基于混合花粉算法的结构优化设计
2022-10-19姜封国周玉明
姜封国, 曾 枭, 周玉明, 于 正
(黑龙江科技大学 建筑工程学院, 哈尔滨 150022)
0 引 言
随着我国建造业的迅速发展,建筑行业同时也得到了稳步提升。在过去几十年里,结构优化设计迅速发展成为了结构工程领域中最为重要的研究方向之一,在结构优化领域中,传统的优化方法[1-2]主要有最优准则法和数学归划法,由于传统的优化算法,仅能优化简单的结构,而且计算量大,当结构优化设计模型比较复杂时,往往不能够得到很好地解决,但是随着仿生智能算法的快速发展,该问题逐渐得到了解决。
朱钦等[3]构建了一种粒子群-布谷鸟搜索算法(PSO-CS),将PSO-CS算法应用于桁架结构截面尺寸优化设计。康俊涛等[4]研究了一种改进的樽海鞘群算法(ISSA),改进的樽海鞘群算法在桁架结构优化计算精度及稳定性上均有明显的提升。姜封国等[5]提出了一种混合教与学算法(TLBO-TS),将其应用于桁架结构可靠性优化设计。Makiabad等[6]构建了一种增强共生生物算法(ESOS),优化四种基准桁架结构的质量,可以得到更优的解,使优化速度更快。王一镜等[7]给出了一种自适应变异粒子群算法,优化十杆桁架结构,使结构质量最小化。
花粉算法作为一种启发式算法,将其应用于建筑工程领域进行结构优化设计的还比较少。笔者通过改进基本花粉算法的异花授粉、转换概率、自花授粉,将黄金正弦算法作为一个局部算子融合到改进过后的花粉算法中,利用混合花粉算法优化桁架结构,验证混合算法的有效性和适用性。
1 混合花粉算法
1.1 基本花粉算法
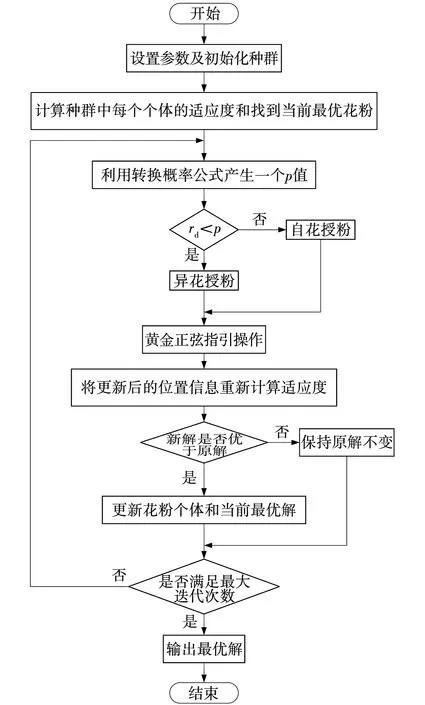
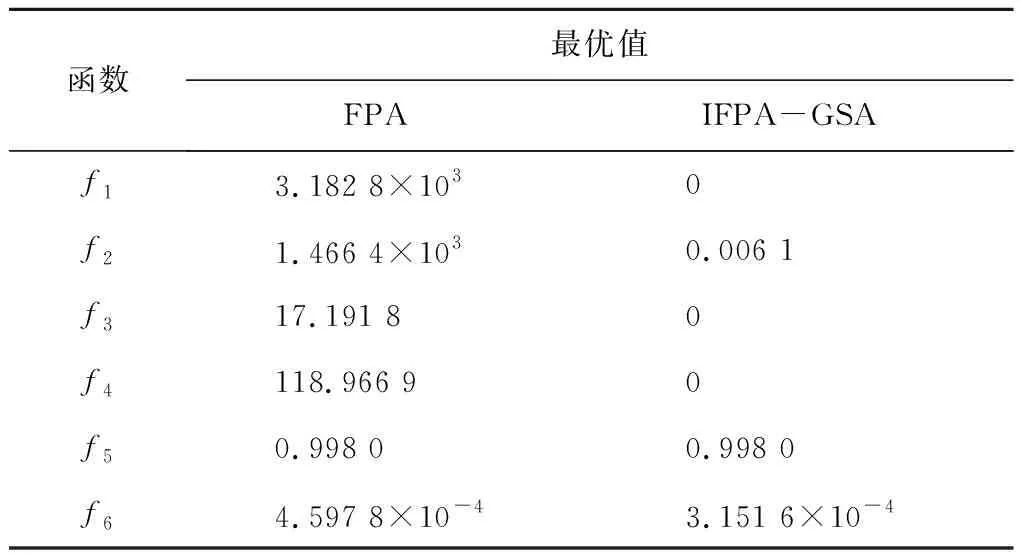
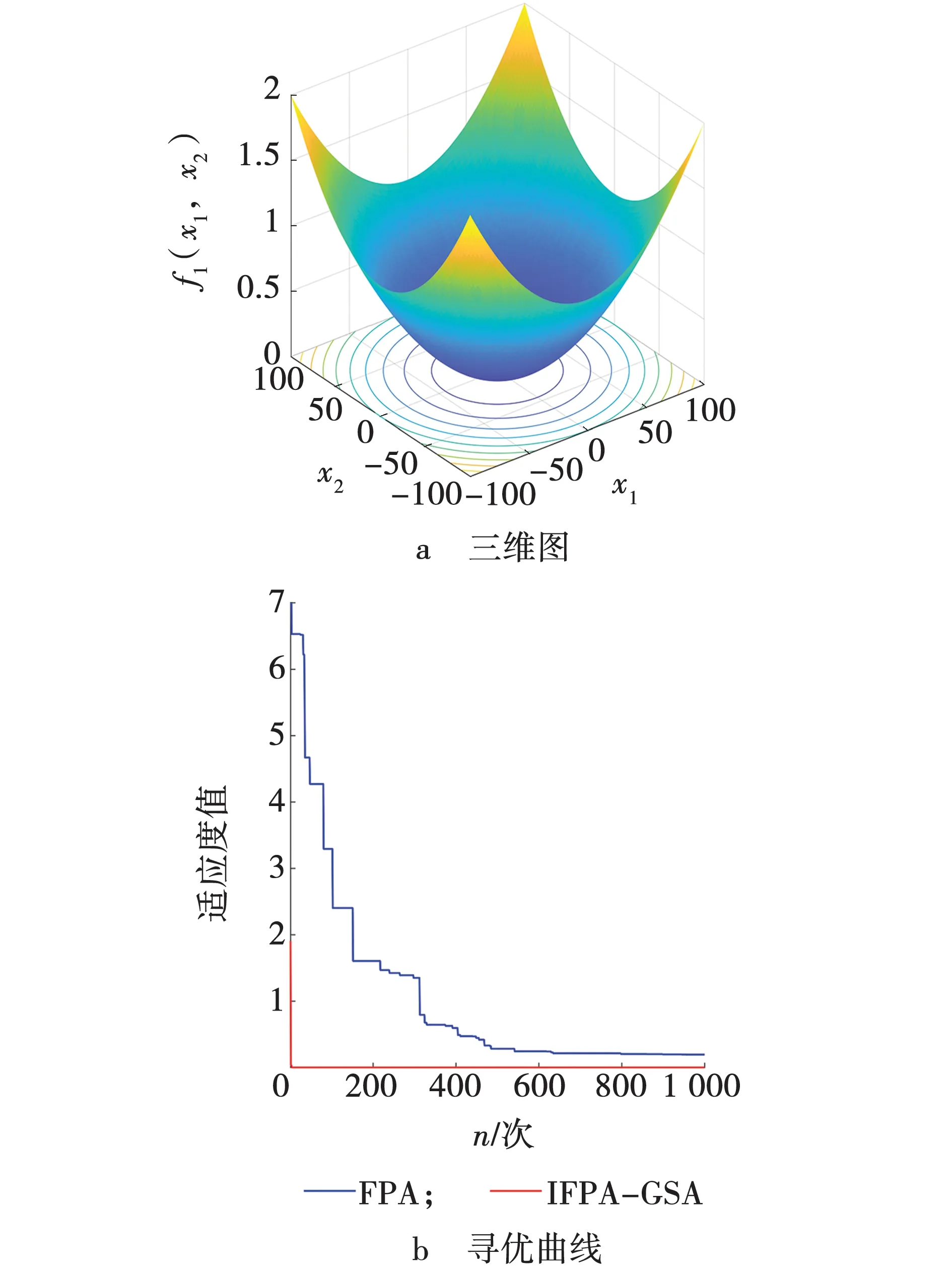
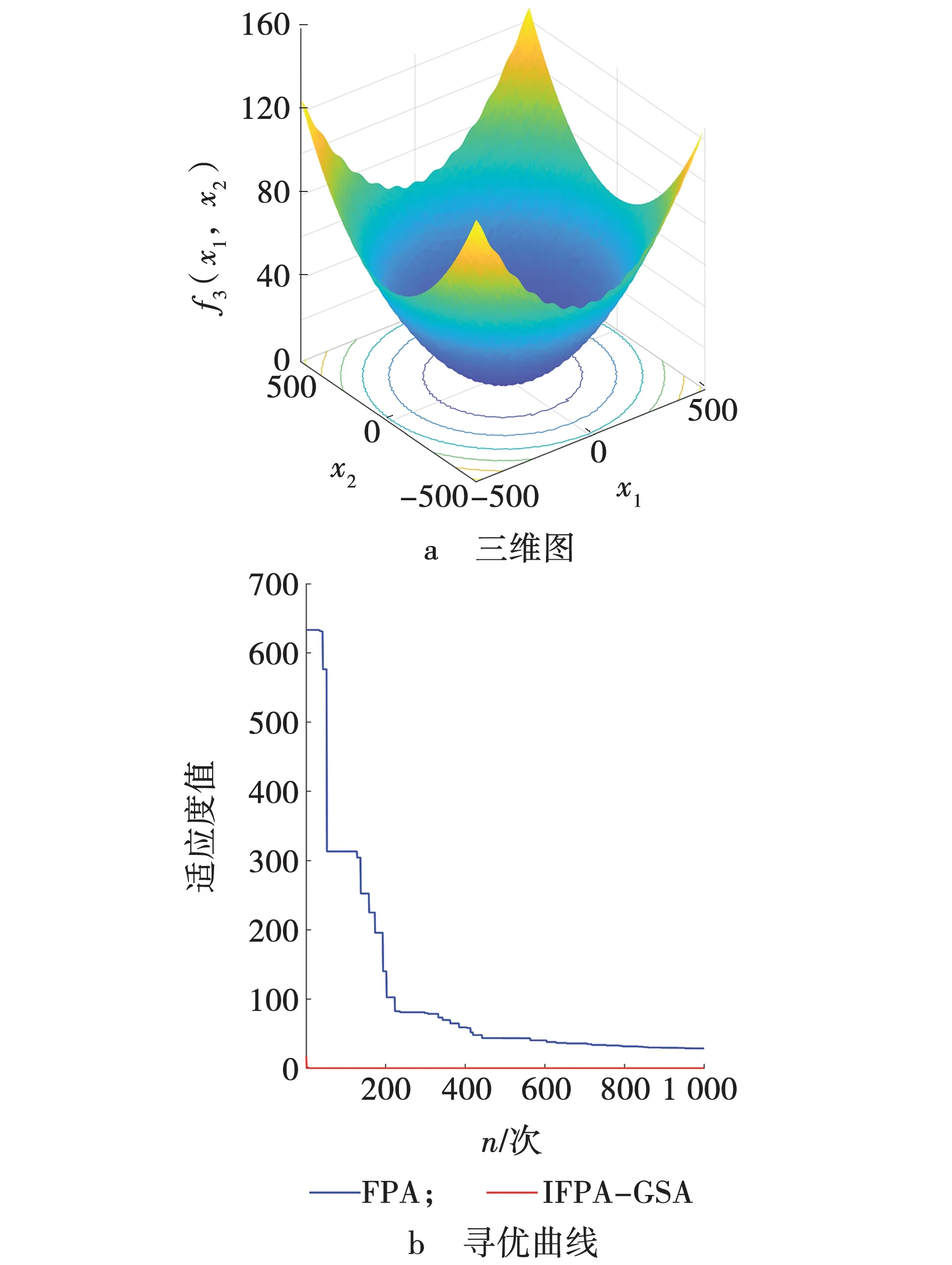
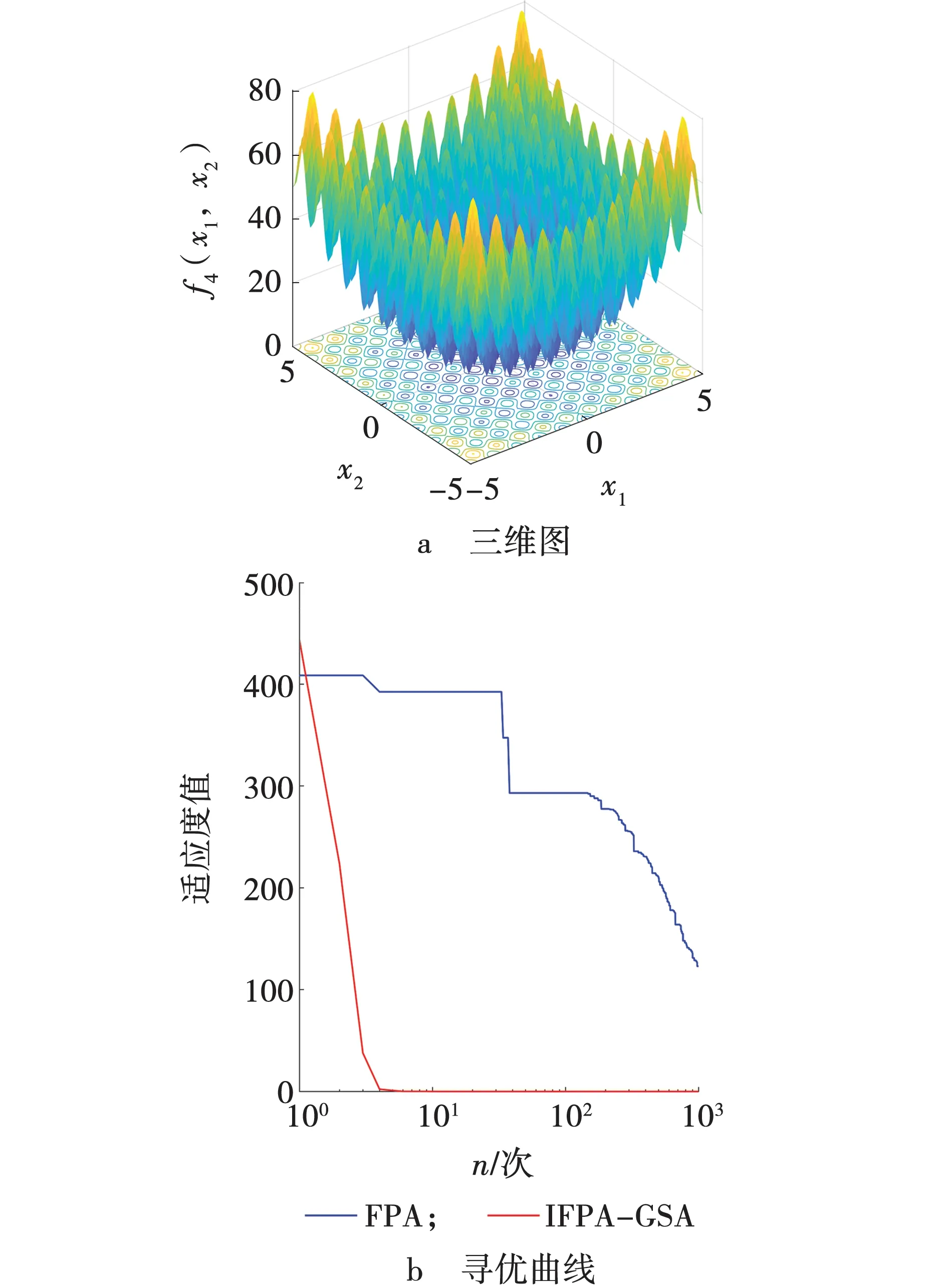
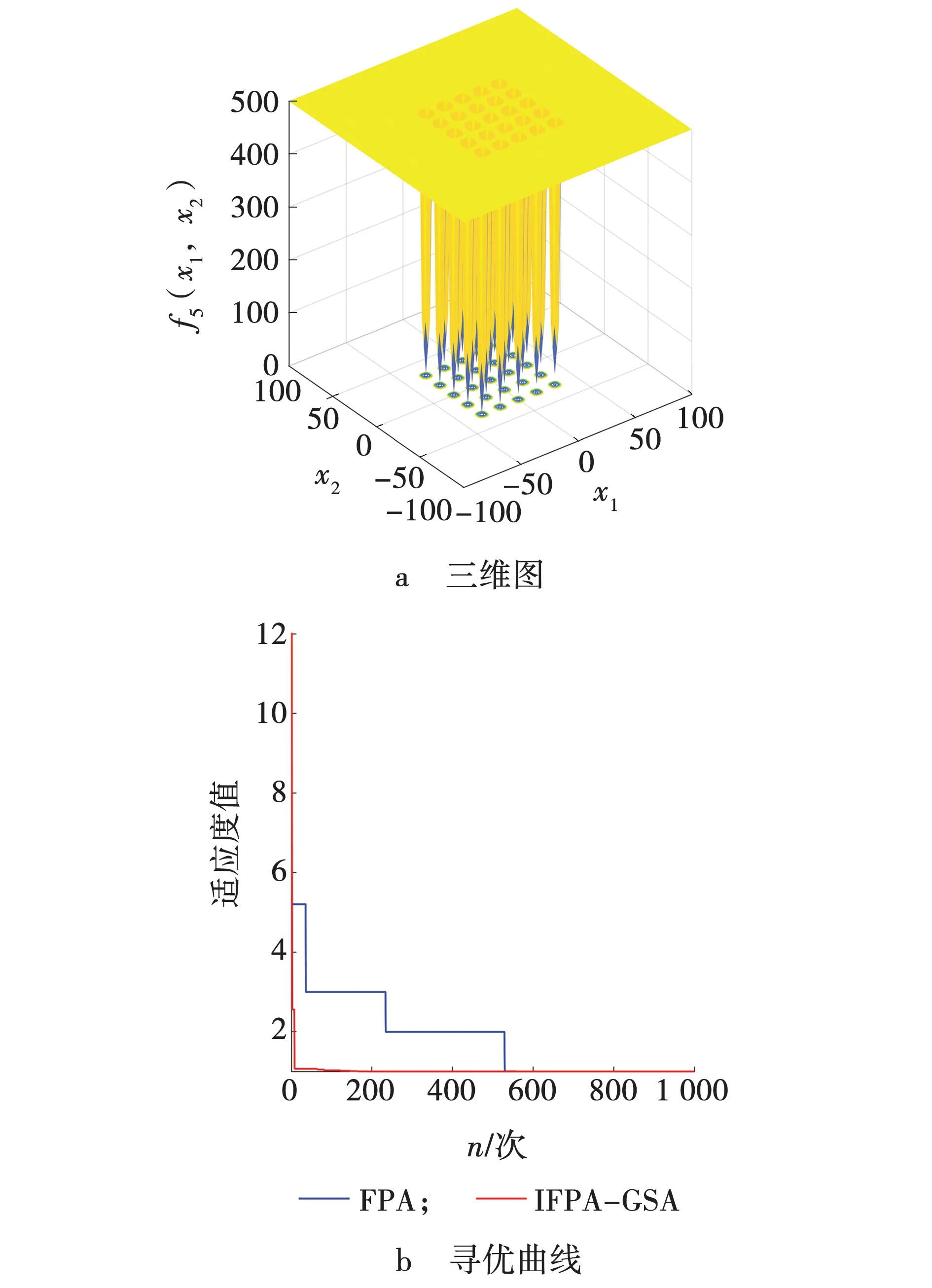
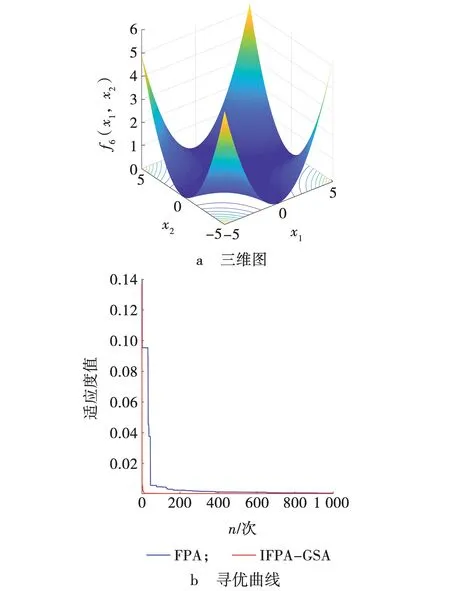
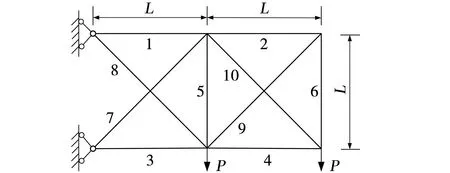
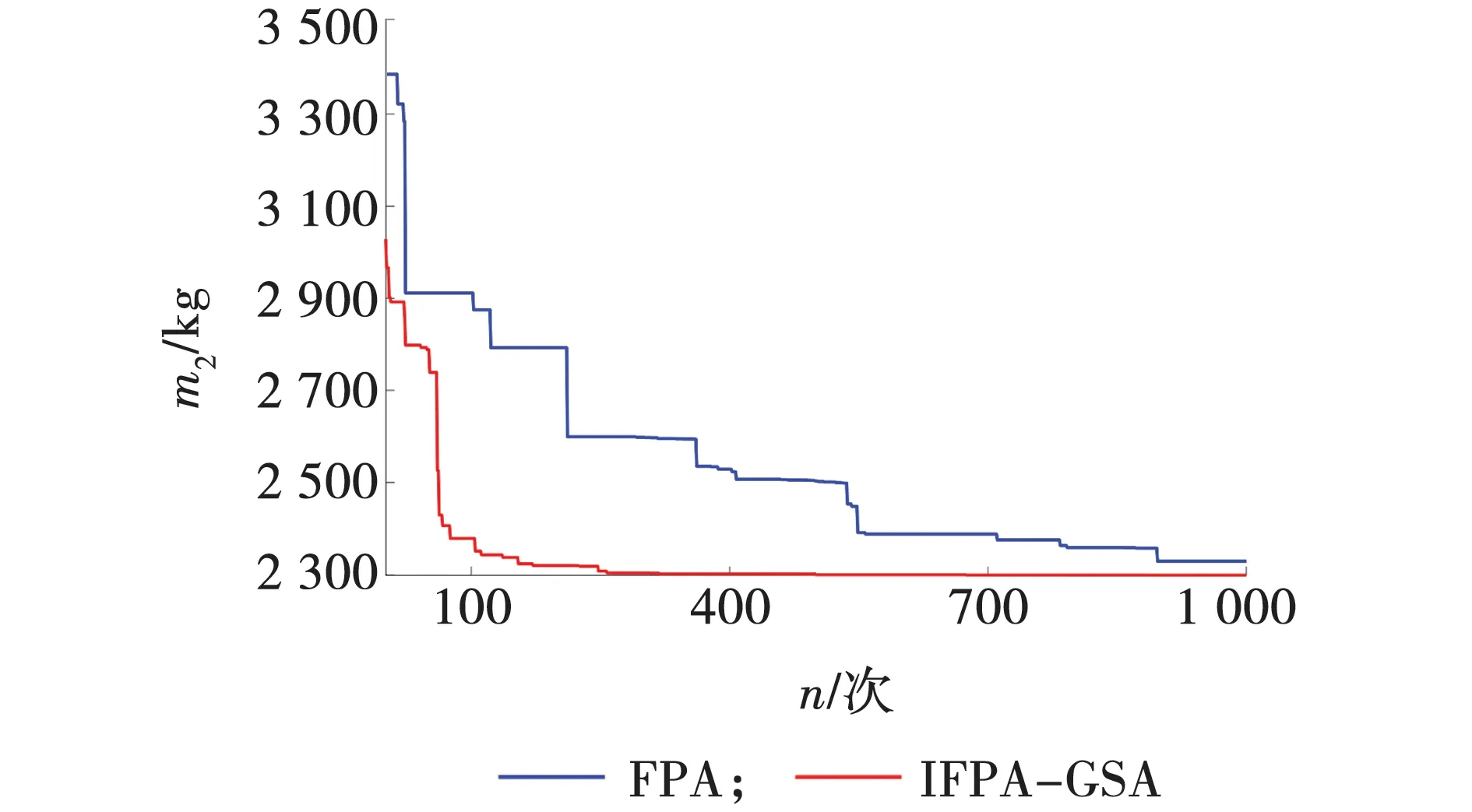
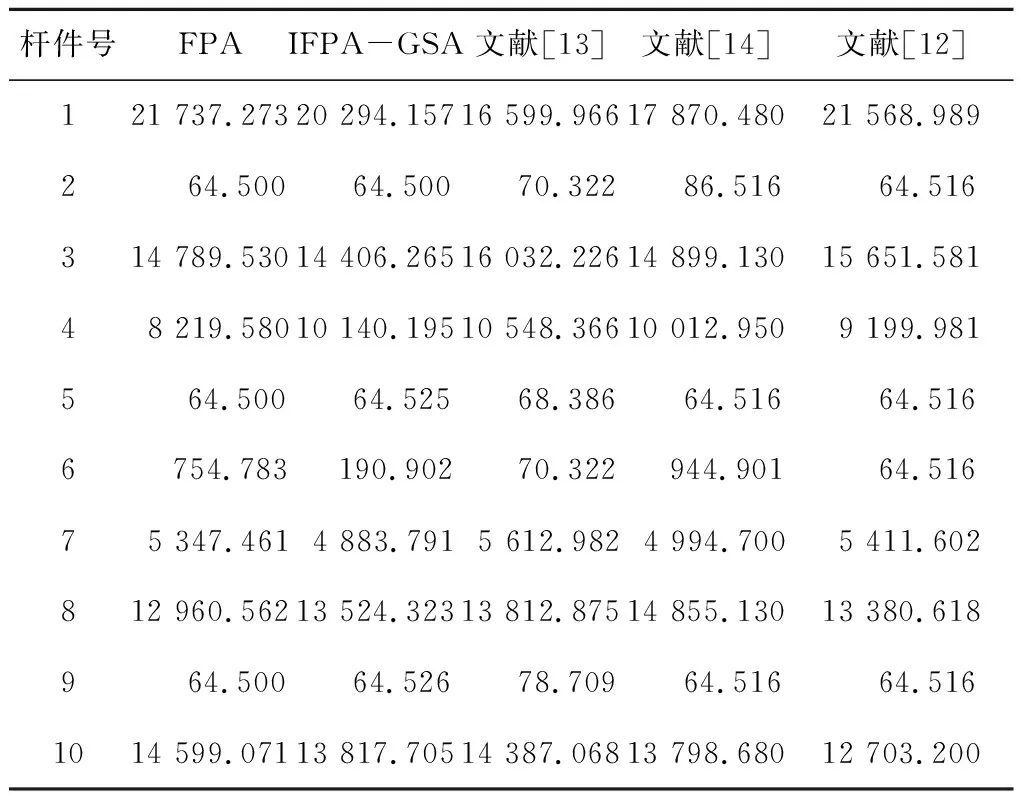
花粉算法[8](Flower pollination algorithm, FPA)具有结构简单,算法环节所操作的参数少、易于调节、鲁棒性好,算法迭代结果稳定性强等优点。花粉算法遵循以下规则[9]:在异花授粉时,传粉者通过levy飞行进行花粉传播,该过程对应为全局搜索过程;自花授粉过程对应为算法的局部搜索过程;花的恒常性能够被认为是繁殖概率与涉及授粉过程中两朵花的相似度成正比;异花授粉和自花授粉两种授粉方式之间的转换由转换概率p(p∈[0,1])来控制,即当rd 花粉算法包括两个主要的过程[9]:即异花授粉和自花授粉。异花授粉对应的全局授粉过程为 (1) L——步长参数,服从莱维分布; g*——当前种群中的最优解。 自花授粉对应的局部授粉过程为 (2) 式中:ε——繁衍概率,属于[0,1]上的均匀分布的一个随机数; 1.2.1 异花授粉的改进 在算法运行过程中,为了保持对最优解搜索的针对性,文中参考了基本PSO算法中引入惯性权重的思想,引进一种非线性递减惯性权重的方式加入到全局授粉过程中。为了在一定的迭代次数限制条件下合理利用全局的种群信息,设置一种非线性递减惯性权重策略去降低后一个体对前一个体的学习程度,这就有利于花粉个体对整个种群中全局最优花粉位置的学习,有利于加快算法的收敛速度。非线性递减惯性权重的公式为 (3) 式中:Wmax、Wmin——惯性权重的最大值和最小值,文中Wmax=0.9,Wmin=0.4; r——调节因子,控制W的变化率,文中r=1; t——当前迭代数; Tmax——最大迭代数。 改进后的异花授粉阶段更新策略为 (4) 1.2.2 转换概率的改进 转换概率p是均衡两种授粉方式的比重,取值范围为[0,1],即p∈[0,1],当rd (5) 由式(5)可知,转换概率p的取值由0.8到0.2之间不断变化,在迭代初期,p的取值较大,算法主要进行全局搜索,扩大搜索范围,能够使种群中的个体向着最优解靠近,随着迭代次数的加大,p的取值慢慢向0.2靠近,算法逐渐侧重于局部的细致搜索,有利于找到最优值。动态调整转换概率在提高算法收敛速度的同时,能够使算法跳出局部最优解。 1.2.3 自花授粉的改进 (6) 黄金正弦算法[10](Golden sine algorithm,GSA)是在位置更新过程中引进了黄金分割系数,使GSA算法在每次迭代过程中能够对产生优秀解的区域进行充分的搜索,而不是整个区域,提升算法的寻优速度,具有较强的局部搜索能力。GSA算法的核心为解的更新过程,首先随机产生s个个体,然后通过位置更新公式对每个个体进行位置更新,位置更新公式为 (7) R1——[0,2π]之间的一个随机数,掌控着下代个体的移动距离; R2——[0,π]之间的一个随机数,掌控着下代个体的移动方向; 文中将黄金正弦算法和花粉算法融合起来,黄金正弦算法作为局部算子融入到改进后的花粉算法中,在迭代后期对整个IFPA算法花粉个体进行黄金正弦操作优化,黄金正弦机制的引入可以促进种群之间的信息传递,使一般的花粉个体与最优花粉个体进行信息交流,充分吸收与最优花粉个体的位置差的信息,达到优化算法的寻优方式,能够改善算法后期迭代收敛速度慢,收敛精度不高的缺陷,在很大程度上减少了算法陷入局部最优解的概率。 文中的IFPA-GSA算法分为6个步骤,其算法流程如图1所示。 图1 IFPA-GSA算法流程Fig. 1 Flow of IFPA-GSA algorithm 步骤1初始化花粉个体种群规模N,设置动态转换概率p,迭代次数Tmax等参数,同时寻找当前最优花粉g*,计算其适应度。 步骤2基于动态转换概率,算法进行主循环部分。当rd 步骤3将异花授粉和自花授粉的个体进行黄金正弦指引操作,重新计算其适应度值。 步骤4根据解的优劣程度判断是否更新花粉个体。当新花粉个体的适应度小于原花粉的适应度,则更新花粉个体,并将新花粉个体的适应度与当前最优花粉个体的适应度进行比较,若新花粉个体的适应度小于当前最优花粉的适应度,那么替换历史最优花粉个体,否则,重新回到步骤2。 步骤5判断算法是否达到最大迭代次数,满足进行步骤6,不满足返回步骤2进行主循环部分。 步骤6输出全局最优解。 为了测试混合花粉算法(IFPA-GSA)的优化能力,以及进行结构优化设计的可行性,文中选取了6个测试函数对混合花粉算法进行寻优测验。为了进行全方位的测试,选取了三种不同类型的测试函数,测试函数可分为三类[11]:单峰测试函数、多峰测试函数和固定维多峰测试函数。 单峰测试函数f1(x)和f2(x)分别为 多峰测试函数f3(x)和f4(x)分别为 固定维多峰测试函数f5(x)和f6(x)分别为 单峰测试函数f1(x)和f2(x)维度均为30,理论最优值都为0。多峰测试函数f3(x)和f4(x),维度也为30,理论最优值也都为0。固定维多峰测试函数f5(x)和f6(x),函数f5(x)的维度为2,理论最优值为1,函数f6(x)的维数为4,理论最优值为0.000 3。实验参数设置为种群规模n=20,算法的最大迭代次数为1 000次。 测试函数迭代收敛曲线以及得到的最优解如图2~7和表1所示。 表1 测试函数实验结果 图2 函数f1三维图及寻优曲线Fig. 2 Function f1 graphic model and optimization curve 图3 函数f2三维图及寻优曲线Fig. 3 Function f2 graphic model and optimization curve 图4 函数f3三维图及寻优曲线Fig. 4 Function f3 graphic model and optimization curve 图5 函数f4三维图及寻优曲线Fig. 5 Function f4 graphic model and optimization curve 图6 函数f5三维图及寻优曲线Fig. 6 Function f5 graphic model and optimization curve 图7 函数f6三维图及寻优曲线Fig. 7 Function f6 graphic model and optimization curve 由图2~7可以看出,在对三种不同类型的测试函数进行寻优测试时,FPA-GSA算法的收敛速度要明显优于FPA算法。由图6和表1可知,在函数f5中,FPA算法和IFPA-GSA算法所得的目标函数值均相同,但是IFP-GSA算法的收敛速度要优于FPA算法。这表明IFPA-GSA算法在收敛速度方面要强于基本花粉算法,进一步表明了混合花粉算法在优化速度方面得到了一定的提升。从表1的优化结果可以看出在f1、f3、f4函数中,IFPA-GSA算法在迭代过程中都得到了理论最优值0,而基本花粉算法未得到理论最优值,说明混合花粉算法在收敛精度方面也得到了提高。综上可以得出,改进之后的混合花粉算法具有更好的全局搜索性能。 桁架结构尺寸优化设计就是在给定的荷载情况下,满足应力约束和位移约束的限制条件下,以每个杆件的截面面积为设计变量,找到每个杆件截面面积的最优面积值,使结构的质量最轻。 设计变量为 A=[A1,A2,…,An]T, 目标函数为 (8) 式中:n——杆件的总数; W——结构的总质量; ρi——第i根杆件对应的截面密度; Ai——第i根杆件对应的截面面积; Li——第i根杆件对应的长度; λ——位移和应力约束因子,当满足位移约束和应力约束时,λ的取值为0,当不满足约束时λ取值为1; M——一个很大的数,当不满足约束情况时,即λ=1时,给目标函数一个很大的值,给设计变量起到惩罚的作用。 应力约束和位移约束条件为 (9) Amin≤A≤Amax, [σk]——杆件所对应的许用应力值; σk——杆件在各种荷载作用下所能承受的最大应力值; K——杆件的总数目; [ujl]——在特定的某个节点j给定l方向上的许用位移值; ujl——在各种荷载作用情况下杆件变形所导致的最大位移值; m——结构的结点总数; d——约束的维度; Amin、Amax——设计变量的上下限。 文中以经典10杆平面桁架为优化算例,建立在应力和位移约束的限制条件下的桁架结构优化模型,讨论FPA算法以及IFPA-GSA算法优化桁架结构的可行性和有效性。10杆平面桁架如图8所示。 桁架结构优化的目标是使结构的总质量最轻,即使每根杆件的截面面积最小,每根杆件的截面面积为设计变量,杆件所使用的材料都相同,结构材料的有关参数为弹性模量E=68 950 MPa,材料密度ρ=2 768 kg/m3,荷载P=444.5 kN,L=9.144 m。截面设计变量下限的取值为Amin=6.45×10-4m2,上限的取值为Amax=2.58×10-2m2,各节点的应力约束为|σk|≤172.3 MPa (k=1,2,…,10),位移约束为dmax≤50.8 mm。算例的种群规模为N=40,最大迭代次数为Tmax=1 000,优化迭代收敛曲线如图9所示,优化结果对比汇总如表2所示。其中,总质量m2。 图8 10杆平面桁架Fig. 8 10 bar plane truss 图9 10杆平面桁架迭代收敛曲线Fig. 9 Iterative convergence curve of 10 bar plane truss 表2 10杆平面桁架优化结果及比较 由图9可知,改进后的混合花粉算法不管是在优化的收敛速度上还是优化的最终结果上均比基本花粉算法更加理想。由表2可知,IFPA-GSA算法的优化结果比FPA算法的优化结果要更优,FPA算法的目标函数值为2 333.700 kg,IFPA-GSA算法的目标函数值为2 298.860 kg,文献[12-14]优化的结果分别为2 308.370、2 311.386、2 317.370 kg,从实验结果可知,IFPA-GSA算法优化的结果较FPA算法优化的结果重量减少了1.49%,比文献[12]的优化结果重量减少了0.41%,比文献[13]的优化结果重量减少0.54%,比文献[14]优化结果重量减少了0.80%,从这些结果可以得出,混合花粉算法能够在更少的迭代次数下得到更优的目标函数值,说明改进过后的混合花粉算法在平面桁架结构优化上具有一定的适用性。 (1)针对基本花授粉算法随着迭代次数的增加,算法后期收敛速度缓慢,寻优精度低,而且容易陷入局部最优值的缺点,对花粉算法进行全局授粉、转换概率、局部授粉的改进,在将改进的花粉算法与黄金正弦算法混合进行黄金正弦操作,提出了IFPA-GSA混合算法,经过6个不同模态测试函数测试表明,IFPA-GSA算法在收敛速度上以及收敛精度上均比基本花粉算法更优。 (2)以平面桁架结构作为结构优化的研究对象,建立了在应力和位移约束限制条件下的桁架结构优化设计的数学模型,以各个杆件的截面面积作为设计变量,结构的总质量为目标函数,进一步将IFPA-GSA算法应用于桁架结构尺寸优化设计中,算例结果表明,IFPA-GSA算法较FPA算法在优化结果上减少了1.49%,而且比其他文献所优化的结果更加理想,表明了IFPA-GSA算法在桁架结构尺寸优化设计是可行的和适用的。
1.2 改进的花粉算法

1.3 黄金正弦算法


1.4 IFPA-GSA算法
2 混合花粉算法的寻优能力
3 桁架结构优化模型



4 算例分析
5 结 论