基于一维深度残差收缩网络的汇流行星排齿轮裂纹故障诊断
2022-10-17田钦文冯辅周陈晓明朱俊臻
田钦文, 冯辅周, 李 鸣, 陈晓明, 朱俊臻, 胡 浩, 宋 超
(1.中国人民解放军31628部队, 广东 韶关 512000; 2.陆军装甲兵学院, 北京 100072)
汇流行星排是现役新型装甲车辆综合传动装置的关键部件,在装备机动训练与作战中发挥着重要作用。通常,装甲车辆行驶的路况偏差,地形复杂,综合传动装置在行驶中受到地面激励会引起车体产生较大振动、瞬时冲击等现象,直接导致汇流行星排中的齿轮因瞬时振动冲击会产生较大的磨损,出现裂纹甚至断裂等现象,严重制约传动装置的运行可靠性和使用寿命。因此,为确保装备机动性能的有效与持续发挥,必须深入开展汇流行星排典型故障的检测、诊断及预测等研究工作。在齿轮的常见故障中,通常点蚀处于故障早期阶段,点蚀的扩展会造成轮齿根部裂纹,严重时将出现断齿。齿轮出现断齿的后果非常严重,裂纹作为断齿的早期状态,分析裂纹故障对于保障装备传动装置的安全可靠运行具有十分重要的意义。
现在对汇流行星排齿轮的诊断方法很多,主要采集的状态参数有声信号、温度信号及振动信号等。相比其他信号而言,振动信号容易获取,且更能直观地反映齿轮健康状态,因此在齿轮故障诊断研究中多采用振动信号作为故障信号源。基于信号的故障诊断主要有两类常用方法:① 信号的特征提取方法;② 深度学习方法。
特征提取是指从振动信号众多特征参量中找到最有效的特征。一个完整的特征提取涵盖了特征从形成、经选择或变换直接得出有效特征这一全过程。常用的方法有经验模态分解(empirical mode decomposition, EMD)[1]、小波变换(wavelet transform, WT)[2]、Winger-Ville[3]等。例如,Ben Ali等[4]利用EMD提取时域特征, 并通过优化后的BP神经网络实现故障识别;Zhao等[5]利用稀疏滤波,选择较好的特征,结合VMD进行故障诊断;冯志鹏等[6-]采用包络谱、瞬时傅里叶频谱等方法对齿轮箱故障诊断。
深度学习是机器学习的一种,通过组合低层特征形成更加抽象的高层表示属性类别或特征,以发现数据的分布式特征表示。卷积神经网络(convolutional neural network, CNN),深度置信网络(deep belief network, DBN),堆栈式去噪自编码器(stacked denoised autoencoder, SDAE),残差神经网络(residual network, ResNet)等作为深度学习的代表,在故障诊断领域取得丰硕的成果。Chen等[9]利用单卷积层结合全连接层实现齿轮故障诊断;薛璇怡等[10]通过一维卷积网络实现齿轮箱故障预测;Shao等[11]通过人工鱼群算法优化堆叠自编码器的参数,对齿轮箱和电力机车滚子轴承进行诊断;赵光全等[12]利用DBN进行轴承振动信号频谱故障特征提取。
由于使用环境路况较差,以及装甲车辆中存在多个激振源,这些振动成分都混杂在采集到的信号中,对判断汇流行星排是否发生故障有一定的干扰,上述方法均未考虑到该种情况,故障的诊断存在一定的偏差。基于此,本文通过在神经网络模型中加入软阈值化(soft thresholding)及注意力机制,本文提出一种基于一维深度残差收缩网络的汇流行星排裂纹故障诊断方法,较其他深度学习方法相比,该方法有良好的从噪声信号中学习特征的能力,能够取得较高的故障诊断准确率。
1 理论背景
1.1 一维卷积神经网络
CNN是受猫的视觉系统启发而建立的神经网络,被广泛应用于图像识别领域。卷积神经网络应用于振动信号的故障诊断常见的有两种方法,一种是将振动信号转换为二维图像,再将二维图像输入到CNN种进行故障诊断,Chen等[13]绘制出时域信号的频谱图,再通过CNN识别特征;韩涛等[14-15]对滚动轴承的振动信号进行MWT,并用所得多小波系数构造特征图,作为CNN的输入,以实现滚动轴承故障的诊断识别;李恒等[16]通过傅里叶变换将轴承的振动信号转化为频谱图作为CNN的输入,进行故障诊断。另一种方法是通过改良CNN,直接将一维信号作为输入,也就是一维卷积神经网络(1DCNN)。周奇才等[17]采用改进的一维卷积核和池化层以适应一维时域信号;Janssenso等[18]利用CNN从数据本身中自主学习轴承故障检测的有用特征;Chen等[19]利用CNN直接对齿轮箱振动信号进行故障识别及分类;吴春志等[20]利用1DCNN实现齿轮箱端到端的故障诊断;叶壮等[21]通过1DCNN解决了单通道图像信号输入不能全面表达故障特征的问题。
1DCNN模型如图1所示。同传统CNN模型一样,1DCNN也是由一个输入层,交替出现的卷积层和池化层,全连接层及分类器组成。不同的是,将输入的振动信号假设为一张“图片”,则输入“图片”尺寸为w×1,同时设定1DCNN的卷积核高度为1。
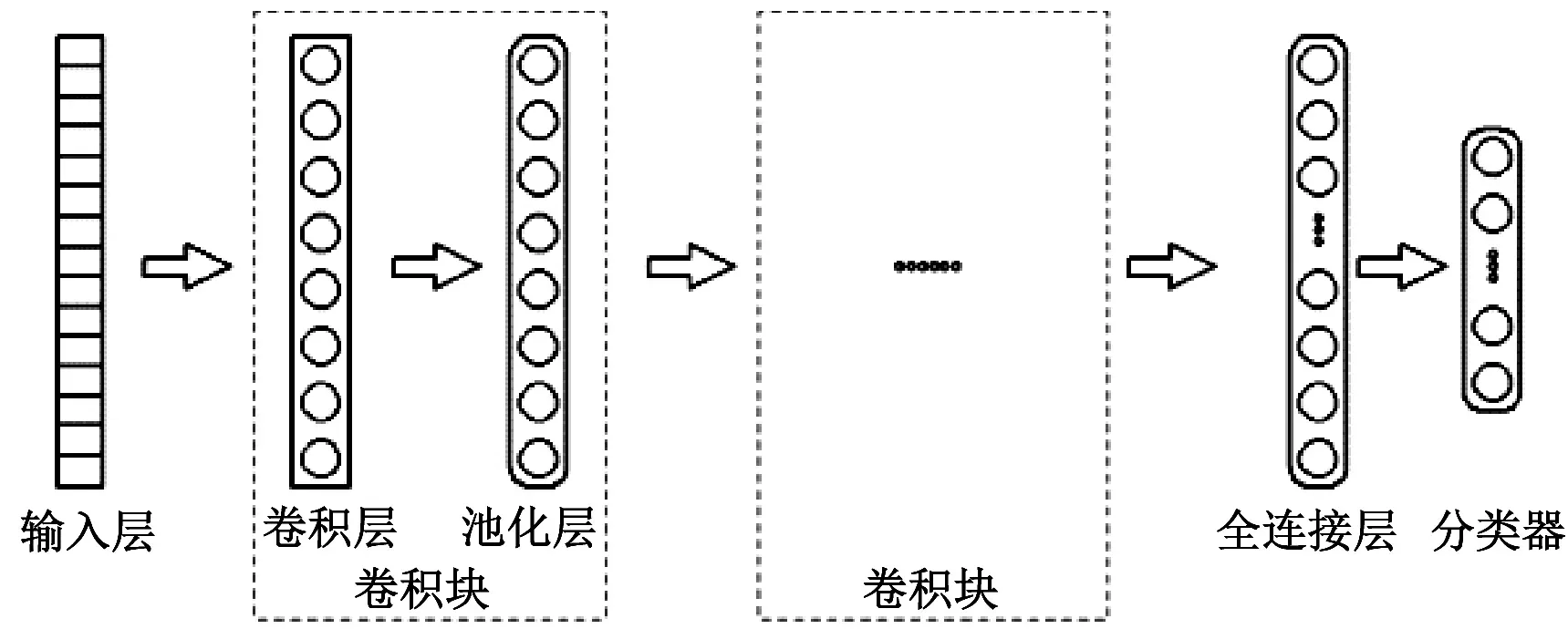
图1 1DCNN模型Fig.1 1DCNN model
卷积层:利用一维卷积核,对输入的一维信号进行一维卷积,输出结果通常为

(1)
式中:N为输入信号的长度;s(n)为卷积结果序列。
池化层:池化层的提出是为了缓解卷积层对位置的过度敏感性,通常的选用最大池化层,找出池化区域中的最大值。
全连接层:全连接层的神经元与输入层的神经元为一一对应的关系,其权重为w,偏差为b,f为激活函数,对于输入X,输出为
output=f(wX+b)
(2)
分类器层:通常选择softmax,对故障状态进行分类。
1.2 残差神经网络
CNN的实质就是无限拟合一个符合对应目标的函数,因此添加层似乎更容易降低训练误差,但是通过研究发现,只是简单地将层堆叠在一起,增加网格的深度并不会起太大的作用。针对这一问题,He等[22-23]提出了ResNet。ResNet在2015年的ImageNet图像识别大赛一举夺魁,并给了后来的深度神经网络设计新的思路。例如,赵小强等[24]改进ResNet对滚动轴承工况进行故障诊断;周兴康等[25]改进ResNet,实现了振动信号的无监督学习,显著提高齿轮箱的故障诊断率。
ResNet是对CNN的进一步改良,它与直接相连的CNN最大的区别就是加入了恒等映射层y=x。其主要作用是使得网络随着深度的增加而不会产生权重衰减、梯度衰减或者消失这些问题。设输入为x,理想映射为f(x),作为激活函数的输入,如图2所示。从图2可知,左图虚线框中的部分需要直接拟合出该映射f(x),而右图虚线框中的部分则需要拟合出有关恒等映射的残差映射f(x)-x。残差映射在实际中往往更容易优化。


图2 直接拟合与恒等映射对比图Fig.2 Comparison of direct fitting and identity mapping
2 一维深度残差收缩神经网络模型
本文将残差网络、注意力机制与软阈值化相结合,提出一种新的模型1D_DRSN,并将其命名为一维深度残差收缩网络(one dimensional deep residual shrinkage networks, 1D_DRSN)。
由于传入网络的汇流行星排振动信号中包含大量的无用信息,因此需设法降低这部分数据带来的影响,使模型更加注重有效信息的学习,本文选择引入注意力机制来解决这一问题。注意力机制[26-29]就是将注意力集中于局部关键信息的机制,其实现过程可以分为两步:① 通过扫描全局信息,发现局部有用信息;② 增强有用信息并抑制冗余信息。Squeeze-and-Excitation Network(SENet)是经典的注意力算法之一,如图3所示。它根据评估各个特征通道的重要程度来为各个通道赋予合适的权重。深度残差收缩网络的原型可认为来自于SENet,其本质上就是将SENet中各个特征通道的加权替换成了各个特征通道的软阈值化。本文将SENet插入残差网络结构中,如图4所示。每个样本都有自己独特的一组权重系数,并且跨层恒等路径的存在,SENet将更容易得到训练。在模型训练时,其损失不仅能通过卷积层等进行逐层的反向传播,还能通过残差项的恒等映射以实现更为方便的反向传播。再通过软阈值化处理信号,从而得到更优的模型[30]。其工作原理为:通过注意力机制确定不重要的特征,再通过软阈值化将其置为0;或者通过注意力机制确定重要的特征,将其保留以加强神经网络从噪声信号中提取特征的能力。

图3 SENet模块Fig.3 SENet module

图4 残差模块中的SENet模块Fig.4 Senet module in the residual module
全连接层1起到降维的作用,采用ReLU激活,全连接层2可以恢复原始的维度,如图4所示。
Ftr:卷积操作,设卷积核为V=[v1,v2,…,vc],vc表示第c个卷积核,输出则为U=[u1,u2,…,uC]
X→U,X∈RW′×H′×C′,U∈RW×H×C
(3)
(4)
Fsq:挤压操作,通过全局平均池化将每个通道上的整个空间特征编码为全局特征,使c个通道最后变成1×1×c的实数序列
(5)
Fex:激励操作,采用sigmoid形式的gating机制,学习各个通道间的非线性关系
s=Fex(z,W)=σ(g(z,W))=σ(W2(W1z))
(6)
Fscale:将每个通道被sigmoid激活后的值(0~1)乘以U上原始特征
(7)
在SENet中,所嵌入的小型网络是用于获取一组权值系数;在深度残差收缩网络中,该小型网络则是用于获取一组阈值。
为了进一步对输入的汇流行星排振动信号进行降噪处理,以提升模型的分类效果,引入软阈值化[31]操作,并将其嵌入到改进后的残差块中。具体来说就是预先设置一个阈值,其取值大小对于降噪的结果有着直接的影响,它的用处是将绝对值低于阈值的特征值删掉,将其他的特征值向着零值的方向进行调整,也就是“收缩”。软阈值化的输入与输出之间的关系如下

(8)
式中:x为输入特征;y为输出特征;τ为阈值。通常阈值是一个不太大的正数。
软阈值化的导数公式如下
(9)
软阈值化的导数只有0和1两种情况,与ReLU激活函数性质相似,如图5所示。因此它具有防止“梯度消失”与“梯度爆炸”的功能。


图5 软阈值化及其导数图Fig.5 Soft thresholding and its derivative diagram
综上,本文使用的深度残差收缩网络结构如图6和图7所示。

图6 一维深度残差收缩网络模型结构图Fig.6 Structure diagram of one-dimensional deep residual shrinkage network model

图7 SENet模块结构图Fig.7 SENet module structure diagram
重要隐藏层的参数设置如表1和表2所示。其中,一维卷积层使用一维的卷积核和池化核,不需要对原始信号进行二维转换,可以减少信号预处理的工作量[32],大大提高了工作效率。

表1 卷积层参数设置Tab.1 Convolution layer parameter setting

表2 SENet参数设置Tab.2 SENet parameter setting
模型的输入维度设为6 000×1,卷积核的宽度增加到一定宽度时,特征提取效果不再增加,同时设置较大的卷积核更容易过滤噪声,因此本文将第一层卷积核的大小设置为64×1,滑动步长取1。
3 试验
3.1 数据集
新型装甲车辆综合传动装置汇流行星排故障模拟实验台,外接电动机、润滑油泵等主要设备。为模拟直驶工况,电动机连接输入轴1,即动力从定轴齿轮传递到齿圈,输入轴2锁死。电机额定功率110 kW,可提供转速范围为0~1 800 r/min。实验台如图8所示,各部件参数如表3所示。其传动结构如图9所示。

表3 汇流行星排主要构件基本设计参数Tab.3 Basic design parameters of main components of confluence planetary row

图8 汇流行星综合传动装置实验台Fig.8 Confluence planetary displacement diagram

图9 汇流行星排传动简图Fig.9 Confluence planetary integrated transmission test-bed
测试系统装置包括主控平台、32通道信号采集仪、振动传感器和相应的数据线。通过主控平台控制实验台的启停,改变转速及加载等操作,控制界面如图10所示。

图10 主控平台控制面板Fig.10 Main control platform control panel
在齿轮箱上布设5个测点点位置,如图11所示。选择测点5的数据为测试数据,设置工况为空载状态下转速为1 200 r/min,采样频率20 kHz。更换不同故障件采集四种状态的信号,分别是正常、单一行星轮齿根处长度约为30%裂纹、50%裂纹、80%裂纹四种状态。

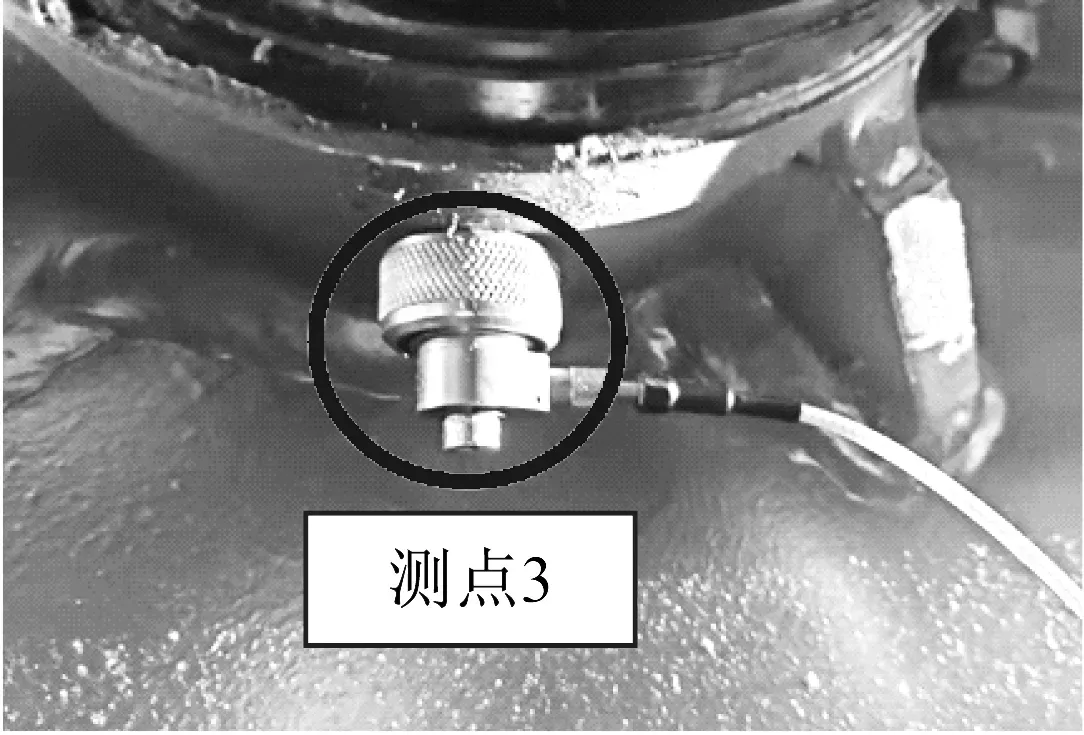

图11 传感器布点图Fig.11 Sensor layout diagram
样本数据取204 800个点,每2 048个点为一个样本,每种状态数据共100个样本。其时域信号和频域信号如图12所示。

(a) 正常状态行星轮

(b) 30%长度裂纹行星轮

(c) 50%长度裂纹行星轮

(d) 80%长度裂纹行星轮图12 四种不同工况时频图Fig.12 Time-frequency diagram of four different working conditions
通过图12可知,四种状态的时频图差距不大,难以通过数据采集系统直接对四种状态直接区分。
3.2 模型训练
将注意力机制与软阈值化融入到残差神经网络,不仅可减少模型参数的数量,同时还具有很强的“去噪”效果,本文通过1D_DRSN对汇流行星排正常与不同程度裂纹状态的分类,具体流程如图13所示。

图13 故障诊断流程图Fig.13 Fault diagnosis flowchart
主要步骤包括:
(1) 构建数据集。通过传感器采集振动信号,并且采用每2 048个点的截取一个样本方式,增加样本数量,每种数据共得到100个样本,如表4所示。将所有样本按照二八准则随机划分为训练集与测试集。

表4 故障描述Tab.4 Fault description
(2) 1D_DRSN网络模型训练。分别设置各层参数,取各个特征通道绝对值的平均值乘以0.01作为阈值,将大于阈值的值减去阈值,小于阈值的值归为0。根据故障类别设置分类器神经元个数,softmax分类器通过梯度下降算法对各个参数微调,直到达到最大训练轮次,完成网络参数训练。
(3) 1D_DRSN模型测试。训练完成,使用测试集评估模型最终的训练效果。
3.3 验证与分析
首先对本文提出改进模型的效果进行验证。分别设置网络参数相同的1DCNN,ResNet与1D_DRSN对比。采用同一测试集,分别对三种网络训练100次,网络训练参数设置如表5所示。三种网络的准确率变化如图14所示。从图14可知,1D_DRSN相较其他两种网络更快的达到高的准确率。

表5 网络参数Tab.5 Network parameters
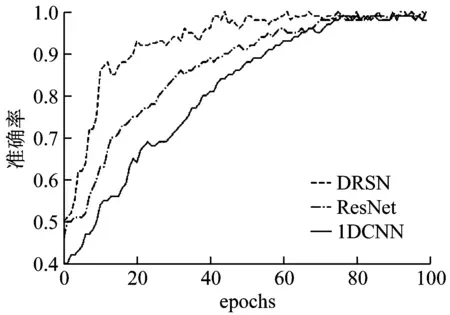
图14 三种网络验证集准确率对比图Fig.14 Comparison of accuracy rates of three network verification sets
通过对比分析1D_DRSN、1DCNN、ResNet三个模型的分类准确率达到90%以上所需轮次,如表6所示。1D_DRSN作为最新改进的卷积神经网络,可以更快的达到更高的准确率。

表6 不同模型分类准确率达90%以上所需轮次Tab.6 The number of rounds required for different models with a classification accuracy of more than 90%
1D_DRSN与ResNet均在50轮次内准确率稳定达到90%,将验证集带入到训练好的模型中进行故障分类可以得到1D_DRSN与ResNet的混淆矩阵,如图15所示。从图13可知,1D_DRSN仅在30%裂纹与50%裂纹分类出现极小错误,它的分类效果相对更好。

(a) ResNet 混淆矩阵

(b) 1D_DRSN混淆矩阵图15 混淆矩阵Fig.15 Confusion matrix
1D_DRSN与ResNet的主要区别在是否有注意力机制,为了验证注意力机制的提取特征能力,采用t-SNE可视化呈现,如图16所示。同样对验证集训练20轮次,对比是否采用注意力机制,可以发现,使用注意力机制的1D_DRSN取得更好的分类效果。

(a) 不使用注意力机制直接输出

(b) 采用注意力机制输出图16 t-SNE降维可视化Fig.16 Dimensionality reduction visualization
此外,为了验证本文所提深度学习模型分类算法的优越性,查阅相关较新一维信号处理算法,基于本文数据集训练MEWT-CNN[33]、SE-ResNeXt[34]、RNN、1D-CNN-LSTM[35]、GADF-CNN[36]模型进行对比试验。所有模型均采用Adam优化器,初始学习率设置为0.001,进行50轮次训练,结果如表7所示。

表7 不同方法的故障识别Tab.7 Fault identification with different methods
根据表7结果,本文所提出算法的F1调和值是最高的。1D_DRSN的正确率尽管不是最高,但是其召回率几乎达到100%,就本文研究对象而言,装甲车辆在战场发生故障带来的后果是及其严重的,所以召回率对于我们来说更有实际意义,所以为了保证召回率,可以容忍些许的正确率下降。
4 结 论
本文就装甲车辆汇流行星排实际工作状态中存在多个激振源,存在较多的噪声这一问题,同时考虑到将振动信号转换为频谱图增加工作量这一情况,综合1DCNN,ResNet和注意力机制的优点,构建了1D_DRSN直接对收集到的汇流行星排振动信号进行故障分类,在存在较多噪声的情况下,可以高效分类。试验结果表明,对比其他两种前期应用较多的深度学习模型,该模型在训练速度,准确率以及分类结果上,都具有明显的优势,为在工厂、装甲车辆等存在干扰多的环境下采集到的信号进行分类识别提供了一种新的参考方法。
