基于多信息融合和卷积神经网络的行星齿轮箱故障诊断
2022-10-12史志远滕虎马驰
史志远,滕虎,马驰
(1. 安标国家矿用产品安全标志中心有限公司,北京 100013;2. 中国矿业大学 机电工程学院,江苏 徐州 221008)
0 引言
行星齿轮箱作为重要的传动部件,以其承载能力强、速比大、运行平稳等特点,被广泛运用于大型煤矿机械设备中[1]。由于其经常在高速重载工况下运行,运行环境恶劣、运行时间长,太阳轮、行星轮、内齿圈和轴承等行星齿轮箱关键部位若发生断齿、磨损、裂纹等故障,将导致整个传动系统停机,造成巨大的经济损失并带来安全隐患。因此,准确诊断行星齿轮箱故障,对于保障煤矿机械设备健康运行具有重要意义[2]。
早期主要依靠工人和专家的经验来判断行星齿轮箱运行状态,随着技术发展,逐渐形成了以振动信号为主,油液、铁谱和红外分析为辅的故障诊断模式[3-5]。针对振动信号的分析方法从原来的单一分析方法发展为时域、频域和时频域的综合分析方法[6-7]。近年来,随着机器学习在各领域的运用,基于机器学习的行星齿轮箱故障诊断方法得到广泛研究。文献[8]从齿轮箱振动信号中提取有效值、啮合频率幅值、频率重心和差分能量信号,并输入到自适应神经模糊推理系统中进行训练,从而实现对行星齿轮箱故障的有效识别。文献[9]提出了一种基于Elman神经网络的齿轮箱故障诊断模型,选取4个时域动态特征参量和3个频域动态特征参量作为模型输入、故障类型作为模型输出,利用改进遗传算法对Elman神经网络进行优化,提升了齿轮箱故障诊断准确率。文献[10]提出了一种利用遗传算法和蚁群算法优化的BP神经网络,能够对行星齿轮箱进行快速、准确诊断。
上述诊断方法均依赖人工选择特征向量,而特征向量选择的优劣很大程度上决定了诊断方法的准确率。卷积神经网络(Convolutional Neural Networks,CNN)作为目前深度学习的代表算法之一,能通过卷积运算自动提取特征,其非线性特征提取能力强。文献[11]设计了一维CNN结构,并与Softmax分类器相结合,构建了一种行星齿轮箱智能诊断架构,将一维振动信号直接输入网络就能输出诊断结果。文献[12]对行星齿轮箱振动信号进行经验模态分解后,利用深度CNN对本征模态函数分量进行融合并自动提取特征,实现了行星齿轮箱故障诊断的自动化。
以上研究是将单个振动信号作为输入数据,然而行星齿轮箱发生故障时往往表现出多种征兆,单个振动信号无法体现完整的故障特征,造成故障诊断准确率低。因此,本文提出了一种基于多信息融合和CNN的行星齿轮箱故障诊断方法。将三向(水平径向、垂直径向与轴向)振动信号和声音信号进行多信息融合,从而获得二维信号;将二维信号输入CNN进行特征提取及分类,实现故障精确诊断。
1 基本理论
1.1 多信息融合
多信息融合是对多个信息源采集到的信息进行综合分析处理,从而获得比单一信息更精确、更有价值的结论。多信息融合要求所采集的信号具有关联性,且是同步采集的。多信息融合方式主要有数据层融合、特征层融合及决策层融合[13]。
(1) 数据层融合是将多个信息源采集的信息直接进行融合。其优点是数据蕴含的信息丰富、精度高;缺点是计算量大,且数据需要进行预处理。
(2) 特征层融合属于中间层次的融合,它是对原始信息进行故障特征提取后,将所提取的特征进行融合后再进行综合分析处理。其优点是实现了数据压缩,计算量较小;缺点是相比于数据层融合损失了部分有用信息,导致精度下降。
(3) 决策层融合属于高层次的融合,先根据每个信号作出决策,再将这些决策融合成最终的推理和决策。其优点是具有很高的灵活性,抗干扰能力强,对传感器的依赖小;缺点是相比于数据层融合和特征层融合,损失的数据最多,导致精度最低。
由于数据层融合获得的信息最丰富、精度最高,且本文中信息源共4个,所需计算量不算太大,所以本文采用数据层融合。
1.2 CNN
一般情况下,CNN由卷积层、池化层和全连接层等组成[14]。
(1) 卷积层是CNN的核心,其功能是对数据进行特征提取,一般由多个卷积核组成。每个卷积核与上一层特征图的局部区域相互连接,这部分区域即为卷积核在上一层的感受野,卷积核通过卷积操作能够得到新的特征图。特征图的计算一般分为2步:先通过卷积核对上一层数据进行卷积运算,之后对每个运算结果施加非线性函数。通常卷积层的形式为
式中:为第l层输出的第j个特征量;f(·)为激励函数;k为特征量个数;为第l-1层 输出的第i个特征量;*为卷积运算符号;为第l层输出的第j个卷积核的权重矩阵;为第l层输出的第j个卷积核的偏置矩阵。
(2) 池化层一般位于卷积层后面,主要负责对卷积后的数据进行信息过滤和特征选择,可减少网络计算量和控制过拟合。池化层主要分为2种类型:最大池化层,即在池化窗口中找到矩阵的最大值作为输出;平均池化层,即将池化窗口中矩阵的平均值作为输出。近年来研究证明最大池化层较平均池化层有更好的效果[13]。
(3) 全连接层通常位于CNN的尾部,1个网络可以有多个全连接层。全连接层和传统的神经网络类似,其中的每个神经元都会与前一层的所有神经元相连,因此,全连接层包含数据的全局信息。将全连接层的每个神经元连接到Softmax函数,Softmax函数通常应用于分类问题的输出层,其功能是将预测结果用概率的形式显示:
式中:S(zm)为第m个 神经元的输出值zm通过Softmax函数转换为的概率;C为神经元个数;zc为第c个神经元的输出值。
2 行星齿轮箱故障诊断
基于多信息融合和CNN的行星齿轮箱故障诊断步骤如下。
(1) 将采集的行星齿轮箱振动信号和声音信号划分为训练集和测试集。
(2) 对信号进行数据预处理,将振动信号和声音信号进行数据层融合,采用并联方式将一维的振动信号和声音信号整合为一个二维信号。
(3) 确定CNN结构和参数,包括网络层数和各层维度大小,卷积核、最大池化层的核尺寸和步长,激励函数,学习率等。
(4) 将数据预处理后的训练集作为CNN输入,通过卷积和池化操作实现对数据的特征提取与信息过滤,之后通过BP算法反向调节网络参数。
(5) 利用训练好的CNN对测试集进行故障诊断,评估网络的故障诊断准确率。
2.1 数据预处理
将行星齿轮箱三向振动信号和声音信号作为CNN的输入,由于振动信号和声音信号都具有一维时序性,所以可将振动信号和声音信号进行数据层融合,采用数据并联方式将振动信号和声音信号整合为二维信号,该信号长度为截取的振动信号和声音信号的长度,信号宽度为信息源数目。本文分析的声音信号采样频率为44.1 kHz,由于声音信号是非平稳信号,但一般认为在短时间范围(30~50 ms)内,声音信号是短时平稳的[15],所以每帧数据长度为1 323~2 205。为便于计算机处理,将每帧数据长度设为2 048。同时,为了使数据对齐,将振动信号长度也设为2 048。
由于振动信号和声音信号的量纲不同,为消除影响,对数据进行标准化处理:

式中:X*为 标准化处理后的数据;X为振动和声音原始数据;为数据均值;σ(X)为数据方差。
2.2 CNN结构
CNN结构如图1所示。输入层为4×2 048的二维信号,经过3次卷积和最大池化操作后,将特征矩阵展平成一维向量(对每个卷积层输出的数据进行归一化处理和非线性映射后再接入池化层,其中非线性映射函数选择ReLU函数),在一维向量后面接入3个全连接层,用以连接所有特征,并将输出值送给输出层的分类器。由于输入层为数据层融合的信号,计算量大,所以本文采用自适应动量的优化方法——Adam方法进行学习率自动调整,该方法计算高效、所需内存少,适用于大规模的数据集[16]。
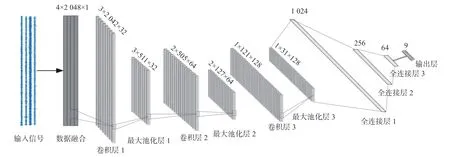
图1 CNN结构Fig. 1 Structure of CNN
CNN参数见表1。
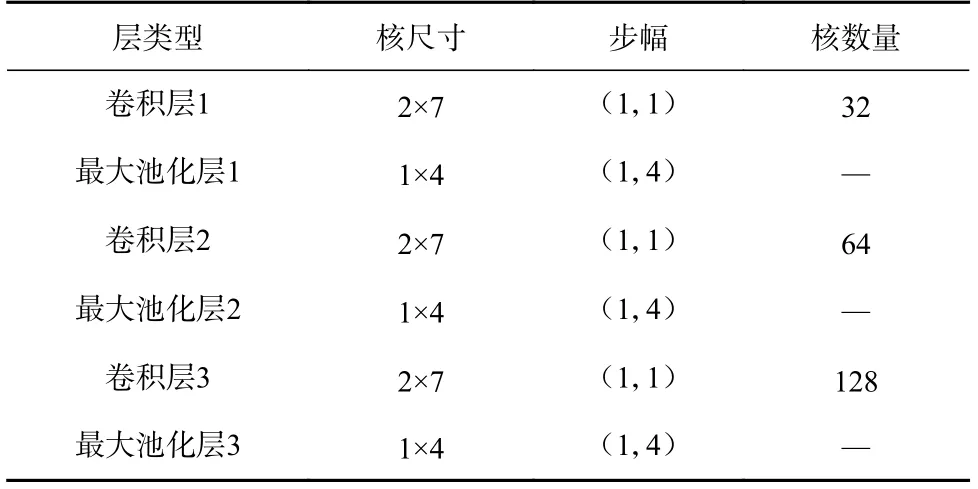
表1 CNN参数Table 1 Parameters of CNN
3 实验及结果分析
3.1 实验条件
搭建了行星齿轮箱故障诊断实验台,可模拟行星齿轮箱在不同负载、转速下的各种故障形式。实验台主要由三相异步电动机、联轴器、转矩转速传感器、行星齿轮箱、磁粉制动器、振动加速度传感器和声音传感器等组成,其中振动加速度传感器和声音传感器分别采集振动信号和声音信号,磁粉制动器作为一种负载装置,主要功能是为行星齿轮箱提供转矩。由于行星齿轮箱的高速输入轴更易发生故障,所以将故障植入在行星齿轮箱的高速输入轴。在高速输入轴的水平径向、垂直径向和轴向布置振动加速度传感器,在高速输入轴旁的转矩转速传感器上布置声音传感器,如图2所示。
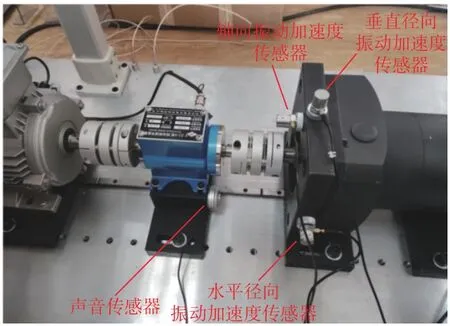
图2 传感器布置Fig. 2 Layout of sensors
通过实验台模拟行星齿轮箱正常状态和8种故障状态,如图3所示。在低速(300 r/min)、中速(600 r/mim)和高速(1 200 r/min)3种不同转速下,分别在5,10 N·m的负载下采集100组数据,获得数据集(表2),每种状态包含600组数据,每组数据长度为2 048。每种行星齿轮箱状态的振动信号时域波形如图4所示,可看出太阳轮断齿、行星轮磨损和轴承内外圈故障波形相比于正常状态的波形区分较为明显,其他故障较难与正常状态区分。
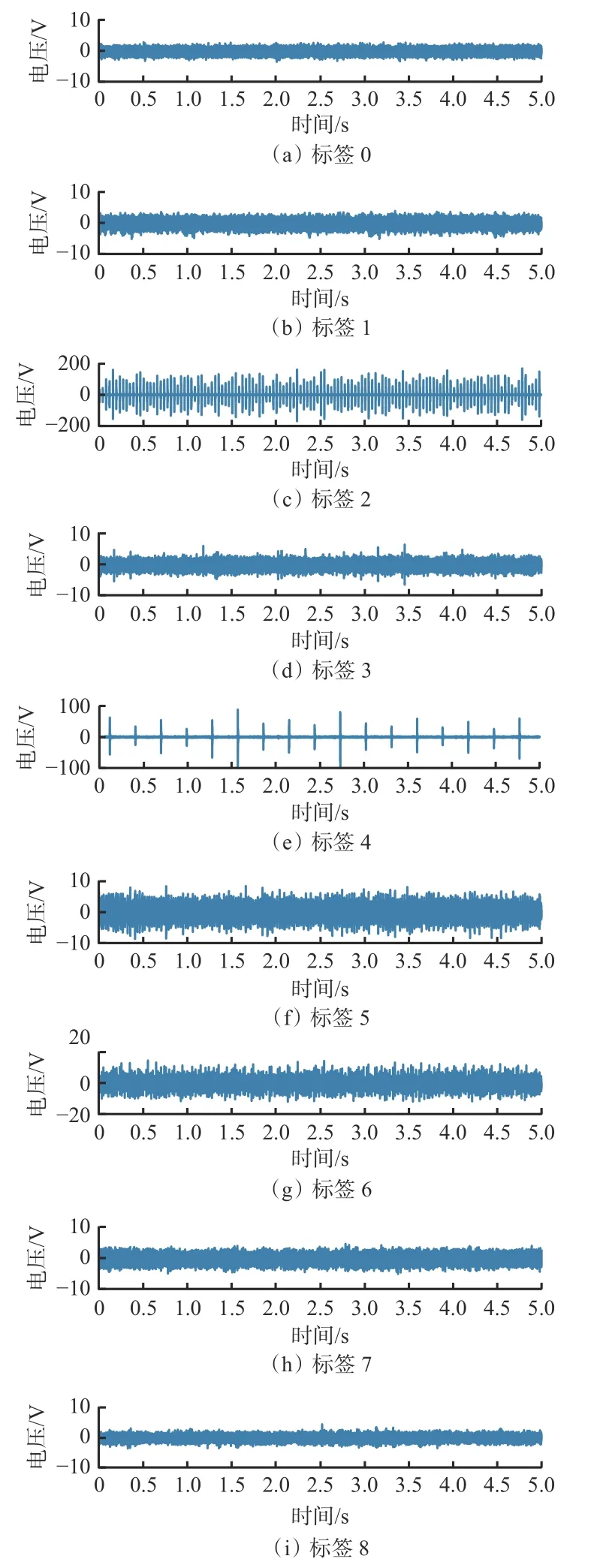
图4 行星齿轮箱不同状态的振动时域波形Fig. 4 Vibration time domain waveform of planetary gearbox in different status
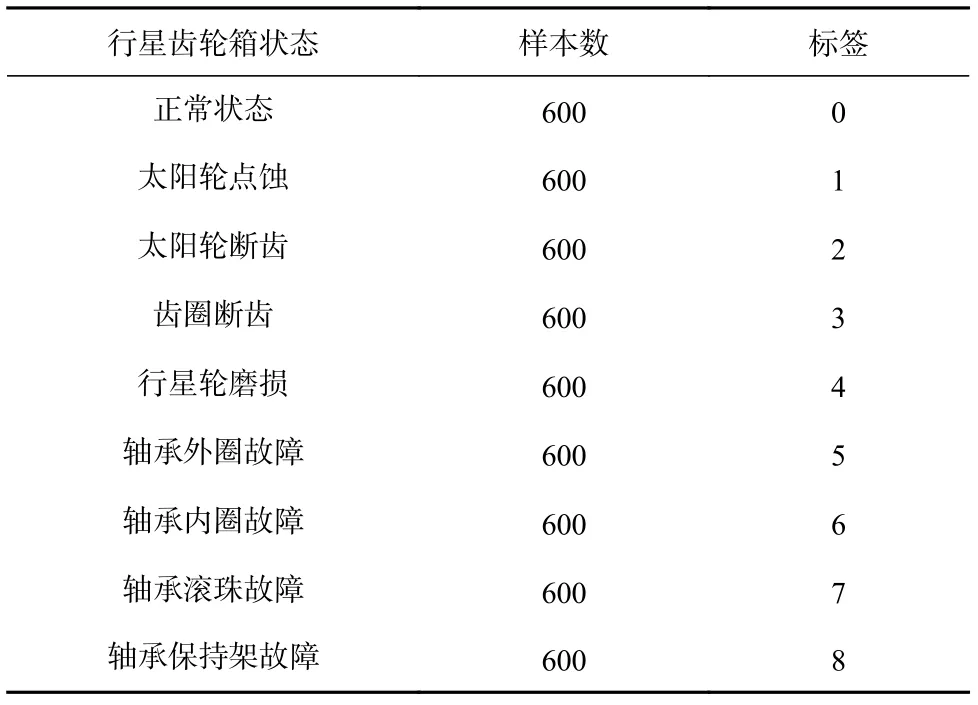
表2 数据集Table 2 Data set
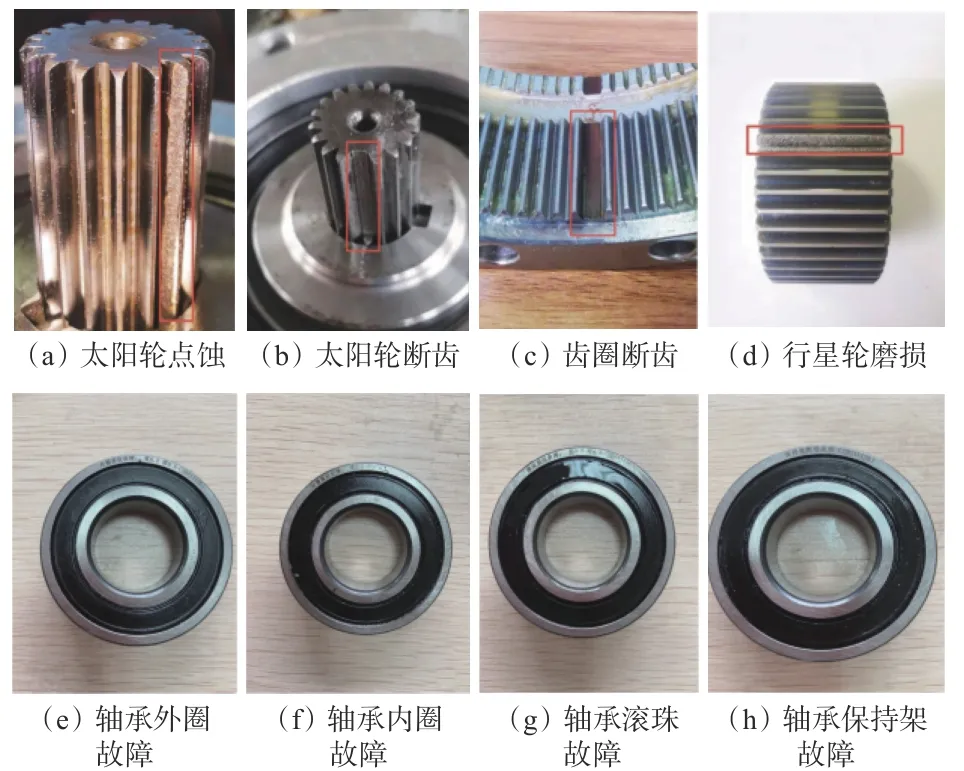
图3 行星齿轮箱故障状态Fig. 3 Fault states of planetary gearbox
将数据集分为训练集和测试集(随机选择80%的数据作为训练集,其余20%的数据作为测试集),用训练集进行网络训练,用测试集进行验证。
3.2 实验结果
为验证基于多信息融合和CNN的行星齿轮箱故障诊断方法的优越性,在相同条件下选取水平径向振动信号、垂直径向振动信号、轴向振动信号、声音信号4种单源信息分别与CNN相结合的方法进行对比。对于单源信息输入的CNN,其输入数据为长度为2 048的一维数据,卷积核尺寸为1×7,最大池化核尺寸为1×4,输出层维度为9,对应数据集中1种正常状态和8种故障状态的9个标签。不同方法在训练集和测试集上的故障识别准确率变化曲线如图5、图6所示,具体数据见表3。
从图5、图6及表3可看出:轴向振动信号+CNN和声音信号+CNN 2种方法在测试集上的故障识别准确率分别只有74.07%和75.13%,可能是由于行星齿轮箱故障在高速输入轴的轴向振动及声音方面表现不太敏感;水平径向振动信号+CNN和垂直径向振动信号+CNN 2种方法在测试集上的故障识别准确率分别达89.70%和87.09%,这是由于行星齿轮箱的高速输入轴在水平径向振动和垂直径向振动方面可能蕴含的故障信息更加丰富;多信息融合+CNN方法的收敛速度最快,且在测试集上的故障识别准确率最高,为93.33%,这是由于多信息融合+CNN方法可获得行星齿轮箱各方向的信号,所获得的故障信息量更大、提取的故障特征更多。
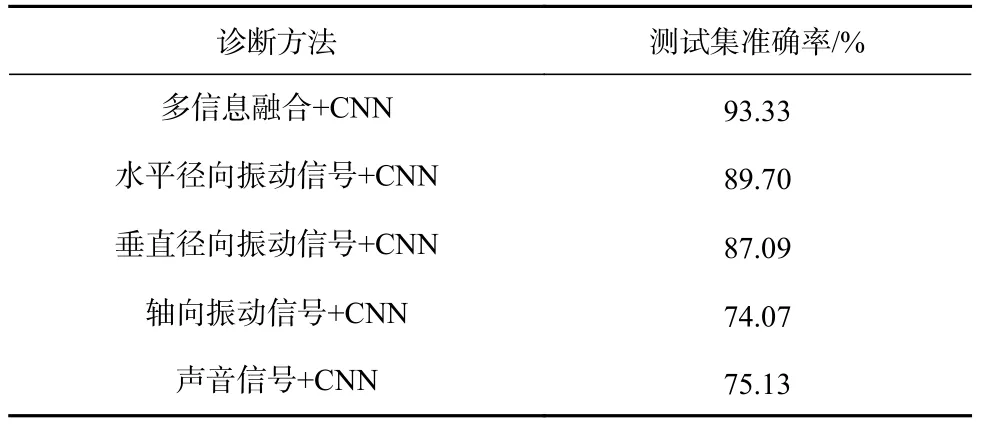
表3 不同方法的故障识别准确率Table 3 Fault identification accuracy of different methods
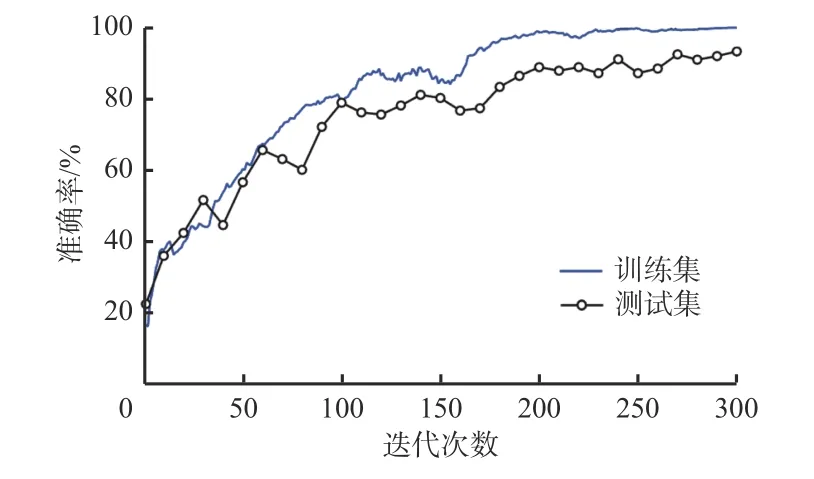
图5 基于多信息融合和CNN的故障识别准确率Fig. 5 Fault identification accuracy based on multi-information fusion and CNN
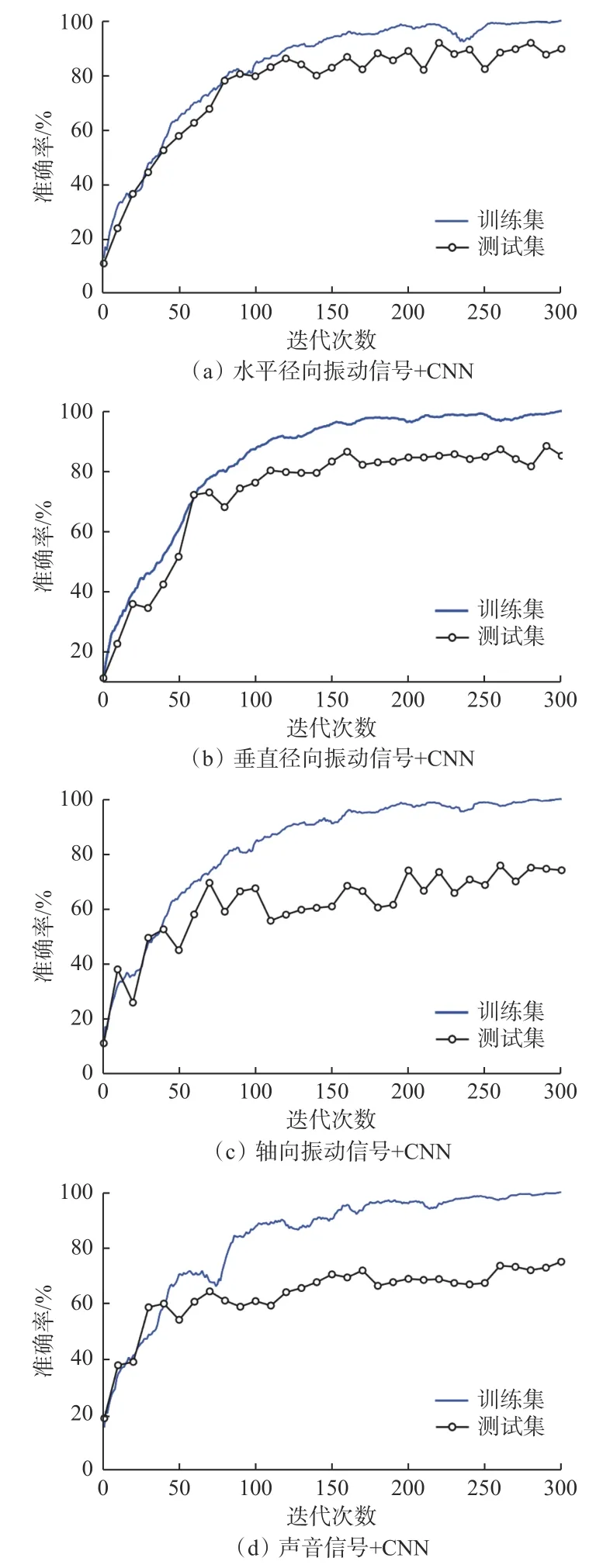
图6 基于单源信息和CNN的故障识别准确率Fig. 6 Fault identification accuracy based on single source information and CNN
4 结论
(1) 提出了一种基于多信息融合和CNN的行星齿轮箱故障诊断方法。在数据层实现多信息融合,将多个一维振动和声音信号通过并联整合为一个二维信号;将二维信号作为CNN的输入,利用多个卷积层进行深度特征提取,采用多个最大池化层进行信息过滤,通过Softmax分类器输出故障诊断结果。
(2) 搭建了行星齿轮箱故障诊断实验台,采集不同转速和负载工况下的振动和声音信号,并输入网络中进行训练和验证。实验结果表明,相较于单源信息+CNN,多信息融合+CNN的收敛速度更快,且具有更高的故障识别准确率,达93.33%,更适用于行星齿轮箱故障诊断。
