关于果蔬采摘机器人机械系统设计与关键技术的研究*
2022-10-20王甦
王 甦
(河池市职业教育中心,广西 河池 547000)
随着社会的快速发展,人工采摘作为农业生产中需要人力最多的一环,成本越来越高,许多国家为了促进采摘业的发展,均在努力研发采摘机器人。通过机器代替人工,既节约成本又提高效率[1]。果蔬采摘机器人是一种采摘设备,其主要的功能是对果蔬进行精准采摘,其工作原理是通过PLC控制系统,在系统中编写特定的驱动程序;同时,机械手采摘机构应在液压机的作用下工作,位置检测装置的实时监控应返回控制系统,以便相应地调整机构的位置,保证位置的准确性,使得采摘机构能够按照设定完成动作,满足果蔬采摘的工作要求。
1 果蔬采摘机器人结构及控制系统的设计
1.1 设计技术要求
主要用途:对果蔬进行采摘及搬运[2];主要参数:三自由度;手臂可以旋转180°,速度小于或等于70 mm/s;定位方式:根据地形设置起止位置;定位精度:±0.3 mm;驱动方式:液压驱动与电机驱动结合;控制方式:PLC;手指握力:500 N;夹持范围:8 dm3,10 kg,车体部分为直流电机驱动,荷载100 kg。
1.2 果蔬采摘机器人机械手的运动分析
根据果蔬采摘机器人的设计要求,其主要是在PLC的控制下,在编写程序后,行驶到指定位置,采摘果蔬并运到指定位置。其主要动作顺序为:液压缸处于收缩状态,手臂处于后限位,小车行驶,识别到成熟果蔬,行驶到指定位置,机械手开始作业:手爪张开—手臂前伸下降—手臂中止—检测位置—手臂下降—手爪闭合—手臂上升—手臂旋转180°—手臂下降—手臂下降到指定位置—手爪张开—手臂上升—手臂回转180°至原始位置[3-4]。
2 手部设计及计算校核
2.1 机械手部设计要求
1)具有一定的夹紧力与驱动力,并且保证具有足够的夹紧力以便夹断瓜藤。
2)夹具应有一定的夹紧间隔和开闭角度,从而抓取果蔬。
3)手爪应具有一定的定位方式,从而实现对果蔬的精准抓取。
2.2 手部设计方案
根据设计参数及其工作用途,其要实现果蔬的抓取及瓜藤的切断,并将果蔬放入小车当中,所以果蔬采摘机器人是用来抓取果蔬及切割瓜藤的夹持装置。综上考虑,将抓取部件设计为铲斗形式,通过螺纹杆的转动,使得移动平台移动,进而实现机械手的收缩,完成采摘动作。手爪结构如图1所示。
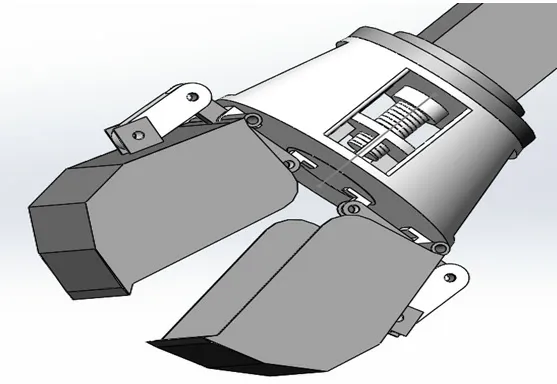
图1 手爪结构示意图
分析表明,在电机动力不变的情况下,随着角度的增大,握力增大,因此牵引杆的拉伸增大,手部的设计尺寸应增大,所以α=30°~45°最好。
3 手臂设计及计算校核
3.1 机械手手臂的设计要求
1)臂部因需要承载果蔬及爪部重量,应保证其刚度及强度、承载能力并且控制重量[5]。
2)手臂运动速度要平稳,尽量降低惯性冲击。
3)减少手臂部件的摩擦,手臂结构尽量简单紧凑。
3.2 手臂设计方案
本设计的机械手臂,在液压缸的收缩下能够实现弯曲运动,而回转动作则是由机身上的回转台在电机的带动下实现的。采取双液压缸的形式对手臂进行推拉从而实现手爪位置的精准控制[5-6]。在最末端装入电机连接螺纹杆,通过电机的正反转来实现手部的收缩与张开,进而实现对果蔬的摘取与放下。其结构如图2所示。

图2 机械臂结构
4 车身设计及计算校核
4.1 车身的设计要求
1)需安装一个果蔬机械臂回转机构并保证其精度及刚度。
2)为采摘机构提供一个稳定的工作平台。
3)能够稳定转向。
4.2 机身的设计方案
本文选用直流电机作为整个装置的动力源,因此直流电机性能直接决定整个装置的运行情况。选用电机不仅要考虑价格合理,降低整个装置成本,也要能够提高足够的动力,保证整个装置稳定运行,还不能选用动力远大于所需的电机,这样会造成性能过剩,而且价格昂贵,不符合设计理念。因此选择电机时,不能考虑单一指标,不仅要考虑多种因素,也要考虑工作环境。计算直流电机功率:

考虑本装置的整体结构,本装置需要承受的质量为100 kg,需要载荷为1 000 N,其运行速度V=0.5 m/s,因此:

该机构的传动效率是0.85,则:

本装置连接轴转动,轴的直径为20 mm,则转速为:

根据上述计算和论述,考虑到工作环境和实际需求,考虑设计余量,本装置选取功率为1.5 kW电机,其转速为2 980 r/min,型号为Y80M1-2[7-9]。如图3所示。

图3 电机结构示意图
5 机械手液压系统
5.1 机械手液压系统原理图设计
根据果蔬采摘机器人的设计要求,本机械手具有三个自由度,具有液压驱动和PLC控制,能够实现对果蔬的精确采摘功能[10]。
5.2 液压元件明细表及模型展示
液压元件明细、液压缸模型分别如表1、图4所示。

图4 液压缸模型图
6 总结
课题组通过对国内外果蔬采摘机器人的了解,对相关技术领域的学习,发现自己的设
计还有很多不足。具体的不足如下:1)结构设计还不够成熟,由于果蔬的果实与叶片颜色近似,导致果蔬采摘机器人的成功采摘率不高;结构设计还不够紧凑,机器人价格过高,要想投入生产还需进一步优化;2)PLC设计程序设计可能过于理想,还有许多情况没有考虑到,程序设计也需要进一步完善;3)在设计过程中,为了追求各个部件的动力充足,在一些方面忽略了环保理念。希望随着科技的发展,可以制造出识别精确、采摘平稳、动力环保、价格低廉的果蔬采摘机器人,早日帮助果蔬种植户们解决人工采摘成本高、效率低这一难题。

表1 液压元件明细表
