水下无人航行器空间运动建模与操纵性仿真预报
2022-10-19常开应王庆云沈鹏臧斌
常开应,王庆云,沈鹏,臧斌
(1.昆明海威机电技术研究所(有限公司),云南 昆明 650217;2.国家深海基地管理中心,山东 青岛 266237)
0 引 言
水下无人航行器(UUV)是海洋资源开发、海洋环境监测及海洋生态保护等的关键装备之一。近年来,随着人类对深海资源开发的不断深入,UUV 由于在军事与科研方面有重要应用,引起了广泛关注,研究价值和意义也日益凸显。
操纵性能是UUV 总体性能的主要指标之一,直接影响着航行器执行作业任务的能力,在航行器初步设计和运动控制参数选取时,操纵性能的预报尤为重要。建立合理的空间运动数学模型是研究UUV 操纵性及控制系统设计的基础,王波、赵金鑫等参考潜艇操纵性研究的方法搭建了非线性的UUV 空间运动数学模型进行了仿真预报,段斐等针对REMUS 模型中的推力(力矩)和舵力(力矩)难于获取等问题,提出了一种修正的REMUS 模型并完成了航行器的运动仿真预报。戴君锐等采用六自由度模型完成了UUV操纵运动仿真,并与K-T 模型的仿真结果进行了对比。徐得志等参考舰船操纵性理论研究方法,采用四阶龙格-库塔算法对UUV 垂向操纵运动进行了研究。聂为彪等建立了UUV 水平面内的动力学方程,应用Matlab 编程对研究对象的水平面操纵运动进行了预报。
本文基于水下航行力学基本原理,参考鱼雷操纵性基本理论,在小冲角、小侧滑角、小机动运动条件下导出了UUV 六自由度空间运动的线性数学模型,并搭建了操纵运动仿真预报平台,对某型UUV 单平面典型操纵运动特性进行仿真预报,为UUV 水动力布局和控制系统的设计提供一定的技术指导与理论支撑。
1 UUV 空间运动数学模型
1.1 基本假设
1)UUV 是刚体,并关于 平面对称;
2)流体是无粘不可压缩的;
3)流体为无界流场,在航行体运动之前是静止的;
4)坐标原点与UUV 浮心重合;
5)不考虑地球的自转和地球的曲率,近似认为地面坐标系为惯性坐标系。
1.2 坐标系选择与运动学参数
采用如图1 所示坐标系,包括地面坐标系EXYZ和航行体坐标系。地面坐标系与大地相连,航行体坐标系与UUV 相连,坐标原点与UUV 浮心重合。
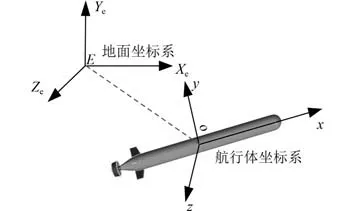
图1 水下无人航行器坐标系Fig.1 Coordinate system of underwater unmanned vehicle

运动参数包括:
1)UUV 在地面坐标系中的位置(X,Y,Z)和姿态角(φ,ψ,θ);
2)航行体坐标系下的UUV 速度(v,v,v)和角速度(ω,ω,ω);
3)UUV 速度和速度的流体动力角 α,β关系如下式:
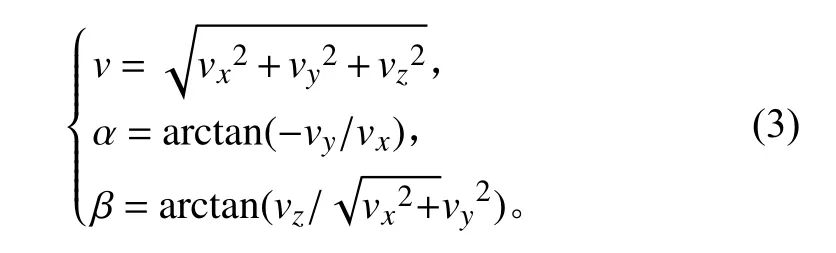
1.3 运动学方程
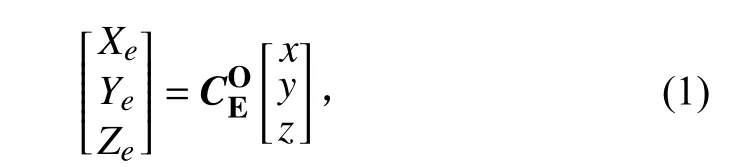
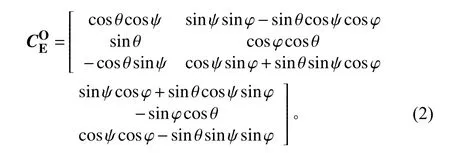
根据UUV 速度在地面坐标系和航行体坐标系下的转换关系,可得平动运动学方程:


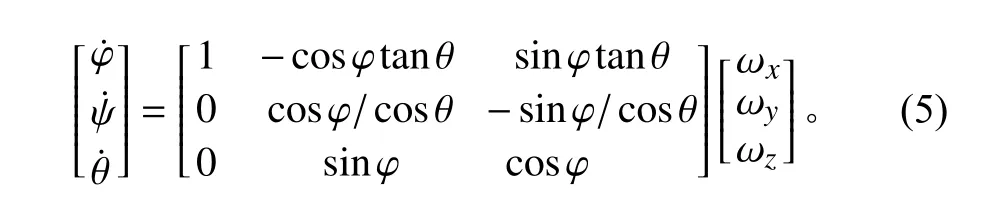
由UUV 旋转角在地面坐标系和航行体坐标系下的关系,可得转动运动学方程:
1.4 动力学方程
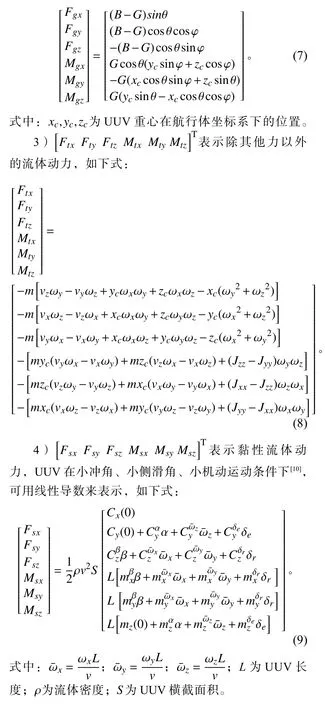
根据动量定理和动量矩定理,可以得到UUV 在无流界中的动力学运动方程,并通过系列的推导,可表示为矩阵形式:

式中:

2 UUV 操纵运动仿真平台搭建
搭建操纵性仿真预报平台,该平台将航行体空间运动数学模型分为姿态角模型、速度转化模型、粘性流体动力模型、静水力模型、其他力模型、坐标系转换模型等。
仿真预报过程中采用变步长四阶-五阶Runge-Kutta 算法,输入UUV 基本参数及水动力参数,并赋予初始速度、推力和舵角,运行程序后便可输出对应时刻UUV 的姿态角、位置、速度等,生成对应曲线图,即可对UUV 的操纵性能进行预报。
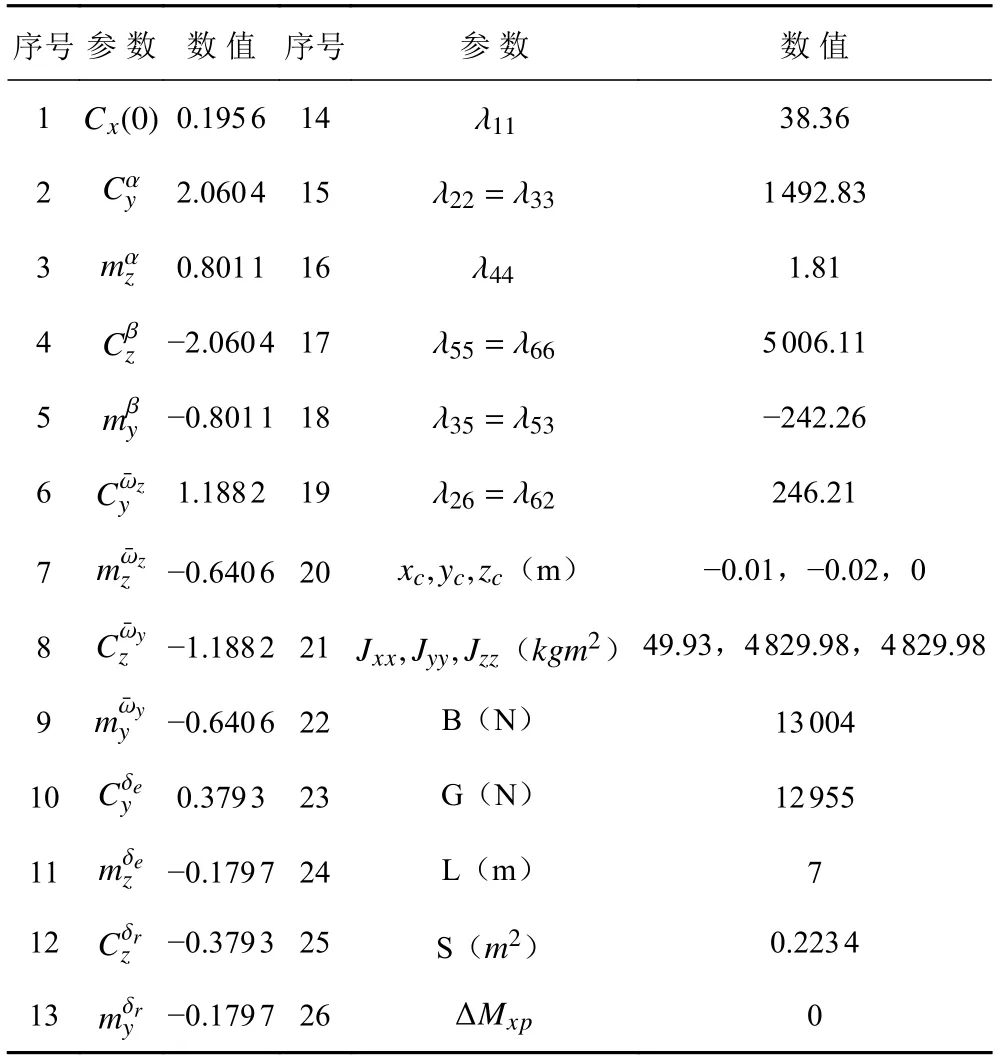
表1 UUV 总体参数Tab.1 The parameters of underwater unmanned vehicle
3 UUV 操纵运动仿真预报
3.1 水平面运动仿真
3.1.1 回转运动预报
给定推力值=95.96 N,对应设计航速4 kn,初始速度=2 m/s,并分别操垂直舵 δ=10°,15°,20°,其浮心的运动轨迹详如图2 所示,结果如表2 所示。
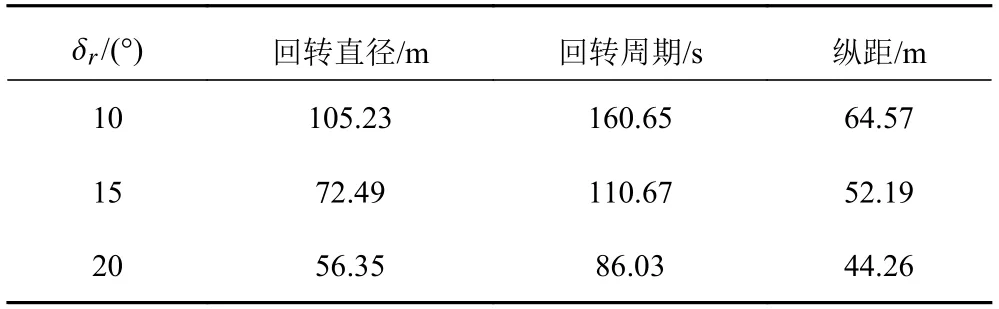
表2 UUV 回转运动特征参数Tab.2 Rotary motion characteristic parameters of underwater unmanned vehicle

图2 航速4 kn 时,不同舵角的回转曲线Fig.2 Rotation curve of different rudder angles at 4 kn
可以看出,在设计航速为4 kn 下,舵角越大,回转直径、回转周期和纵距越小。在操大舵角20°时,回转直径为56.3 m,约为航行体长(7 m)的8 倍,可以看出该UUV 具有较高的水平面回转性能。
3.1.2 水平面Z 形操舵预报
给定推力值,初始速度,对应航速分别为4 kn和8 kn 下,对于 δ/ψ=15/15进行Z 型操舵运动,反复操舵4 次,其偏航角 ψ 和舵角 δ随时间的变化轨迹如图3 所示。由此得到UUV 的初转期t、超越时间、超越偏航角 ψ、全周期T等特征参数,便可评估UUV 水平面航向改变性能。
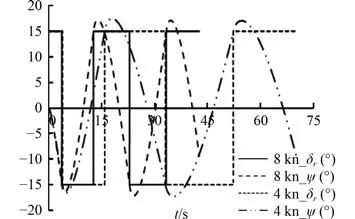
图3 不同航速下,偏航角 ψ 和舵角 δr随时间的变化曲线Fig.3 Curves of yaw angle ψand rudder angle δr with the change of time at different speeds
从表3 可以看出,航速8 kn 时,UUV 的初转期t、超越时间、超越偏航角 ψ、全周期T均比低航速4 kn 时小。此外,还可以看出,该UUV 具备良好的应舵性和操纵性,响应时间快。
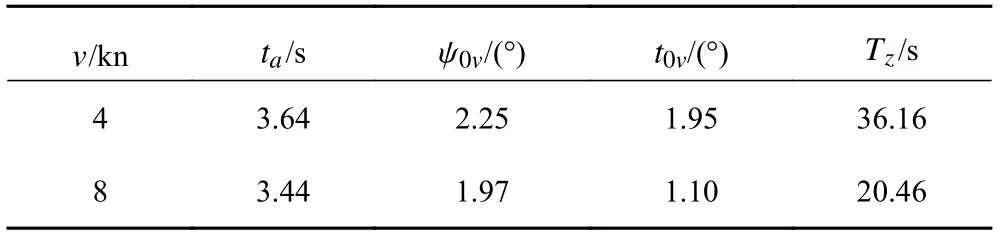
表3 UUV Z 形操舵运动特征参数Tab.3 Z-shape motion characteristic parameters of underwater unmanned vehicle
3.2 垂直面运动仿真
3.2.1 垂直面T 形操舵预报
给定推力值,初始速度,对应航速分别为4 kn和8 kn 下,操升降舵 δ=15,UUV 的俯仰角 θ和深度Y等都在改变,当俯仰角达到设定俯仰角10°时,立即回舵到初始状态,当俯仰角速度为0 时,θ达到稳定值,UUV 稳定在一个新的航向上。升降舵 δ、俯仰角θ、航行深度Y随时间的变化轨迹如图4 所示。
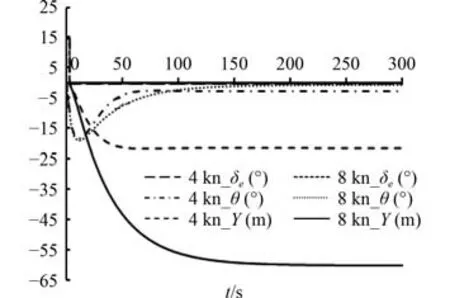
图4 不同航速下,升降舵 δe、俯仰角 θ、航行深度Ye随时间的变化曲线Fig.4 Curves of elevator δe、pitchθ and depth Y e with the change of time at diff erent speeds
从表4 两个响应航速结果可以看出,航速越大,UUV 的初转期t越小,说明UUV 的应舵更快,转首性好,下潜快,但同时超越俯仰角 θ和越深度 ξ也越大。此外,从图4 可以看出,航速越大,航行器稳定在新的航向上的时间也越长。
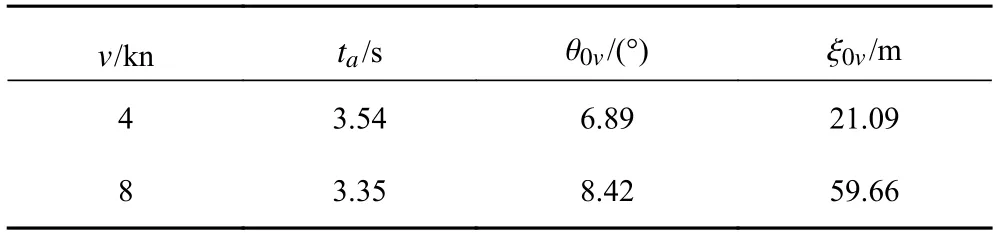
表4 UUV T 形操舵运动特征参数Tab.4 T-shape motion characteristic parameters of underwater unmanned vehicle
3.2.2 垂直面纯下潜预报
给定推力值T,初始速度,在设计航速4 kn 下,分别操横舵 δ= 15°,10°进行下潜,其俯仰角 θ和深度Y随时间的变化轨迹如图5 所示。
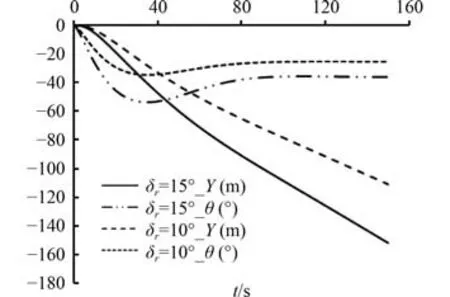
图5 航速4 kn 时,俯仰角 θ、航行深度 Ye 随时间的变化曲线Fig.5 Curves of pitchθ and depth Y e with the change of time at 4 kn
从图5 可以看出,在同一航速为4 kn 下,操横舵角越大,UUV 转首性越好,下潜得也越快,但对应稳定后的俯仰角也越大,符合UUV 的实际操纵运动特性。
4 结 语
本文基于水下航行力学基本原理,参考鱼雷操纵性基本理论,导出了UUV 六自由度空间运动线性数学模型,并搭建了操纵运动仿真预报平台,采用变步长四阶-五阶龙格-库塔(Runge-Kutta)算法,对某型UUV 的水平面回转、Z 形操舵运动以及垂直面T 形操舵、纯下潜等运动进行了仿真预报。仿真结果表明,该UUV 具备良好的应舵性和操纵性能,响应时间较快,能真实地反映研究对象的操纵运动特性,其结果可为UUV 水动力布局和控制系统的设计提供一定的技术指导与理论支撑。
