基于数字影像的直升机旋翼桨尖运动测量
2022-10-14廖会生李新民陈垚锋黄建萍熊邦书
廖会生,李新民,陈垚锋,黄建萍,熊邦书
(1.中国直升机设计研究所,江西 景德镇 333001;2. 南昌航空大学 图像处理与模式识别江西省重点实验室,江西 南昌 330063)
0 引言
直升机在飞行时,旋翼工作在复杂的气动环境中。特别是在直升机前飞时,旋翼桨叶所承受的载荷及运动都比较复杂,影响的因数很多,造成了旋翼桨尖运动轨迹的复杂性,如图 1所示。受各片桨叶的安装角和扭转变形不相同的影响,旋翼各片桨叶受的气动力不一样,导致各片桨叶的桨尖运动轨迹不在同一高度,即锥度角不相等。这种不平衡的气动力直接导致旋翼振动增大,影响直升机的安全性、舒适性和可靠性。
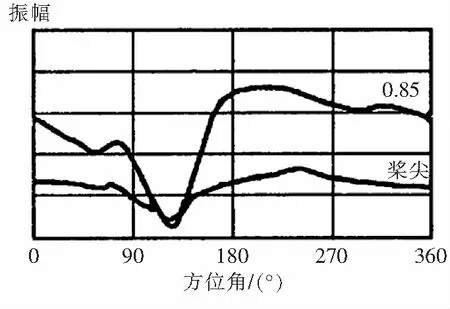
图1 桨叶运动轨迹变化情况
国内外对旋翼桨尖运动轨迹测量的研究开展较早。早期采用标杆法,需要多人操作,有很大的安全性隐患,不能进行多个飞行状态的测试(只能进行地面悬停),涉及锥体的调整需要有专业知识的工程师;还有采用频闪仪法,但是只能获得桨尖的大致位置,不能给出精确的高度差,涉及锥体的调整需要有专业知识的工程师。针对传统测量中存在的有安全隐患、精度差、专业性太强等问题,本文提出一种基于数字影像的非接触式旋翼桨尖运动监测方法,该方法是一种省时、省力且高精度的测量方法,能实现桨尖运动的精确测量。
1 原理
1.1 基本原理
基于数字影像的直升机旋翼桨尖运动轨迹(BTD)测量是采用高速相机对贴有反光材料的旋翼桨尖的运动进行图像采集,然后对采集的图像进行计算处理获得桨尖位置偏移量的技术。测量系统如图2所示,计算机视觉模块选用UI-3130CP Rev. 2型号高速工业相机(分辨率800×600,帧率为575.0 fps,像元尺寸为4.80 μm×4.80 μm),用于桨尖图像数据的采集。触发控制模块是一个角度传感器和倍频同步器,每次桨尖运动扫过角度传感器产生一个TTL信号,信号经倍频同步转换器倍频处理,然后触发相机进行实时采集。照明模块的高频摄影灯用于水平照射桨尖,使相机在低曝光条件下拍到清晰的桨尖图像。
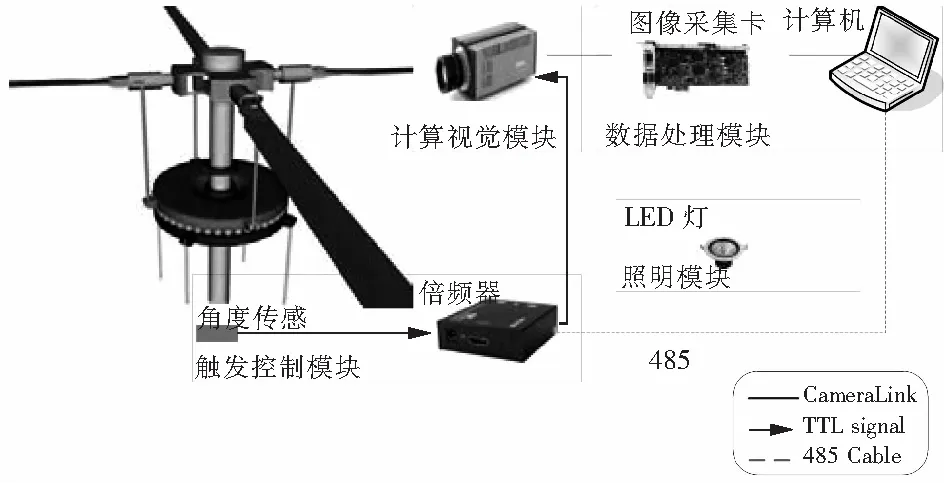
图2 BTD测量系统
桨尖偏移测量是通过在桨叶某一方位(如900)桨尖正方向安装一台摄像机,在旋翼运动过程中,拍摄每片桨叶通过此方位时的桨尖图像,采用图像处理方法获取每张桨叶图像中桨叶的中心点坐标,进而计算不同桨叶桨尖中心点的偏移量。桨尖偏移测量方法的流程图如图3所示。
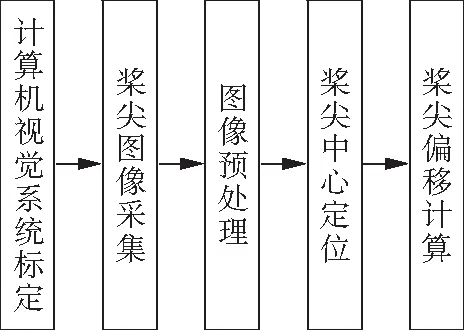
图3 桨尖偏移测量方法流程图
1.2 标定
本文研究中采用基于棋盘格的测量标定方法完成桨尖运动图像标定。这种测量标定方法采用常用的棋盘格作为标定板,如图4所示,棋盘格中每个黑色正方形区域的实际尺寸已知,其摆放方式与基于标准块的测量标定相同。
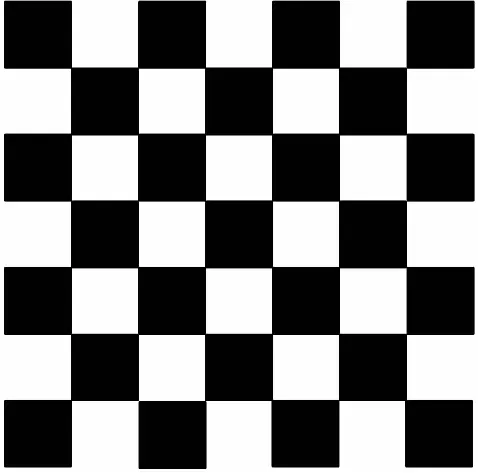
图4 棋盘格标定板
采集棋盘格标定图像后,通过对标准块图像进行中值滤波,去除一定的噪声干扰;采用最小化误差的迭代方法检测亚像素角点;最终假设棋盘格检测出×个的棋盘格角点,则有(-1)×(-1)个棋盘方格被检测出来,包含(2++)条边长,邻近的两个棋盘格角点间的像素距离,即为方格边长的像素距离,而棋盘格方格尺寸已知,从而可以获得单位像素所代表的实际长度,完成视觉测量系统的标定。计算公式如下:
(1)
式中,为两个相邻棋盘格角点间的像素距离。
1.3 桨尖运动轨迹计算方法
桨叶运动轨迹计算方法包括如下三大步骤:桨叶编码自动识别,桨尖气动中心定位,桨尖高度差计算。
1.3.1 桨尖编码自动识别
利用图像处理方法在旋翼高速旋转状态下自动识别桨叶的二进制编码。预先按照如图5中标注的比例将涂有哑光漆的矩形标记粘贴在各旋翼桨尖端面处,进行桨尖编码;然后利用桨尖灰度图像信息,并根据桨尖上矩形标记在水平方向上与桨尖长度的比例关系,通过统计矩形标记区域满足设定灰度级的像素点的个数来判定是否有涂黑矩形,进而达到区分各桨尖二进制编码的目的。
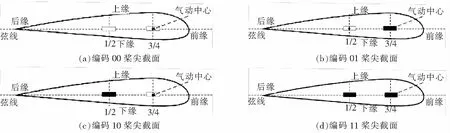
图5 桨尖编码示意图
1.3.2 桨尖气动中心定位
首先利用大津法将桨尖图像进行二值化。然后将图像区域内的轮廓按照大小进行排序,选取轮廓半径满足设定值的区域并提取该轮廓两端点坐标,然后进行桨尖区域画圆。具体识别图像如图6中(a)、(b)。最后通过桨尖气动中心点与桨尖长度的比例关系得出桨尖气动中心点的像素坐标。
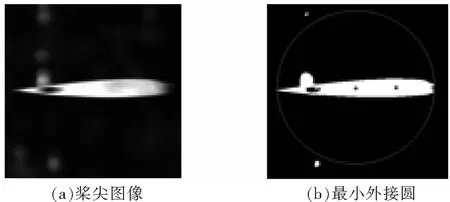
图6 桨尖定位过程示意图
1.3.3 桨尖高度差计算
结合相机标定结果和桨尖气动中心定位中得到的气动中心像素坐标信息,可计算得到桨尖偏移距离。
设试验操纵参数时,桨叶桨尖气动中心不同时刻高度的像素坐标为(表示运动状态不同时刻,表示桨叶的编号);令0(0表示静止状态时,表示桨叶的编号)表示旋翼桨尖气动中心在静止状态下高度的像素坐标,则在操纵参数下,旋翼桨尖不同时刻相对静止位置偏移量分别为Δ,计算如公式(2)。
Δ=(0-)
(2)
2 试验步骤
将相机正对桨尖架于距直升机桨尖1 m左右位置,同时将高频摄影灯正对桨尖端面打光,然后进行运动桨尖实时抓拍,试验系统如图7。

图7 试验系统搭建
采用棋盘格测量标定法获得直升机旋翼桨尖图像静态标定结果,如表1所示。获得静态标定结果后进行旋翼旋转状态下桨尖运动动态测量,试验状态为:旋翼转速600 rpm,试验总距0~9°,共9个试验状态。
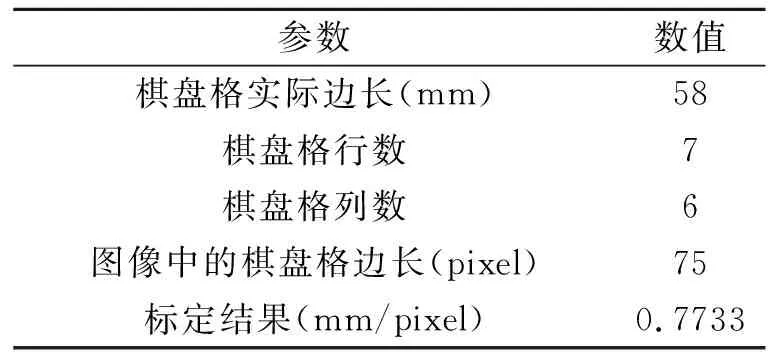
表1 标定结果
3 试验结果分析
直升机旋翼桨叶运动是挥摆扭耦合的结果,故在进行旋翼桨尖运动分析过程中,将桨叶偏移量分解为挥舞、摆振、扭转三个量进行分析,其计算方式都一样。获得的初始标定值和实测值代入公式(2)中,获得挥舞、摆振、扭转偏移量结果。
1)桨尖挥舞量随总距变化趋势
图8所示为编码10的桨叶桨尖挥舞量。从图中可以看出,随着总距的增大,桨叶产生的升力越大,桨叶挥舞量越大,整体挥舞量随总距的变化趋势基本符合理论分析。
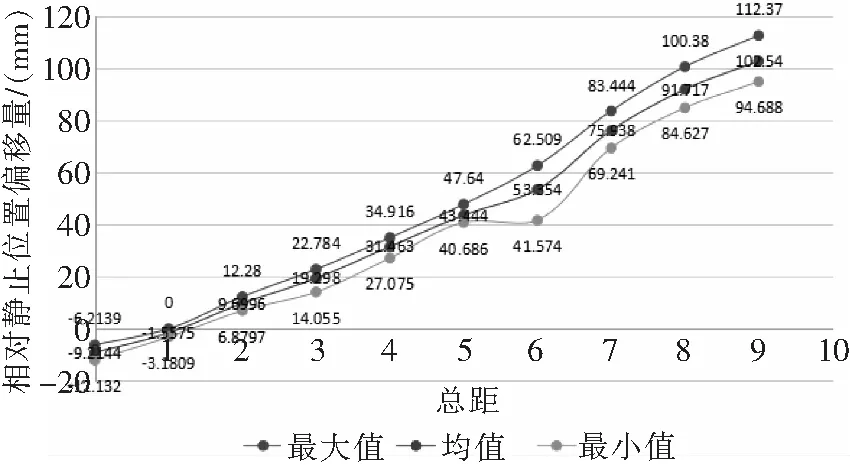
图8 编码10号桨尖挥舞量
通过对四片桨叶挥舞量取平均,进行对比分析,获得如图9所示的四片桨叶挥舞量均值对比。从图中可以看出,四片桨叶挥舞量的随总距变化的趋势基本一致。
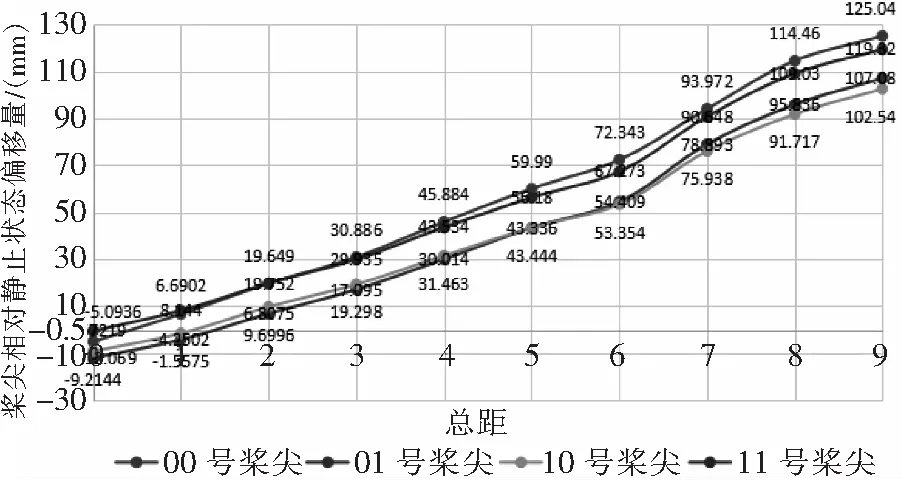
图9 四片桨尖挥舞量均值对比
2)桨尖摆振量随总距变化趋势
图10所示为编码为00号的桨叶桨尖摆振量。从图中可以看出,随总距的增大,桨叶摆振量也变大。由于桨叶摆振刚度比挥舞刚度大,摆振量随总距的变化趋势比挥舞量小。
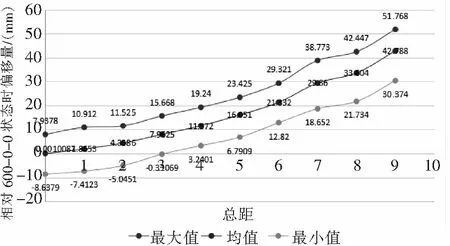
图10 编码00号桨尖摆振量
图11对四片桨尖摆振量均值进行了对比分析,摆振量均值变化趋势基本一致,低总距时摆振量变化趋势一致性较好。
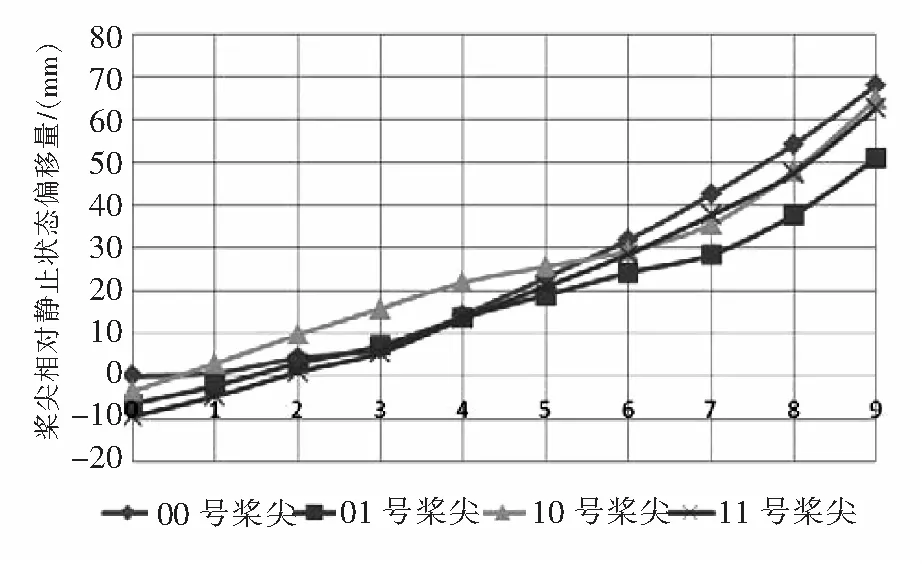
图11 四片桨尖摆振量均值对比
3)桨尖扭转量随总距变化趋势
图12为编码00号的桨尖扭转量。从图中可以看出,扭转量随总距的增大而增大,整体基本呈线性变化。
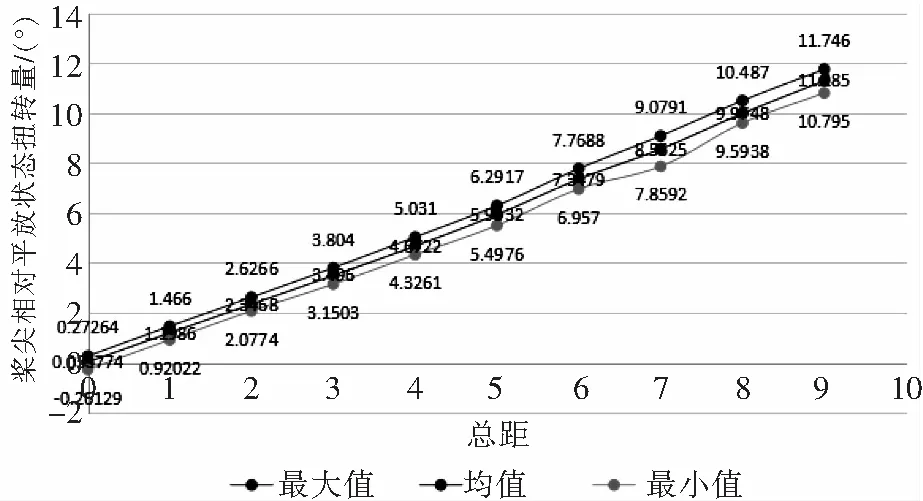
图12 编码00号桨尖扭转量
图13为四片桨尖扭转量均值对比。从图中可以看出,扭转量变化趋势基本一致,并且00号与11号较为一致,01号与10号基本一致。
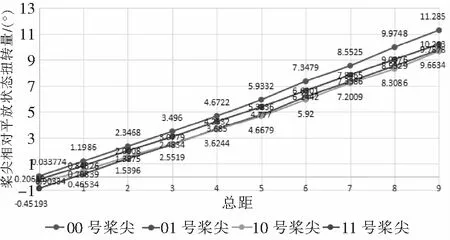
图13 四片桨尖扭转量均值对比
综合上述分析,桨尖挥摆扭运动基本与总距变化一致,但是由于每片桨叶物理特性存在差异,各片桨尖运动存在波动。通过四片桨尖挥舞量和扭转量均值的对比分析可知,00号与11号变化趋势较为一致,01号与10号变化一致性较好,说明00号与11号桨叶物理特性较为一致,01号与10号物理特性较为一致。
4 结论
提出了一种基于数字影像的直升机旋翼桨尖运动参数测量方法。该方法采用数字图像处理技术,克服了现有旋翼桨叶桨尖运动测量方法的不足;另外,使用编码标记点有效解决了桨尖特征不明显的问题,提高了特征识别与匹配的效率和精度。对模型旋翼桨尖进行了多次测量试验,结果表明该方法具有动态测量、非接触式、操作简单、危险性小和精度高的优点,可为直升机旋翼桨叶的日常维护提供一种新的技术手段。
