智能煤矿矿用水泵状态检测的研究
2022-10-20谢正卿邱磊杨丽晴袁志浩崔钰豪
谢正卿,邱磊,杨丽晴,袁志浩,崔钰豪
(中国矿业大学(北京),北京 100083)
0 引 言
智慧矿山是以透彻感知矿井状况、深度互联以及智能应用矿井设备为主要特征的信息化、智能化矿山建设工程。矿山设备的监测与故障预测是达成智能采矿必不可少的一部分,因此生产环境中设备的状态监测技术受到工业界的重点关注。
煤矿井下生产过程中,由于自然或人为因素,导致地下径流或地下含水层的水与井巷贯通,造成矿井涌水。通常使用排水泵将涌水抽排至其他区域或经井下泵房抽排至地表,确保井巷中正常的生产秩序和人员设备安全。煤矿作业环境恶劣,地质结构复杂,水泵作为井下作业的重要一环,一旦出现故障就会带来巨大的经济损失和严重的社会影响。如果依靠施工人员对水泵实现全天候的监测,需要大量的人力物力,随着“煤炭工业2025”的提出,以及“机械化换人、自动化减人”的推广,对矿井下水泵的状态实现智能检测具有重要价值。
基于对矿山内水泵真实状况的考虑,由于MD580-70×9型水泵承担着矿井的排水任务,运转频繁,磨损和锈蚀速度很快,需要定期对其进行生井检修。故本课题组选定这一型号的水泵作为主要研究对象实现对水泵状态的检测,包括发生故障与否判断,故障诊断,以及故障预测等功能。
1 理论依据与方案设计
1.1 理论依据
1.1.1 判断依据
查阅不同规格和型号的水泵说明书,在众多水泵状态参数中,选择出少数特征参数,导致水泵故障的因素有很多,由线性动力学理论得知设备结构的变化(比如结构损伤)会引起结构动力学参数(如固有频率)发生变化。几乎大部分水泵内部零件如转子、滚动轴承、联轴器等部件的损坏都会引起振动的异常,也就是几乎75%水泵的损坏都将体现在振动上。根据调研,大部分评估模型都以振动烈度作为考察状态的参数,故我们以此作为评估方法中的特征参数。
MD580-70×9 为第二类水泵,其振动烈度其中正常工作的振动程度应小于等于2.8 mm/s。振动幅值小于1.12 mm/s 为优良状态,大于1.12 mm/s 小于2.80 mm/s 为合格状态,大于2.80 mm/s 小于11.20 mm/s 为不合格状态,大于11.20 mm/s 将不允许运作。在编程时若信号幅值大于2.8 mm/s 将被记录,记录下来的值将作为参考为我们时域判断提供基础。
1.1.2 判别依据
频域可以监测到的典型故障有两种:转子故障以及电机故障。有关频域判决水泵异常的标准如表1所示。
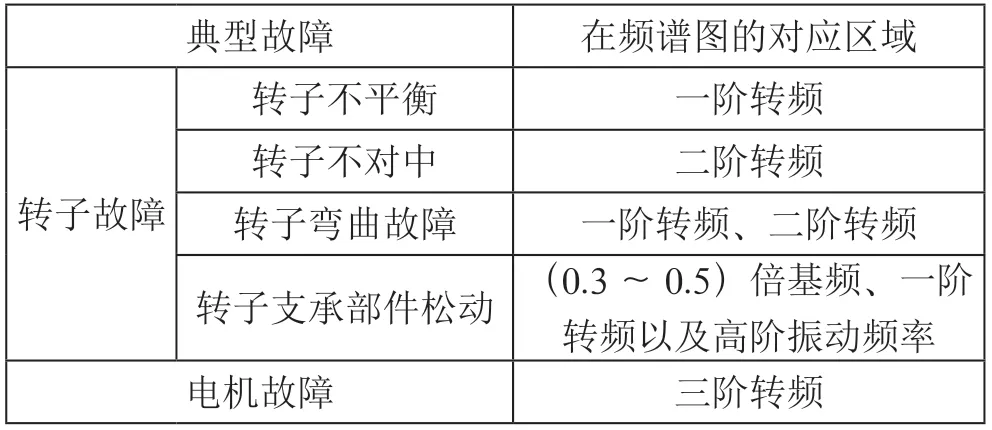
表1 典型水泵故障的频域表现[1]
水泵时域判别出现故障后,进行时频转换,记录幅值超过2.8 mm/s 的倍频点,结合表1即可进行判断。
1.1.3 预测原理
长短期记忆神经网络(LSTM)具有记忆前向时间节点并适时弱化前向节点对后向节点影响的能力,其模型最顶层定义了一条传送带,用来描述细胞状态并记忆当前网络的信息情况。传送带通过3个控制门对信息进行选择记忆,分别是输入门(Input Gate)、输出门(Output Gate)和遗忘门(Forget Gate)。门的开关状态受到输入层信息和前一时刻隐层信息的影响。本课题实验将模型看成黑箱,通过输入信号进入训练好的模型得到输出信号,结合国标判断,给出在未来多久之内会发生故障。
1.2 总体设计
1.2.1 故障判断
对所获得的水泵信号与国标进行比较,若1/3 的总采样时长内的信号均大于国标值则判定水泵出现故障。
1.2.2 故障判别
通过傅里叶变换将已有振动烈度数据从时域转化至频域,利用调研选出水泵的转速计算出基频,并通过高斯低通滤波器过滤其中的噪音,通过FFT 变换的出对应频点上的幅值,再基于国家水泵故障评判标准以及已有的故障类型的判别水泵发生何种故障。
1.2.3 水泵状态预测
将采集到的水泵数据的90%作为训练集并利用其均值和方差将其标准化后交替一个时间步作为未来LSTM 模型的输入,构建一个拥有200 个隐藏单元的神经网络,设置求解器为“adam”且学习率为0.05,通过LSTM 模型训练网络训练后得到预测值,再将剩余的10%作为测试集作为标准值与预测值求解均方根(RMES),其值越小则模型越精确。
2 软件编程实现
2.1 编程工具语言选取
通过对比多种编程软件,结合该项目所要实现的功能,最终我们选择MATLAB 作为编程工具,其自带编程语言且与C 语言类似。MATLAB 是一套高性能的数值计算和可视化软件,集数值计算、信号处理和图形分析等功能于一体,对振动测试方面也集成了丰富的信号处理和分析功能专用函数库,在信号处理方向有着广泛应用。
2.2 功能编程实现
2.2.1 仿真数据产生设计
由于缺乏真实的水泵信号,故采用仿真实验的形式对真实信号进行函数逼近,因为任意周期信号总可以分解为不同的正弦波,故而可通过公式=2π可以将水泵转速(1 480 r/min)转化为水泵基频,进而设计出该仿真信号为:
()=3sin(0.8×24.6π)+3sin(2×24.6π)+0.6sin(2×42.9π)+0.5sin(2×73.8π)+0.6sin(2×98.4π)+sin(2×123π)+4.6sin(2×147.6π)+4.7sin(2×172.2π)+sin(60×π)×sin(π/5)
为了贴近真实水泵工作环境,利用MATLAB 自带语句awgn()向仿真信号中添加信噪比为10 dB 的高斯白噪声。
2.2.2 流程图设计
如图软件设计部分主程序流程图,主要实现以下功能:
(1)运用MATLAB 判断振动烈度关于时间的曲线,在国标的标准下发生故障时间占给定时间的比例。
(2)若占比小于1/3 则显示无故障,继续进行振动烈度值的获取,若占比大于1/3,则运用MATLAB 将数据从时域转换到频域。
(3)频域上判断仿真信号的故障类型。对高斯滤波后信号进行快速傅里叶变换,处理并提取变换后对应倍频处的幅度特性,根据输入的转速计算出基频与倍频,根据国标判断哪些频率的数据出现异常,若幅值大于2.8 mm/s 则为异常。
(4)根据输入的转速计算出基频与倍频,根据国标判断哪些频率的数据出现异常。
(5)根据出现异常数据的倍频的组合,判断并显示水泵故障的类型,程序结束。
(6)利用水泵信号训练LSTM 神经网络,将90%数据作为训练组,10%作为验证组,结合均方根值判断网络好坏。
(7)根据训练好的网络得到的预测值即可以其作为依据判断未来的水泵状态。
具体实现框图如图1所示。

图1 程序实现框图
3 仿真验证
3.1 实验描述与验证目标
3.1.1 仿真信号类型
实验仿真信号模拟的是发生转子支撑部件联接松动故障的信号,采样频率为10 000 Hz,采样点数为4 096 个。所得波形图如图2所示。
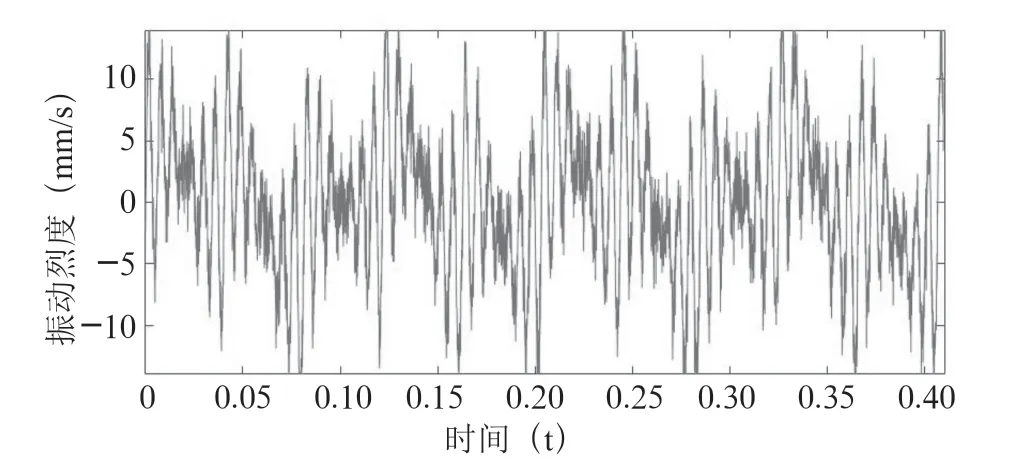
图2 仿真信号时域波形
3.1.2 验证目标
验证目标内容为:(1)通过对已有的发生转子支撑部件联接松动故障信号的时域判断,得出已出现故障结论并转至频域分析。
(2)频域上希望通过FFT 变换得到频谱图,在对应频率上分析幅值是否超出2.8 mm/s,判断是否与仿真信号的故障类型相符。
(3)对此信号用LSTM 进行预测,得到效果良好的预测网络。
3.1.3 验证方案
验证方案内容为:
(1)故障判断。在时域上对每一点幅值进行判断,若大于2.80 mm/s 则令index 加一,同时对记录点数count,若index/count 大于1/3,则认为水泵出现故障。
(2)故障判别。通过快速傅里叶变换将时域转化至频域,对超出国标的对应倍频进行记录,结合表1看是否为仿真信号对应的错误。
(3)信号预测。数据分为训练集和验证集后,网络训练出的预测值,判断验证集与预测值之间误差的均方根值,若足够小则可以视为模型良好。
3.2 实验结果
3.2.1 时域滤波判断
由于发生故障时长已超过总时长的1/3,故而判定水泵出现故障。时域滤波判断如图3所示。
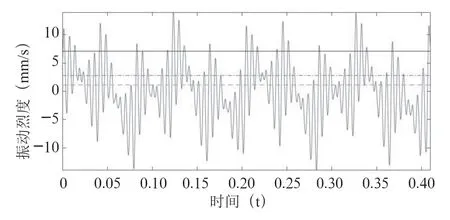
图3 滤波与故障判断
3.2.2 时—频转换
通过读取FFT 后的茎叶图(如图4),可看出频率为:9.16 Hz、24.41 Hz、146.5 Hz 以及173.3 Hz 处振幅超出国家标准范围,由水泵转速计算得到基频为24.6 Hz 可知此水泵在0.4 倍频、基频以及高倍频处幅值较大,初步判断故障是由转子支撑部件联接松动导致的。
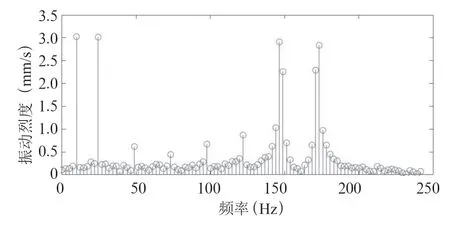
图4 倍频处对应图形
3.2.3 水泵预测
通过训练神经网络并进行预测得到水泵,计算均方根值判断网络效果,得到的LSTM 对未来波形预测效果如图5所示。
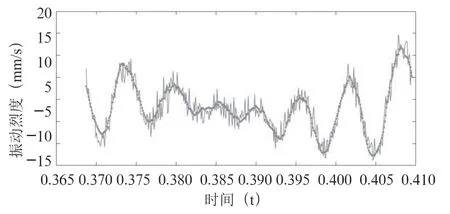
图5 LSTM 对未来波形预测
图5观测值为验证集,而橙线为预测值,通过对这两值进行比对,评判标准为RMSE 可看出此时拟合效果不错,对未来趋势的预测较为贴切。
4 结 论
水泵作为煤矿生产中不可或缺的重要设备,能够确保煤矿生产时不会受到地下水的影响。本课题通过对模拟信号的分析,实现对时域信号的进行故障判断,在故障发生时对其类型进行判断以求减轻专业人员负担,同时对时域信号进行监测预警,达到加强矿井下的智能化管理、提高生产效率以及防患于未然的目的。
本课题模拟地达成了通过对时域信号的抽样检测判断水泵是否出现异常,随后在出现异常的情况下将时域转换到频域,并对频域信号进行分析判断水泵出现何种故障,同时对水泵信号进行预测并得出未来水泵是否可能会发生故障这三方面的设计目标,希望能通过此课题对智慧矿山提供参考,尽一点绵薄之力。
