基于PSO-Elman的三峡升船机驱动电机故障诊断研究
2022-10-15朱汉华
易 爽,高 岚,朱汉华
(武汉理工大学 船海与能源动力工程学院,湖北 武汉 430063)
三峡工程是世界闻名的水利工程,而三峡升船机则是三峡永久通航设备中最重要的设备之一[1]。驱动电机作为三峡升船机的核心动力来源,其重要性不言而喻,一旦出现故障,升船机会失去动力来源,可能会造成严重的安全事故。因此,有必要对驱动电机进行故障诊断研究,从而保障三峡升船机运行的安全性。
三峡升船机驱动电机是功率为315 kW的1PQ8355-6PB80-Z系列西门子变频调速三相异步电动机,针对驱动电机进行故障研究就要了解异步电机的故障机理及诊断方式。现如今,许多学者针对异步电机故障诊断方法进行相关研究。其中,文献[2]提出一种基于小波包信息熵和小波神经网络的故障诊断方法;文献[3]提出了基于差分进化算法优化径向基函数(RBF)神经网络的故障诊断方法;文献[4]以定子电流为故障信号,利用集合经验模态分解(EEMD)能量熵构造故障特征向量,通过人工神经网络进行故障识别。
针对三峡升船机驱动电机,本文以驱动电机定子电流作为故障诊断信号,根据小波包分解得到的能量分布特征构建故障特征向量,通过PSO-Elman模型实现对驱动电机的故障诊断。
1 驱动电机建模与故障设置
驱动电机在实际运行过程中,由于工作环境恶劣、工况复杂,可能会导致转子断条故障的发生,而在通常情况下,转子断条故障都会引起气隙偏心故障的产生[5]。因此本文以三峡升船机驱动电机作为研究对象,针对电机匝间短路、转子断条、气隙偏心、转子断条和气隙偏心复合故障4种故障开展诊断研究。
由于三峡升船机机电设备运行数据的涉密性,本文利用ANSYS Maxwell仿真平台完成驱动电机的建模和故障设置,表1为三峡升船机驱动电机相关参数,三峡升船机驱动电机有限元模型示意图如图1所示。每种故障设置4种故障程度,其故障状态分别为:匝间短路2匝、4匝、6匝和8匝,转子断条1、3、5和7根,气隙偏心10%、20%、30%和40%。转子断条和气隙偏心复合故障按照故障程度分为轻度、中度、重度和严重,有限元模型的仿真时间设置为5 s,仿真步长设置为0.001 s,通过仿真分析计算获取驱动电机定子三相电流数据。
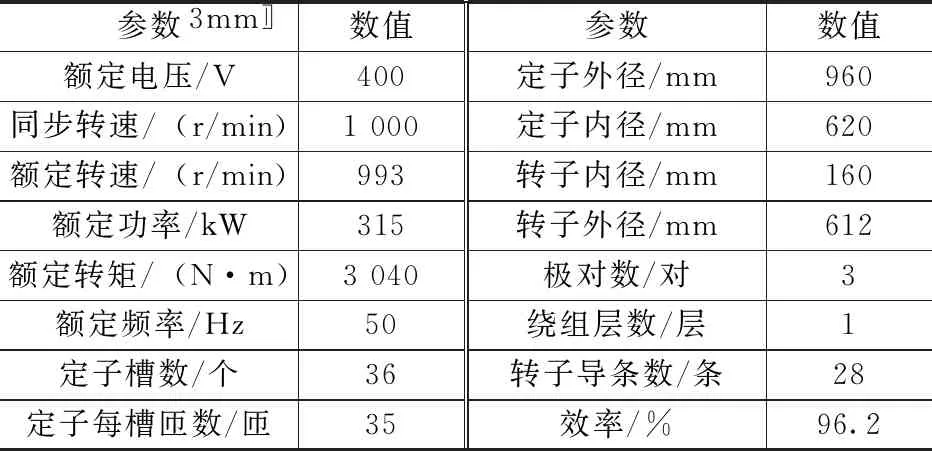
表1 三峡升船机驱动电机相关参数

2 基于小波包能量的故障信号特征提取
当驱动电机出现匝间短路、转子断条、气隙偏心故障时,定子电流中会产生特定的电流分量,直接利用FFT对定子电流信号进行频谱分析,该频率分量极有可能被电流基波分量或干扰信号所淹没,导致该频率分量难以被识别。而电机故障会导致故障信号的能量分布与正常信号相比有所不同,因此,本文利用小波包对驱动电机的定子电流信号进行分解重构,得到多个频段信号,每个频段对应着不同的能量值,利用能量值占比作为电机的故障特征向量。
令(j,i)为小波包分解后的第j层的第i个节点,其中i为从0到2j-1的整数,该节点的重构信号为Sji,节点能量可以表示为Eji,因此节点(j,i)的能量表达式为:
(1)
式中,N表示信号的长度;k表示整数。
小波包分解后第j层的总能量为Ej,则其表达式为:
(2)
第j层中第i个节点对应的频段能量值相对总能量的比例pji为:
(3)
通过式(3)得到的频段相对能量值作为故障诊断的特征向量,为下文的故障识别打下基础。
由于本文涉及的故障状态较多,以重度复合故障为例进行展示,以0.6 s作为一个采样周期,对一个周期的A相定子电流数据进行小波包三层分解,其中小波基选用db5小波,重度复合故障状态下小波包节点分解重构图如图2所示。由图2可知,定子电流信号经过三层小波包分解后,重构成为了8个节点信号,一般情况下,节点信号的频段相对能量值会因为故障而发生改变[6],驱动电机定子电流信号能量谱如图3所示。由图3可知,驱动电机不同故障状态下定子电流信号能量谱具有明显的不同,利用定子电流信号能量谱能有效地区分电机的故障状态。将得到的相对能量值组成一个象征故障类型的故障特征向量,按照能量占比每种状态对应一个八维特征向量。
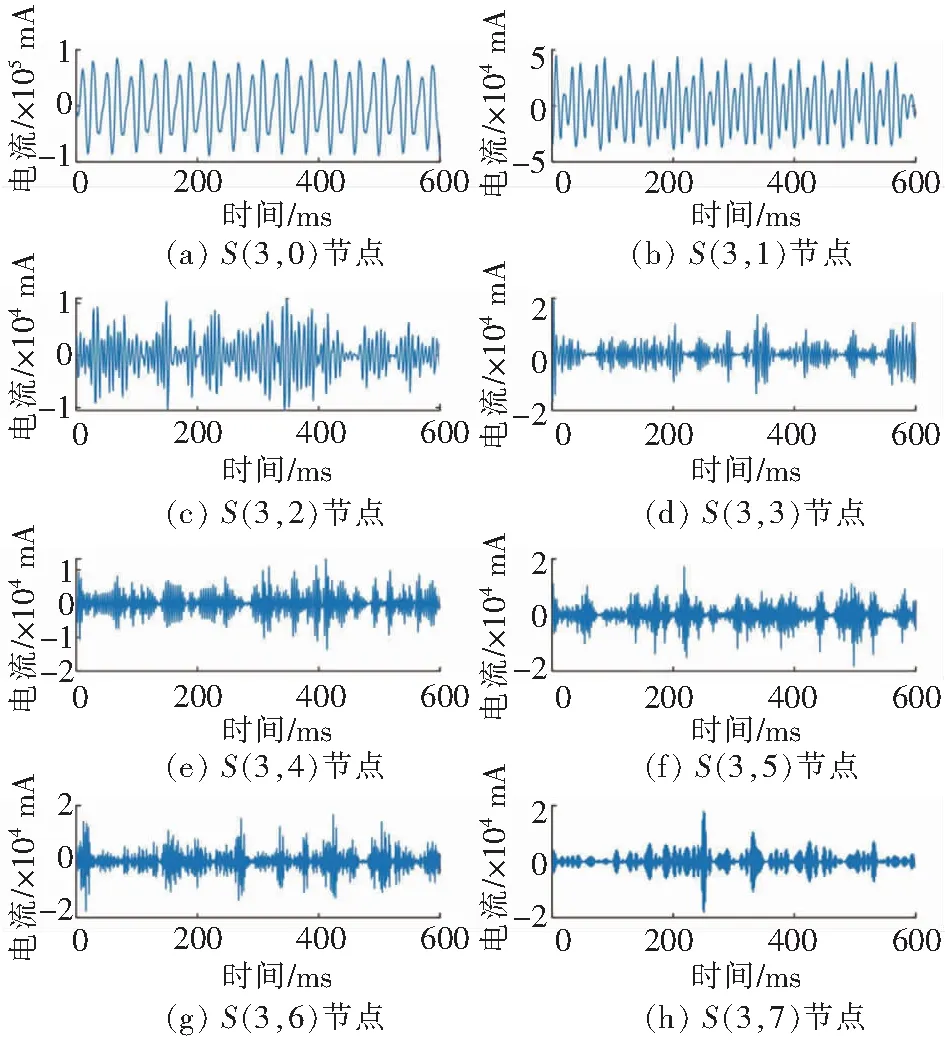
图2 重度复合故障状态下小波包节点分解重构图

图3 驱动电机定子电流信号能量谱
3 基于PSO-Elman模型的故障诊断
3.1 Elman神经网络
Elman神经网络是一种局部回归神经网络。其主要由输入层、隐含层、承接层和输出层组成,承接层可以起到承上启下的作用,它主要是用来记忆隐含层上一时刻的输出,相当于一个隐含层输出的临时储存器。Elman神经网络结构如图4所示。

图4 Elman神经网络结构
3.2 基于 PSO-Elman的故障诊断方案设计
粒子群算法(PSO)是近些年来发展起来的一种进化算法,其具有实现方便、收敛速度快、参数设置少等优点,因此被广泛用于日常实际问题的解决。
Elman神经网络采用的核心算法是BP算法,其劣势比较明显,网络收敛速度较慢并且易陷入局部极值,而利用PSO算法的全局寻优能力进行优化则能很好地解决这一缺点。因此,针对三峡升船机驱动电机,本文设计基于PSO-Elman的故障诊断方案。
基于PSO-Elman的驱动电机故障诊断方案流程图如图5所示。该设计方案主要包括4个部分:故障特征向量提取、Elman神经网络结构、PSO算法优化网络参数、网络故障分类。其基本步骤如下:①将驱动电机的故障特征向量进行编码,确定故障诊断数据集的输入和输出样本;②根据数据集样本,确定Elman神经网络基本结构;③根据网络结构初始化PSO算法粒子参数;④将Elman神经网络训练误差的绝对值作为个体适应度值,在适应度值的迭代中选取最优的个体极值和全局极值;⑤当迭代次数达到设定值或者目标精度,就停止PSO寻优;⑥将寻优得到的全局极值对应权值和阈值作为Elman神经网络的参数设定值;⑦利用PSO算法优化后的神经网络完成驱动电机的故障分类。

图5 基于PSO-Elman的驱动电机故障诊断方案流程图
4 故障诊断结果分析
将驱动电机正常和故障状态下的定子电流信号,按照“基于小波包能量的故障信号特征提取”方法提取驱动电机故障特征向量,构成850组八维向量。针对驱动电机的17种状态,利用一维向量进行编码,作为Elman神经网络的输出,按照表2 的电机状态次序从1至17依次编码。将故障特征向量和编码组成数据样本集,选取60%的数据样本作为训练集,40%的数据样本作为测试集。
本文中Elman神经网络的输入向量为八维,输出向量为一维,因此设置其输入层节点个数为8,隐含层节点个数为11,输出层节点个数为1。设定PSO算法的粒子群体规模为20,微粒长度为110,最大迭代次数为200,目标精度为0.001,学习因子c1=c2=1.5,惯性权重ω=0.95,粒子的运动速度vmax=0.9、vmin=0.5。
本文利用PSO算法优化Elman神经网络, PSO-Elman模型迭代误差变化曲线图如图6所示。由图6可知,PSO算法优化Elman神经网络模型效果明显,网络模型收敛速度较快且没有陷入局部最小值的问题,在第31次迭代后,迭代的误差率降至0.01以下,在40次迭代后趋于平缓,当迭代次数达到52次时达到目标精度0.001,随即PSO寻优过程停止。总体来说,该模型的预测精度较高。

图6 PSO-Elman模型迭代误差变化曲线图
针对三峡升船机驱动电机的匝间短路、转子断条、气隙偏心和复合故障等多种故障状态,利用PSO-Elman模型完成故障分类,表2为PSO-Elman模型故障诊断结果。其中,对于转子断条故障的故障分类效果最好,故障诊断准确率接近100%,PSO-Elman模型总的故障诊断准确率达到95.29%。
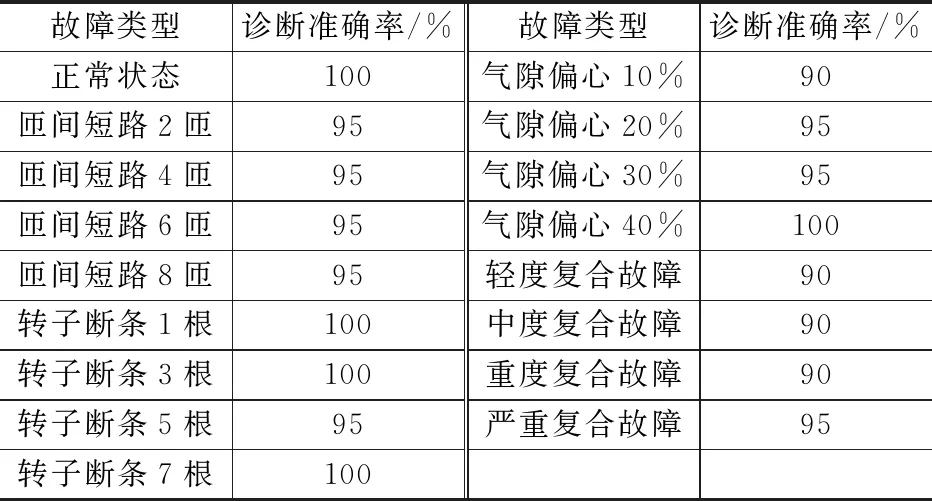
表2 PSO-Elman模型故障诊断结果
5 结束语
为了保障三峡升船机驱动电机的可靠运行,本文针对驱动电机的4种故障类型共16种故障状态进行研究,利用小波包分解提取了故障特征向量,相较于FFT对故障信号处理不佳,小波包保障了故障特征向量提取的准确性。利用PSO算法优化Elman神经网络模型完成了故障诊断,通过仿真试验证明了PSO-Elman模型能实现对三峡升船机驱动电机的故障分类,该方法具有可靠性和有效性。因此,将该模型应用于三峡升船机驱动电机的运行状态监测是可行的。