NX虚拟机床仿真在车铣复合机床中的应用
2022-10-14毕忠梁李陶胜王伟
毕忠梁,李陶胜,王伟
安庆职业技术学院机电工程学院,安徽安庆,246003
0 引言
随着虚拟仿真技术的不断发展和应用,虚拟机床仿真技术应用在高档数控机床上越来越普遍。虚拟机床仿真的目标是模拟实际的加工环境和条件,并对加工过程进行全面的监测。这样可以提前预知机床的运动碰撞、干涉等问题和相关警报,防止加工产品报废、刀具折断、机床被撞击,危及操作者的生命安全[1],虚拟机床仿真还能对机床的加工能力、加工过程的合理性、加工精度等进行评价,为加工提供参考数据,从而优化加工过程。
越高端的数控机床对虚拟仿真的要求越高,因为高端的数控机床普遍包含多轴、多通道、多刀具、多工位、多部件,这就要求虚拟仿真的精确度要高,要能真实仿真机床所有的运动细节,除了仿真刀具路径外,还应包括换刀、夹具的加紧松开、切削进给加速度,切削力等的仿真,此外高度数控机床控制器大多深度定制,很多特殊指令的指令代码和功能也需要仿真。目前针对复制高端数控机床的虚拟仿真应用不多,文章以津上M06SD双主轴单通道四动力头车铣复合数控机床为例,应用NX软件的CSE功能对车铣复合加工的整个操作流程进行了虚拟仿真加工。
1 NX的CSE仿真概述
对于CAM软件而言,机床虚拟仿真通常包括两大类:一种是纯刀具路径的仿真,另一种是直接带机床运动的仿真。刀具路径仿真往往只能验证CAM软件生成的刀具路径轨迹是否正确,切削时是否有过切或者干涉的情况;而机床虚拟仿真包含机床、刀具和夹具等,可以预测加工过程中的碰撞。带机床运动的虚拟仿真又分成两种:一种是基于刀具路径轨迹的机床虚拟仿真,另一种是基于G代码的机床虚拟仿真[2]。前者仿真时只参考CAM软件生成的刀路轨迹,基于刀具路径验证与模拟,无法验证G代码的正确性;而后者同真实的CNC控制系统一样,集成虚拟加工环境,直接读取G代码并执行仿真动作,显然更接近实际情况,仿真更加精准。
N X软件的C A M部分,包含了一整套集成仿真与验证系统(integrated simulation and verification,以下简称ISV仿真),通过图1可以看到,NX的ISV仿真可以直接仿真后处理生成的G代码,包含了两种仿真驱动模式,一种是通用仿真引擎(CSE)驱动,另一种是虚拟 CNC 控制器(VNCK)驱动,VNCK界面与真实的数控机床操作面板完全一致,仿真效果更强大,但是目前只针对Sinumerik 840D系统才能运行,由于津上M06SD-II采用的是FANUC系统,因此这里采用通用仿真引擎(CSE)驱动。置文件MCF(machine configuration file),用于定义机床几何特性、轴配置、通道配置、机器驱动参数等的二进制/加密XML文件。④子程序,包含至少1个换刀循环文件,可附加钻孔循环、车削循环、用户自定义其他子程序等。NX软件自带了CSE 支持的3种主要控制器类型(Fanuc、Sinumerik S840D、Heidenhain TNC)的DLL、CCF和MCF文件,以及各种类型的包含运动学的机床模型,基本可以实现通用型机床的OOTB。但是针对一些高端复杂的数控机床,还是需要定制和深度开发才可以使用。
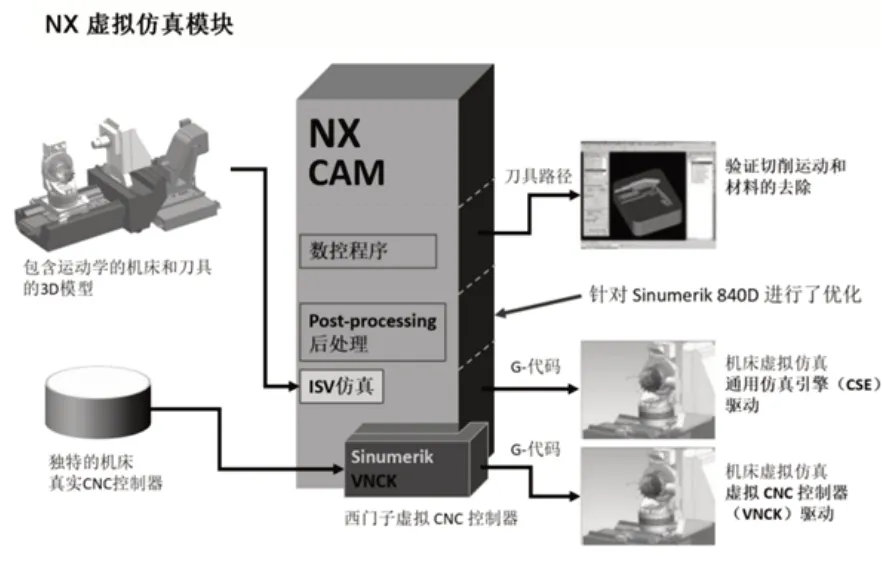
图1 NX集成仿真与验证系统
2 机床运动学定义
CSE(common simulation engine)是一个虚拟控制器仿真引擎,支持许多常见的数控系统,例如:西门子840D+840C、发那科系列、海德汉TNC等,采用G代码(后处理直接生成、手动创建或者外部导入G代码)直接驱动虚拟机床,CSE自带后处理器可以在仿真前自动将刀轨数据转换为NC代码。它可以像真正的机床操作系统一样编译读取G代码仿真。通过CSEDriver驱动程序中设置的机器运动学,为每个轴设置硬限位和软限位、最大速度、最大加速度、最大减速度、加加速度和KV系数等。CSE有4个主要组成部分:①控制器编译文件DLL,它可以编译特定控制器的代码(例如发那科G10、西门子CYCLE等)。②控制器配置文件CCF(controller configuration files)一个二进制/加密的XML文件,它定义了为有效语句执行的操作。③机床配
2.1 建立机床模型
首先需要根据机床的结构,通过测量真实部件的尺寸对数控机床进行几何建模,该机床型号为津上M06SD(图2),具有双主轴结构,配备了四个轴向和径向铣削动力头,在车钻镗削的基础上,也可进行铣削加工,实现车铣复合加工,主轴和背轴均配有C轴功能,采用电主轴可实现对接加工,无需二次装夹,配备热位移校正功能,可长时间稳定加工。具体参数如表1所示。

图2 津上M06SD双主轴车铣复合机床

表1 津上M06SD机床参数
利用UG NX CAD模块将M06SD机床的各个运动部件依据结构特点分别建模,如床身、刀塔、主轴背轴、卡盘和钣金等,需要保证机床各个部件尺寸1:1还原。然后将各个部件按照机床在静止状态下的初始模式进行装配,需要注意作为机床运动学的机床组件一定要是独立的部件。如图3所示,为建好的机床模型。
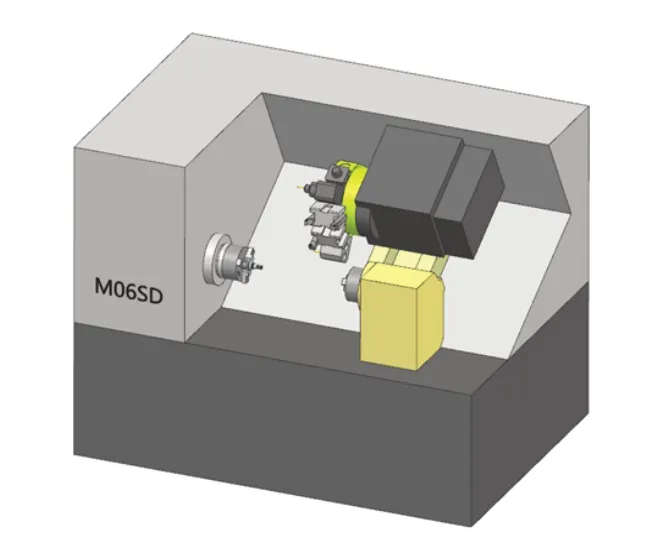
图3 NX建立的M06SD机床实体模型
2.2 定义机床运动学
首先,开启NX的Machine Tool Builder机床构造器,定义机床的运动学模型,在机床构造器导航器的最顶层节点处添加新机床,并将其命名为“M06SD”。基本上,机床运动学定义过程可以分为4个步骤。
(1)建立机床运动学组件。在运动学模型中的组件是代表机械特征的刚体。每台机床包含各个组件的联结,这些组件建立了父子关系,并且以关系树的形式存在。可以通过选择多个装配组件来定义单个组件来创建简化的运动模型以便设置轴运动。更复杂的运动学模型可以通过部件分类来创建,可以在检查碰撞干扰时根据类别来进行检查。组件建立的方法以床体基座为例进行设置:在机床名称“M06SD”鼠标右键选择“插入”——“机床组件”,在弹出的对话框中设置名称为“_MACHINE_BASE”,选择几何体为机床模型中的床身,联结名称为 “MACHINE_ZERO*”,设置坐标系为机床零点坐标,设置在卡盘的左端面的中心处,最后确认即完成组件建立。使用同样的方法设置机床其他运动组件,在机床关系树中确定父子关系及分类。其余机床组件设定如表2所示。
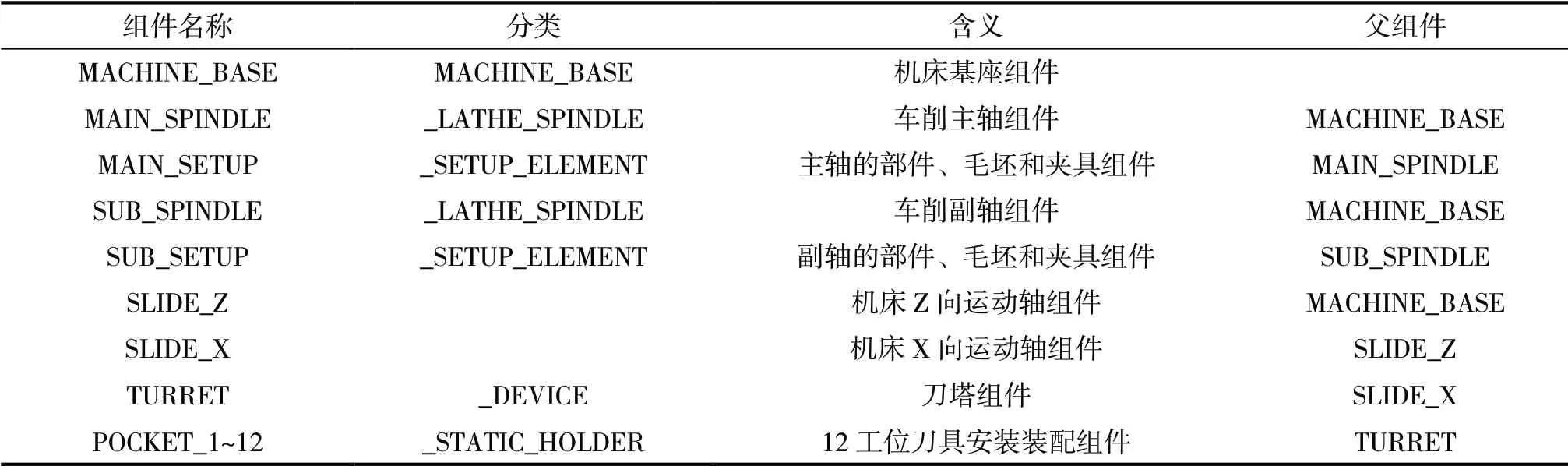
表2 M06SD机床运动学组件
(2)建立机床运动学联结点。机床运动学联结点是一个分类和命名的坐标系(CSYS),它是相对于机床模型零件的绝对坐标系定义的。每个连接点都与一个机床组件相关联[3]。当创建机床组件时,NX会自动为该组件分配一个默认连接,我们也可以根据需要调整联结点位置。NX使用运动学联结点有以下作用:可以在CAM中自动安装部件,要正确安装零件,SETUP组件的联结点必须与计划安装的零件的方向相同;在CAM中自动安装工具或其他机床附件如动力头等;可以用来定义NC 轴的方向;可以用于变换坐标系等。该机床需要建立的运动学联结点主要有以下几个:机床零点MACHINE_ZERO*、主轴车削旋转中心工作平面MAIN_SPINDLE_CSYS、背轴车削旋转中心工作平面SUB_SPINDLE_CSYS、主轴零件安装自动装配联结点MAIN_MOUNT_JCT、主轴零件安装自动装配联结点SUB_MOUNT_JCT、刀塔旋转中心联结点TURRET_ROT,以及12个刀具安装工位的联结点TOOL_MOUNT_JCT。
(3)建立机床运动轴。要将机床运动分配给机床组件,必须为该组件定义一个运动轴,然后沿着或围绕该轴进行运动。如果一个机床组件移动,那么在机床结构树中它下面的所有子组件也会跟随父组件一起移动。创建机床运动轴,需要包含以下几点:①轴名称:每个轴都必须定义自己的轴名称,一旦确定轴名称,则所有CSE功能/命令都使用此名称。②轴联结点名称:即轴引用的联结点,所有轴都必须参考一个联结点,也可以共享轴联结点。③轴方向:表示轴的连接方向(X、Y 或 Z),影响组件的运动行为。④轴的运动类型:包含旋转轴或线性轴。⑤轴号:轴号必须唯一且不能重复。⑥轴运动的上限和下限:表示机床轴运动的极限位置,参考机床坐标系下的坐标。
以Z轴建立为例,如图4所示:右键点击Z-S L IDE插入轴,输入轴名称Z,联接名称MACHINE_BASE@MACHINE_ZERO,方向为Z+,定义该轴类型为线性直线轴,轴编号为3,初始值441mm,上限541mm,下限141mm[4]。类似方法建立其他运动轴,津上M06SD一共包含7个轴,分别是线性移动轴X、线性移动轴Z、主轴车削旋转轴CM、背轴车削旋转轴CB、背轴线性移动轴A、刀塔旋转轴T和动力刀头旋转轴S。

图4 机床运动轴设置
(4)定义机床运动链及配置通道。设置完运动轴之后,还需要指定轴所在的通道。设定方法:在机床导航器中,右键单击机床名称“M06SD”——选择“通道配置”,M06SD为单通道双主轴机床,设置通道Main为Channel 1包括以下轴,由一个 NC 程序驱动:轴 X、Z、A、CM(主轴)、CB(背轴)、T、S,NX能够自动识别运动学模型中存在的所有轴,无论它们是线性轴、旋转轴还是主轴。单击确定以保存设置。最后设置运动链,代表组合的链用于机床的逆运动,NX系统提供预先配置的轴组合作为“默认链”。对于复杂的机床,必须检查配置的运动链或对其进行调整。每条运动链最多可以包含3个线性轴和2个旋转轴。M06SD由于是双主轴机床,因此包含两条运动链,主轴和背轴各包含一个运动链。最终机床运动仿真关系如5图所示。

图5 M06SD机床运动学关系图
(5)将机床添加到机床数据库。将机床添加到机床数据库文件中,该文件名为machine_database.dat,位置在…Program FilesUGSNX1980MACH esourcelibrarymachineascii machine_database.dat。把建好的机床模型文件放在以graphics 命名的文件夹里,替换到UG安装目录下的 SiemensNX1980MACH esourcelibrarymachineinstalled_machinesM06SDgraphics里[5]。
3 虚拟机床仿真加工验证
打开已经建好的CAM文件,该零件已经定义了一些操作和刀具,以便可以生成了刀具路径。进入加工模块里,加载后切换到操作导航器——机床视图。将在最顶层节点找到“NULL_MACHINE”或“GENERIC_MACHINE”,将先前定义好的机床分配给实际的CAM零件。双击最上面的(机床)节点,单击从库中检索机器按钮以获取可用机器的列表,从库中检索车铣复合机床MILL-TURN,找到之前建立的M06SD机床并打开。选择零件放置定位使用部件安装联接,将零件安装到主轴的三爪卡盘上,确定后系统加载对应的机床并将其与CAM部件成功连接,接下来就可以选择刀具路径运行机床仿真,如图6所示。

图6 虚拟机床仿真加工验证
4 结语
本文使用NX CSE虚拟机床仿真技术,创建了M06SD车铣复合数控机床的运动学模型,利用CSE建立了机床模拟和切削验证,为数控机床虚拟模型仿真提供了技术支撑。CSE虚拟机床仿真是基于G代码的机床虚拟仿真。其他的一些CAM软件只是基于刀具路径仿真,无法验证G代码的正确性;而CSE虚拟机床仿真技术同真实的CNC控制系统一样,集成虚拟加工环境,直接读取仿真G代码,仿真更真实、直观,更接近实际加工情况[6]。仿真后的G代码可直接输入数控系统进行加工,提高了数控加工质量,确保了数据的准确性和可用性,优化了数控加工时间,消除了事故的发生。
