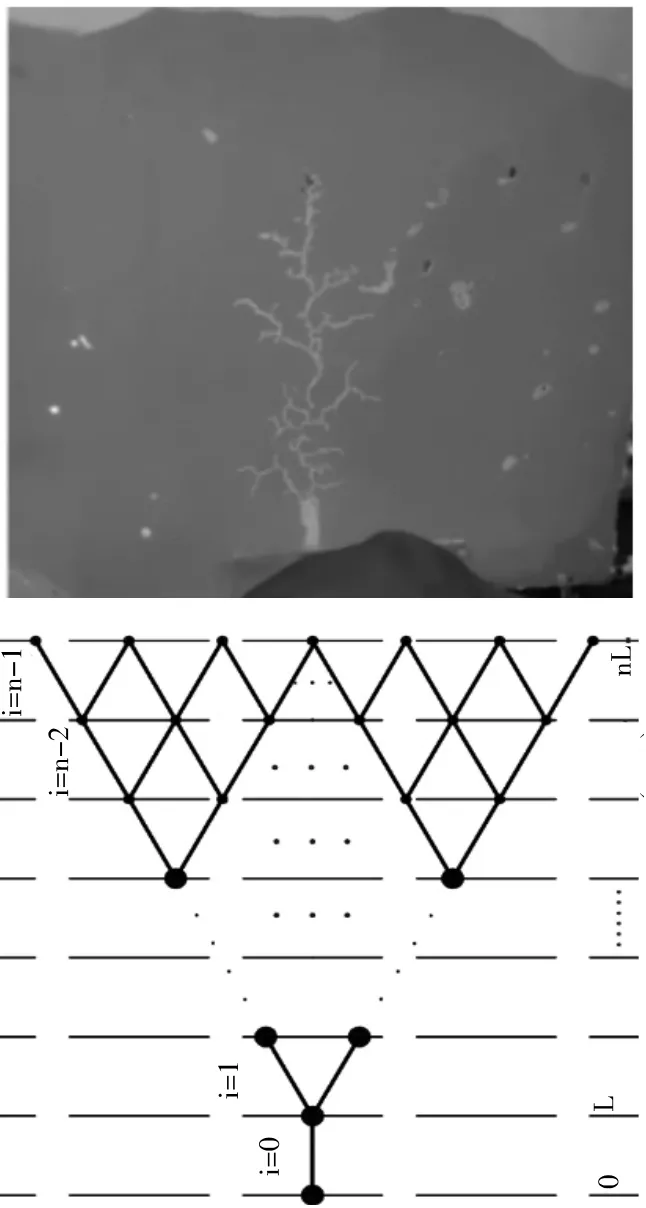
图7 树状分形形态
在不同条件下进行了多次对比实验,使用不同的填充液去模拟不同的海床亚层结构,得到的油气迁徙路径都具有相似的树状结构。以不同的注射速率进行实验,得到的树状通道虽然在宽度上有差异,但在形状上都为树状。同时,不同实验条件下树状结构整体与局部上具有相似性。再者,为了避免由于操作人员的主观性与事件偶然性对实验结果的影响,独立进行了大量实验,得到的结果都为相同。由此可以看出,油气迁徙的树状结构迁徙通道不受空间和时间的约束,符合分形理论[19]中的标度不变性原则,证实了该实验模型的准确性和可行性。
实验发现,树枝结构不断演化的过程中随着前端空气被恒定的、缓慢的活塞驱动所压缩,空气压力线性增加。随着压力的增加,前缘最薄弱的地方最终屈服,压缩空气在径向扩张之前通过狭窄的颈部迅速侵入。前端空气减压后,膨胀会减慢并停止。堆积在界面上的颗粒状物质沉淀下来,并逐渐压缩成一个堵塞的前端,在这里,最薄弱的地方再次决定了下一个气泡的位置。在不断前进、代替、压缩、破裂过程中,空气在填充物中不断树状型前进(如图8所示)。这主要是因为压力差为迁徙驱动力,压力下降最快的方向为迁徙的优先方向,竖向迁徙趋势大于横向迁徙趋势[20]。
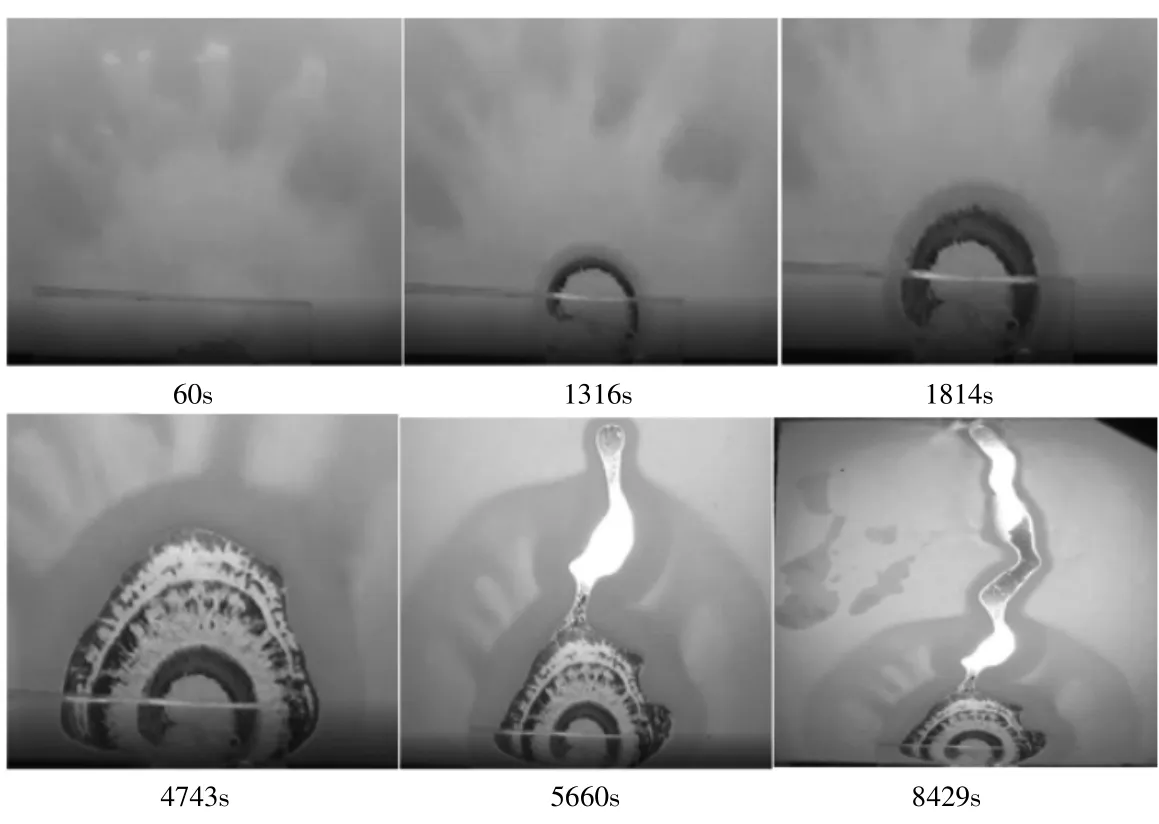
图8 随时间演化的粘性指状结构
在真实的油气迁徙过程中往往以低速率进行,低速率意味着静态过程,树枝周围环境的影响可以忽略不计,从而有效地将树枝与周围环境隔开。因此,特征指标与通道宽度无关,仅受到表面张力和材料屈服应力的影响。屈服应力和摩擦流体都分别受与屈服应力和静摩擦相关的阈限动力学控[21]。
2.5.1 注射速度对指进现象的影响
在相同二氧化硅平均直径的条件下,注射速度越慢,出现指进现象所需要的注射量越少,在注射速度过快的情况下,甚至无法出现明显指进现象,仅仅是在注射口出现短暂细小的指进现象,之后便成为一个个独立的气泡扩散。将空气注射速度增加到一个阈值以后,动态会发生显著变化,出现不同的形态(图9)。界面的发展不再缓慢和连续,相反,它的运动变得高度间歇性,前端在很长一段时间内保持静止,随后,粒状流体混合物突然被气泡形状的空气爆发所取代,位移继续逐泡前进。
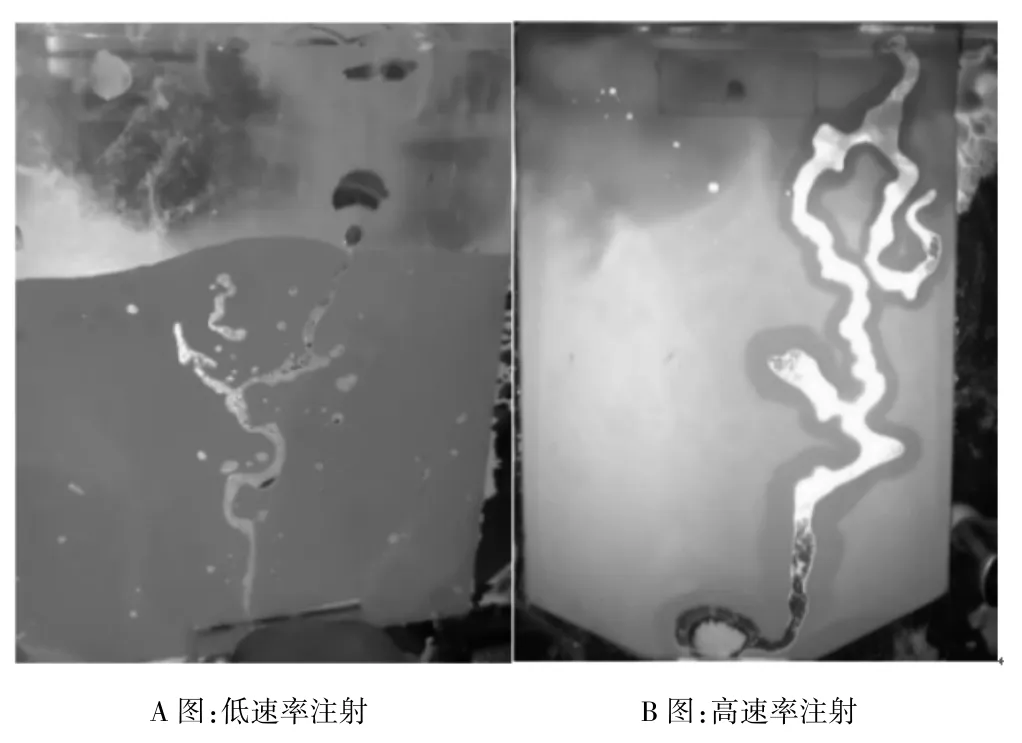
图9 蠕虫形态
通过分析得知注射速度越大,气体内部的压力越大。压力增大,使气体打破内部压力平衡,达到多孔介质的屈服压力,克服二氧化硅颗粒的摩擦力,克服毛细管力与边缘粘滞力所需要的时间更短从而使树状结构发生改变。
2.5.2 二氧化硅直径对指进现象的影响
通过对比多组实验现象,最终发现平均直径为100 μm的二氧化硅比平均直径为60 μm的二氧化硅更容易产生更大的树枝结构。通过电镜观测多孔介质结构并分析多孔介质显微成像图(图10),得知增大二氧化硅颗粒大小,会导致多孔介质中的空隙增大,较大的空隙更有利于空气突破颗粒间的摩擦力,有更多的路径能够被轻易打破平衡,从而形成更多的树枝状分支。并且由于产生的树枝分支数量多、面积大,气体内部压力的增大不容易打破分支内部压力与外部张力、毛细管力之间的平衡,有利于分支结构成长发展壮大,且不会使得通道突然断裂形成气泡。
该实验对我国南海北部神狐海域天然气储藏海床结构进行了模拟并与该海域实际勘测的地震资料图[22]进行了对比。对比结果如图11所示。
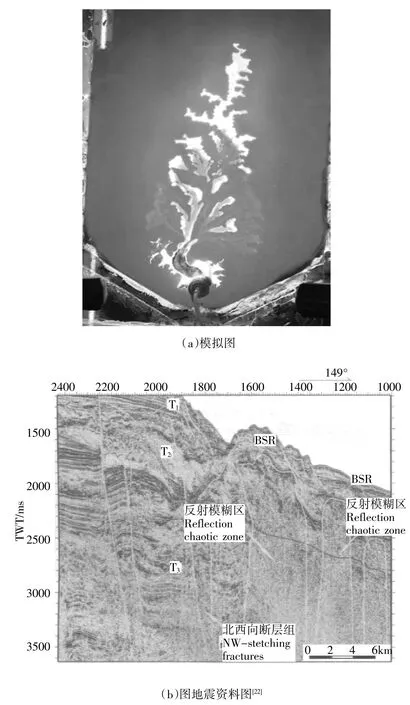
图11 神狐海域结构
从地震资料图可以看出地震剖面上呈直立的、上小下大的烟囱状通道,局部横向扩张呈囊状、树枝状,底部结构刺穿各沉积层最后联通表面释放油气。通过实验模拟得到了与之相符合的结构,实验所得的树枝状结构,从底部开始发育经历纵向、横向发展的过程,最后与上部联通形成上小下大的油气迁徙通道。综合对比,该模型成功模拟了此海域的油气迁徙过程以及该海域的海床亚层结构。
3 结语
本实验装置根据气体和流体在两平板间的流动特性,在Hele-Shaw模型和分形理论的基础上设计制作,能模拟不同情况下的海底油气迁徙过程以及孔隙分布情况并直观表现。实验表明:(1)该装置能成功复现海底油气迁徙孔隙的形态,如:树状形态、蠕虫形态、粘性指形态等。(2)通过改变控制参数,该装置能模拟不同海域不同海底亚层结构状态下油气迁徙的路径及发展,实验结论对于我国海底油气资源勘测及开采具有参考意义。(3)该实验能为后续对于油气迁徙过程的分析研究提供理论研究依据和实验设计思路,具有一定的实用意义和推广价值。