轮毂电机电动汽车半主动悬架模型预测控制
2022-10-12吴楚骐
江 洪,陈 勃,吴楚骐
(江苏大学 机械工程学院,江苏 镇江 212013)
0 引言
目前,电动汽车因具有能源利用率高、污染少等优点得到快速发展。随着汽车保有量的迅速增加、环境污染以及能源短缺等问题日益严重,发展电动汽车已成为实现节能减排、减少环境污染的有效途径,近年来轮毂电机电动汽车的使用率不断提高[1]。
悬架系统关系到车辆的乘坐舒适性和行驶安全性,选择合理的控制策略,以及使用有效的控制算法对提升半主动悬架系统的减振性能具有关键作用[2]。空气悬架属于半主动悬架,具有寿命长、内摩擦小、质量轻等优点,可有效改善车辆行驶平顺性,对高频振动具有很好的消声隔振能力[3]。阻尼可调空气悬架由于其弹簧刚度和减振器阻尼均可调、能吸收高频振动、隔振性能好等优势在汽车行业得到快速发展[4]。
轮毂电机电动汽车取消了离合器、变速器、传动轴、差速器等部件,使底盘结构得到进一步简化,可以实现四轮独立驱动,使控制更加精确,有效提高了车辆行驶的稳定性[5]。面对轮毂电机驱动汽车非簧载质量增加和轮毂电机不平衡电磁力带来的振动负效应问题,李仲兴等[6]提出了一种自适应线性二次型调节器半主动悬架控制策略,有效提高了车辆的行驶平顺性和操纵稳定性。陈龙等[7]为提高车辆行驶平顺性,提出了一种基于阻尼多模式切换减振器的车辆半主动悬架及其控制方法。
董炳辰等[8]为了提高车辆行驶平顺性和操作稳定性,以工程车辆半主动悬架为研究对象,基于比例积分微分和增量式算法原理,提出了一种用于工程车辆半主动悬架的增量式PID控制方法。马英照等[9]开发了新型空气悬架系统集成控制系统,有效改善了车辆的稳定性。李哲等[10]为控制车辆垂向振动,对控制器参数进行了多目标优化。武柏安等[11]提出了一种基于遗传算法的半主动悬架最优控制方法,应用遗传算法来确定最优控制器的加权系数,提高了车辆的平顺性。赵亮亮等[12]为抑制路面不平引起的车身振动响应问题,搭建了半车半主动悬架仿真模型,设计了半主动悬架控制器,有效提高了车辆行驶的舒适性。
以上学者为抑制轮毂电机振动和提升悬架性能,对车辆悬架和轮毂电机控制系统进行了研究和改进,大多数学者考虑使用四分之一车辆模型或半车车辆模型对悬架系统进行控制研究,本文通过建立整车九自由度悬架系统模型,提出一种在处理多输入多输出控制系统中具有突出优势的半主动悬架模型预测控制方法,有效地改善了轮毂电机电动汽车的垂向性能。
1 HM-EV系统建模
轮毂电机电动汽车悬架系统是复杂的机电耦合系统,包括轮毂电机、悬架和车轮。整车9自由度HM-EV模型包括3部分:无刷直流电机(brushless direct current motor,BLDC)模型,该部分的模型可为车轮和悬架提供不平衡电磁力;路面随机激励模型,为系统提供外部激励;整车动力学模型,强调车辆的动态响应。
1.1 不平衡电磁力模型
BLDC电机具有传动效率高、结构紧凑等优点。本文采用外转子BLDC电机作为轮毂驱动电机。
外转子BLDC的电流方程如下:
(1)
式中:ua、ub和uc分别为电机三相电压,V;R表示定子绕组的等效电阻,Ω;L表示轮毂电 机定子绕组自感,H;M表示绕组互感,H;ia、ib和ic分别为轮毂电机三相电流,A;ea、eb和ec分别为轮毂电机三相绕组反电动势,V。
在不考虑各种损耗的情况下,认为电机的输入功率全部转换为电磁功率,因此电机的电磁转矩方程可表示为:
(2)
式中:Te为电机电磁转矩,N·m;ωm为转子角速度,rad/s。
轮毂电机电动汽车在路面激励和簧载质量的耦合作用下,定转子间会发生相对位移,轮毂电机产生偏心现象,电机气隙分布不均,气隙磁场会产生畸变,从而诱发不平衡电磁力,导致电机不良振动。为分析偏心状态下的轮毂电机气隙磁场,采用磁导修正系数的方法[13-14],对无偏心状态下的轮毂电机的气隙磁场进行修正,以获得偏心状态下的气隙磁场。BLDC轮毂电机偏心示意图如图1所示。

图1 轮毂电机定转子偏心示意图
图1中,O为轮毂电机外转子的几何中心,O′为轮毂电机内定子的几何中心,e为电机偏心距,即电机定子中心O′与转子中心O的距离。则有效气隙长度δ计算满足:
(3)
式中:δ0为电机实际气隙长度,m;hm为永磁体厚度,m;μr为相对回复磁导率。有效偏心率ε满足:
(4)
则偏心时的磁导修正系数为:
(5)
则轮毂电机偏心状态下气隙径向磁场Ber和气隙切向磁场Bet计算式为:
Ber(r,α,t)=[Bmr(r,α,t)+Bαr(r,α,t)]εδ
(6)
Bet(r,α,t)=[Bmt(r,α,t)+Bαt(r,α,t)]εδ
(7)
式中:r为极坐标系极径,m;α为极坐标系空间角度,rad;t为时间,s;Ber为偏心状态下的径向气隙磁场;Bmr为永磁体的径向磁场;Bαr为电枢反应的径向磁场;Bet为偏心状态下的切向气隙磁场;Bmt为永磁体的切向磁场;Bαt为电枢反应的切向磁场。
根据文献[15]提出的气隙磁密公式,轮毂电机垂向不平衡电磁力Fez和纵向不平衡电磁力Fex可表示为:

2[Ber(r,α,t)2·Bet(r,α,t)]cosα}dα
(8)

2[Ber(r,α,t)2·Bet(r,α,t)]sinα}dα
(9)
式中L为电机轴向长度,m。
1.2 路面随机激励模型
路面是悬架系统的主要激励,在实际道路上行驶时,由于左右两侧路面具有相干性,前后轮具有滞后性,需要建立整车四轮随机路面激励的时域模型,因此建立考虑前左轮路面激励、前右轮路面激励和后轴路面激励的四轮车轮随机路面激励模型。
1.2.1前左轮路面激励
路面激励服从均值为零的正态分布,并以功率谱来描述其统计特性。根据国标GB/T 7031—2005,可用下式表示路面不平度的频率谱密度:
(10)
式中:n为空间频率,m-1;n0为参考空间频率,取值0.1 m-1;Gq(n0)为参考空间频率下的功率谱密度,m3;W为频率指数,W=2,其值决定了路面功率谱的频率结构。
根据GB/T 7031—2005标准规定,路面空间频域速度功率谱密度为:
(11)
道路速度信号是具有有限带宽的白噪声,因此白噪声可以通过滤波生成道路高程的时域信号。过滤器为
(12)
式中:f0为截止频率,f0=0.01 Hz。则路面时域信号为:
(13)
式中,ω(t)为白噪声。
1.2.2前右轮路面激励
车辆在行驶过程中,考虑到路面不平,因此左右两侧车轮受到的路面激励也有差异,为了描述左右两侧车轮受到的路面激励,可用相干度函数γ来表示:
(14)
式中:Tw为轮距,m;p为参考因子;α为轮距Tw的常数指数,对于各向同性过程,α=1。
对于给定的左右路面激励q1(t)和q2(t),则q1(t)对q2(t)的传递函数G(s)可写作:
(15)
式中,Q1(s)和Q2(s)分别为q2(t)和q1(t)的拉普拉斯变换。结合(14)和(15)两式,则
|G(s)|=|γ(n,Tw)|
(16)
则车辆前轴左右两侧路面激励:
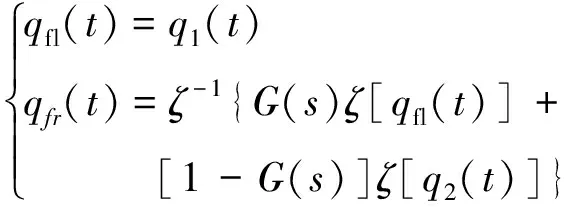
(17)
1.2.3后轴左右路面激励
假设车辆直线行驶,此时车辆前后两轮行驶过的路面大致相同,但后轮路面激励相较于前轮路面激励存在一定的滞后。后轮左右路面激励为:

(18)
式中,t≥τ,τ为滞后时间,为车辆轴距与车速的商。
为解决滞后难以线性化的问题,可通过复数域利用传递函数来描述:
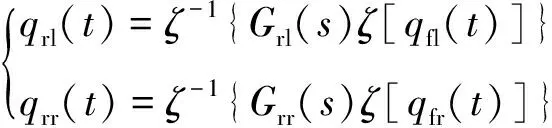
(19)
式中,Grl(s)和Grr(s)分别为qrl(t)对qrr(t)的传递函数和qrr(t)对qrr(t)的传递函数。
根据以上四轮路面激励模型,在C级路面,车速为20 m/s的行驶工况下,各轮对应的路面激励幅值如图2所示。

图2 C级路面四轮激励幅值
1.3 轮毂电机电动汽车半主动悬架整车动力学模型
车辆动力学模型作为半主动悬架控制的基础,其精度对悬架控制精度具有重要作用,同时也会影响控制器的计算能力,因此,设计合适的车辆动力学模型以及使用匹配的控制器直接影响半主动悬架系统的控制效果。
本文采用一体式轮毂电机与空气悬架系统,结构如图3所示,包括轮胎、轮毂电机、电控装置、制动器、轮毂以及空气悬架系统。轮毂电机为外转子内定子结构,轮毂轴承作为运动连接件和载荷支撑件,在垂向等效为高刚度弹簧,空气悬架系统包括空气弹簧和减振器,电机转子固定在轮毂上。在对悬架的控制理论和概念进行研究时,整车模型可完整的体现车辆的垂直跳动、侧倾变化以及俯仰的问题。

图3 轮毂电机与空气悬架结构示意图
根据后续研究需要,建立以试验样车实际结构为依据的九自由度整车动力学模型,该车型采用的是后轮轮毂电机驱动方式,假设车身为刚体,只考虑系统的垂向振动,并对其进行适当简化。前轮位置考虑2个簧下质量的垂向振动、后轮以轮毂电机气隙为分界面,将轮毂电机外转子和内定子拆分,将电机轴承等效为高刚度弹簧,从而簧下质量分为2个部分:一部分是由定子质量块和部分非簧载质量块组成的振动系统,另一部分是由转子质量块和轮胎组成的振动系统、以及簧上质量的侧倾、俯仰和垂向振动,共9个自由度。简化后的半主动空气悬架九自由度整车模型如图4所示。
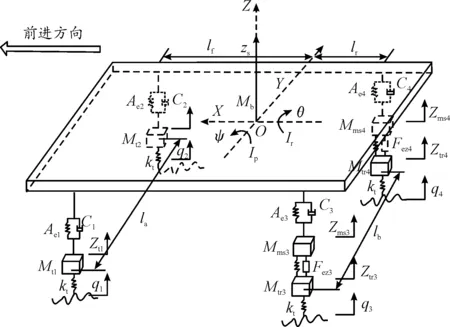
图4 整车空气悬架动力学模型示意图
根据车辆动力学,该后轮轮毂电机驱动电动汽车空气悬架系统动力学方程可表示为:
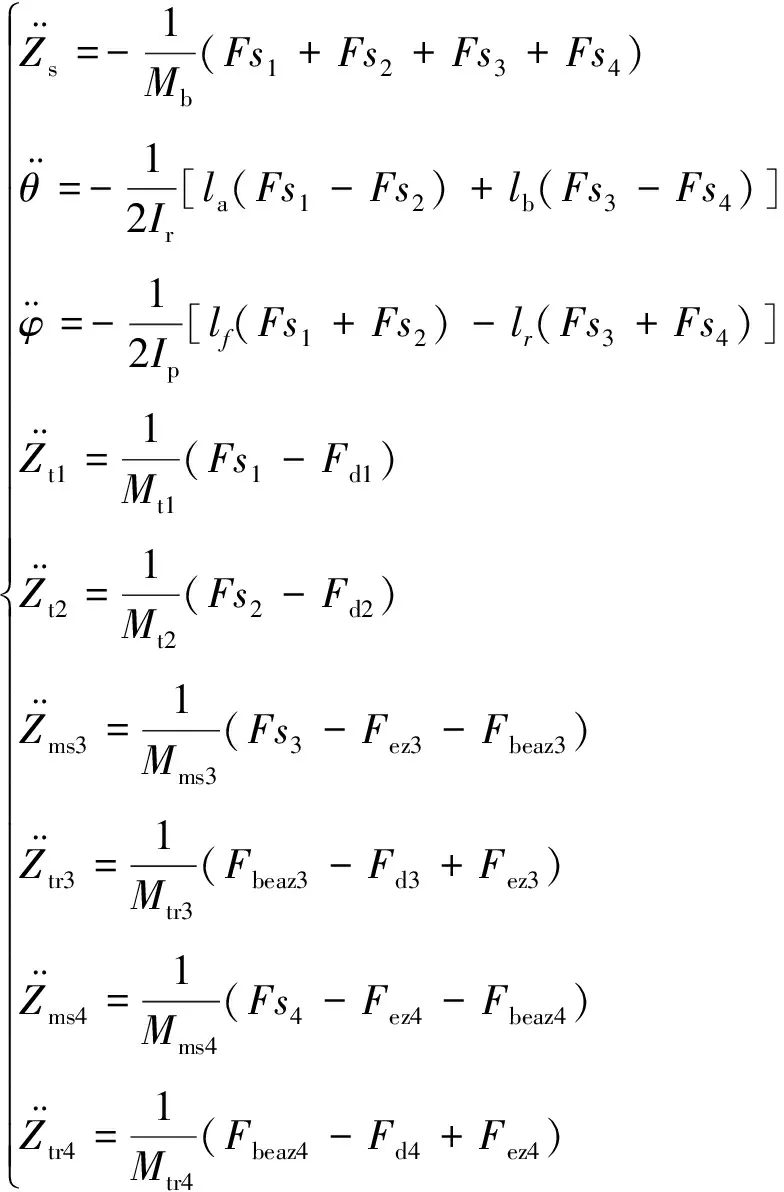
(20)
式中,
其中:Mb表示簧载质量,kg;Ir和θ分别为簧上质量绕x轴的侧倾转动惯量,kg·m2和簧上质量侧倾角,rad;Ip和φ分别为簧上质量绕y轴的俯仰转动惯量,kg·m2和簧上质量俯仰角,rad;lf和lr分别为前、后轴到质心的距离,m;la和lb分别为前、后轴车轮左右轮距,m;Mt1和Mt2分别为车辆左前轮、右前轮位置处的簧下质量,kg;Mms3和Mms4分别为车辆左后轮、右后轮轮毂电机定子铁芯质量块和部分非簧载质量块质量,kg;Mtr3和Mtr4分别为车辆左后轮、右后轮轮胎和转子铁芯质量块质量,kg;Zs为簧载质量垂向位移,m;Zt1和Zt2分别为左前轮、右前轮簧下质量的垂向位移,m;Zms3和Zms4分别为车辆左后轮、右后轮定子铁芯质量块和部分非簧载质量块垂向位移,m;Ztr3和Ztr4分别为车辆左后轮、右后轮轮胎和转子铁芯质量块垂向位移,m;q1、q2、q3、q4分别为车辆左前轮、右前轮、左后轮和右后轮位置处的路面垂向激励,m;kt为轮胎的垂向刚度,N/m;kbe为轮毂电机轴承垂向刚度,N/m;Fez3和Fez4分别为车辆左后轮、右后轮轮毂电机垂向不平衡电磁力,N;Ae1、Ae2、Ae3和Ae4分别为车辆左前轮、右前轮、左后轮和右后轮位置处空气弹簧初始有效面积,m2;κ为多变系数;P0为空气弹簧初始气压,Pa;Pa为标准大气压强,Pa;C1、C2、C3和C4分别为车辆左前轮、右前轮、左后轮和右后轮位置处减振器阻尼系数,N·s/m;Fspr为空气悬架的空气弹簧力,N;Fdam为减振器阻尼力,N;Fd为轮胎动载荷,N;Fbeaz为轮毂电机垂向轴承力,N;Fez为轮毂电机垂向不平衡电磁力,N;fd为悬架动行程,m;Fu为悬架阻尼控制力,N。
2 轮毂电机与空气悬架系统模型预测控制
2.1 MPC控制器设计
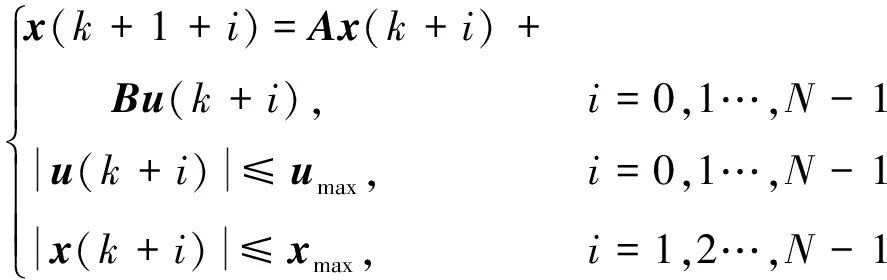
模型预测控制通过动态模型来预测被控对象的未来行为,通过预测模型、滚动优化以及反馈校正3个步骤完成控制过程,对处理多输入多输系统具有显著优势,在控制过程中,可增加多种模式的约束,以满足车辆动力学的要求。在每个采样时间内,MPC根据系统的状态,将控制问题转化为N步有限时域开环最优控制问题。MPC得到最优控制变量{u(k),u(k+1),…,u(k+N-1)},通过在线计算方法将第一个控制变量u(k) 施加给系统,下一时刻根据系统输出与预测输出之间的误差对未来输出进行修正。一些研究已经将MPC控制方法应用于半主动悬架系统,然而,大多数研究只考虑了四分之一车辆模型,本文提出考虑整车模型的模型预测控制方法。根据式(20)中的动力学方程,系统的状态空间可以表示为:

(21)

系统输出定义为车辆簧载质量垂向振动加速度;左后轮、右后轮轮毂电机偏心距;四轮轮胎动载荷;车辆侧倾角速度以及俯仰角速度。
(22)
MPC是在离散时间域求解最优问题,因此需要通过采样时间Ts和零阶保持器将已有的连续时间状态方程进行离散化处理,离散化后的状态方程可以表示为:

(23)
式中,
Ad=eATs=L-1{(sI-A)-1}t=Ts
Cd=C
Dd=D
其中:Ts为采样时间;τ为积分时间常数。
2.2 约束与目标函数
考虑到悬架动行程受悬架结构约束,则对轮胎动载荷施加约束|Fdi|≤3 000 N,同时考虑控制力|Fu|≤5 000 N。
MPC控制器的目标是找到最优控制率u(k),在约束条件下优化车辆的行驶平顺性和操纵稳定性,通过求解目标函数最小值,找到当前时刻目标函数最小值的控制向量u(k),此时u(k)中的元素即为所求控制力Fu。优化的目的是使目标函数最小,其表达式为:
(24)
式中:
3 仿真结果
仿真模型在车速为20 m/s的C级别路面激励输入下稳定运行5 s。模型的相关参数如表1所示。为了体现MPC控制策略对悬架系统行驶平顺性的改善效果,引入未控制的半主动悬架进行比较,仿真分析系统评价指标的时域对比效果和频域对比效果[16]。结果如图5、图6和表2所示。
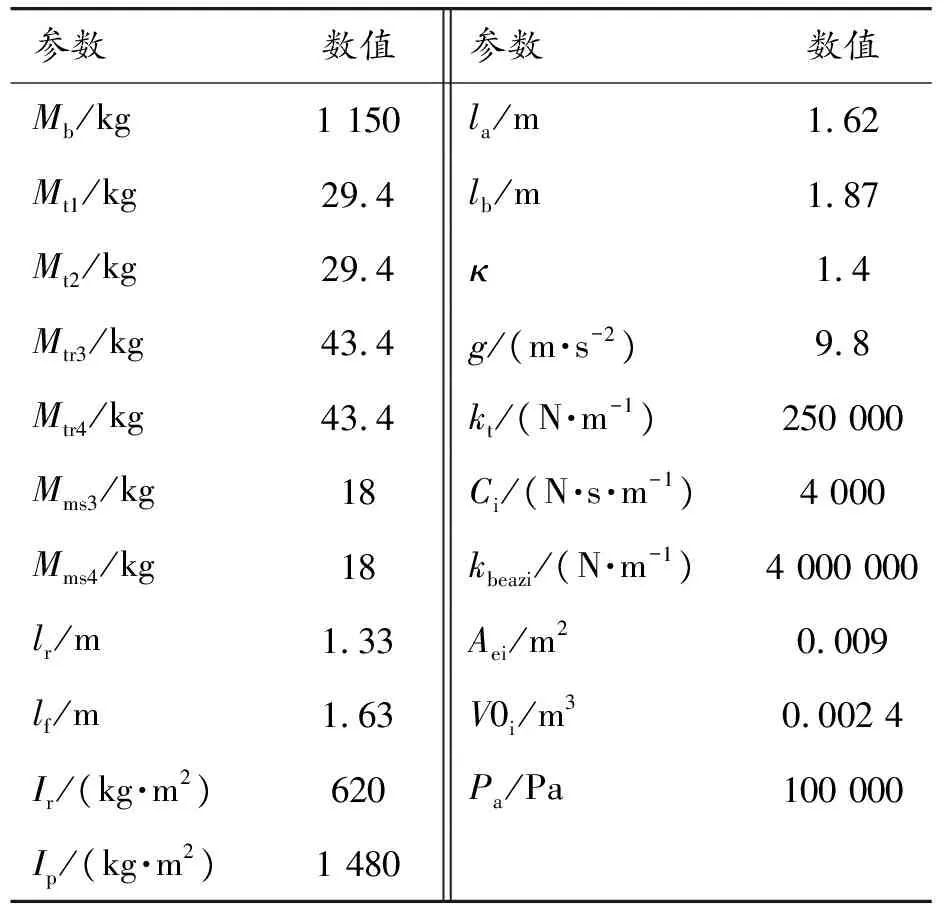
表1 模型参数

图5 轮毂电机电动汽车系统垂向性能控制对比
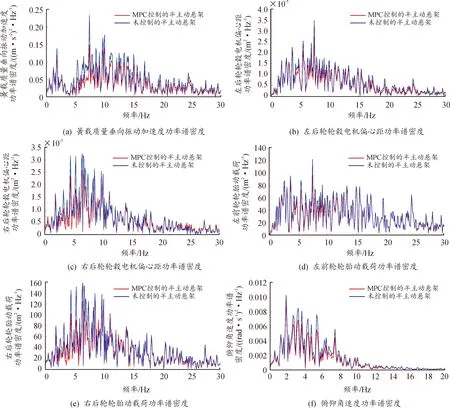
图6 MPC控制效果功率谱密度
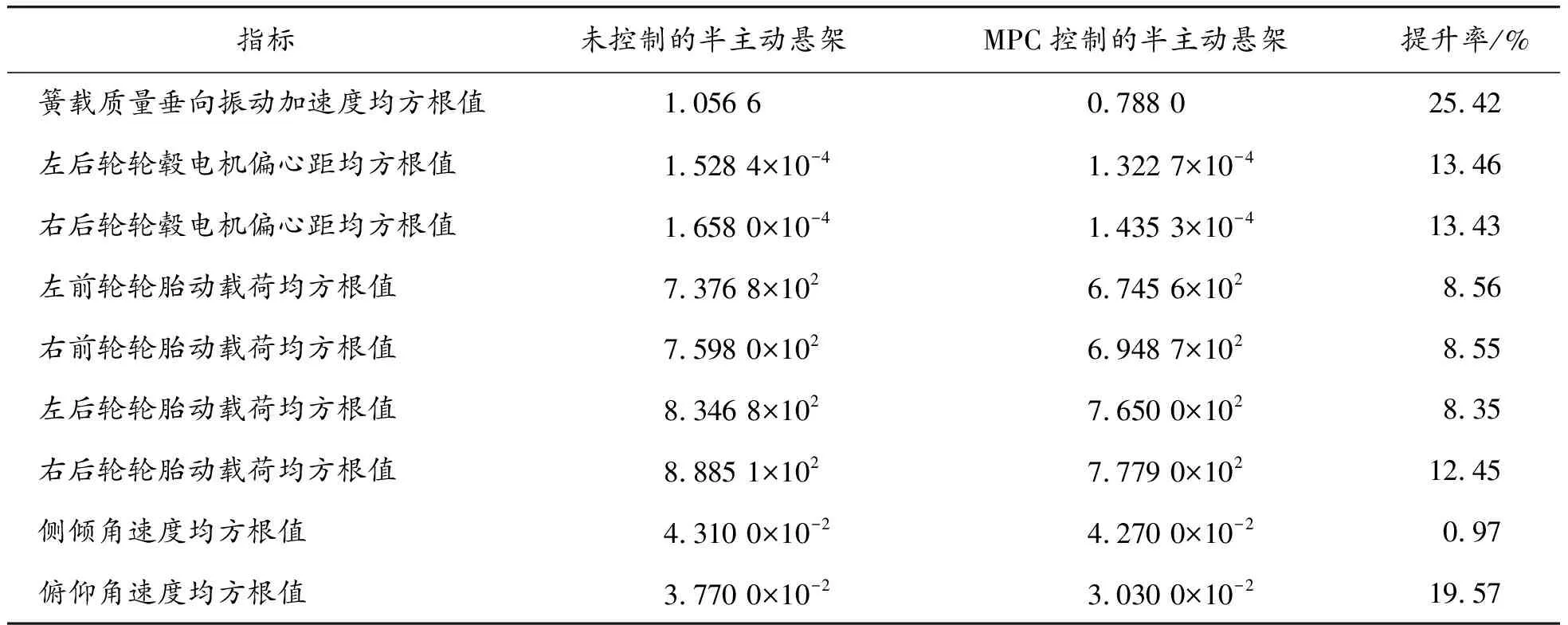
指标未控制的半主动悬架MPC控制的半主动悬架提升率/%簧载质量垂向振动加速度均方根值1.056 60.788 025.42左后轮轮毂电机偏心距均方根值1.528 4×10-41.322 7×10-413.46右后轮轮毂电机偏心距均方根值1.658 0×10-41.435 3×10-413.43左前轮轮胎动载荷均方根值7.376 8×1026.745 6×1028.56右前轮轮胎动载荷均方根值7.598 0×1026.948 7×1028.55左后轮轮胎动载荷均方根值8.346 8×1027.650 0×1028.35右后轮轮胎动载荷均方根值8.885 1×1027.779 0×10212.45侧倾角速度均方根值4.310 0×10-24.270 0×10-20.97俯仰角速度均方根值3.770 0×10-23.030 0×10-219.57
由图5的时域对比图和表2可知,所设计的MPC控制器能够有效提高系统的垂向性能。相比未控制的半主动悬架,使用MPC控制器后,车辆的簧载质量垂向振动加速度均方根值、左后轮轮毂电机偏心距均方根值、右后轮轮毂电机偏心距均方根值、左前轮轮胎动载荷均方根值、右前轮轮胎动载荷均方根值、左后轮轮胎动载荷均方根值、右后轮轮胎动载荷均方根值、侧倾角速度、俯仰角速度分别提升了25.42%、13.46%、13.43%、8.56%、8.55%、8.35%、12.45%、0.97%与19.57%。
如图6所示,将MPC控制的半主动悬架的簧载质量垂向振动加速度、轮毂电机偏心距、轮胎动载荷和俯仰角速度功率谱密度与未控制的半主动悬架进行对比。图6(a)中,MPC控制的簧载质量垂向振动加速度在整个频域范围内降低幅度较大,表明MPC控制的半主动悬架可有效抑制路面激励以及轮毂电机因偏心产生的不良振动对簧载质量振动的影响;图6(b)和6(c)中,轮毂电机偏心距在控制后的功率谱密度在中低频区域内降低幅度较大,高频区域变化幅度小,从总体上看,轮毂电机偏心距降低较大,表明MPC控制器可有效降低轮毂电机偏心距;图6(d)和6(e)中,MPC控制的轮胎动载荷功率谱密度在中低频区域内降低较明显,高频区域下降趋势小,表明MPC控制的半主动悬架可有效降低来自路面激励和轮毂电机不平衡电磁力对轮胎动载荷的影响;图6(f)中,MPC控制的俯仰角速度功率谱密度在中低频区域内下降幅度大,高频区域变化小,但保持着下降趋势,表明MPC控制的半主动悬架可有效降低俯仰角速度。
从图5和图6可知,所设计的MPC控制器能有效改善悬架性能,提高轮毂电机电动汽车系统的乘坐舒适性和行驶平顺性。
4 结论
本文分析了空气悬架、轮毂电机和车轮之间的作用机理,建立了9自由度整车HM-AS系统模型。以改善簧载质量垂向振动加速度、轮毂电机偏心距、轮胎动载荷、侧倾角速度和俯仰角速度为目标,提出一种基于动态模型来对系统未来行为进行预测的模型预测控制策略,使用多项评价指标全面的评价悬架性能。通过仿真的时域图和频域图对比分析可知,所提出的模型预测控制方法有效地减小了簧载质量垂向振动加速度、轮毂电机偏心距、轮胎动载荷、侧倾角速度和俯仰角速度,充分提高了车辆的行驶平顺性和操纵稳定性,仿真分析验证了所提MPC控制方法的有效性。